變轉(zhuǎn)速旋翼直升機單發(fā)失效低速回避區(qū)分析
2018-10-30 12:00:30嚴(yán)旭飛池騁陳仁良李攀
航空學(xué)報 2018年10期
嚴(yán)旭飛,池騁,陳仁良,李攀
南京航空航天大學(xué) 直升機旋翼動力學(xué)國家級重點實驗室,南京 210016
出于對槳轂振動、系統(tǒng)復(fù)雜程度、發(fā)動機及傳動技術(shù)等問題的考慮,目前絕大多數(shù)直升機的旋翼都以固定轉(zhuǎn)速工作,因此只能使旋翼在一定的飛行條件下處于效能最優(yōu)狀態(tài)。事實上,依據(jù)當(dāng)前飛行速度、重量、飛行高度等參數(shù)適當(dāng)改變旋翼轉(zhuǎn)速,可以在整個飛行過程中實現(xiàn)最小化旋翼需用功率,從而大幅提高續(xù)航能力。
近年來,隨著材料技術(shù)、發(fā)動機技術(shù)與傳動技術(shù)的發(fā)展,變轉(zhuǎn)速旋翼(Variable Speed Rotor, VSR)已經(jīng)可以實現(xiàn),并被應(yīng)用到一些先進的旋翼飛行器上,以提高飛行性能。如A160蜂鳥長航時無人直升機、X2共軸剛性旋翼高速直升機、XV-15和V-22傾轉(zhuǎn)旋翼機等[1]。同時,越來越多的人從旋翼需用功率、航程航時[2-4]、振動載荷、旋翼噪聲[5-6]和操縱性[7-8]等方面進行變轉(zhuǎn)速旋翼直升機的設(shè)計和研究,以進一步提高直升機的各項飛行性能。
以上這些研究尚未考慮到旋翼轉(zhuǎn)速變化對直升機單發(fā)失效自轉(zhuǎn)著陸性能的影響。自轉(zhuǎn)著陸是直升機單發(fā)失效后安全著陸的唯一手段,因此自轉(zhuǎn)著陸性能也是直升機設(shè)計的一個重要指標(biāo)。而旋翼轉(zhuǎn)速的變化會改變旋翼當(dāng)前儲存的動能,進而影響到直升機的自轉(zhuǎn)著陸性能。對于具有兩臺或者多臺發(fā)動機的運輸類直升機來說,當(dāng)遭遇單發(fā)失效時,剩余發(fā)動機仍能輸出可用功率。如果能找到一個合適的旋翼轉(zhuǎn)速范圍,既可以減小旋翼的需用功率與剩余可用功率之間的差距,又可以保證旋翼具有足夠的動能進行自轉(zhuǎn)著陸,則該旋翼轉(zhuǎn)速不僅能有效降低直升機的需用功率,還有利于提高直升機單發(fā)失效后的自轉(zhuǎn)著陸性能。因此,本文主要研究變轉(zhuǎn)速旋翼對多發(fā)運輸類直升機單發(fā)失效后自轉(zhuǎn)著陸性能的影響。
直升機的單發(fā)失效自轉(zhuǎn)著陸性能可以通過回避區(qū)來直觀反映[9-10]。回避區(qū)顯示了駕駛員在正常操作期間的不安全區(qū)域(一般在低速范圍),在該區(qū)域內(nèi)如果出現(xiàn)單發(fā)失效,即使是最熟練的駕駛員也無法安全地進行自轉(zhuǎn)著陸。因此,回避區(qū)的范圍越小,說明直升機的自轉(zhuǎn)著陸性能越好;反之則說明直升機的自轉(zhuǎn)著陸性能越差。對于給定的飛行環(huán)境和直升機重量,回避區(qū)一般由發(fā)動機失效時直升機的高度和速度組合來描述,即高度-速度(Height-Velocity, H-V)曲線[10]。飛行試驗是確定H-V曲線的最終手段,但其風(fēng)險較高,且耗時耗資。為了降低飛行試驗的成本和風(fēng)險,近年來一般采用最優(yōu)控制方法來預(yù)測直升機的H-V曲線以及相應(yīng)的飛行軌跡和操縱過程[11-12],為飛行試驗提供理論依據(jù)[13-14]。
