虛擬機構創新設計實驗平臺的研究與實現
2018-11-01 05:23:50張小粉
機械設計與制造工程 2018年10期
淮 妮,金 瑩,張小粉
(咸陽職業技術學院機電學院,陜西 咸陽 712000)
隨著計算機技術的發展,機械創新設計已經在傳統經驗性創新的基礎上逐步轉向為計算機輔助機械創新設計。而機構是機械產品的骨架,機構創新設計是機械產品創新設計的基礎。計算機輔助機構創新設計可以幫助機械設計人員快速地完成設計任務,并通過可視化顯示,直觀地分析機構設計方案[1]。另外,建立一個機械創新設計實驗室需50萬元以上的資金,對于多數高職院校比較困難,而虛擬機構創新設計實驗平臺其功能與物理實驗室一樣,卻只需幾千元資金。因此,研究虛擬機構創新設計實驗平臺,首先可以豐富高職院校“機械設計基礎”課程的實驗資源,提高學生的機械創新設計能力;其次,方便企業機械設計人員整體、全面地分析機構創新設計的方案,從而進一步提高機構創新的水平。
1 計算機編碼表示法
計算機輔助機構創新設計的關鍵技術是為機構知識尋找計算機能夠識別的數學模型[2]。計算機編碼方法是通過對機構的運動行為、機構的運動轉換功能屬性建立一套關鍵字定義規則,然后對其主關鍵字進行計算機編碼,從而實現機構特征的形式化表達。
1.1 機構運動行為四位編碼
