基于尾渦強(qiáng)度的無人機(jī)與民機(jī)縱向安全間隔評估研究*
2018-11-01 07:37:54楊新湦
中國安全生產(chǎn)科學(xué)技術(shù) 2018年10期
楊新湦,任 治
(中國民航大學(xué) 空中交通管理學(xué)院,天津 300300)
0 引言
無人機(jī)(Unmanned Aerial Vehicle, UAV)技術(shù)的快速發(fā)展與廣泛應(yīng)用在全球掀起了一股熱潮,但近期無人機(jī)入侵機(jī)場凈空、威脅民航客機(jī)安全等“黑飛”事件讓無人機(jī)的科學(xué)管控成為民航安全運(yùn)行領(lǐng)域亟待解決的難題。從安全科學(xué)角度看,無人機(jī)在非隔離空域與民航客機(jī)應(yīng)該保持多少安全距離(即安全間隔)是首要、核心的問題,該間隔的評估問題也是監(jiān)管機(jī)構(gòu)與無人機(jī)使用者關(guān)注的焦點(diǎn)。民機(jī)飛行過程產(chǎn)生的尾渦(Wake Vortex)會導(dǎo)致尾隨運(yùn)行的其他航空器發(fā)生失速、滾轉(zhuǎn)等不穩(wěn)定現(xiàn)象,而無人機(jī)體型小、重量輕,一旦闖入尾渦流場,在誘導(dǎo)速度影響下失控后將發(fā)生解體,運(yùn)動的機(jī)體碎片在尾渦場中極易被吸入發(fā)動機(jī)或與民機(jī)發(fā)生碰撞,嚴(yán)重危及航行安全。因此,考慮尾渦運(yùn)動理論,建立無人機(jī)與民機(jī)安全間隔評估的有效模型是有必要的。
目前,國內(nèi)外對于無人機(jī)安全間隔的評估研究還處于概念階段,尚未形成成熟的評估理論和方法。在民航領(lǐng)域,安全間隔評估始于20世紀(jì)60年代的Reich模型[1],2008年徐肖豪等[2]首次系統(tǒng)地對國內(nèi)外主要的碰撞風(fēng)險模型進(jìn)行比較,分析出飛行間隔安全性評估的關(guān)鍵問題是模型限制、管制意圖和安全評價,認(rèn)為隨著通信、導(dǎo)航及監(jiān)視(Communication Navigation and Surveillance, CNS)性能的完善, 未來間隔評估研究的趨勢是基于CNS性能建立碰撞風(fēng)險模型。近年來,隨著各類航行新概念的提出,特別是基于性能導(dǎo)航(Performance Based Navigation, PBN)和4D航跡方面相關(guān)研究的突破,使得安全間隔研究涌現(xiàn)出很多新的成果:張兆寧等[3]在Reich模型基礎(chǔ)上,考慮CNS性能推導(dǎo)出平行航路縱向重疊概率的計(jì)算公式,建立了CNS性能平行航路縱向間隔評估模型;黃寶軍[4]在傳統(tǒng)碰撞風(fēng)險模型中引入CNS性能和管制認(rèn)知過程,認(rèn)為CNS性能中導(dǎo)航性能對位置誤差影響最大;張兆寧等[5]將CNS性能誤差用概率表示為以理論位置向外輻射,提出CNS性能誤差具有高斯白噪聲特性;翟文鵬等[6]采用飛行流模擬的方法,對ADS-B監(jiān)視技術(shù)下的PBN平行航路進(jìn)行安全間隔評估,實(shí)現(xiàn)了飛行流整體運(yùn)行下的航路安全風(fēng)險評估。