適用于新能源并網的VSC-MTDC系統協調控制策略
2018-11-09 04:57:56劉英培解賽梁海平王正平邢志坤鄭連躍
電力建設 2018年11期
劉英培,解賽,梁海平,王正平,邢志坤,鄭連躍
(1.華北電力大學電氣與電子工程學院,河北省保定市 071003;2. 國網滄州供電分公司,河北省滄州市 061001;3. 國網海興供電分公司,河北省滄州市 061200)
0 引 言
以風電、光伏為代表的新能源并網時出力具有間歇性和不確定性等特點[1-2],對所連系統在功率調節方面提出了更高的要求。由于電壓源型換流器(voltage source converter, VSC)具有有功功率和無功功率的解耦控制、潮流反轉時直流電壓極性不變和可以向無源網絡供電等諸多功能[3-4],因此,基于電壓源型換流器構建的多端柔性直流(voltage source converter multi-terminal direct current,VSC-MTDC)輸電技術可以解決多電源供電以及多落點受電問題,提高電能質量和傳輸效率,增大供電半徑,有效解決電網諧波、三相不平衡等一系列問題,在新能源并網、大容量遠距離電能輸送以及新增城市直流配電網等領域有著廣泛的應用前景[5-7]。
與兩端系統相比,多端直流輸電系統的多個換流站間可以實現功率的相互協調,因此具備更高的靈活性和可靠性,同時控制策略也更加復雜[8]。主從控制的優勢在于采用定直流電壓控制的換流站可以平衡系統中的功率變化,將直流電壓維持在額定值附近,尤其適用于功率變化頻繁的直流配電網中的應用[9]。電壓下垂控制的優勢在于進行功率調節時可以確保每個具備功率調節能力的換流站都能參與不平衡功率的調節,提高系統的穩定性[10]。文獻[10]提出了一種適用于功率共享的自適應下垂控制方法,針對換流站不同的功率裕度,實現不平衡功率的靈活分配,但未考慮多個換流站間直流電壓的誤差,會導致某一換流站直流電壓達到允許波動的極限時,其余換流站仍存在較大可用功率容量。該問題在線路電阻較大的直流配電網的應用中更為明顯。文獻[11]提出了一種包含功率共享的通用直流電壓下垂控制策略,采用分層控制結構,結合3種控制模式,提高了電壓下垂控制的功率共享能力,增強了系統的可操作性,但控制較為復雜。文獻[12]將平移下垂曲線和改變下垂曲線斜率相結合,消除靜態偏差,將直流電壓限制在允許范圍內,但當換流站下一個穩態的有功功率值為換流站的額定功率時,無法實現消除直流電壓靜態偏差的效果。