機構的運動行為一般指運動類型、運動的連續性、運動速率、運動方向4項基本特性。對機構運動行為可以用四位編碼來表示(位次與相應運動屬性必須對應),見表1。
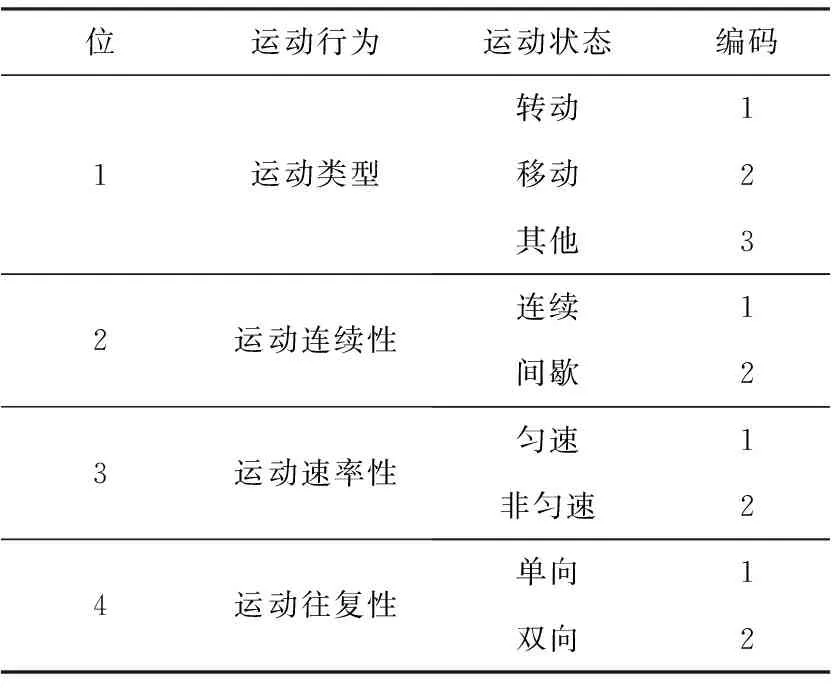
表1 機構運動行為的四位編碼
1.2 基本機構運動轉換功能屬性編碼
運動行為既可以是輸入運動,也可以是輸出運動,由輸入和輸出運動行為組成了基本機構的運動轉換功能屬性,因此對輸入和輸出運動行為的四位編碼就是對基本機構的運動轉換功能屬性的表達,見表2(四位編碼位次必須和表1一致,不可打亂)。
2 軟件系統架構
該系統軟件是通過輸入程式化的任務需求,對數據庫進行搜索匹配,得到符合要求的機構解并可視化演示,虛擬平臺軟件系統架構如圖1所示[3]。
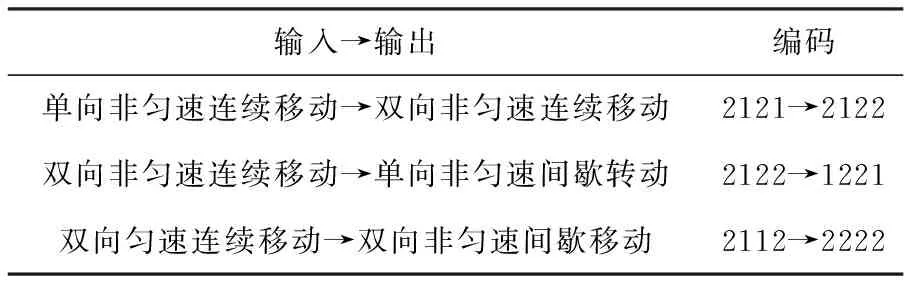
表2 機構運動轉換功能屬性編碼
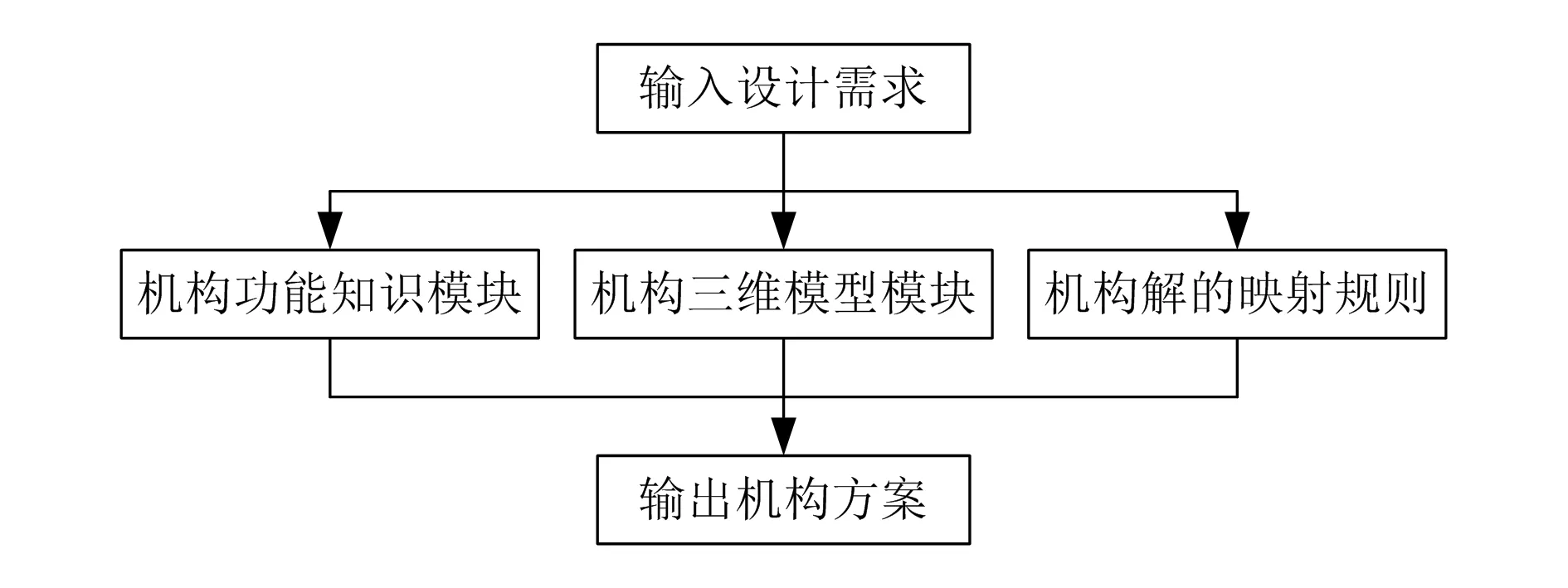
圖1 虛擬平臺軟件系統架構圖
各結構模塊承擔的任務分別為:1) 輸入設計需求,輸入給定設計任務的程式化符號;2) 機構功能知識模塊,即建立的機構功能知識數據庫,供系統搜索匹配四位編碼;3) 機構三維模型模塊,即建立的機構三維模型庫,供系統可視化顯示;4)機構解的映射方法,即搜索和匹配機構功能知識數據庫的規則,通過此規則可實現機構功能到機構解的映射;5) 輸出機構方案,將滿足需求的機構方案以文字和可視化方式輸出。
