基于MATLAB/Simulink的欠驅動機器人仿真實驗
2018-10-30 09:53:32趙海濱陸志國于清文顏世玉
實驗室研究與探索 2018年9期
趙海濱, 劉 沖, 陸志國, 于清文, 顏世玉
(東北大學 機械工程與自動化學院,沈陽 110819)
0 引 言
機器人是一門多學科高度交叉的前沿學科,包括機械工程、電氣與電子工程、計算機科學、認知科學、生物學、控制論與控制工程等學科[1],無論在基礎理論方面還是在實踐應用方面發展都非常快。機器人動力學在機器人的教學中非常重要,可以用于機器人的實時控制研究、動態設計和仿真等[2]。機器人的動力學方程非常抽象和復雜,需要扎實的數學基礎,不容易理解。
在機器人的教材中,機器人動力學部分均以兩自由度機器人為研究對象[3]。Pendubot系統是一種典型的欠驅動兩自由度機器人[4],由在垂直平面上運動的兩個關節和一個驅動電機組成。Pendubot系統具有非線性和強耦合等特性[5-6]。控制方式包括擺起控制和平衡控制,擺起控制常用的算法有能量法[7-9]和滑膜控制方法[10-11]等,平衡控制常用線性二次型調節器(Linear quandratic regulator,LQR)。Pendubot系統作為一種典型的機電裝置,可以用于非線性控制和機器人領域的教學與科研,也可以作為一個基準系統對控制方法進行驗證。
本文首先對Pendubot系統的動力學方程和平衡控制進行理論分析,采用Matlab/Simulink建立動力學模型,進行Pendubot系統仿真和控制實驗。學生可以修改系統的參數,然后進行系統的動態仿真。該仿真系統能夠加深學生對欠驅動機器人仿真和控制的理解,能夠增強學生的學習興趣和熱情,并有助于培養學生的動手能力和創新意識。
1 Pendubot系統
1.1 動力學方程
欠驅動Pendubot系統有兩個關節組成,第一個關節是主動臂,第二個關節是欠驅動臂,如圖1所示。