在尾流及尾渦研究方面,F(xiàn)rench[7]對后機(jī)在前機(jī)尾渦流場內(nèi),誘導(dǎo)下洗速度作用下的滾轉(zhuǎn)、傾斜、失速現(xiàn)象進(jìn)行了研究;Sarpkaya[8]提出采用渦消散率(eddy dissipation rate)代替湍動能(turbulent kinetic energy)來描述尾渦的消散,以研究尾渦強(qiáng)度與其消散規(guī)律;魏志強(qiáng)等[9]采用鏡像渦模擬尾渦,研究尾渦地面效應(yīng)與消散機(jī)理,并將模擬結(jié)果與大渦模擬及激光雷達(dá)實(shí)測數(shù)據(jù)進(jìn)行對比;周彬等[10]借助保守被動模型,基于升力線理論建立尾流快速建模方法,實(shí)現(xiàn)對不同時刻尾流影響區(qū)域的可視化仿真。
上述研究使得民航客機(jī)安全間隔理論日趨成熟,本文將結(jié)合民航客機(jī)與無人機(jī)各自的運(yùn)行特性,在民機(jī)CNS性能和無人機(jī)GPS運(yùn)行環(huán)境下,基于尾渦流場強(qiáng)度消散的Crow不穩(wěn)定性理論[11]改進(jìn)碰撞模型,針對民機(jī)起飛后初始爬升剖面的運(yùn)行實(shí)際,建立給定TLS下無人機(jī)尾隨民機(jī)運(yùn)動時所需的縱向安全間隔評估模型。為驗(yàn)證模型有效性,針對重、中、輕3類機(jī)型尾渦強(qiáng)度消散差異性,通過Matlab求解相應(yīng)縱向安全間隔值,計(jì)算結(jié)果經(jīng)分析后證明該模型具有較強(qiáng)的科學(xué)性和適用性。
1 民機(jī)尾渦流場消散模型
飛行過程中,上下翼面的壓力差不僅提供飛機(jī)所需的升力,還產(chǎn)生由下翼面繞過翼尖向上翼面流動的氣流,形成2個反向旋轉(zhuǎn)的翼尖渦,即尾渦,如圖1所示[12]。尾渦影響范圍和強(qiáng)度是安全間隔評估模型中改進(jìn)碰撞模板(collision slab)的重要依據(jù)。相較于航路巡航階段,進(jìn)離場和起降階段尾渦影響相對較大,同時由于飛行高度低,也是無人機(jī)與民機(jī)產(chǎn)生沖突最多、最危險的階段。尾渦流場的運(yùn)動與消散過程主要分為近場渦和遠(yuǎn)場渦2個主要階段,其消散率(eddy dissipation rate)符合Crow不穩(wěn)定性理論,近場渦是尾渦形成和演化階段,在其影響范圍內(nèi)流場強(qiáng)度變化速率較低,而遠(yuǎn)場渦消散快,流場強(qiáng)度隨時間推移迅速減弱。