本文主要利用最優(yōu)控制方法研究變轉(zhuǎn)速旋翼直升機在遭遇單發(fā)失效時,不同旋翼轉(zhuǎn)速對自轉(zhuǎn)著陸低速回避區(qū)的影響。此外,由于直升機的航時、航程和升限等大部分性能指標(biāo)主要與直升機的需用功率相關(guān)[1-4],故本文還研究了低速范圍內(nèi)旋翼轉(zhuǎn)速對直升機需用功率的影響,并將兩種影響進行對比。除了操縱行程限制之外,本文對旋翼轉(zhuǎn)速變化無其他附加條件限制。事實上,旋翼轉(zhuǎn)速的變化還會影響到槳轂振動水平和氣動噪聲等,在工程應(yīng)用中應(yīng)綜合考慮,本文在計算分析時暫時不考慮這些因素。
首先以UH-60A直升機為樣機,建立三維剛體飛行動力學(xué)模型,并分析低速范圍內(nèi)旋翼轉(zhuǎn)速變化對直升機需用功率的影響。然后,在飛行動力學(xué)模型中加入單發(fā)失效后自轉(zhuǎn)著陸階段的發(fā)動機輸出功率和旋翼轉(zhuǎn)速變化方程[12],并使用操縱桿量的一階導(dǎo)數(shù)作為控制量,將直升機單發(fā)失效后的自轉(zhuǎn)著陸過程轉(zhuǎn)換為非線性最優(yōu)控制問題進行求解。最后,基于最小化回避區(qū)面積的思想,研究直升機在不同旋翼轉(zhuǎn)速下遭遇單發(fā)失效后的自轉(zhuǎn)著陸低速回避區(qū)變化,以及各旋翼轉(zhuǎn)速下回避區(qū)的高懸停點、拐點和低懸停點的最優(yōu)著陸軌跡和操縱過程,并將最小回避區(qū)對應(yīng)的旋翼轉(zhuǎn)速與最小需用功率對應(yīng)的旋翼轉(zhuǎn)速進行對比分析。
1 飛行動力學(xué)模型
以UH-60A直升機為樣機,首先建立常規(guī)直升機的三維剛體飛行動力學(xué)模型(模型建立和驗證過程詳見文獻[15],這里只作簡單描述)。其中旋翼模型采用葉素理論,槳葉剖面的氣動力系數(shù)由翼型風(fēng)洞試驗數(shù)據(jù)給出,槳葉揮舞運動由揮舞剛性二階動力學(xué)模型來描述;旋翼誘導(dǎo)速度采用Pitt-Peters一階動態(tài)入流模型,并考慮地面效應(yīng)和渦環(huán)狀態(tài)邊界;尾槳的氣動力模型與旋翼相似,采用葉素理論計算氣動力,誘導(dǎo)速度采用均勻入流模型計算,同時考慮旋翼和機身對尾槳的氣動干擾、渦環(huán)邊界以及垂尾對尾槳的阻塞效應(yīng);機身、平尾與垂尾的氣動力和氣動力矩系數(shù)采用風(fēng)洞試驗數(shù)據(jù)插值的方式得到,并計入旋翼尾跡和機身對平尾、垂尾的氣動干擾。模型的狀態(tài)空間形式可以表示為
(1)
通過配平方程式(1),可以研究直升機穩(wěn)態(tài)飛行時,旋翼轉(zhuǎn)速變化對直升機需用功率的影響,對應(yīng)的計算和分析結(jié)果見4.1節(jié)。
假設(shè)直升機在單發(fā)失效前處于穩(wěn)定前飛或者懸停狀態(tài)。遭遇單發(fā)失效后,駕駛員操縱直升機進入自轉(zhuǎn)著陸過程,則單發(fā)失效后發(fā)動機的輸出功率變化以及旋翼轉(zhuǎn)速變化可以表示為[12]