文獻[13-14]均可實現最優功率分配,但須依賴通信系統。文獻[15]指出,在實際工程中,潮流波動過程時間比通信系統所需時間長,因此可以應用通信改進功率調節的實用性,但應考慮當通信中存在較長時間的延遲或通信中斷時系統仍可維持穩定運行,降低系統對于通信的依賴性。
針對新能源并網的VSC-MTDC輸電系統中各換流站之間功率協調控制的問題,提出一種適用于VSC-MTDC系統的協調控制策略。通過多個換流站分擔采用定直流電壓控制的主換流站有功功率的方式,使主換流站不易達到滿載,從而維持直流電壓在額定值附近,尤其適用于新能源并網時出力頻繁波動的情況;當主換流站滿載或退出運行時,其余不平衡功率由采用自適應下垂控制的換流站承擔,根據換流站的功率裕度將系統中的不平衡功率進行合理分配;調節過程中下垂系數固定,使調節更為簡單、穩定;由于新能源并網時的電壓等級一般較低,線路電阻較大,容易導致多個換流站間直流電壓存在較大誤差,故引入直流電壓極限值調節。當系統中任一換流站直流電壓達到允許波動的極限時,所有采用自適應下垂控制的換流站同時達到滿載,可以最大限度地利用換流站的有功功率容量,維持直流電壓穩定。仿真結果驗證所提控制策略的可行性和有效性。
1 VSC-MTDC系統數學模型
五端柔性直流輸電系統結構圖[16-17]如圖1所示。Pi、Qi(i=1,2,…,5)分別為換流站輸出的有功功率和無功功率,以注入直流電網為參考正方向;B1、B2分別為輸電線路兩側的直流母線。
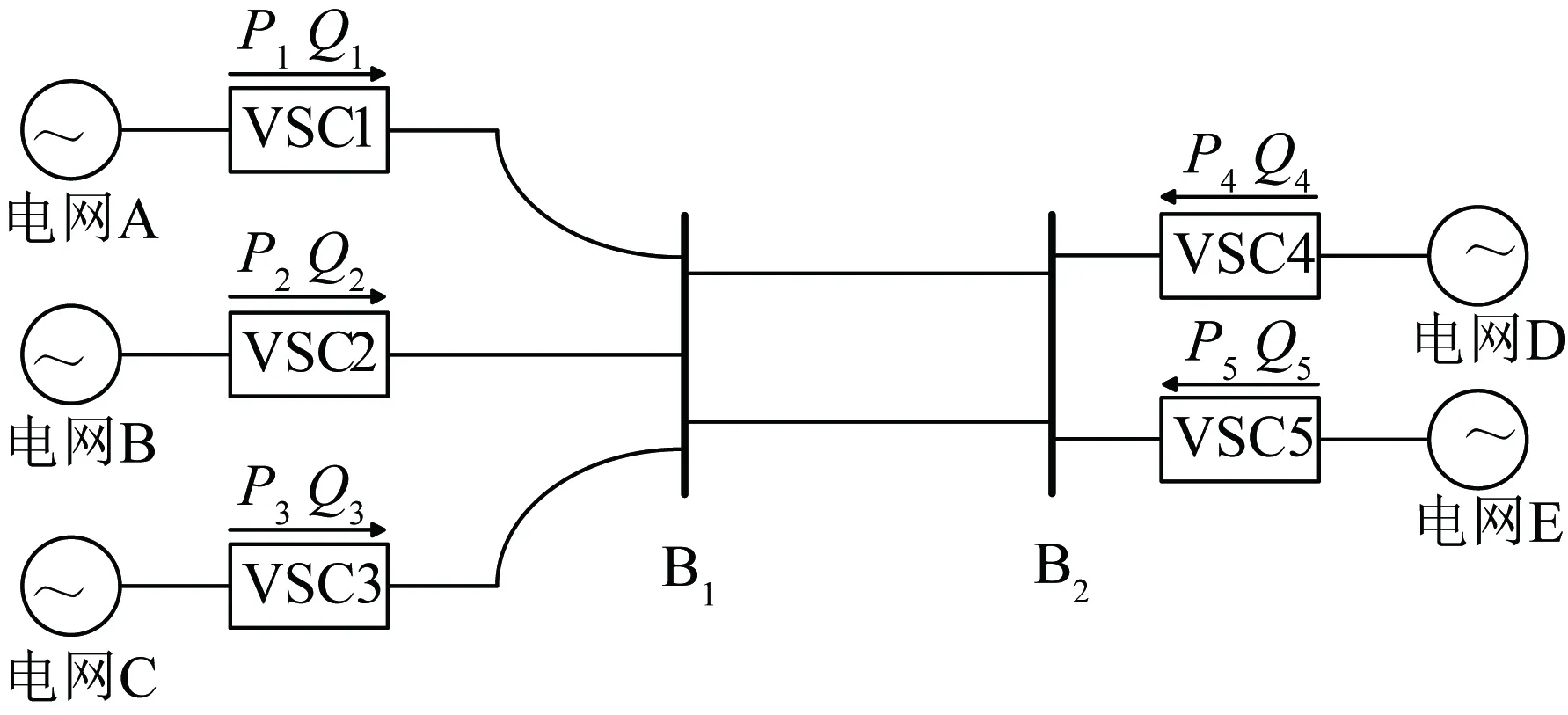
圖1 五端柔性直流輸電系統結構圖Fig.1 Structure diagram of five-terminal VSC-HVDC transmission system
VSC結構圖如圖2所示。在abc三相坐標系下,Usa、Usb、Usc分別為電網電壓的向量;Ua、Ub、Uc分別為VSC交流側電壓的向量;Isa、Isb、Isc分別為電網電流的向量;R、X分別為VSC交流側等效電阻和電抗;Udc為直流側電壓。
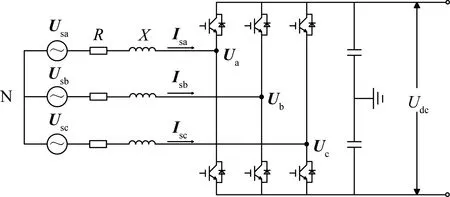
圖2 VSC結構圖Fig.2 VSC structure diagram
在兩相旋轉dq坐標系下VSC的數學模型為[18-19]
(1)