3 數據庫的建立
根據設計需求得到相應的機構解的過程實際是對數據庫搜索和匹配的過程,因此需要建立相應的機構知識數據庫[4-5]。根據系統結構,需要建立兩個數據庫:1)機構知識數據庫,包括兩個表。①基本機構運動行為表,具體包括4個字段,即運動的類型、連續性、速率性、往復性;②機構功能屬性表,具體包括12個字段,即機構序號、機構模塊名稱、輸入屬性四位編碼、輸入屬性1~4、輸出屬性四位編碼、輸出屬性1~4。該數據庫建立了常見基本機構的功能信息。2)機構三維模型庫,具體包括3個字段,即機構序號、機構模塊名稱、三維模型存儲地址,該數據庫建立了常見基本機構的三維模型。
4 機構解的映射方法
根據以上創建的數據庫,只需要建立一套對數據庫搜索、匹配的方法,則可實現從機構功能到機構解的映射[6-7]。具體方法如下。
4.1 直接匹配
例如,要實現“單向勻速連續轉動→單向勻速連續移動”的運動功能轉換,可直接搜索相應的輸入編碼1111、輸出編碼2111,得到的部分單一機構解見表3。
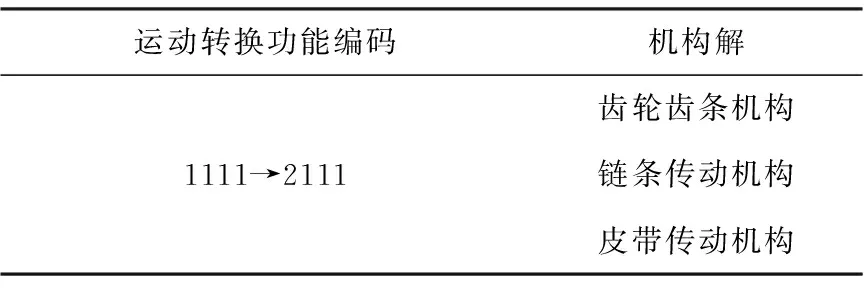
表3 1111→2111運動轉換部分單一機構解