(2)
式中:PA為發(fā)動機輸出功率;POEI為剩余發(fā)動機最大可用功率;tp為響應(yīng)時間常數(shù);Ω為旋翼轉(zhuǎn)速;PMR為旋翼需用功率;PTR為尾槳需用功率;k為旋翼轉(zhuǎn)速與尾槳轉(zhuǎn)速的比例因子;η為直升機傳動效率因子;IMR為旋翼轉(zhuǎn)動慣量;ITR為尾槳轉(zhuǎn)動慣量。
為了避免在軌跡優(yōu)化過程中操縱量出現(xiàn)跳躍或者不連續(xù)的現(xiàn)象,并考慮到操縱系統(tǒng)特性和駕駛員操縱速率的限制,將操縱量ub對時間的一階導(dǎo)數(shù)(uc,ulat,ulon,up)作為模型控制變量,并把(δc,δlat,δlon,δp)作為模型狀態(tài)變量的一部分[12],即
(3)
式(1)~式(3)共同構(gòu)成了適用于計算直升機單發(fā)失效后軌跡優(yōu)化的三維剛體飛行動力學(xué)模型。其微分方程形式可表示為
(4)
式中:
(5)
2 問題建立與求解
2.1 回避區(qū)
利用最優(yōu)控制方法和最小化回避區(qū)面積的思想計算H-V曲線[9-10],其主要思路為:在可實現(xiàn)安全自轉(zhuǎn)著陸的條件下最小化回避區(qū)面積。在給定的飛行環(huán)境和直升機重量下,為求任意高度h0(本文將回避區(qū)的高度h定義為UH-60A直升機輪胎底面距離地面的高度)下的回避區(qū)邊界點(即對應(yīng)的前飛速度V0),首先選擇一個最小初始速度(一般為0 m/s),然后逐步增加速度來計算單發(fā)失效后的最優(yōu)自轉(zhuǎn)著陸過程,直到增加至某一速度時,對應(yīng)的自轉(zhuǎn)著陸過程可實現(xiàn)且令人滿意,則此高度和速度的組合即為該高度下的回避區(qū)邊界點。由上述邊界點組成的曲線即為H-V曲線,如圖1所示。H-V曲線存在3個重要的邊界點,即高懸停點(High Hover Point),拐點(Knee Point)和低懸停點(Low Hover Point)。這3個點將低速H-V曲線分為上下兩個邊界。其中上邊界以下表示直升機進入自轉(zhuǎn)著陸過程后,無法滿足安全著陸的要求;下邊界以下表示直升機直接著陸,但由于高度很低,駕駛員可以通過適當(dāng)?shù)牟倏v使過載保持在設(shè)計載荷范圍內(nèi)。H-V曲線是直升機自轉(zhuǎn)著陸的極限包線,所以單發(fā)失效回避區(qū)的H-V曲線的范圍可以直觀反映直升機遭遇單發(fā)失效后的自轉(zhuǎn)著陸性能。
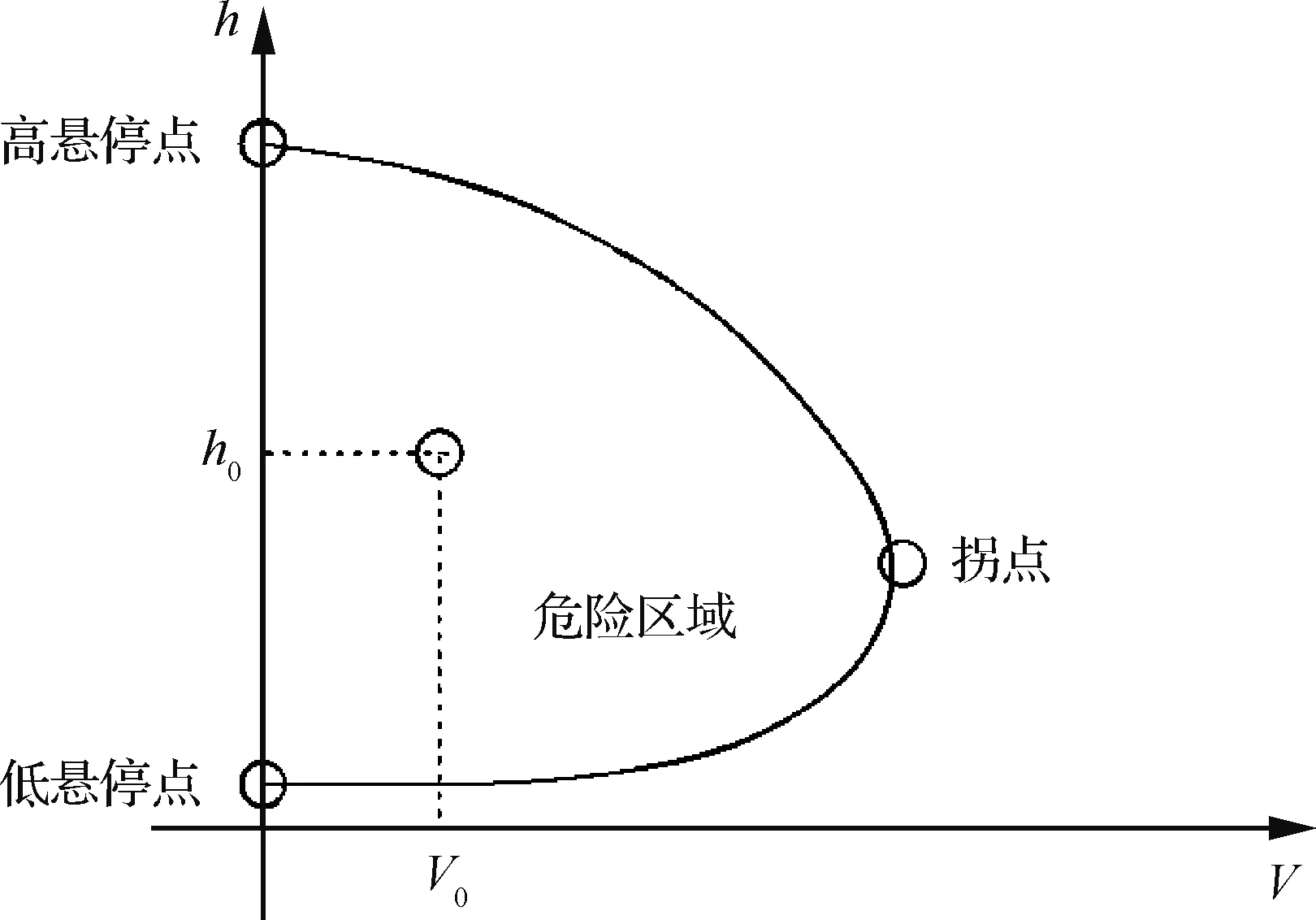
圖1 低速狀態(tài)高度-速度曲線Fig.1 High-velocity curve in low-speed state
2.2 非線性最優(yōu)控制問題
預(yù)測H-V曲線方法的核心在于計算最優(yōu)自轉(zhuǎn)著陸過程。直升機單發(fā)失效后的最優(yōu)自轉(zhuǎn)著陸過程可以被描述為一種含有狀態(tài)量和控制量約束的非線性最優(yōu)控制問題[12]。該問題一般由優(yōu)化變量、性能指標(biāo)和約束方程構(gòu)成。其中優(yōu)化變量即為模型式(4)中的狀態(tài)量y和控制量u,以及駕駛員進行自轉(zhuǎn)著陸過程的初始時刻t0和結(jié)束時刻tf。性能指標(biāo)和約束方程的選擇如下所述。