式中:L為VSC交流側等效電感;usd、usq分別為電網電壓的d、q軸分量;ud、uq分別為VSC交流側電壓的d、q軸分量;isd、isq分別電網電流的d、q軸分量;ω為電網電壓矢量同步旋轉角速度。
2 VSC-MTDC系統協調運行策略
假設VSC-MTDC系統中共有n個換流站,選取額定容量較大的1個換流站作為主換流站,如選取VSC1作為主換流站,采用定直流電壓控制。當系統中的不平衡功率在主換流站調節范圍內時,由主換流站單獨進行調節。當主換流站滿載或退出運行時,多余的不平衡功率由采用下垂控制的換流站進行調節,如VSC2,VSC3,…,VSCm采用下垂控制;系統中的不平衡功率會導致直流側電壓發生變化,采用下垂控制的換流站根據變化后的直流電壓自動調節換流站輸出的有功功率,使系統功率重新達到平衡[10]。其余n-m個換流站采用定有功功率控制,用于新能源接入。
2.1 多個換流站分擔主換流站功率

(2)
將Plim與所有采用下垂控制換流站的功率之和按采用下垂控制換流站的額定有功功率重新分配,避免換流站滿載。主換流站功率處于-Plim~Plim時功率分配不動作,避免了功率的頻繁調節。設Udcref為換流站直流電壓額定值,傳統的定直流電壓控制特性曲線如圖3所示,新型的定直流電壓控制特性曲線如圖4所示,圖中P為換流站的有功功率。
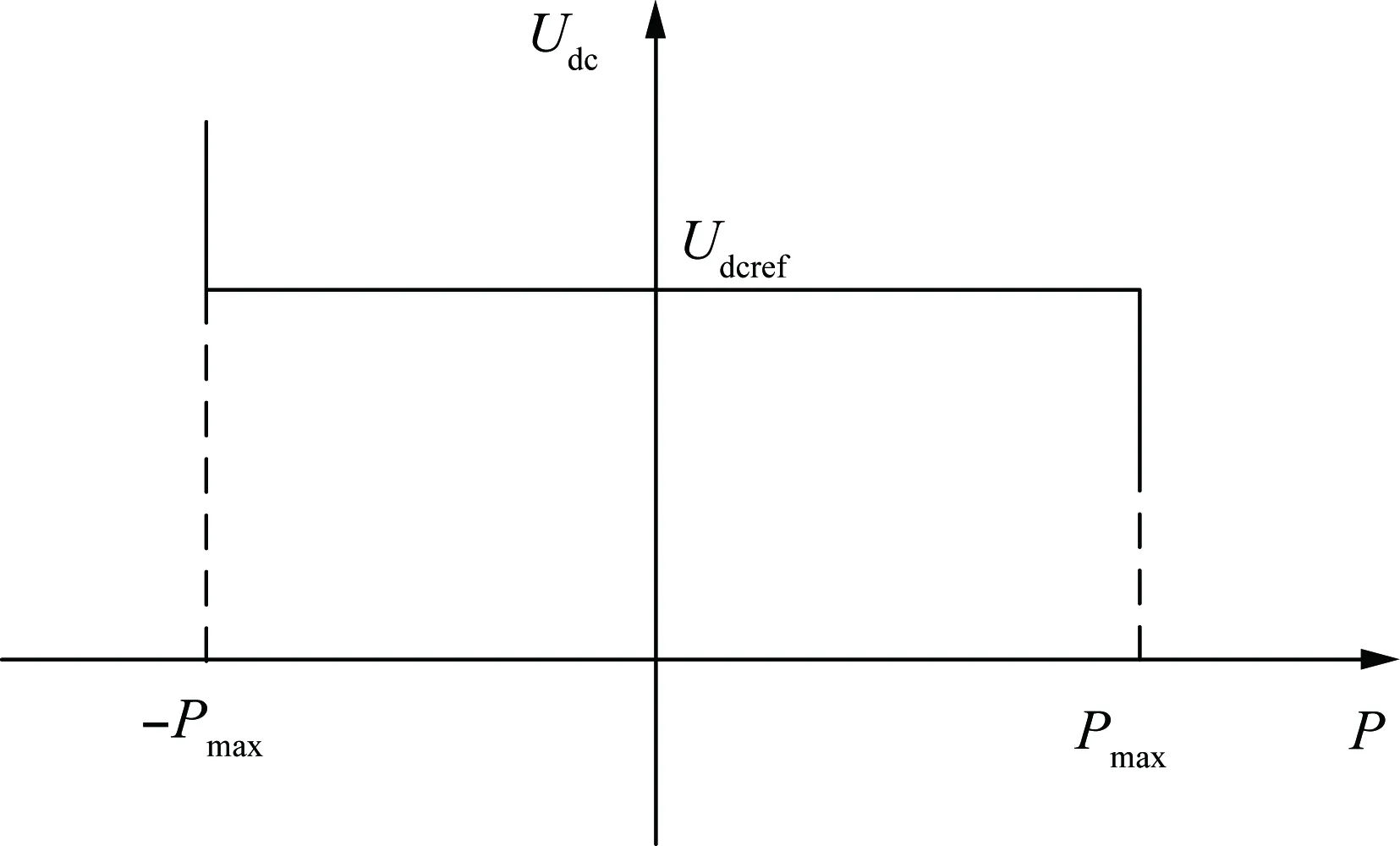
圖3 傳統的定直流電壓控制特性曲線Fig.3 Characteristic curve of traditional fixed DC voltage control
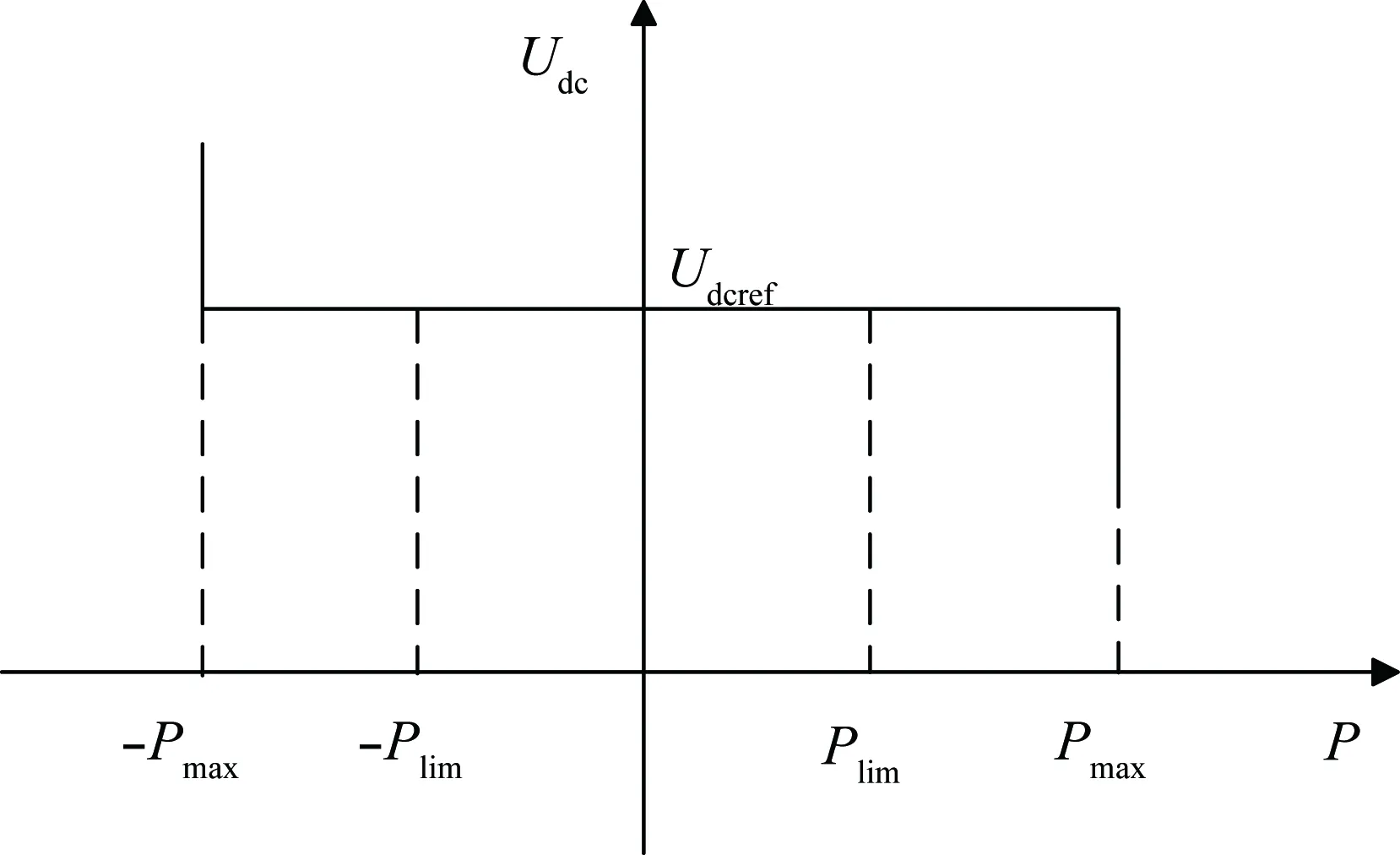
圖4 新型的定直流電壓控制特性曲線Fig.4 Characteristic curve of new fashioned fixed DC voltage control
2.2 換流站自適應下垂控制
在定斜率下垂控制策略下,采用直流電壓定斜率下垂控制的換流站具有承擔系統不平衡功率和穩定直流電壓的作用,其特性曲線如圖5所示[20-21],Udcmax、Udcmin分別為直流電壓允許波動范圍的上限和下限。當直流電壓發生變化時,換流站根據下垂特性調節輸出的有功功率,從而達到新的穩定運行點。
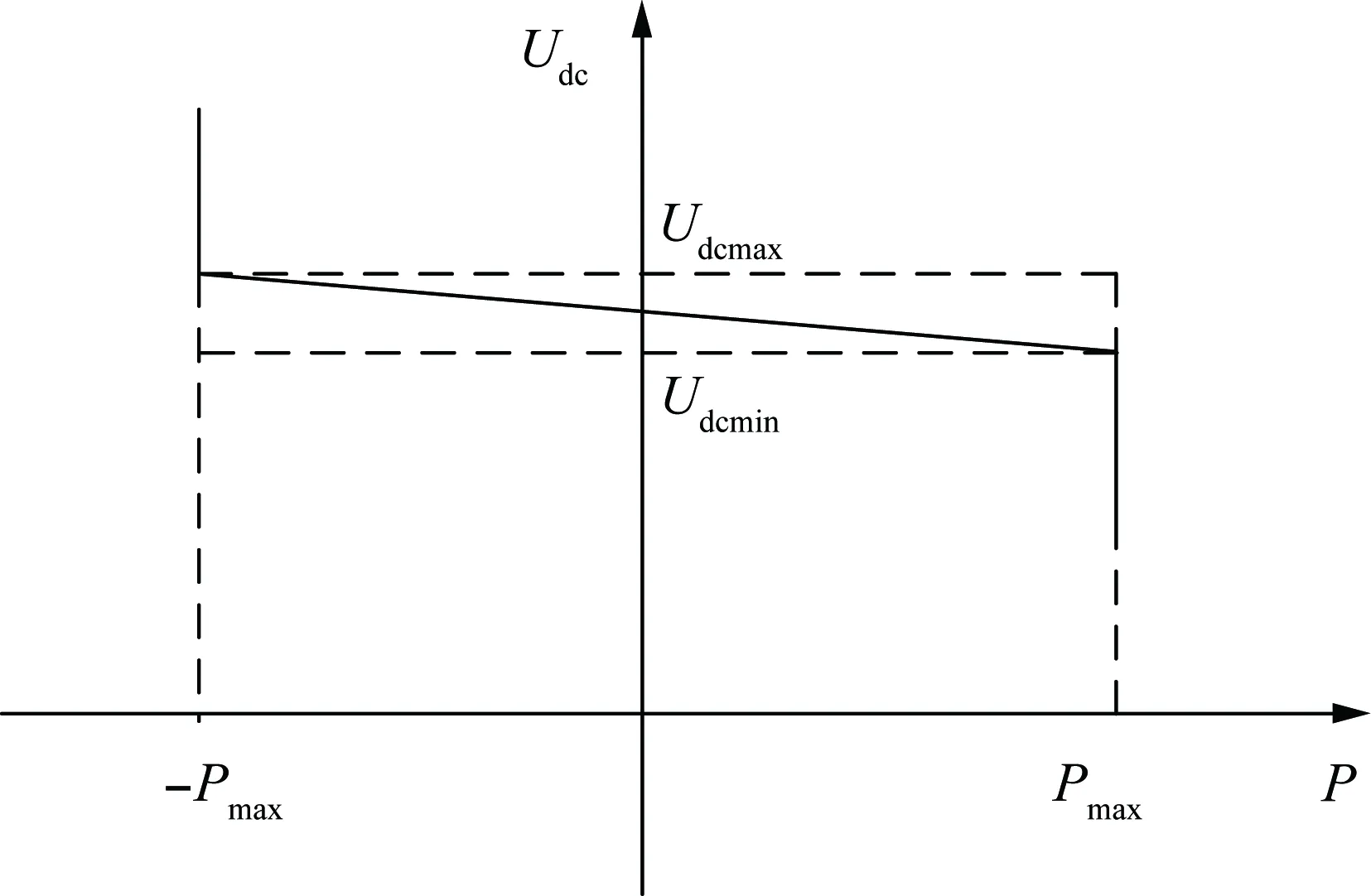