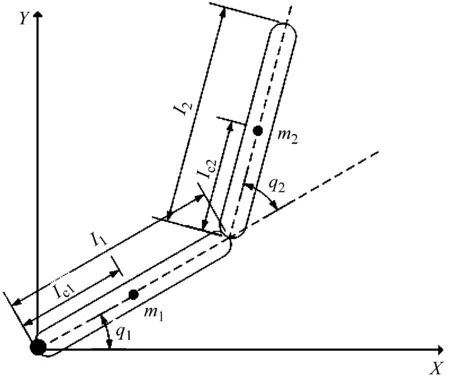
圖1 Pendubot模型
通過拉格朗日方程建立Pendubot系統的動力學方程[1]為

(1)

(2)
Pendubot系統動力學方程中的參數可以用下面的5個參數表示
(3)
式中:l1和l2分別為主動臂和欠驅動臂長度;lc1和lc2分別為主動臂和欠驅動臂質心長度;m1和m2分別為主動臂和欠驅動臂的質量;q1和q2分別表示主動臂和欠驅動臂角度;I1和I2分別表示主動臂和欠驅動臂質心轉動慣量。
將這些參數代入到Pendubot系統的動力學方程,可得:

Pendubot系統的主動臂由直流電動機驅動[12]。主動臂的驅動轉矩τ1和輸入電壓u的關系為
τ1=K1K2u
(4)
式中:K為電動機的轉矩常數,取值為0.412 5 N·m/A;K2為驅動器的增益系數,取值為2.68 A/V。
1.2 平衡控制

(5)
式中:參數A和B為常數矩陣,分別為
平衡控制采用線性二次型調節器(LQR)。LQR屬于現代控制理論,具有很好的魯棒性。LQR控制器是在一定的性能指標下,使系統的控制效果最佳。LQR控制器的力矩為
u=-Kx2
(6)

2 MATLAB/Simulink仿真實驗
MATLAB/Simulink具有強大的數學運算能力,以及方便實用的繪圖功能,已經成為系統仿真和自動控制領域普遍采用的計算機輔助設計工具[13-15]。在Simulink中采用普通的模塊搭建復雜控制系統非常的困難,采用User-Defined Functions庫中的MATLAB Function模塊,可以采用MATLAB語言非常方便靈活的建立復雜的系統[16]。