2.2.1 性能指標(biāo)
直升機單發(fā)失效后的最優(yōu)自轉(zhuǎn)著陸過程需要考慮到很多因素。整個過程不僅要保證飛行安全和駕駛員的可操縱性,還需要考慮到時間、駕駛員操縱負(fù)荷以及姿態(tài)角的穩(wěn)定性等。此外,還應(yīng)該最小化直升機著陸時的前飛速度和下降率。本文選擇的性能指標(biāo)為
minJ=wttf+wuUg(tf)+wwWg(tf)+
(6)
式中:
(7)
其中:Ug和Wg分別為地軸系下的前飛速度和下降率;uc,max、ulat,max、ulon,max及up,max為駕駛員桿量的最大操縱速率;φ和ψ分別為滾轉(zhuǎn)角和偏航角;φmax和ψmax分別為自轉(zhuǎn)著陸過程中限制的最大滾轉(zhuǎn)角和偏航角;wt、wu、ww、w1~w6為常數(shù)權(quán)重因子。
2.2.2 約束方程
約束方程由微分方程、初始邊界條件、路徑約束和末端邊界條件組成。其中微分方程為飛行動力學(xué)模型式(4),其他約束方程包括:
1) 初始邊界條件(t0時刻)
根據(jù)旋翼飛行器適航管理條例規(guī)定[16],假設(shè)直升機在單發(fā)失效時,駕駛員延遲1 s后開始操縱直升機(即t0=1 s)。為此,首先根據(jù)當(dāng)前飛行狀態(tài)對主控方程式(1)進行配平計算,然后通過積分求解微分方程(4)在延遲時間內(nèi)的自由響應(yīng),最后得到初始邊界條件[12]為
y(t0)=ydelay,u(t0)=udelay
(8)
2) 路徑約束
根據(jù)適航管理條例、飛行任務(wù)和駕駛員操縱速率約束來確定路徑約束,可表示為
(9)
式中:ymin、ymax和umin、umax分別為飛行過程中狀態(tài)量和控制量的最小值和最大值。
3) 末端邊界條件(tf時刻)
根據(jù)適航管理條例關(guān)于自轉(zhuǎn)著陸的規(guī)定即可確定末端邊界條件,可表示為
yf,min≤y(tf)≤yf,max
(10)
式中:yf,min和yf,max分別為末端狀態(tài)量的最小值和最大值。
2.3 數(shù)值解法
目前求解復(fù)雜非線性最優(yōu)控制問題最有效的方法,是通過直接方法將該問題轉(zhuǎn)換為非線性規(guī)劃(NLP)問題,然后采用序列二次規(guī)劃(SQP)方法進行求解[17]。本文采用直接方法中的直接多重打靶法來完成這一轉(zhuǎn)換過程。直接多重打靶法通常用于轉(zhuǎn)換具有大量自由度以及中等或高復(fù)雜性的最優(yōu)控制問題[18-19],因此適用于轉(zhuǎn)換本文建立的最優(yōu)控制問題。
為了防止由于優(yōu)化變量之間數(shù)量級相差較大而造成的數(shù)值求解困難,首先對飛行動力學(xué)模型式(4)進行無量綱縮放處理(具體過程詳見文獻[12])。無量綱縮放后的飛行動力學(xué)模型可表示為
(11)

圖2為直接多重打靶法的基本原理示意圖。如圖2所示,首先將時間的無量綱τ平均離散為N-1個時間打靶段:
(12)
在每個離散時間節(jié)點處,形成離散的狀態(tài)和控制參數(shù),則優(yōu)化變量可表示為
(13)