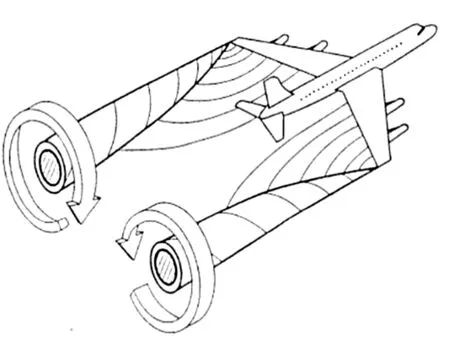
圖1 飛機(jī)尾渦的形成Fig.1 Sketch of aircraft wake vortex
Crow不穩(wěn)定性由Crow在1974年提出[13],該理論認(rèn)為尾渦消散的原因是強(qiáng)度相同的尾渦間的誘導(dǎo)作用導(dǎo)致在擴(kuò)散運(yùn)動中2個渦連接起來,形成1個新的尾渦流場。尾渦強(qiáng)度在連接之后迅速減小,且一定尺度的大氣湍流在尾渦縱向距離上所造成的不穩(wěn)定的波動加速了這種連接消散的形成。Crow不穩(wěn)定性雖未考慮地面效應(yīng)影響,但是本文研究的民機(jī)爬升階段地面效應(yīng)逐漸減弱,可不予考慮,因此,仍然選用該理論研究尾渦消散率。
由于近場渦階段尾渦下沉趨勢不明顯,且流場強(qiáng)度較大,該階段進(jìn)入尾跡區(qū)的無人機(jī)在尾渦影響下動能激增,位置與速度方向難以預(yù)測,極有可能射向民機(jī),造成難以預(yù)料的損失;而遠(yuǎn)場渦下沉趨勢明顯,無人機(jī)進(jìn)入該尾跡區(qū)后被迅速拋向地面,勢能減小,雖然也會失控,但是由于民機(jī)處于爬升階段,二者具有較大的相對速度和逐步拉大的垂直間隔,碰撞風(fēng)險顯著降低。因此,本文只考慮近場渦強(qiáng)度消散對安全間隔評估的影響。
1.1 近場渦消散模型
近場渦的消散過程中主要用渦環(huán)量(vortex circulation)來描述流場強(qiáng)度,此外,渦距s(vortex separation)、渦核半徑r(vortex core radius)也是描述尾渦的重要參數(shù)[14-15]。飛機(jī)的最大起飛重量、速度以及氣象等因素也會影響尾渦的形成與消散,式(1)為尾渦參數(shù)向量。進(jìn)離場階段尾渦的數(shù)據(jù)可以通過機(jī)場激光雷達(dá)實(shí)際測得,也可利用大渦模擬進(jìn)行仿真分析。在對數(shù)據(jù)精度要求不高的情況下,采用式(2)可以快速得到較為精確的渦環(huán)量估計(jì)值。
(1)
(2)
式中:λ為飛機(jī)翼展,m;MTOW為最大起飛重量,kg;g為重力加速度,m/s2;ρ為大氣密度,kg/m3;V為對應(yīng)MTOW下的最大飛行速度,m/s;Γ(t)為時刻t的渦環(huán)量,m2/s;Γ0為初始渦環(huán)量,m2/s;ω0為尾渦參考下沉速度,m/s;t0為尾渦基準(zhǔn)時間,s。
1.2 近場渦尾跡區(qū)域