4.2 拆分匹配
例如,要實現“單向勻速連續轉動→往復間歇移動”的運動功能轉換,搜索相應的輸入/輸出四位編碼為“1111→2222”,沒有得到相應的單一機構解,則需要進行拆分匹配。首先搜索輸入為1111的基本機構,得到的部分機構解見表4。其次搜索輸出為2222的基本機構,得到的部分機構解見表5。最后將表4輸出編碼和表5的輸入編碼進行對照,查看是否存在相同的編碼,有則表示有解。如表4與表5可得到“1111→1222+1222→2222”和“1111→2112+2112→2222”兩組解,即將曲柄滑塊機構的輸出端與凸輪滑塊擺桿機構的輸入端進行串聯組合成新的機構,將凸輪擺桿機構的輸出端與擺桿滑塊機構的輸入端進行串聯組合成新的機構。
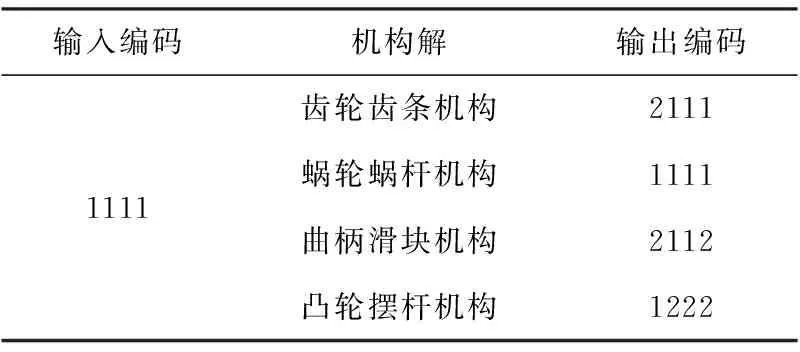
表4 輸入為1111的部分機構解
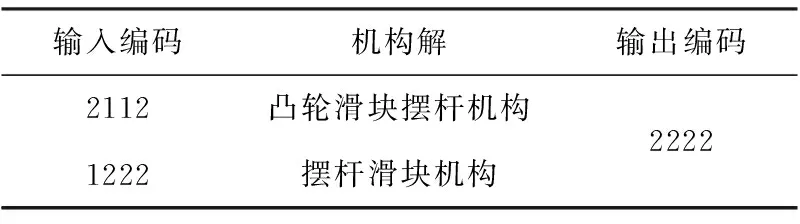
表5 輸出為2222的部分機構解
5 應用實例
本文以.NET 為工具開發了虛擬機構創新設計實驗平臺系統軟件[8]。以某一任務需求為例操作系統軟件。
任務需求:設計一個薄膜包裝設備的機械臂。電動機直接驅動,通過一些機械傳動裝置后,使機械臂做非勻速的上下往復運動,無其他特殊要求。第一級動力傳遞用萬向連軸器,要設計的部分是連軸器到機械臂的機械裝置,設計任務經抽象化后為:將“連續單向的勻速轉動”轉換為“連續雙向的非勻速移動”。