在第k個打靶段上,以時間步進的方式從τk~τk+1對微分方程式(4) 進行積分,可以得到
(14)
式中:
(15)
采用同樣的方式對性能指標(biāo)進行離散:

圖2 直接多重打靶法Fig.2 Direct multiple shooting method

(16)

將路徑約束作用在各個時間打靶段節(jié)點上,得到
(17)
將邊界條件作用在初始和末端時間節(jié)點上,得到
(18)
將最優(yōu)控制問題轉(zhuǎn)換為非線性規(guī)劃問題之后,應(yīng)用具有良好魯棒性的序列二次規(guī)劃算法[20]進行求解,最后通過插值逼近的方法計算得到原最優(yōu)控制問題的近似最優(yōu)解。本文先對每一個時間打靶段上的離散控制量進行線性插值來逼近連續(xù)的最優(yōu)控制過程,然后以時間步進的方式從t0~tf積分狀態(tài)方程式(4)來逼近最優(yōu)控制問題的連續(xù)最優(yōu)狀態(tài)過程。
3 最優(yōu)控制方法驗證
本節(jié)采用UH-60A直升機模擬單發(fā)失效后自轉(zhuǎn)著陸的飛行試驗數(shù)據(jù)[21]進一步驗證本文建立的最優(yōu)控制方法的可行性和準(zhǔn)確性。
本文所用樣機型號和飛行試驗[21]一致,直升機的飛行任務(wù)如下:質(zhì)量為7 239 kg,處于懸停狀態(tài),標(biāo)準(zhǔn)大氣環(huán)境,高度為9.1 m。隨后駕駛員關(guān)閉單臺發(fā)動機模擬單發(fā)失效,在延遲1.2 s以后開始進入自轉(zhuǎn)著陸過程。
末端約束根據(jù)旋翼飛行器適航管理條例關(guān)于自轉(zhuǎn)著陸的要求確定為
(19)

(20)
式中:u、v、w分別為直升機體軸系下的3個速度;ycg為直升機質(zhì)心的側(cè)向位移;xcg為直升機質(zhì)心的前向位移。性能指標(biāo)中的權(quán)重系數(shù)為:wt=0.01,wu=0.03,ww=0.03,w1=w2=w3=w4=0.15,w5=w6=0.12。
圖3為本文計算的單發(fā)失效最優(yōu)自轉(zhuǎn)著陸過程與飛行試驗數(shù)據(jù)的對比,其中nz為垂向過載因子。可以看出,兩者吻合較好,且本文計算的總距桿操縱量、垂向過載和俯仰角的變化更加柔和。這是因為在實際試飛過程中,駕駛員的操縱策略不一定是最優(yōu)的。而最優(yōu)控制方法可以對操縱速率進行控制和約束,并能根據(jù)性能指標(biāo)尋找最優(yōu)解,因此可以得到更好的操縱策略和飛行軌跡。通過與飛行試驗數(shù)據(jù)的對比,說明了本文采用的最優(yōu)控制方法的可行性和準(zhǔn)確性。
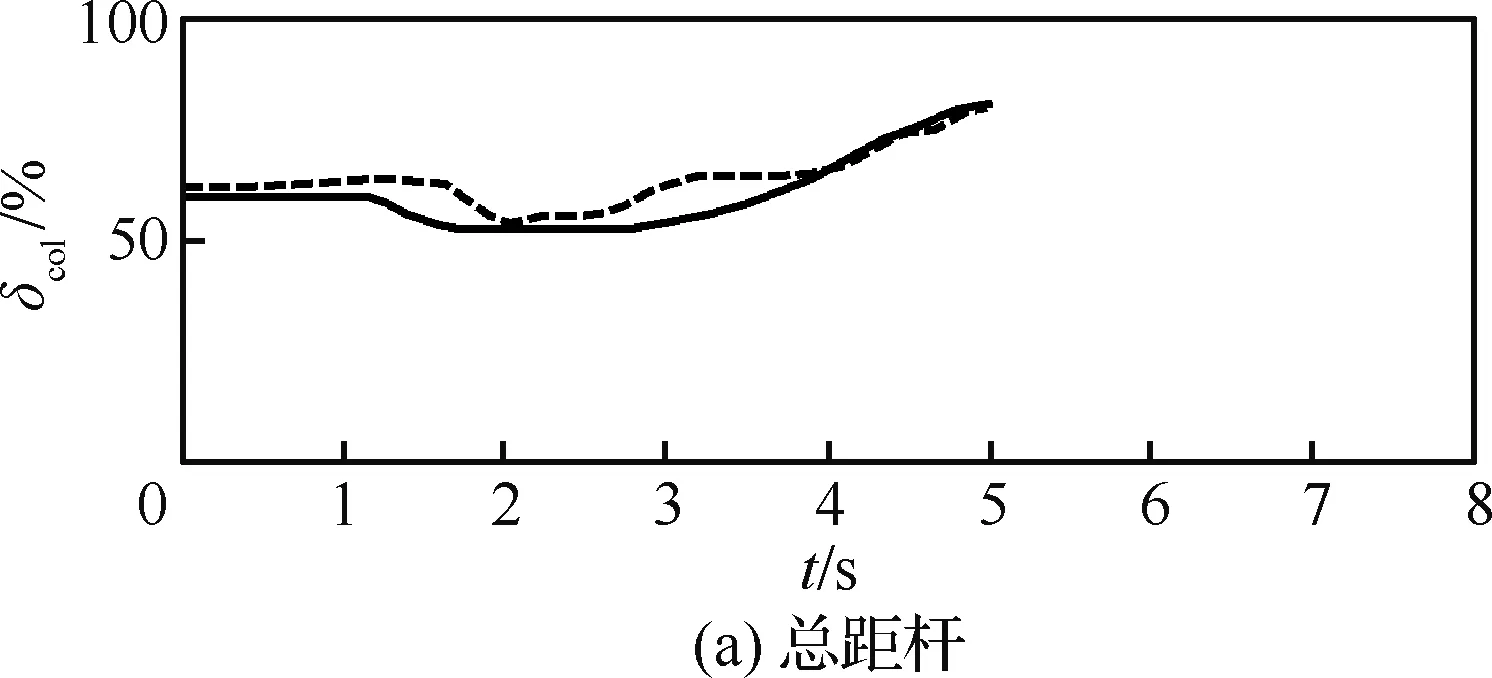
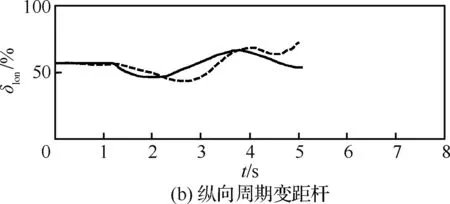
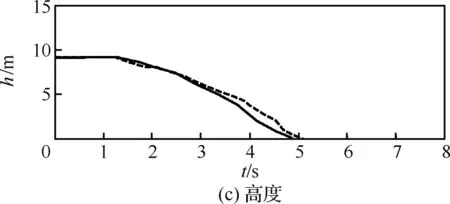
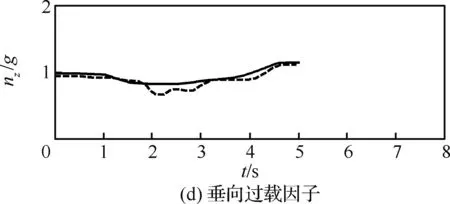
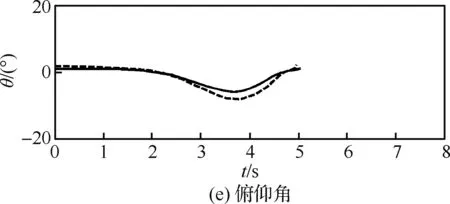

圖3 單發(fā)失效最優(yōu)自轉(zhuǎn)著陸計算與飛行試驗數(shù)據(jù)對比Fig.3 Comparison of calculated optimal autorotation landing procedure in one engine inoperative and flight test data