近場渦強(qiáng)度變化較小,該階段渦環(huán)量僅下降10%左右,且上文已分析表明遠(yuǎn)場渦影響可不予考慮。可據(jù)此特性,利用式(2)近似表示出近場渦階段持續(xù)時間tc,如式(3)所示。該時段內(nèi)民機(jī)與渦核運(yùn)動的相對距離即可近似表示為近場渦尾跡影響區(qū)域Sw,如式(4)所示,v為民機(jī)與渦核相對速度。
(3)
Sw=vtc
(4)
若已知尾渦參數(shù)及民機(jī)飛行數(shù)據(jù),依式(4)快速確定近場渦尾跡影響區(qū)域Sw,該近似值將用于縱向間隔評估模型,對傳統(tǒng)Reich碰撞模板進(jìn)行改進(jìn)。
2 縱向間隔評估模型
航空器間需要保持的安全間隔通常分為縱向間隔、側(cè)向間隔和垂直間隔3種,其中縱向間隔根據(jù)航空器運(yùn)動方向可細(xì)分為對頭和尾隨2種情形。在民機(jī)起飛后初始爬升階段,發(fā)動機(jī)采用全發(fā)最大爬升推力離場,爬升梯度大,高度上升快,而無人機(jī)爬升能力有限,若無人機(jī)與其保持較大縱向間隔對頭運(yùn)行,可以通過爬升迅速增大垂直間隔解除沖突;若無人機(jī)尾隨民機(jī)運(yùn)行,則正好落入民機(jī)近場渦尾跡影響區(qū),經(jīng)流場能量傳遞后失去控制危及民機(jī)航行安全。因此,本文主要針對無人機(jī)尾隨民機(jī)情形下的縱向安全間隔建立評估模型。
2.1 改進(jìn)的Reich模型碰撞模板
碰撞模板的劃設(shè)是建立Reich碰撞風(fēng)險模型的前提,其原理是將2架沖突航空器的外部保護(hù)區(qū)構(gòu)型疊加到其中1架航空器上,從而將問題抽象為1架航空器作為質(zhì)點(diǎn)入侵運(yùn)動中的碰撞模板,以簡化碰撞風(fēng)險計(jì)算分析過程。傳統(tǒng)的Reich模型基于平行航路碰撞風(fēng)險,其碰撞模板是1個以2架沖突航空器機(jī)身長之和、翼展之和、機(jī)身高之和分別為長、寬、高的長方體,此外還衍生出圓柱體、球體等碰撞模板,用于交叉航路及VOR導(dǎo)航模式下的碰撞風(fēng)險模型。無人機(jī)尾隨民機(jī)情形可抽象為平行航路下的兩機(jī)縱向間隔評估,故選用長方體碰撞模板,同時考慮近場渦尾跡區(qū)影響,改進(jìn)Reich模型碰撞模板以便于建立間隔評估模型。
民機(jī)外部保護(hù)區(qū)構(gòu)型需要針對近場渦影響進(jìn)行改進(jìn),而近場渦的影響應(yīng)該從縱向、側(cè)向和垂直3個方向分別考慮,本文只建立縱向間隔模型,故只考慮近場渦尾跡區(qū)對縱向區(qū)域的影響,忽略渦核外擴(kuò)和下沉在側(cè)向和垂直方向的影響。圖2為尾渦影響區(qū)域俯視圖,Sw為1.2節(jié)計(jì)算得到的近場渦尾跡影響區(qū)域,為便于計(jì)算,近似以機(jī)翼中點(diǎn)所在徑向剖面為起始端,且該剖面距機(jī)頭約0.5倍的機(jī)身長(λx)。
