風洞試驗繩牽引并聯(lián)支撐技術研究進展
2018-10-30 11:50:26王曉光林麒
航空學報 2018年10期
王曉光,林麒
廈門大學 航空航天學院,廈門 361005
風洞試驗是現(xiàn)代飛行器設計和研制過程中必不可少的環(huán)節(jié)。其中,模型支撐系統(tǒng)的設計與分析是風洞試驗的核心技術,為獲得全面、準確的氣動參數(shù),它要求既能夠實現(xiàn)特定的飛行器模型靜態(tài)、動態(tài)變化,又要降低支撐干擾,在滿足風洞試驗相關條件下具有較大的剛度,盡量減小系統(tǒng)變形和振動[1]。
隨著空中對抗的日趨激烈,新型戰(zhàn)斗機更加強調(diào)高機動性、高敏捷性,要求具備大迎角過失速機動、急速轉彎等能力,要求風洞試驗盡可能體現(xiàn)實際飛行狀態(tài),以探索復雜的氣動/運動/控制耦合特性。傳統(tǒng)的風洞試驗模型支撐方式,如腹撐、尾撐等,由于其干擾和動態(tài)性能受限等原因,使得其在新型飛行器研制過程中的應用受到一定的限制。雖然目前國內(nèi)外也已發(fā)展了風洞虛擬飛行試驗技術[2]、風洞模型自由飛試驗技術[3]等,如國內(nèi)相關院所開展了針對導彈模型與先進飛行器模型的虛擬飛行試驗平臺建設[4-5];英國針對Hawk飛機模型研制了一種五自由度(Degree of Freedom, DOF)動態(tài)試驗裝置[6];德國DNW (German-Dutch Wind tunnels)低速風洞開發(fā)了一種剛性的六自由度運動模型支撐裝置[7]。