具體過程如下:
1)分析任務需求。運動轉換為“連續、單向、勻速轉動→連續、雙向、非勻速移動”,四位編碼為“1111→2122”;2)運行系統軟件,選擇輸入形式1111、輸出形式2122;3)點擊 “單一機構”按鈕,系統自動搜索機構知識數據庫,直接匹配對應的輸入輸出編碼,得到的單一機構解如圖2所示,若選中曲柄滑塊機構,再點擊“立體模型”按鈕,則系統自動搜索機構三維模型庫,即可直接打開曲柄滑塊機構的三維模型,如圖3所示;4) 點擊 “組合機構”按鈕,系統自動搜索機構知識數據庫,拆分匹配對應的輸入和輸出編碼,得到的組合機構解如圖4所示,若選中齒輪曲柄滑塊串聯組合機構,再點擊“立體模型”按鈕,則系統分別搜索齒輪機構和曲柄滑塊機構的三維模型,并利用三維軟件的自動裝配功能將得到的單一機構三維模型進行虛擬裝配,即可看到齒輪曲柄滑塊串聯組合機構的三維模型,如圖5所示。
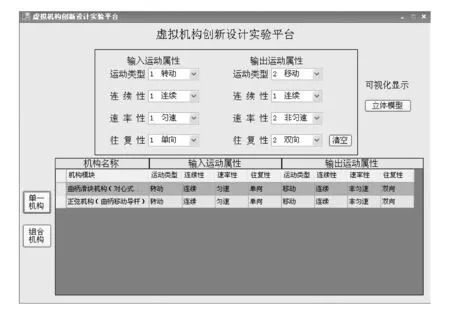
圖2 單一機構解
按照以上設計需求操作實驗平臺系統軟件后,得到的機構解共有5個,其中2個單一機構、3個串聯組合創新機構。后期使用過程中,學生可通過旋轉三維模型,直觀地了解每個機構的結構特點;對于機械設計人員,可對5個機構直觀地進行分析對比,擇優選用。