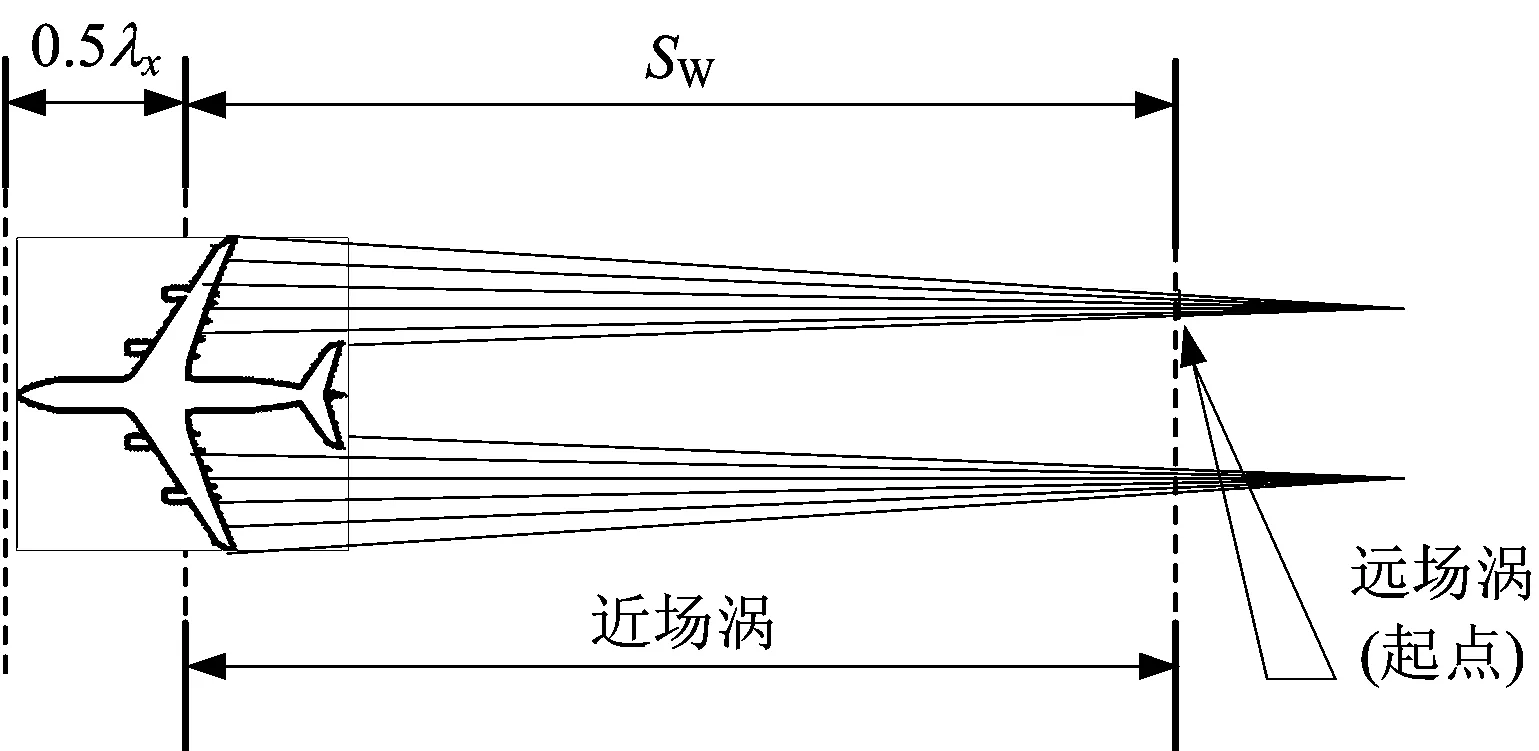
圖2 尾渦影響區(qū)域俯視圖Fig.2 Top view of wake vortex affected area
無人機(jī)外部保護(hù)區(qū)構(gòu)型較為簡單,常見多旋翼無人機(jī)外部構(gòu)型凸連線呈正方形或長方形,記其機(jī)身長和機(jī)身寬的最大值為λu。將民機(jī)與無人機(jī)外部保護(hù)區(qū)構(gòu)型疊加,得到改進(jìn)的Reich模型碰撞模板,其縱向幾何尺寸記為為Sx,見式(5):
Sx=0.5λx+Sw+λu
(5)
2.2 位置誤差影響下的縱向間隔評估模型
除了尾渦的影響,位置誤差的存也導(dǎo)致航空器運(yùn)行需要保持較大的安全間隔。民機(jī)位置誤差通常由通信、導(dǎo)航與監(jiān)視性能(Communication, Navigation and Surveillance, CNS)、航空氣象、飛行技術(shù)誤差(Flight Technical Error, FTE)等因素導(dǎo)致,在目前技術(shù)環(huán)境下,CNS性能對位置誤差的影響最大。無人機(jī)室外運(yùn)行主要依靠GPS導(dǎo)航,因此導(dǎo)航精度也是導(dǎo)致無人機(jī)產(chǎn)生位置誤差的重要因素,但是無人機(jī)導(dǎo)航系統(tǒng)抗干擾能力較弱,極易受地形、電磁、通訊鏈路等因素的影響,商業(yè)產(chǎn)品多采用RTK差分技術(shù),配合慣性導(dǎo)航、圖像定位以及離線訓(xùn)練提高其定位導(dǎo)航精度,因此,以GPS系統(tǒng)標(biāo)稱的定位精度進(jìn)行評估實(shí)際上得到的間隔值會偏小。研究表明,CNS性能與GPS系統(tǒng)的誤差均可利用正態(tài)分布來表示[16-20]。
無人機(jī)尾隨民機(jī)運(yùn)行過程中,兩機(jī)距離是分析其碰撞風(fēng)險的主要指標(biāo)。假定民機(jī)從機(jī)場起飛后,無人機(jī)尾隨民機(jī)飛行,在較短的時間間隔內(nèi),可近似看作處于同一高度,將縱向上民機(jī)位置誤差記為X1,無人機(jī)位置誤差記為X2;兩機(jī)初始縱向距離記為d,m;實(shí)際距離記為D,m,則有如下分布:

(6)
(7)
CNS性能導(dǎo)致的民機(jī)位置誤差的標(biāo)準(zhǔn)差σ1可表示為如下形式:
(8)
GPS系統(tǒng)導(dǎo)致的無人機(jī)標(biāo)稱位置誤差的標(biāo)準(zhǔn)差σ2可表示為如下形式:
(9)
式中:n1,n2,n3分別為民機(jī)RNP,RCP,RSP性能參數(shù);m為無人機(jī)GPS系統(tǒng)標(biāo)稱精度參數(shù);V為民機(jī)飛行速度,m/s。