但從具有多功能風洞試驗能力和降低研制成本等因素考慮,并結合當前發(fā)展迅速的智能化技術,仍然迫切需求研制新型智能風洞試驗支撐機構,為揭示新的非定常、非線性氣動特性,構建更加精準的氣動模型,以及現(xiàn)代戰(zhàn)斗機戰(zhàn)術動作的發(fā)展提供重要的研究平臺和技術手段[8]。
繩牽引并聯(lián)支撐系統(tǒng)(Wire/cable-Driven Parallel Suspension System, WDPSS)是基于并聯(lián)機器人技術的一種新型機構,具有可伸縮性,通過傳動機構調(diào)整繩索的長度很容易實現(xiàn)較大的工作空間,同時具有結構簡單、成本低、響應速度快、動態(tài)性好等優(yōu)點,非常適用于機械加工、裝卸運載、航空航天等領域,已成為近年來研究的熱點[9-11]。在航空應用方面,采用繩牽引并聯(lián)機構作為飛行器模型的支撐方式具有很大的創(chuàng)新性,為風洞試驗提供了一種新型支撐技術。與傳統(tǒng)的風洞試驗支撐方式相比,繩牽引并聯(lián)支撐不僅提高了系統(tǒng)剛度,能夠有效減小對流場的干擾,提高試驗結果的精準度,更能適應特殊構型模型的支撐,以及需要飛行器進行多姿態(tài)角耦合運動、大位移變化的特種試驗,如大幅值振蕩氣動力測量、模型底部壓力測量以及復雜動態(tài)試驗等[1]。