圖5 傳統的定斜率下垂控制特性曲線Fig.5 Characteristic curve of traditional fixed slope droop control
圖5中,換流站下垂系數K的表達式為
(3)
在自適應下垂控制策略下,定義換流站可用功率變化量的絕對值|Pcan|為換流站的功率裕度。以下推導過程中,將判別系統處于穩態時記為t-1時刻,對所有下標為t-1的變量重新賦值;將當前時刻記為t時刻,對所有下標為t的變量重新賦值。換流站可用功率變化量Pcan表達式為:
(4)
ΔUdc=Ut-Ut-1
(5)
式中:Ut為t時刻換流站直流側電壓;Ut-1為t-1時刻換流站直流側電壓。
Ucan為允許的直流電壓變化量,其表達式為
(6)
下垂系數K的表達式為
(7)
則換流站有功功率指令值變化量ΔP的表達式為
(8)

(9)
為了防止換流站有功功率指令值頻繁調整,在直流電壓變化量ΔUdc上引入滯環控制,環寬為2Udm。電壓偏差在環寬以內,則ΔP為0,即換流站有功功率指令值保持不變。
(10)
新型的自適應下垂控制示意曲線如圖6所示。假設換流站某一時刻的運行狀態處于A點,當直流電壓上升時,運行狀態由A點沿曲線1運行至B點;當直流電壓下降時,運行狀態由B點沿曲線2運行至C點;當直流電壓再次上升時,運行狀態由C點沿曲線3運行至D點。可以看出,當直流電壓變化時,自適應下垂控制以當前時刻換流站的運行狀態為基準,以直流電壓允許波動極限值和換流站的額定功率為限制條件,制定相應的調節關系曲線。當某一時刻換流站的運行狀態由A點轉換至A*點時,自適應下垂控制可以依據A*點的運行狀態重新制定調節關系曲線。

圖6 新型的自適應下垂控制示意曲線Fig.6 Schematic curve of new fashioned adaptive droop control
2.3 附加直流電壓極限值調節
由于新能源并網時的電壓等級一般較低,線路電阻較大,容易導致多個換流站間直流電壓存在較大誤差,當某一換流站直流電壓達到允許波動的極限時其余換流站仍具備較大可用功率容量。為了解決上述問題,可以通過采集每一換流站的直流電壓數據,調節各個換流站允許直流電壓的波動極限值,以實現當某一換流站滿載時,其余換流站也同時達到滿載狀態,充分利用換流站的有功功率容量,同時將直流電壓限制在允許范圍內。