若將無人機(jī)GPS系統(tǒng)修正標(biāo)準(zhǔn)差記為σxiu,則兩機(jī)初始距離為d時的碰撞風(fēng)險(Collision Risk,CR)可記為:
CR=2P(|D-d|≤Sx)=
(10)
給定安全目標(biāo)水平TLS可依式(10)得到需要保持的兩機(jī)初始距離,該距離稱為滿足相應(yīng)TLS水平下的縱向最小安全間隔dTLS。但是,直接給定TLS反解dTLS過程較為復(fù)雜,目前通用的解法是變換兩機(jī)初始距離,利用Matlab通過逐步搜索算法逼近TLS水平值。
3 評估分析算例
航空器類型、飛行速度等都會影響近場渦尾跡區(qū)的大小,進(jìn)而影響碰撞模板的大小。本文選取重、中、輕3類常見民機(jī)與四旋翼無人機(jī)作為算例評估對象,在不同的飛行速度以及導(dǎo)航設(shè)備性能環(huán)境下利用Matlab建立評估模型進(jìn)行求解。算例所需各項(xiàng)參數(shù)見表1。
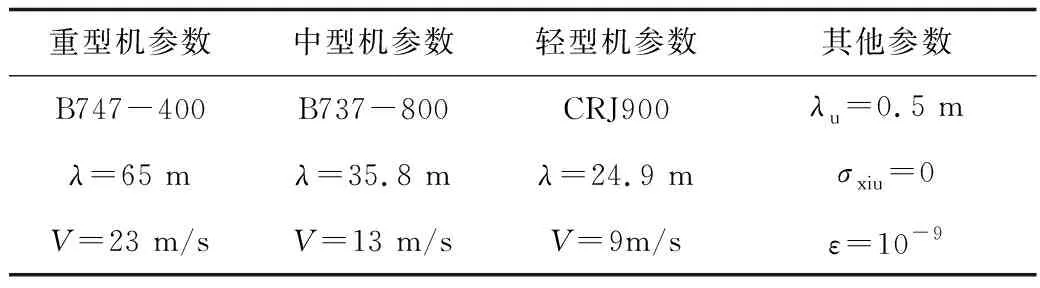
表1 算例參數(shù)Table 1 Parameters of the sample
評估得到的縱向間隔值除可用于非隔離空域內(nèi)無人機(jī)與民機(jī)混合運(yùn)行時的間隔保持參考外,還可為機(jī)場無人機(jī)禁飛電子圍欄的劃設(shè)提供理論支持。RNP1性能環(huán)境最接近機(jī)場周圍性能環(huán)境,為得到RNP1環(huán)境下安全間隔值浮動區(qū)間,由重中輕3種機(jī)型,飛行速度為180~220 kt,GPS20和GPS50 2種類型隨機(jī)組合100個計(jì)算方案,求解得到結(jié)果如圖3所示,可以發(fā)現(xiàn)安全間隔值在6.6~7.3 km之間浮動。該間隔區(qū)間可作為跑道端線凈空范圍劃設(shè)參考,現(xiàn)行機(jī)場凈空保護(hù)區(qū)由機(jī)場每一條跑道中心線10 km,跑道端線20 km的范圍構(gòu)成,若僅考慮CNS/GPS及尾渦流場影響,跑道端線凈空范圍可依據(jù)7.3 km實(shí)際影響區(qū)域進(jìn)行精細(xì)化劃設(shè)。
圖3 RNP1環(huán)境下隨機(jī)方案對比Fig.3 Contrast of 100 random scenarios on RNP1
3.1 導(dǎo)航性能對安全間隔的影響