因此,發(fā)展繩牽引并聯(lián)支撐系統(tǒng)是提高風洞試驗模擬精準度、解決復雜模型支撐以及滿足特殊試驗要求的一種有效手段,具有重要的理論研究意義和工程應用價值。
本文首先從一般角度出發(fā),詳細論述繩系支撐在風洞試驗中的研究現(xiàn)狀,并進行歸納總結。其次,基于繩牽引并聯(lián)機器人基本理論,對支撐系統(tǒng)進行分類,根據(jù)其相應的特點,重點闡述冗余約束和欠約束兩類繩牽引并聯(lián)支撐的關鍵技術問題。最后,總結分析繩牽引并聯(lián)支撐技術的發(fā)展趨勢。
1 風洞試驗繩系支撐研究現(xiàn)狀
為了減小傳統(tǒng)支撐裝置對風洞流場的干擾,繩系支撐方式被提出,且已廣泛應用于風洞試驗研究。本節(jié)將從國外、國內(nèi)兩個方面論述繩系支撐技術的發(fā)展,并進行相應的分析。
1.1 國外繩系支撐技術
1) 美 國
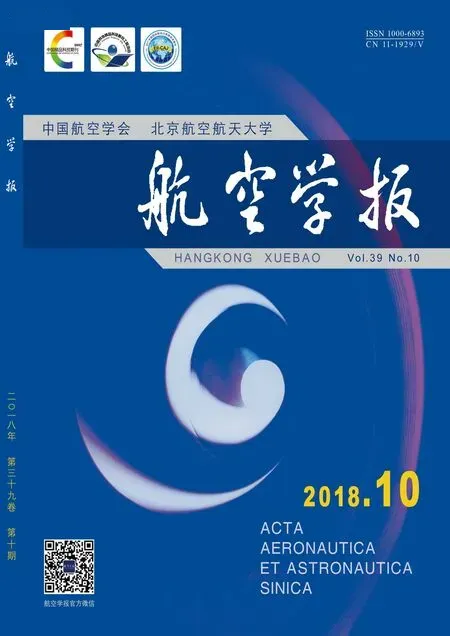
美國NASA蘭利中心較早就提出將繩系支撐方式應用于跨聲速風洞氣動彈性試驗[12-15],如圖1[12]所示的雙繩索懸掛系統(tǒng),以研究飛行器模型的顫振和陣風響應等;并可通過系統(tǒng)辨識技術獲取穩(wěn)定性參數(shù),如靜導數(shù)、動導數(shù)等。