4 計算結(jié)果與分析
UH-60A直升機在總重較低(小于7 407 kg)時,單發(fā)失效后的回避區(qū)很小,甚至消失。為了能較為明顯地看出旋翼轉(zhuǎn)速對低速回避區(qū)的影響,本文采用總重為9 185 kg的UH-60A直升機進行計算分析。同時假設(shè)單發(fā)失效時直升機處于標(biāo)準(zhǔn)大氣壓下的配平狀態(tài),并考慮1 s的駕駛員反應(yīng)延遲時間。其中末端約束、路徑約束和性能指標(biāo)的取值與第3節(jié)一致。
4.1 旋翼轉(zhuǎn)速對直升機需用功率的影響
圖4顯示了低速范圍內(nèi)不同旋翼轉(zhuǎn)速下的直升機需用功率,其中Ω0為直升機標(biāo)準(zhǔn)旋翼轉(zhuǎn)速1 hp=0.735 498 7 kW。單臺發(fā)動機的最大可用功率也顯示在圖中。可以看出,隨著旋翼轉(zhuǎn)速的降低,需用功率會減小。但當(dāng)旋翼轉(zhuǎn)速降低到某一特定值時(即80%Ω0,對應(yīng)前飛速度范圍0 ~20 m/s),隨著旋翼轉(zhuǎn)速的降低,需用功率會開始增加。這是因為旋翼轉(zhuǎn)速過低時,反流區(qū)增大,槳葉段的失速帶來了更大的旋翼功率損失。圖4不再討論比76%Ω0更低的旋翼轉(zhuǎn)速,這是因為此時駕駛員的總距桿操縱量已經(jīng)接近滿行程。除此之外,當(dāng)旋翼轉(zhuǎn)速繼續(xù)下降時,直升機的前進比不斷增大,旋翼槳盤兩邊的氣流不對稱性加劇,直升機難以配平。
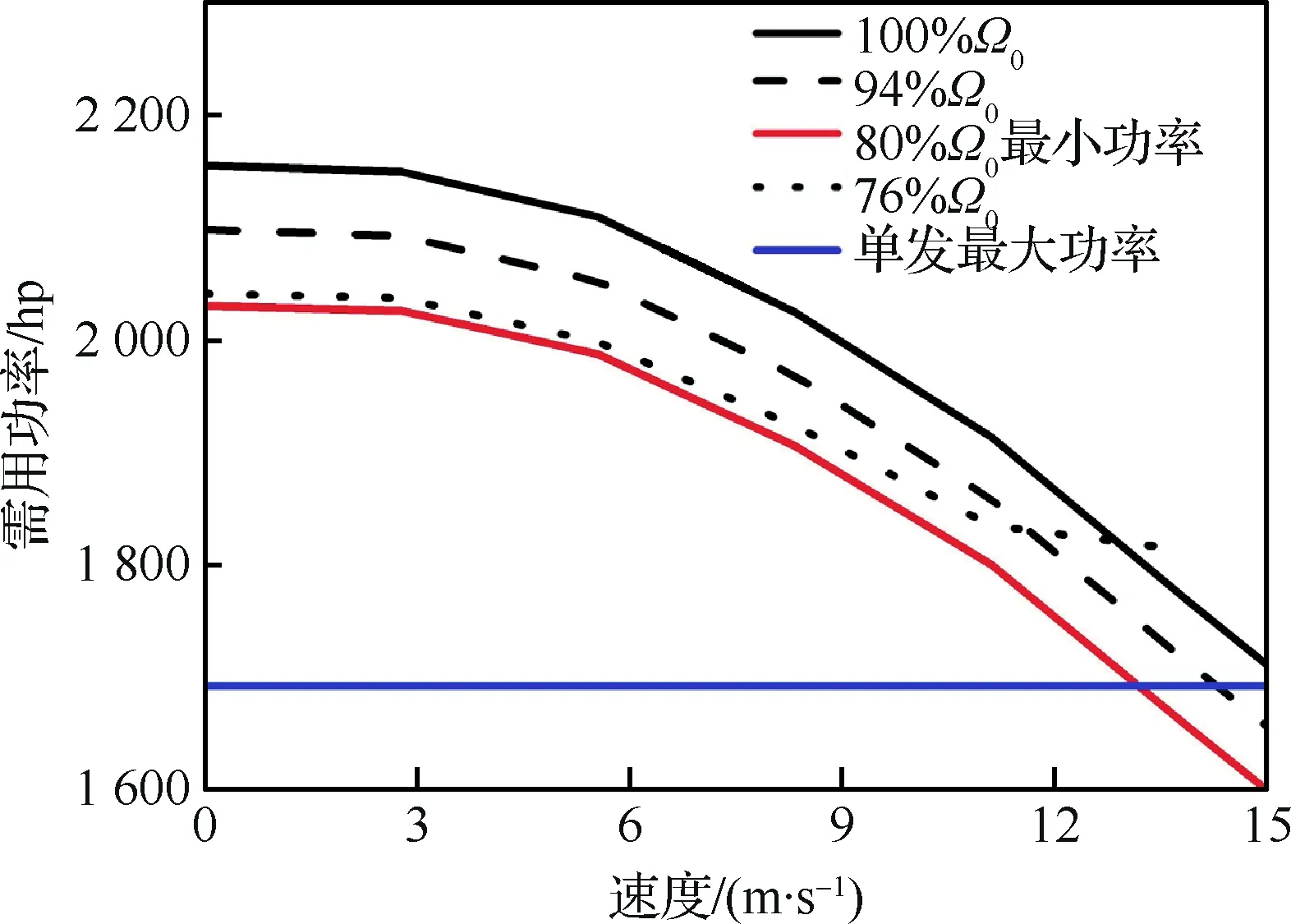
圖4 低速區(qū)直升機需用功率隨旋翼轉(zhuǎn)速的變化Fig.4 Variation of helicopter required power with rotor speed in low-speed zone
4.2 旋翼轉(zhuǎn)速對低速回避區(qū)的影響
圖5顯示了各旋翼轉(zhuǎn)速下發(fā)生單發(fā)失效后的H-V曲線。可以看出,當(dāng)旋翼轉(zhuǎn)速從100%Ω0降低到84%Ω0時,回避區(qū)的面積逐漸縮小。這是因為直升機的需用功率與剩余發(fā)動機最大可用功率之間的差距隨著旋翼轉(zhuǎn)速的降低而變小,這有利于直升機單發(fā)失效后的自轉(zhuǎn)著陸。而當(dāng)旋翼轉(zhuǎn)速從84%Ω0降低到76%Ω0時,回避區(qū)的面積迅速增大。這主要是因為此時存儲在旋翼中的動能過低,且需用功率達到最低后逐漸開始增大,不利于直升機單發(fā)失效后的自轉(zhuǎn)著陸。
圖6進一步顯示了4個旋翼轉(zhuǎn)速(其中包括最小需用功率對應(yīng)的旋翼轉(zhuǎn)速)下直升機單發(fā)失效后的低速H-V曲線。可以發(fā)現(xiàn),達到最小H-V 區(qū)域時所對應(yīng)的旋翼轉(zhuǎn)速(84%Ω0)略高于最小需用功率對應(yīng)的旋翼轉(zhuǎn)速(80%Ω0)。這是因為雖然在80%Ω0下,直升機的需用功率最低,但是此時存儲在旋翼中的動能也較小,因此最優(yōu)的自轉(zhuǎn)著陸性能需要更高的旋翼轉(zhuǎn)速,即84%Ω0。