本文涉及的導(dǎo)航性能由民機(jī)RNP與無人機(jī)GPS構(gòu)成。無人機(jī)導(dǎo)航精度GPS50,民機(jī)選用B737-800,速度200 kt時的算例顯示,RNP性能對安全間隔影響很大,RNP1性能環(huán)境下間隔約為6.803 km,RNP4為22.736 km,RNP10為55.623 km。隨著民機(jī)導(dǎo)航精度的下降,所需安全間隔不斷增大,變化趨勢如圖4所示,而無人機(jī)GPS對安全間隔影響較小,B737-800/RNP4/200 kt算例結(jié)果可知,GPS20與GPS50安全間隔值分別為22.653 km和22.772 km,如圖5所示,相差119 m,均可記為23 km。
圖4 民機(jī)導(dǎo)航性能與安全間隔變化關(guān)系Fig.4 Effect of RNP on the separation
圖5 無人機(jī)導(dǎo)航性能與安全間隔變化關(guān)系Fig.5 Effect of GPS on the separation
3.2 尾渦參數(shù)對安全間隔的影響
根據(jù)上文尾渦消散模型可知,在機(jī)型(考慮翼展、翼型參數(shù))和速度不同時,近場渦跡影響區(qū)及持續(xù)時間不同,影響碰撞模板大小,使得安全間隔值發(fā)生相應(yīng)變化。圖6為速度對間隔值的影響,可知速度越大,所需間隔越大。圖7為機(jī)型影響,同理,重型機(jī)(B747-400)尾跡區(qū)最大,所需間隔最大,中型機(jī)(737-800)與輕型機(jī)(CRJ900)所需間隔依次減小。總體來看,圖6線條較圖7稀疏,表明飛行速度對安全間隔的影響略大于機(jī)型。
圖6 民機(jī)速度與安全間隔變化關(guān)系Fig.6 Effect of speed on the separation
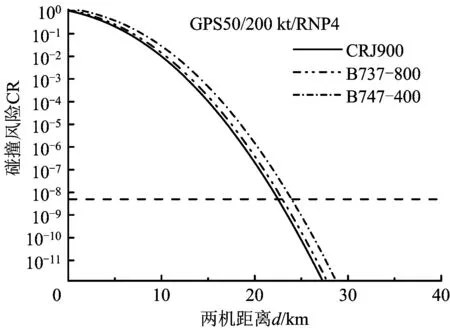
圖7 民機(jī)機(jī)型與安全間隔變化關(guān)系Fig.7 Effect of aircraft type on the separation
4 結(jié)論
1)無人機(jī)電子圍欄可考慮7.3 km實(shí)際影響區(qū)域在20 km現(xiàn)行標(biāo)準(zhǔn)下進(jìn)行相應(yīng)精細(xì)化設(shè)置。
2)航空器導(dǎo)航性能越差,所需間隔越大,且民機(jī)導(dǎo)航性能在安全間隔評估中的影響遠(yuǎn)大于無人機(jī)。
3)速度大小和機(jī)型大小與安全間隔值呈正比關(guān)系,且速度影響略大于機(jī)型影響。
4)無人機(jī)與民機(jī)間隔還包括側(cè)向、垂直等多種類型間隔,以及發(fā)動機(jī)噴流、電磁干擾以及復(fù)雜氣象等多種影響因素對間隔的影響,而機(jī)場凈空保護(hù)區(qū)劃設(shè)還應(yīng)考慮起落航線結(jié)構(gòu)和障礙物限制面等因素,因此模型仍具有一定的局限性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03