這種雙繩索支撐系統(tǒng)具有“軟”約束的特點,其穩(wěn)定特性可等效于自由飛行狀態(tài)。該支撐可以實現(xiàn)除軸向外的5個運動自由度,整體采用主繩索和輔助繩索,其中主繩索包括位于水平面和垂直面內(nèi)的兩根繩,分別用于調(diào)整縱向和橫向運動;輔助繩索主要起安全保護作用,在正常試驗時保持松弛狀態(tài)。對于這種雙繩索支撐系統(tǒng),其縱向通道和橫航向通道之間的運動是相互獨立的,這也意味著兩根主繩索也是獨立控制。
隨后,美國GD公司研究了一種新型八繩牽引支撐方式(Vane Support System, VSS)[16],如圖2所示,通過內(nèi)置式天平進行氣動力的測量。該結構中的繩索采用翼型截面以減小對流場的影響,通過同步轉動兩側的轉盤實現(xiàn)大范圍的俯仰運動;通過調(diào)整繩索的長度,可以控制滾轉和偏航運動。
美國空軍阿諾德工程發(fā)展中心(Arnold Engineering Development Complex, AEDC)在研究彈體模型的虛擬飛行技術時采用了繩系結合軸承的支撐方式[17-20],以盡可能釋放3個轉動自由度。文獻[17]首先提出采用八繩牽引方式,如圖3(a)所示,八根繩索一端連接在導彈外部的環(huán)狀套管上,另一端與地面支架相連,使導彈模型在俯仰、滾轉方向可以自由轉動,偏航方向可以進行有一定限制的運動。該系統(tǒng)在高速風洞(馬赫數(shù)為0.4~0.6)