假設某時刻系統中直流電壓最高的換流站為VSC2,直流電壓最低的換流站為VSC3,Udci(i=2,3,…,m)為換流站的實際直流電壓,則VSCi(i=2,3,…,m)允許波動范圍的上限和下限值Udcmaxi、Udcmini應修改為
(11)
將修改后的Udcmaxi、Udcmini作為VSCi的直流電壓允許波動極限值,即各換流站的直流電壓允許波動極限值根據系統的實際運行狀態實時修改,可以實現當某一換流站直流電壓達到極限時所有采用自適應下垂控制的換流站均達到滿載,充分利用了換流站的可用功率容量,提高系統的穩壓能力。此外,直流電壓極限值調節只是修改本地換流站設定的允許波動極限值,對換流站的穩態運行并無影響,直流電壓極限值調節不會導致換流站的實際有功功率發生變化,避免了有功功率的頻繁調整。
新型的直流電壓極限值調節示意曲線如圖7所示。假設直流電壓最高與最低的換流站分別為VSC2與VSC3,對應的運行狀態分別處于A、B兩點,由于VSC2、VSC3的直流電壓存在一定的誤差,故進行功率調節時通過修改本地換流站的電壓極限值制定調節關系曲線。由于2個換流站的直流電壓存在誤差,由式(11)修改VSC2的直流電壓下限值和VSC3的直流電壓上限值,使得當直流電壓降低時,VSC2運行狀態由A點沿曲線1運行。VSC3運行狀態由B點沿曲線2運行,VSC3的直流電壓達到允許波動的極限時,VSC3達到滿載,此時VSC2同時滿載;當直流電壓上升時,VSC2和VSC3分別由A、B兩點沿曲線3、4同時達到滿載。通過直流電壓極限值調節,在極端情況下仍可實現2個換流站同時滿載,并同時將直流電壓限制在允許范圍內,充分利用了換流站的有功功率容量,增強了系統的穩壓能力。
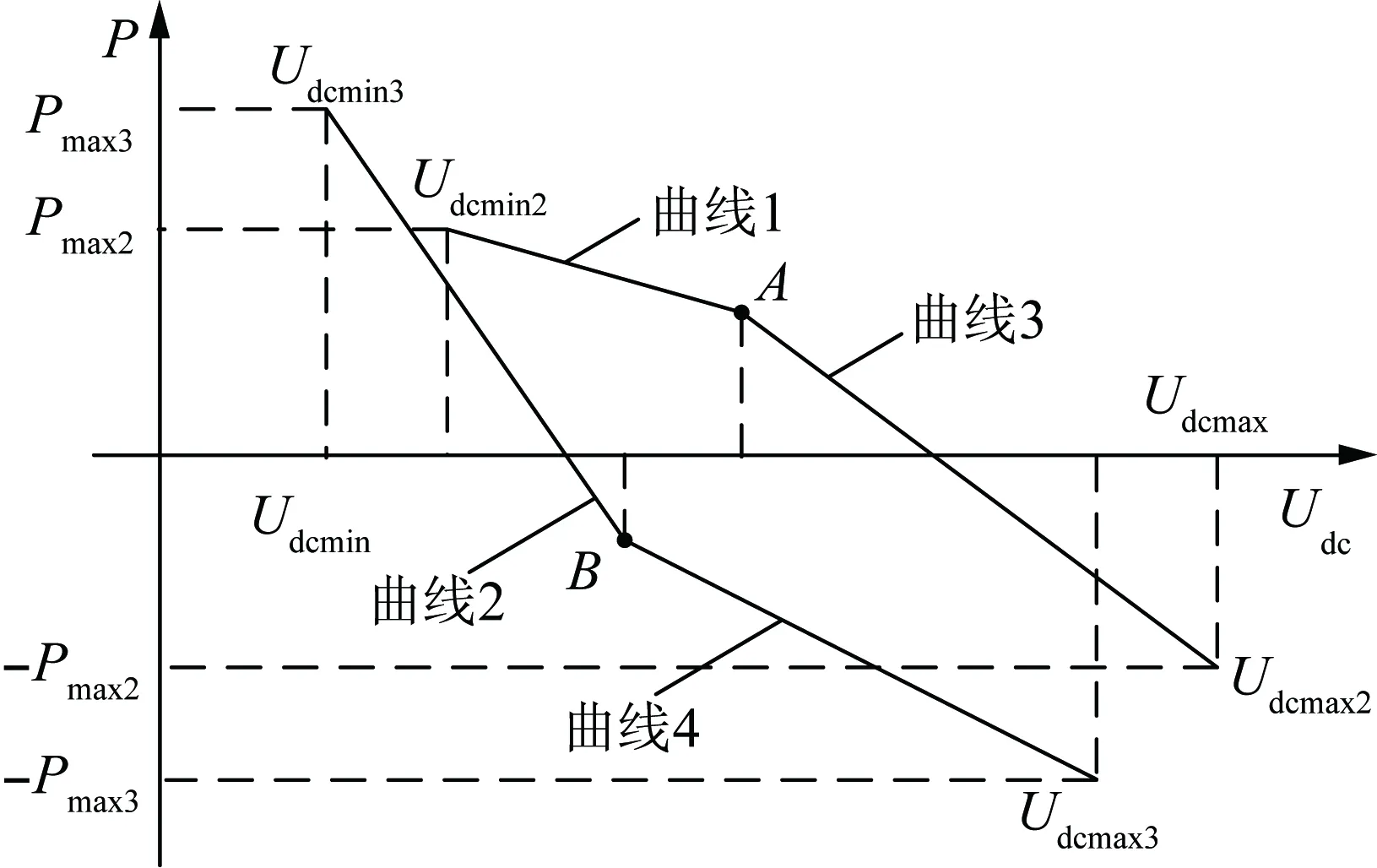
圖7 新型的直流電壓極限值調節示意曲線Fig.7 Schematic curve of new fashioned DC voltage limit value regulation
由上述分析可知,所提控制策略通過多個換流站分擔采用定直流電壓控制的主換流站有功功率的方式,使主換流站不易滿載,尤其適用于新能源出力頻繁波動的情況;當主換流站滿載或退出運行時,不平衡功率依據采用自適應下垂控制換流站的功率裕度靈活分配;調節過程中下垂系數為定值,使調節更為簡單、穩定;引入直流電壓極限值調節可以實現當直流電壓達到允許的波動極限時,所有采用自適應下垂控制的換流站幾乎同時達到滿載,降低了新能源并網時出力的隨機性與間歇性導致的多個換流站間直流電壓的誤差對功率調節的影響,可以最大限度地利用換流站的有功功率容量,維持直流電壓穩定。