圖5 各旋翼轉(zhuǎn)速下單發(fā)失效后的H-V曲線Fig.5 H-V curve of different rotor speeds after one engine inoperative
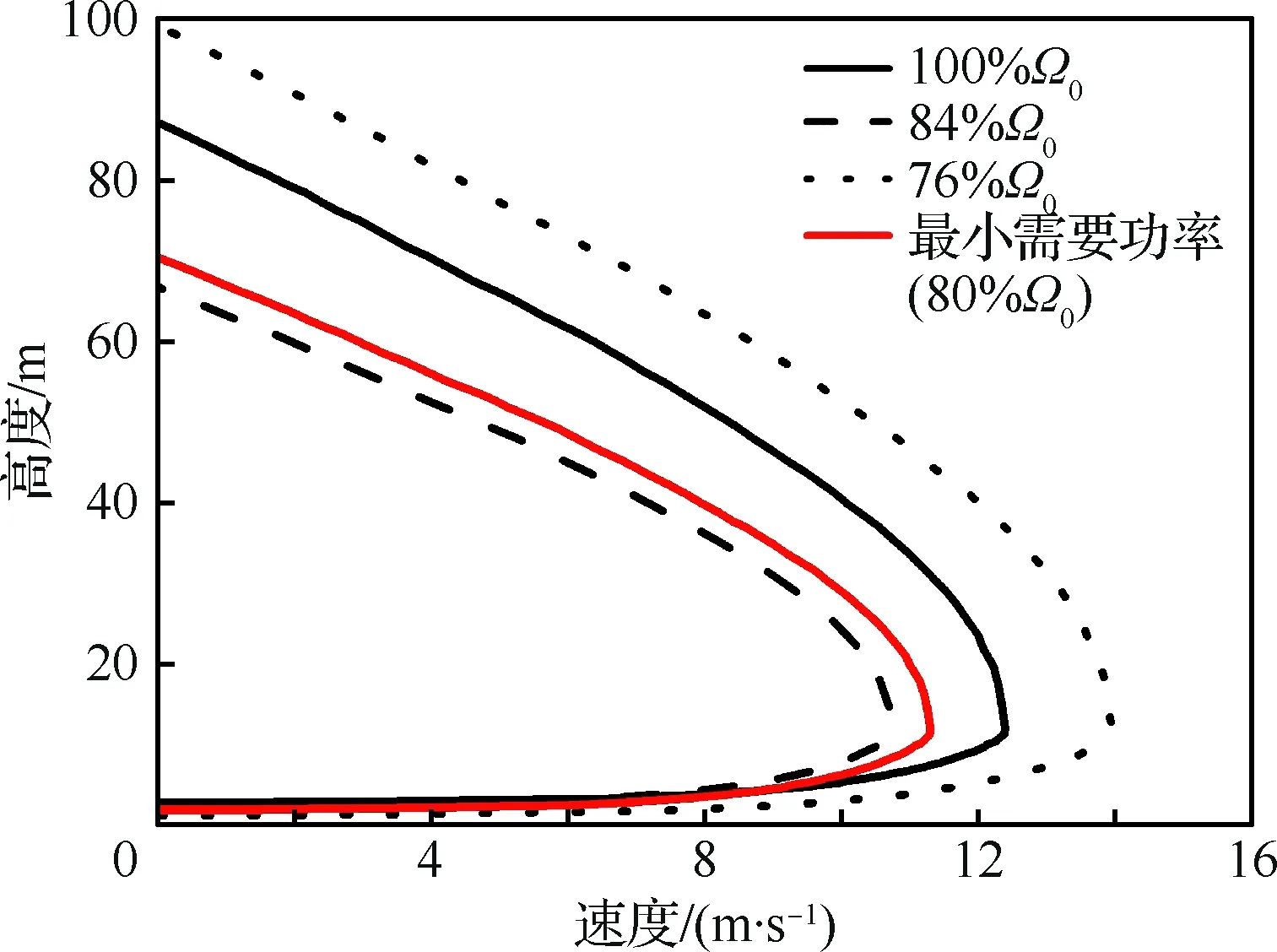
圖6 4個旋翼轉(zhuǎn)速下單發(fā)失效后的H-V曲線Fig.6 H-V curves of 4 rotor speeds after one engine inoperative
此外,這兩個旋翼轉(zhuǎn)速下的回避區(qū)非常接近,說明旋翼轉(zhuǎn)速在80%Ω0~84%Ω0之間時,不僅能有效降低直升機的需用功率,還能提高直升機單發(fā)失效后的自轉(zhuǎn)著陸性能。
4.3 旋翼轉(zhuǎn)速對單發(fā)失效自轉(zhuǎn)著陸的影響
圖7~圖9顯示了不同旋翼轉(zhuǎn)速下,H-V曲線上3個關(guān)鍵點(高懸停點、拐點和低懸停點)的最優(yōu)單發(fā)失效自轉(zhuǎn)著陸過程,從圖中可以得到以下結(jié)論:
1) 各個旋翼轉(zhuǎn)速下,3個關(guān)鍵點對應(yīng)的最優(yōu)自轉(zhuǎn)著陸軌跡、速度和俯仰角變化均較為合理。在高懸停點處(圖7),直升機存在顯著的低頭俯沖加速和抬頭減速的現(xiàn)象(圖7(d))。駕駛員先壓桿降低總距維持轉(zhuǎn)速(圖7(e)),然后著陸時提桿增大總距(圖7(f))減小觸地速度(圖7(b)和圖7(c));在拐點處(圖8),注意到76%Ω0時只有抬頭減速的現(xiàn)象(圖8(d)),這是因為在該旋翼轉(zhuǎn)速下拐點對應(yīng)的前飛速度較大(14.2 m/s),駕駛員需要首先減速才能保證觸地時的前飛速度在規(guī)定范圍以內(nèi)(12.2 m/s)。此外,旋翼轉(zhuǎn)速與駕駛員總距桿的變化與圖7基本一致,但幅度較小;在低懸停點處(圖9),直升機幾乎垂直降落(圖9(a)),但觸地速度不大(圖9(b)和圖9(c)),駕駛員操縱幅度較小(圖9(f))。
2) 隨著旋翼轉(zhuǎn)速降低至76%Ω0,3個關(guān)鍵點上的駕駛員初始總距桿量均接近最大行程。尤其是在高和低懸停點處,總距桿量超過了90%,且需要維持最大操縱行程近1 s的時間(圖7(f)和圖9(f)中的虛線),期間失去了控制余量,不利于飛行安全。再加上此時旋翼本身儲存的動能較小,且需用功率開始增大,導(dǎo)致旋翼轉(zhuǎn)速在76%Ω0時單發(fā)失效低速回避區(qū)的面積迅速增大(圖5和圖6)。
3) 在80%Ω0和84%Ω0的旋翼轉(zhuǎn)速下,駕駛員的初始總距桿量會增加,但仍舊留有一定的控制余量,因此直升機在自轉(zhuǎn)著陸時可以充分利用旋翼儲存的動能。雖然旋翼儲存的動能會降低,但由于旋翼需用功率也大幅降低,因此剩余發(fā)動機提供的最大可用功率可以使其更加順利地完成單發(fā)失效后的自轉(zhuǎn)著陸過程。
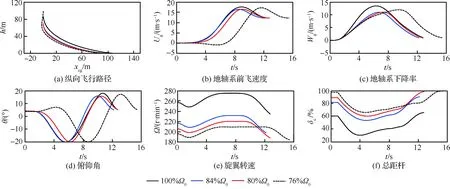
圖7 單發(fā)失效最優(yōu)自轉(zhuǎn)著陸過程(4個轉(zhuǎn)速、高懸停點)Fig.7 Optimal autorotation landing procedure with 4 rotor speeds at high hover point after one engine inoperative