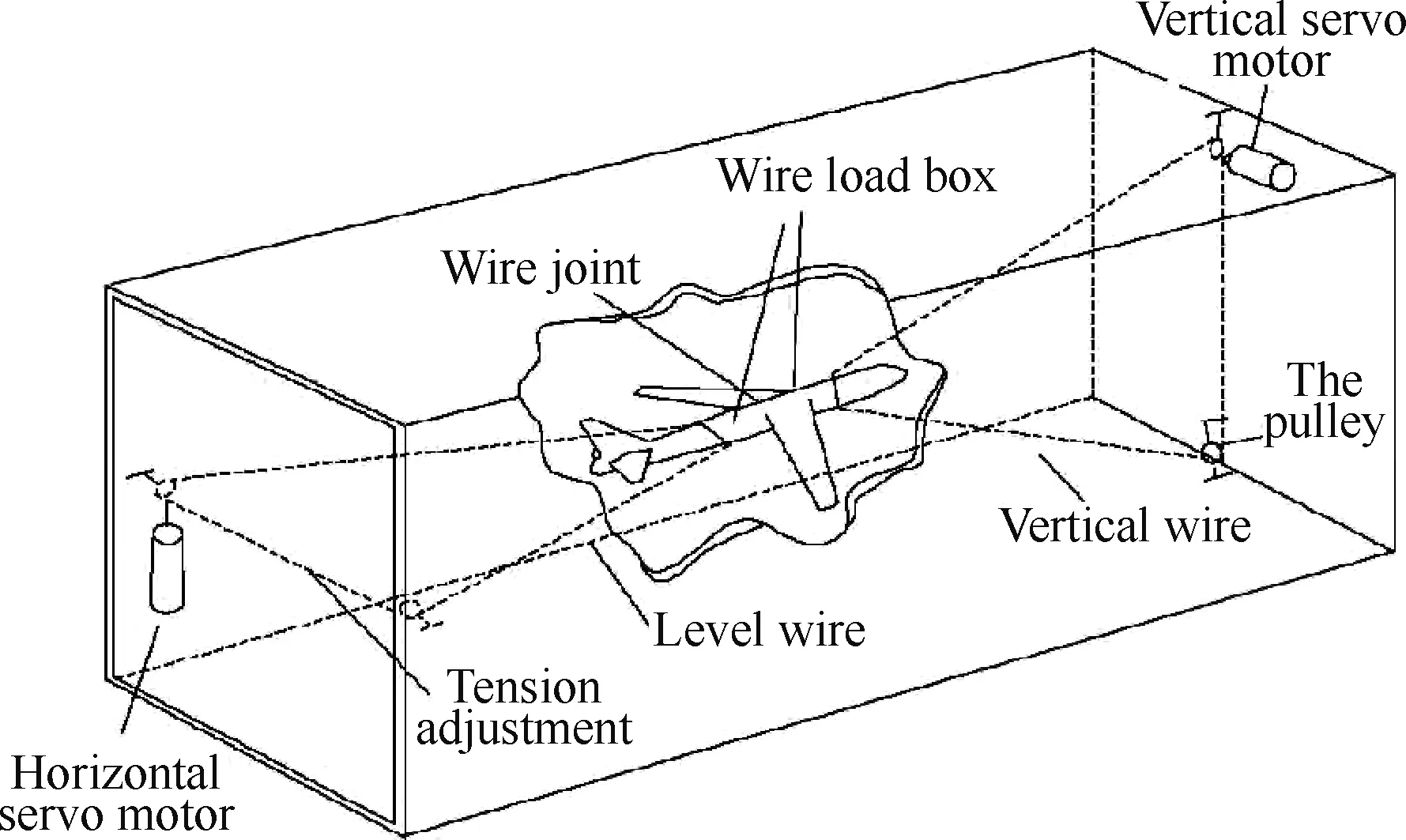
圖1 雙繩索支撐系統(tǒng)[12]Fig.1 Two-cable suspension system[12]
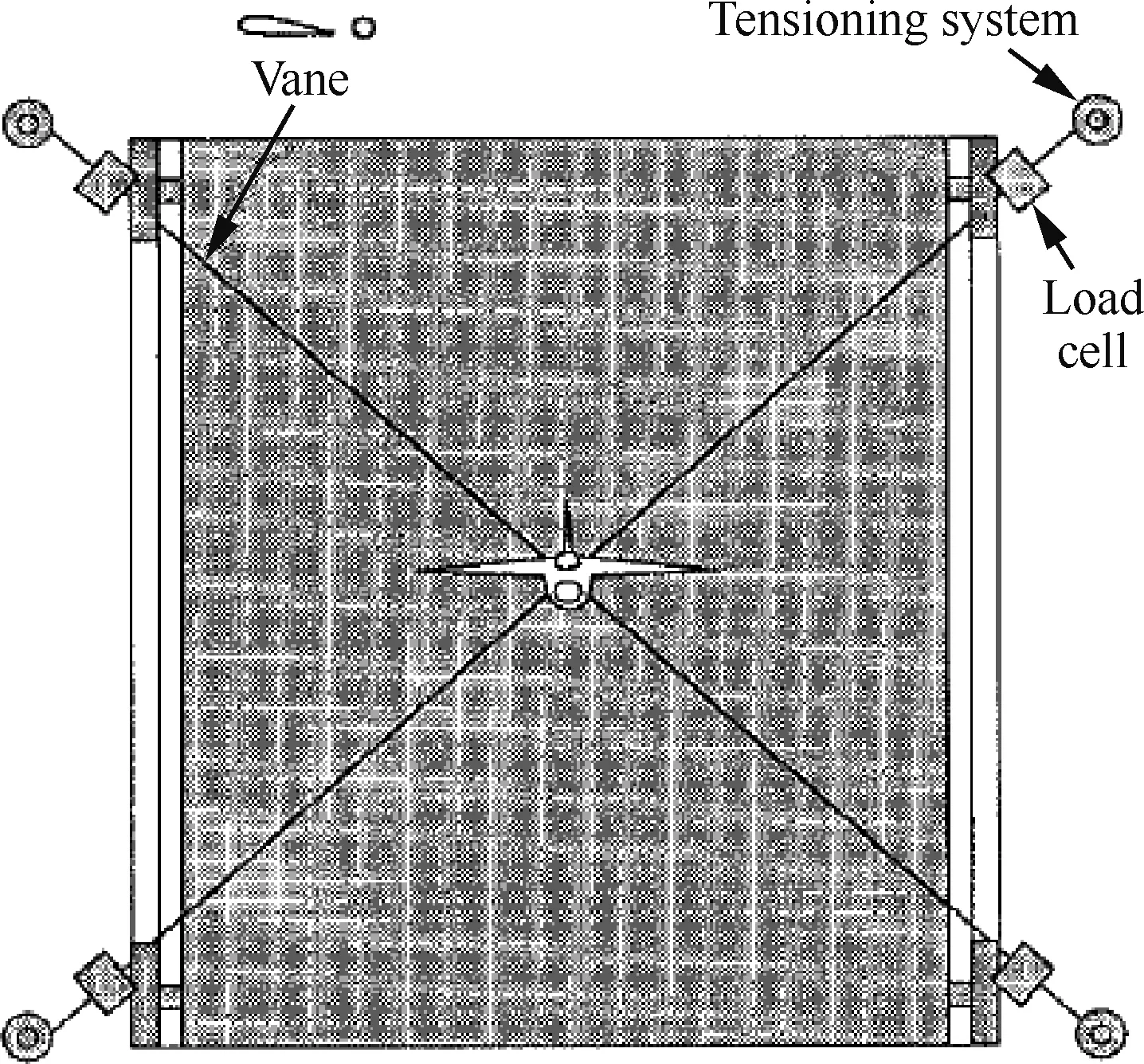
圖2 虛擬飛行試驗牽引支撐方式[16]Fig.2 Vane support system for virtual flight test[16]
中進行了試驗驗證。隨后,為增大偏航運動的范圍,文獻[18]提出了三軸承與六繩牽引方式,如圖3(b) 所示。為進一步減小支撐對流場的干擾,文獻[20]又提出了改進型的六繩牽引方式,如圖3(c) 所示,彈體模型采取分段形式,通過環(huán)組件進行連接。其中,環(huán)組件包括一對滾動軸承和俯仰軸承,以實現(xiàn)自由運動;而通過對繩長的主動控制,可以實現(xiàn)偏航運動。該系統(tǒng)同樣在高速風洞中得到了驗證。
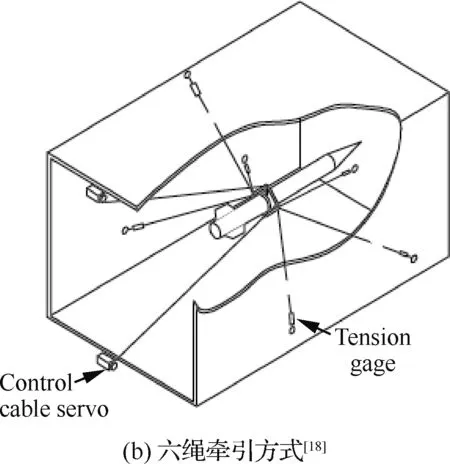
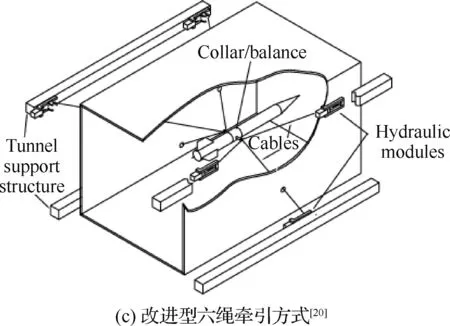
圖3 虛擬飛行試驗彈體模型繩牽引方式Fig.3 Wire suspension system for virtual flight test projectile model