3 仿真結果分析
為驗證本文所提控制策略的可行性和有效性,基于PSCAD/EMTDC搭建了如圖1所示的五端柔性直流輸電系統仿真模型。VSC1采用定直流電壓控制,VSC2與VSC3采用直流電壓下垂控制,VSC4與VSC5采用定有功功率控制。選取有功功率增大、主換流站退出運行以及使采用下垂控制的換流站滿載3種工況進行仿真驗證,并將新型的控制策略(如圖4、6、7所示)與傳統的控制策略(如圖3、5所示)進行了對比分析,系統主要仿真參數見表1。
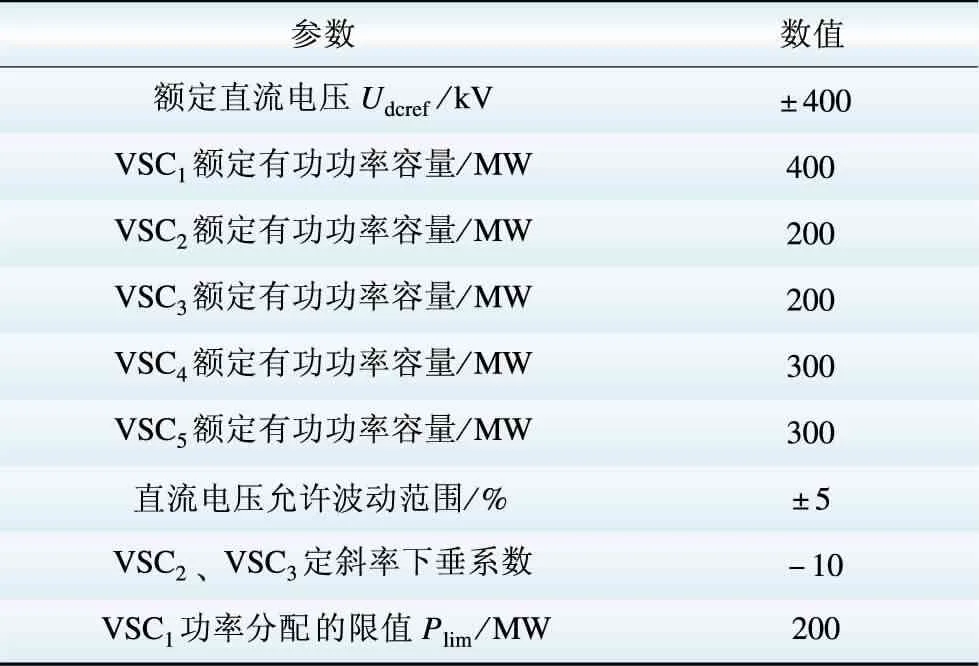
表1 系統主要仿真參數Table 1 Main simulation parameters of the system
3.1 算例1:有功功率增大
初始狀態下,直流電壓指令值為400 kV,VSC2和VSC3的有功功率指令值分別為100 MW和-200 MW,VSC4和VSC5的有功功率指令值分別為100 MW和-100 MW。由于新能源出力的不確定性,t=2 s時,VSC4的有功功率指令值變為-50 MW,VSC5的有功功率指令值變為-150 MW;t=4 s時,VSC4的有功功率指令值變為-200 MW,VSC5的有功功率指令值變為-250 MW。新型的控制策略和傳統的定斜率下垂控制策略下的仿真結果如圖8所示。
由圖8可知,t=2 s時VSC4和VSC5輸出的有功功率減小后,系統中出現了-200 MW的不平衡功率。由于VSC1采用定直流電壓控制,不平衡功率在VSC1調節范圍內,故-200 MW的不平衡功率由VSC1獨自承擔。在新型的控制策略下,VSC1有功功率變為300 MW,此時P1>Plim,故根據式(2)令VSC1有功功率的Plim部分由VSC2與VSC3承擔,同時將VSC2與VSC3之前承擔的有功功率與Plim之和按照VSC2與VSC3的有功功率容量重新分配,避免換流站滿載。通信所需時間設定為0.2 s 。
t=4 s時,VSC4和VSC5輸出的有功功率減小后,系統中出現了-250 MW的不平衡功率,在傳統的定斜率控制策略下,VSC1因達到滿載失去有功功率調節能力,切換至定有功功率運行,其余不平衡功率由VSC2與VSC3承擔,直流電壓偏離400 kV。在新型的控制策略下,由于VSC2和VSC3可以在主換流站VSC1功率裕度較小時及時分擔VSC1的有功功率,故VSC1仍具備調節能力,處于定直流電壓控制模式以應對系統中新能源出力的頻繁變化,直流電壓穩定在400 kV左右,與傳統的控制策略相比,提高了電壓質量。