采用MATLAB/Simulink建立Pendubot系統如圖2所示。在圖2中,采用MATLAB Function模塊,根據式(2)建立Pendubot系統,然后采用兩個積分器,分別得到角速度和角度值,并將其反饋給Pendubot模塊。角度和角速度的初始值由外部設置。在圖2中,Pendubot模塊內的代碼為:
functionddq=fcn(q, dq, u)
q1=q(1); q2=q(2); dq1=dq(1); dq2=dq(2);
t1=0.010 6; t2=0.005 97; t3=0.005 09;
t4=0.075 1; t5=0.036 7;
g=9.81; q2=mod(q2, 2*pi);
d11=t1+t2+2*t3*cos(q2); d12=t2+t3*cos(q2);
d21=d12; d22=t2;
c11=-t3*sin(q2)*dq2;
c12=-t3*sin(q2)*(dq2+dq1);
c21=t3*sin(q2)*dq1;
g1=t4*g*cos(q1)+t5*g*cos(q1+q2);
g2=t5*g*cos(q1+q2);
D=[d11, d12; d21, d22]; C=[c11, c12; c21, 0];
G=[g1; g2]; k1=0.412 5; k2=2.68;
ddq=D([k1*k2*u; 0] - C*[dq1; dq2] - G);
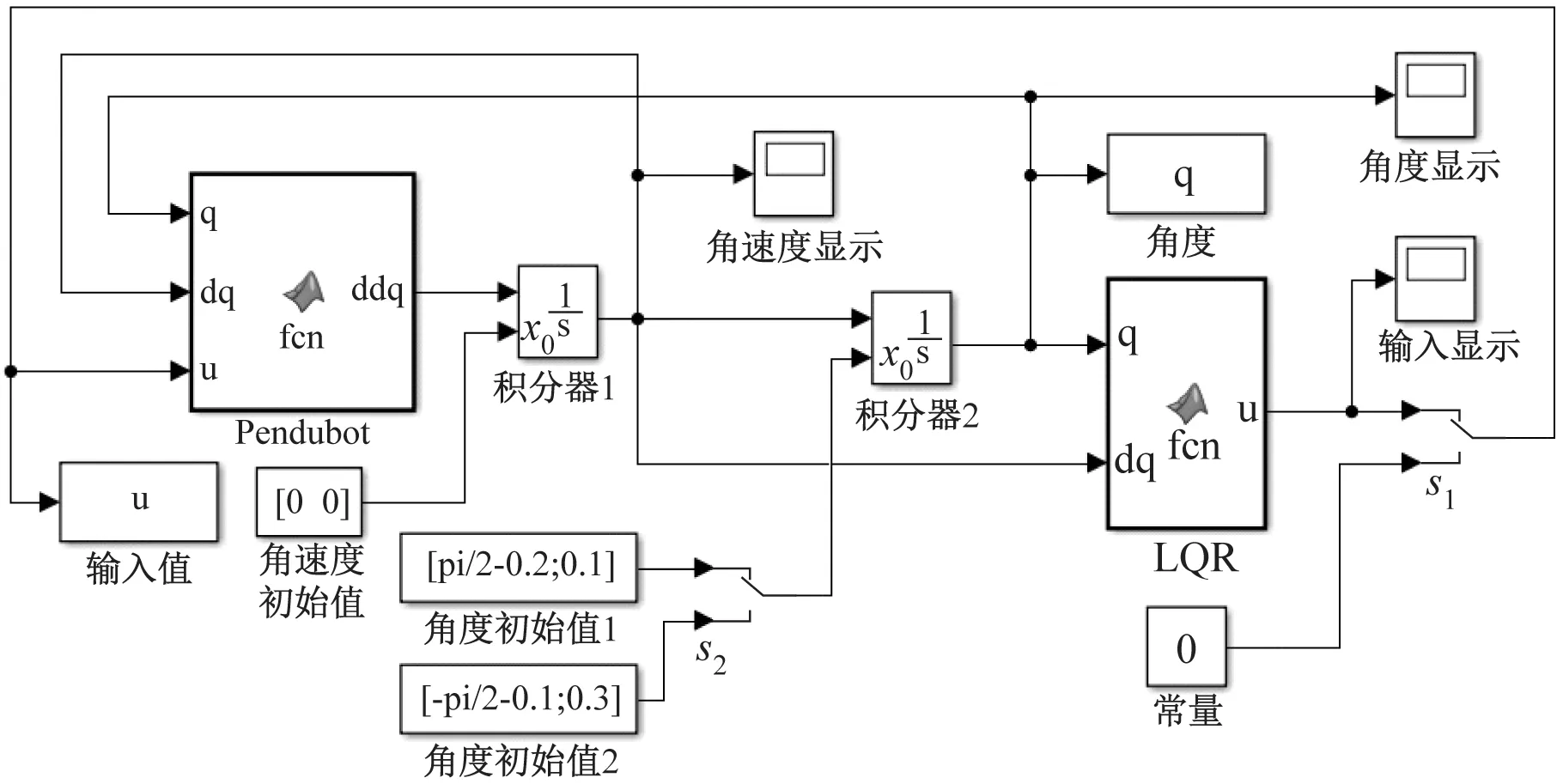
圖2 Pendubot系統
通過式(6),采用LQR進行平衡控制。在圖2中,LQR模塊內的代碼為:
function u=fcn(q,dq)
q1=q(1); q2=q(2); dq1=dq(1); dq2=dq(2);
K=-[37.6473, 36.7494, 6.7068, 4.8000];
u=-K*[q1-pi/2; q2; dq1; dq2];