最近,美國喬治亞理工大學Lambert課題組針對一個小尺寸、輕質量的軸對稱鈍體模型(直徑為9 cm、長為16.5 cm、質量為0.53 kg),提出采用一種八繩牽引支撐系統(tǒng)(見圖4[21]),并通過粒子圖像測速(PIV)、熱線儀以及位姿捕獲系統(tǒng)進行了流場綜合分析,重點研究了低速來流下(40 m/s) 模型運動與尾流動力學相互耦合的非定常流動機理[21-23]。該支撐系統(tǒng)雖然可以通過調(diào)整繩長實現(xiàn)模型的六自由度運動,但其運動空間較小,且只是采用運動學方法進行軌跡控制,并未基于并聯(lián)機器人理論考慮動力學因素的影響。
文獻[24]針對一種大尺寸高超聲速模型構建了一套“軟式”支撐系統(tǒng),如圖5所示,即采用尾撐以及4根鋼索前后分布于機身的方式,應用于X-51高超聲速模型的氣動力測量試驗中,得到了模型的升阻力。同樣,在導彈多級分離試驗中,如圖6 所示,分別對不同級采用軟式彈性支撐方式,與氣動力和推進力相比,支撐引起的模型附加力相對較小,因此可視為自由飛行狀態(tài),與其他支撐方式相比具有一定的優(yōu)勢。
2) 俄羅斯
圖4 八繩牽引鈍體模型[21]Fig.4 A bluff body model supported by eight wires driven traverse[21]