圖3 單一機構三維模型
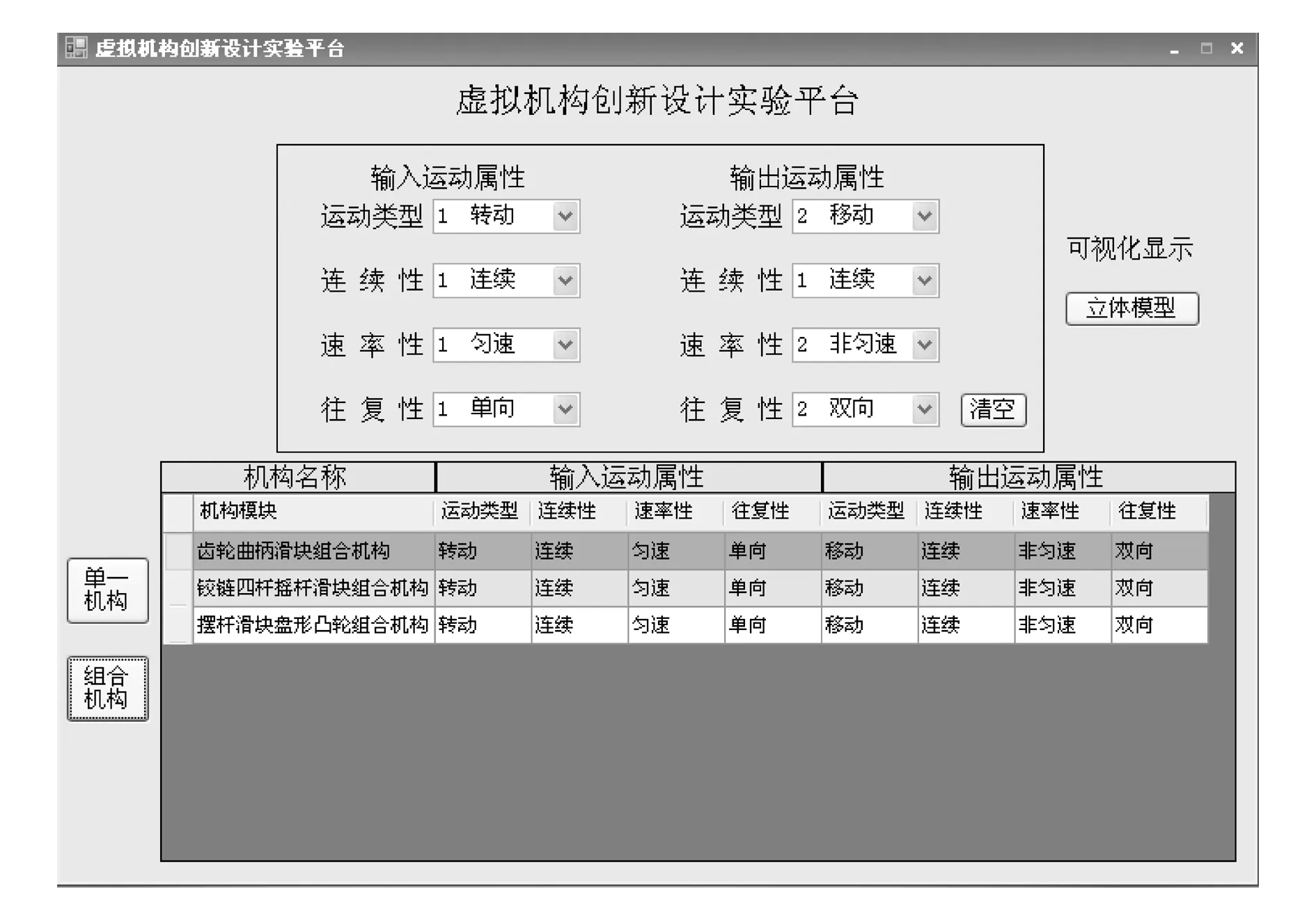
圖4 組合機構解
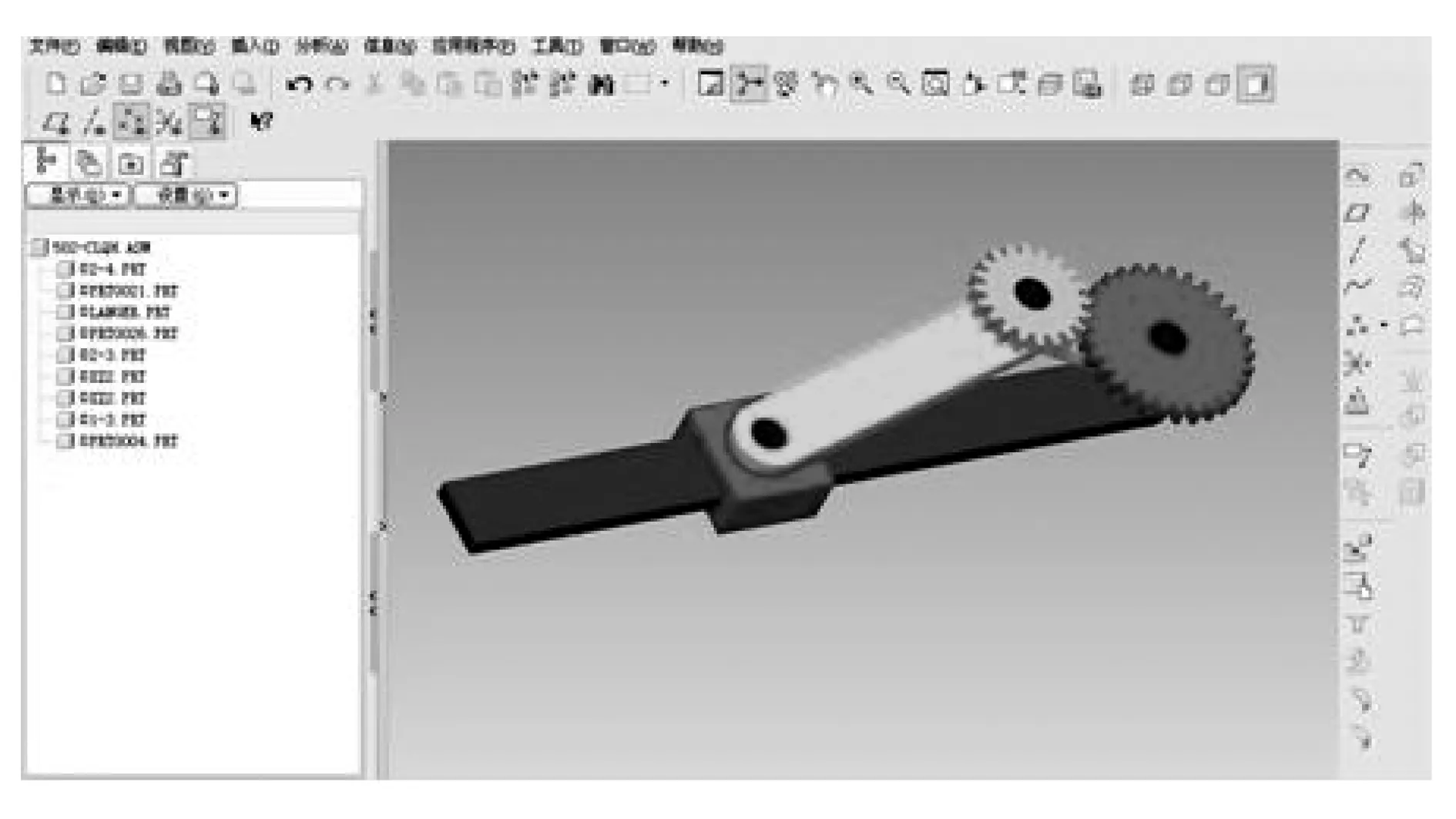
圖5 組合機構三維模型
6 結束語
本文用計算機編碼的方法建立了機構知識數學模型,提出了一種拆分后搜索匹配的機構功能到機構解的映射方法,以.NET為工具開發了系統軟件,并按照一定的設計需求,實際操作軟件系統后得到3個組合創新機構,成功驗證了虛擬機構創新設計實驗平臺的可行性。但是該系統只分析了串聯組合機構,沒有對并聯、疊加等復雜機構進行分析,只實現了虛擬機構創新設計的初級階段,后續需不斷完善,使其能得到更豐富的機構創新設計方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
財經(2017年2期)2017-03-10 14:35:35
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
財經(2016年15期)2016-06-03 07:38:02
財經(2016年3期)2016-03-07 07:44:46