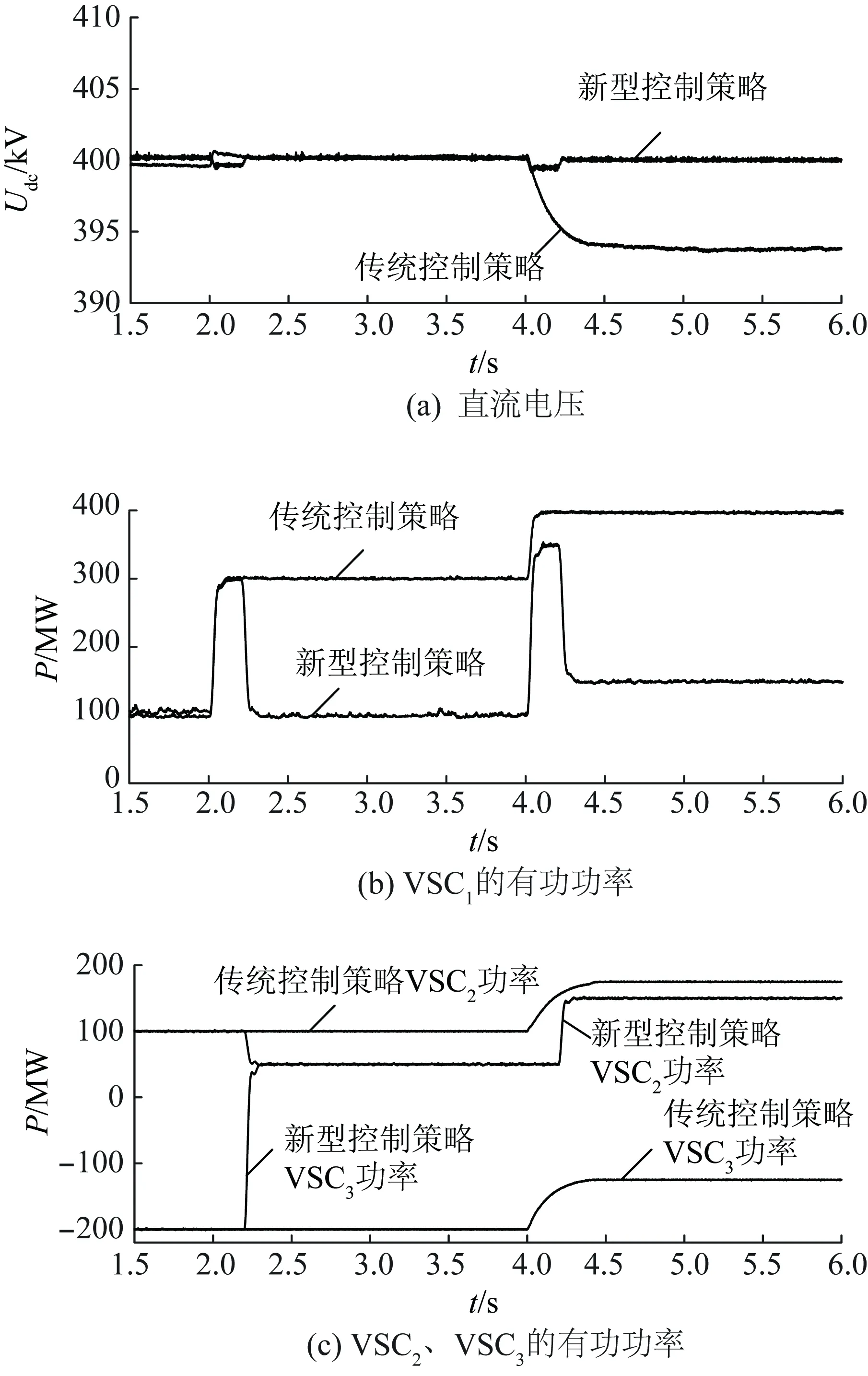
圖8 有功功率增大時仿真波形Fig.8 Simulation waveforms of active power increase
3.2 算例2:主換流站退出運行
任何VSC-MTDC系統都要滿足N-1原則,即任一換流站退出都不會影響系統的穩定運行。考慮最嚴重的一種情況,即主換流站VSC1退出運行。初始狀態下,直流電壓指令值為400 kV,VSC2和VSC3的有功功率指令值分別為50 MW和150 MW,VSC4和VSC5的有功功率指令值分別為100 MW和-200 MW。t=2 s時,VSC1退出運行;t=4 s時,VSC4的有功功率指令值變為-100 MW,VSC5的有功功率指令值變為-250 MW。新型的控制策略和傳統的定斜率下垂控制策略下的仿真結果如圖9所示。

圖9 主換流站退出運行時仿真波形Fig.9 Simulation waveforms when main converter station exits
由圖9可知,t=2 s時,VSC1退出運行后,直流電壓升高,VSC2與VSC3根據變化后的直流電壓調節輸出的有功功率,使系統重新達到平衡。t=4 s時,VSC4和VSC5輸出的有功功率減小后,直流電壓下降。在傳統的定斜率下垂控制策略下,VSC3在調節過程未結束便達到滿載,其余不平衡功率由VSC2獨自承擔。在新型的控制策略下,不平衡功率根據換流站的功率裕度靈活分配,VSC2與VSC3均未達到滿載。由圖8可見,主換流站退出不會影響到系統的穩定運行。
3.3 算例3:采用下垂控制的換流站滿載
初始狀態下,VSC2直流電壓指令值為400 kV,VSC3直流電壓指令值為396 kV,2個換流站間直流電壓相差0.01Udcref,VSC2和VSC3的有功功率指令值分別為-50 MW和50 MW,VSC4和VSC5的有功功率指令值分別為-100 MW和-50 MW。t=2 s時,VSC1退出運行;t=4 s時,VSC4的有功功率指令值變為-250 MW,VSC5的有功功率指令值變為-150 MW。新型的控制策略和傳統的定斜率下垂控制策略下的仿真結果如圖10所示。