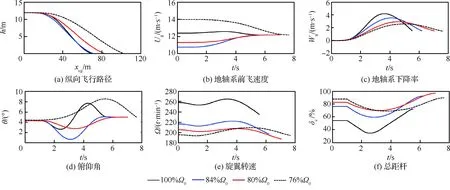
圖8 單發(fā)失效最優(yōu)自轉(zhuǎn)著陸過程(4個轉(zhuǎn)速、拐點)Fig.8 Optimal autorotation landing procedure with 4 rotor speeds at knee point after one engine inoperative
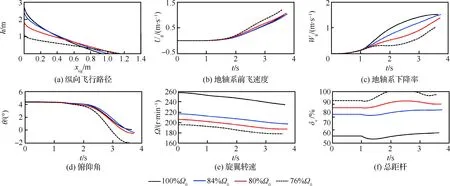
圖9 單發(fā)失效最優(yōu)自轉(zhuǎn)著陸過程(4個轉(zhuǎn)速、低懸停點)Fig.9 Optimal autorotation landing procedure with 4 rotor speeds at low hover point after one engine inoperative
5 結(jié) 論
以UH-60A直升機為例,利用最優(yōu)控制方法研究了變轉(zhuǎn)速旋翼直升機在遭遇單發(fā)失效時,旋翼轉(zhuǎn)速對自轉(zhuǎn)著陸低速回避區(qū)和最優(yōu)自轉(zhuǎn)著陸過程的影響。
1) 降低旋翼轉(zhuǎn)速可明顯減小直升機的需用功率,但是過低的旋翼轉(zhuǎn)速反而會帶來旋翼需用功率的增加,并會導(dǎo)致總距桿的控制余量不足,以及引發(fā)配平問題。
2) 適當(dāng)降低旋翼轉(zhuǎn)速可以減小直升機的需用功率與剩余發(fā)動機最大可用功率之間的差距,但也會減小存儲在旋翼中的動能。因此,要達到最優(yōu)的自轉(zhuǎn)著陸性能,必須綜合考慮旋翼轉(zhuǎn)速對以上兩個方面的影響。本文算例中,隨著旋翼轉(zhuǎn)速的降低,直升機單發(fā)失效后的低速回避區(qū)首先會逐漸縮小,然后迅速增大。最小回避區(qū)對應(yīng)的旋翼轉(zhuǎn)速略高于最小需用功率對應(yīng)的旋翼轉(zhuǎn)速。旋翼轉(zhuǎn)速在80%Ω0~84%Ω0之間較為合理。
3) 本文計算的各旋翼轉(zhuǎn)速下的最優(yōu)自轉(zhuǎn)著陸過程較為合理。在算例中,當(dāng)旋翼轉(zhuǎn)速降低至76%Ω0時,回避區(qū)3個關(guān)鍵點上的駕駛員總距桿變化均接近最大行程,容易失去控制余量,不利于飛行安全。再加上此時旋翼本身儲存的動能較小,且需用功率開始增大,使得旋翼轉(zhuǎn)速在76%Ω0時單發(fā)失效低速回避區(qū)的面積迅速增大。
4) 在80%Ω0和84%Ω0的旋翼轉(zhuǎn)速下,駕駛員的總距桿量仍舊留有一定的控制余量,直升機在自轉(zhuǎn)著陸時可以充分利用旋翼儲存的動能。雖然旋翼儲存的動能會降低,但由于旋翼需用功率也大幅減小,因此剩余發(fā)動機提供的功率可以使其更加順利地完成單發(fā)失效后的自轉(zhuǎn)著陸過程。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實用技術(shù)(2022年4期)2022-03-07 06:07:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03