圖2中,主動臂和欠驅動臂的初始角速度均為0。通過手動選擇開關S1選擇控制輸入為LQR或0,通過S2選擇初始的角度值。系統仿真采用變步長的ode45算法,最大仿真步長為1 ms,仿真時間為5 s。通過To Workspace模塊,可以將變量輸出到工作空間,然后再進一步的處理。
通過開關S1選擇輸入u為0,通過開關S2選擇初始狀態為[-π/2-0.1;0.3]T。在輸入為0的情況下,主動臂和欠驅動臂在豎直向下的穩定平衡位置附近自由擺動。在沒有輸入的情況下,主動臂角度q1在-π/2附近,欠驅動臂角度q2在0附近做周期性的運動,主動臂和欠驅動臂的角度值如圖3所示。
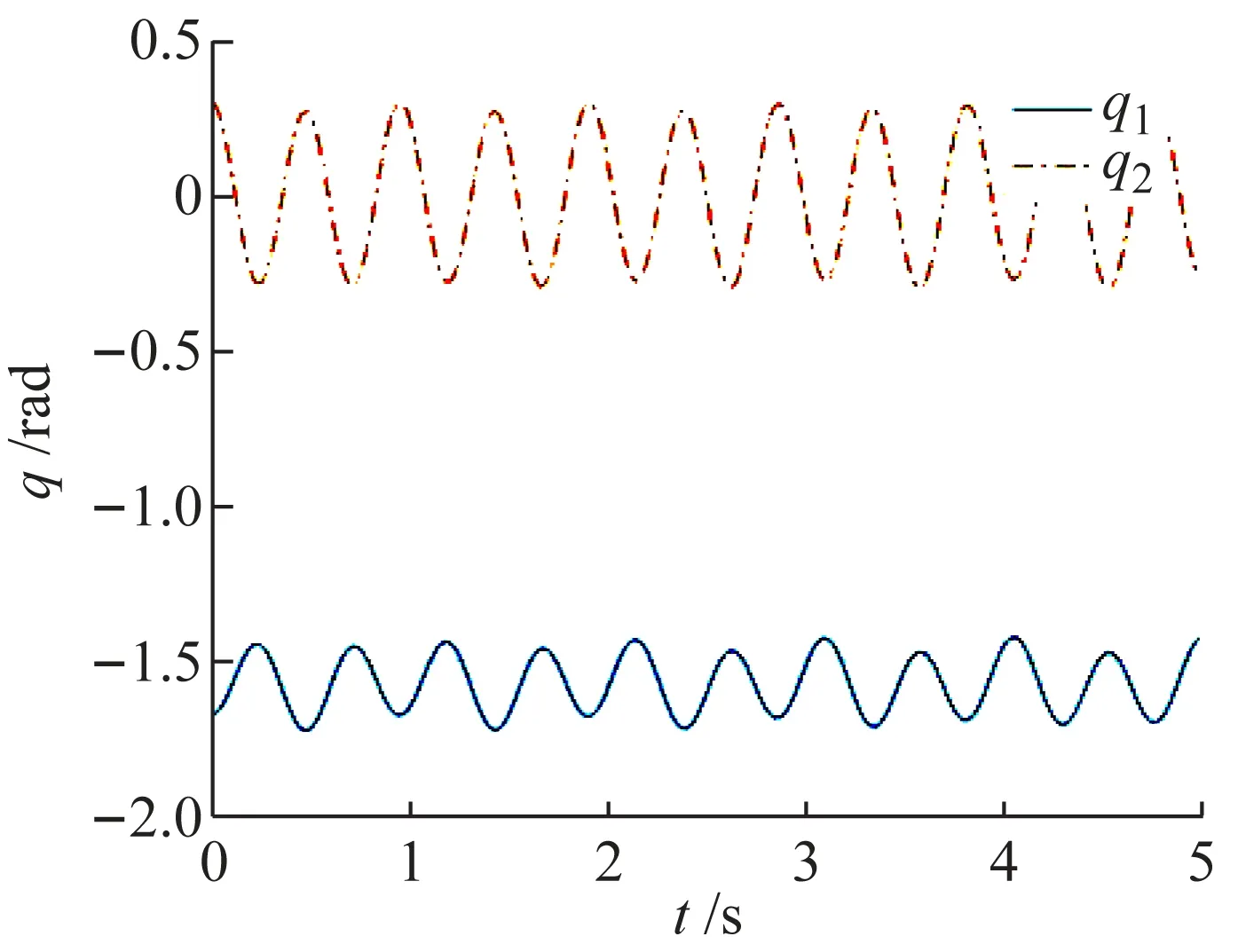
圖3 角度值q(輸入為0)
下面通過修改參數,采用LQR在豎直向上的不穩定平衡位置附近進行平衡控制。通過開關S1選擇輸入u為LQR的輸出,通過開關S2選擇初始狀態為[π/2-0.2;0.1]T。在LQR控制器下,角度值如圖4所示,主動臂的角度q1趨近于π/2,欠驅動臂的角度q2趨近于0,能進行平衡控制。
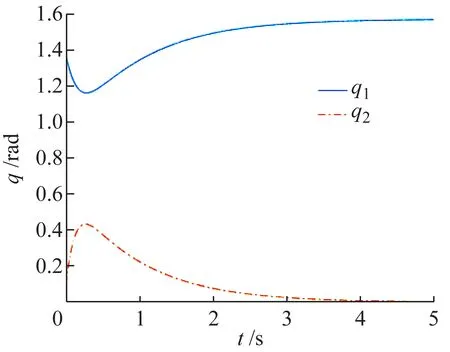
圖4 角度值(LQR)
3 結 語
本文以欠驅動兩自由度機器人Pendubot系統為研究對象,針對機器人動力學方程非常抽象復雜和不容易理解等特點,采用Matlab/Simulink軟件建立了仿真和控制實驗。根據動力學方程,采用MATLAB Function模塊建立了系統的仿真模型,并采用LQR進行平衡控制。仿真模型結構清晰,容易理解。學生可以修改系統的參數,然后進行動態仿真和觀察實驗結果,讓學生對機器人仿真和控制有一個非常直觀的了解,加深對理論知識的理解,增強學習的興趣和動力,并有助于培養學生的編程能力和創新意識。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55