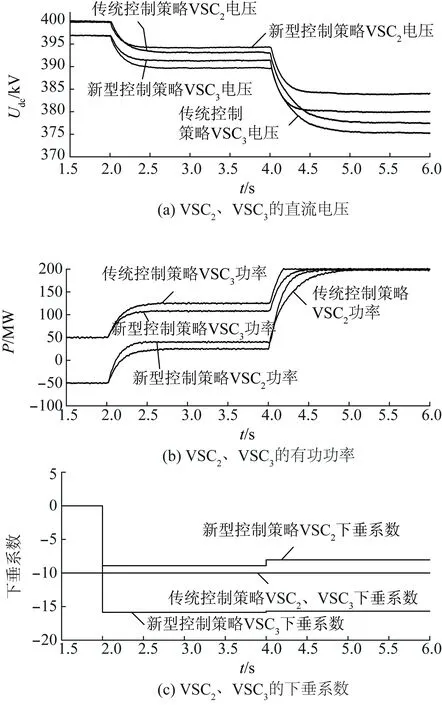
圖10 采用下垂控制的換流站滿載時仿真波形Fig.10 Simulation waveforms when full load in converter station with droop control
由圖10可知,t=3 s時,VSC1退出運行后,直流電壓降低。VSC2與VSC3分擔這部分功率,使系統重新達到穩態。t=4 s時,VSC4和VSC5輸出的有功功率減小后,直流電壓再次降低。在傳統的定斜率下垂控制策略下,VSC3在調節過程未結束便達到滿載,其余不平衡功率由VSC2獨自承擔,導致VSC2與VSC3的直流電壓越限。在新型的控制策略下,由于引入了直流電壓極限值調節,VSC2與VSC3幾乎同時達到滿載,且直流電壓均在允許范圍內,降低了換流站間直流電壓誤差對功率調節的影響,充分利用了換流站的有功功率容量。
4 結 論
針對新能源并網時VSC-MTDC系統中各換流站之間功率協調控制的問題,本文將主從控制與下垂控制相結合,提出一種適用于新能源并網的VSC-MTDC系統協調控制策略,并得到以下結論:
(1)為應對新能源并網時出力的頻繁性與間歇性變化,通過多個換流站分擔采用定直流電壓的主換流站有功功率的方式,使主換流站不易滿載,從而維持系統的功率平衡與直流電壓穩定。
(2)當主換流站滿載或退出運行時,不平衡功率可以根據采用自適應下垂控制換流站的功率裕度進行靈活分配;調節過程中下垂系數為定值,使調節更為簡單、穩定。
(3)為解決新能源并網時出力的間歇性變化導致多個換流站間的直流電壓誤差對功率調節的影響,通過調節各換流站的直流電壓極限值,使得當某一換流站的直流電壓達到允許的波動極限時,所有采用自適應下垂控制的換流站幾乎同時達到滿載,以最大限度地利用換流站的有功功率容量,維持直流電壓穩定。
(4)所提控制策略與主從控制相比,降低了對于通信的要求,避免了通信延遲或中斷時換流站控制模式切換過程中可能引起的失穩問題。與下垂控制相比,通過采用定直流電壓的主換流站使直流電壓維持在額定值附近,提高了電壓質量;通過附加直流電壓極限值調節,可以減小多個換流站間的直流電壓誤差對功率調節的影響。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45