圖5 X-51模型“軟式”支撐方式[24]Fig.5 Soft suspension method for X-51 model[24]
俄羅斯中央流體研究院(TsAGI)針對不同風洞以及試驗的特點,廣泛采用了繩系支撐方式[25],但研究成果較少見于文獻。其中比較典型的為應用于T102低速風洞中的繩系支撐方式(見圖7(a)),以及T106與T128亞跨超風洞中的條帶支撐方式(見圖7(b));其新型MC-21民用飛機模型也采用繩系支撐方式在亞聲速風洞中進行了全模顫振試驗(見圖7(c))。
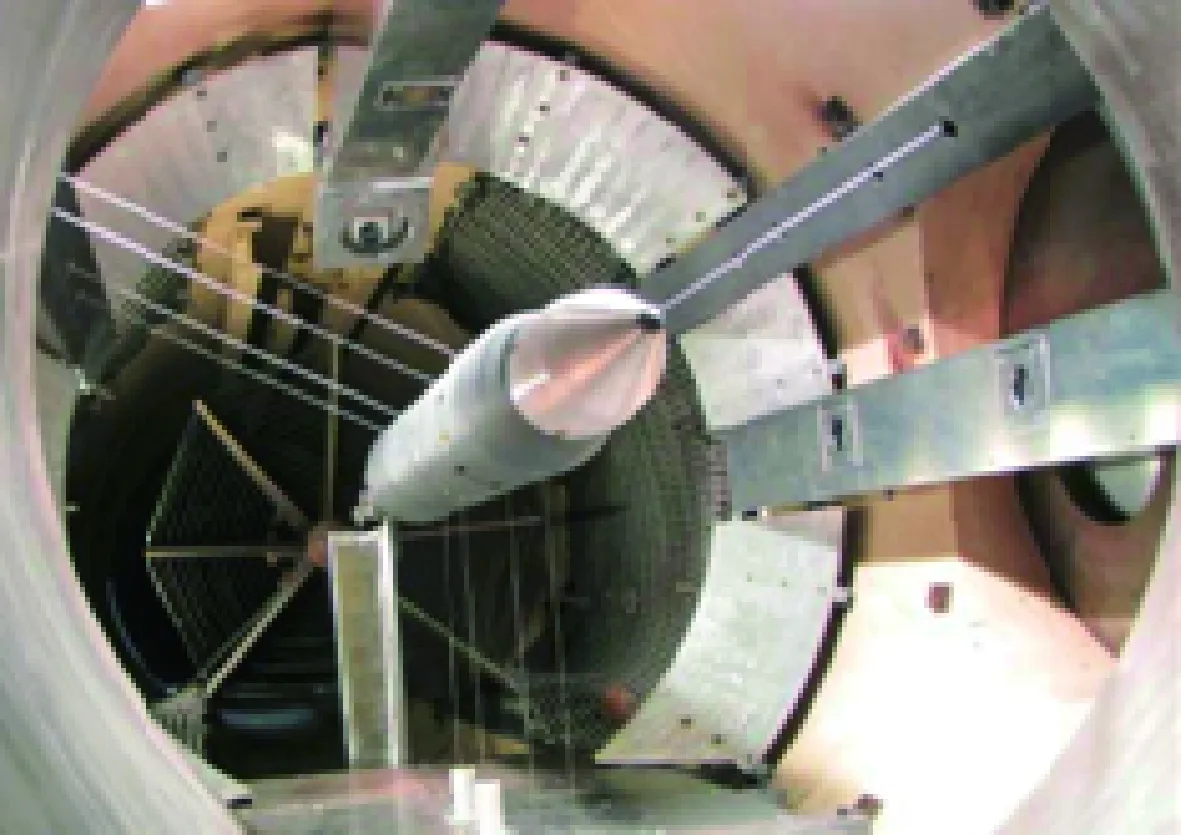
圖6 導彈兩級分離試驗“軟式”支撐方式[24]Fig.6 Soft suspension method for missile stage separation test[24]
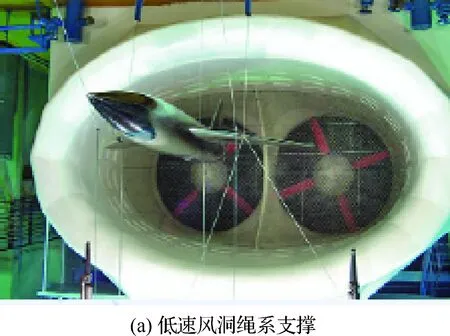

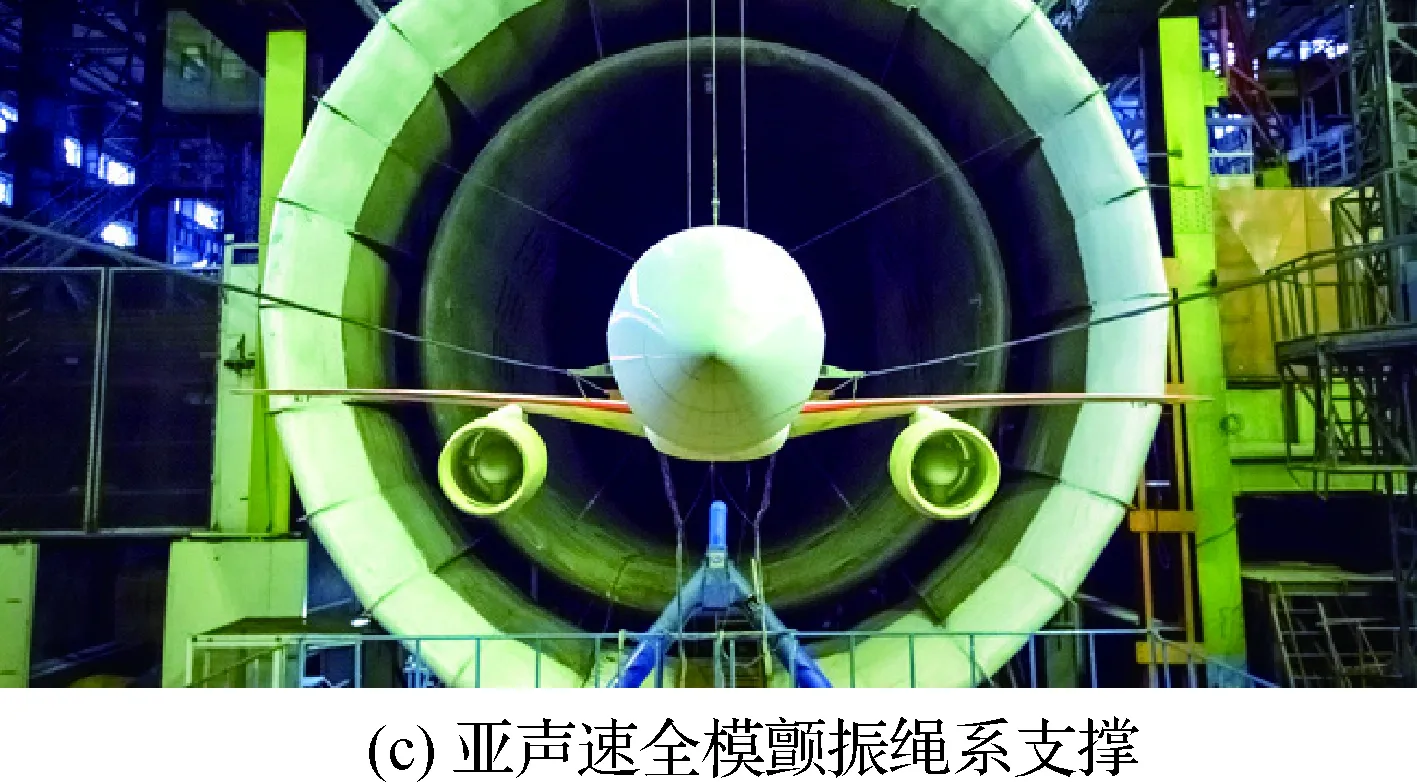
圖7 TsAGI系列風洞繩系支撐方式Fig.7 Wire suspension system in TsAGI wind tunnels
3) 法 國
法國宇航研究局(ONERA)首次提出將繩牽引并聯(lián)機器人技術應用于風洞試驗,并通過建立低速風洞繩牽引并聯(lián)支撐系統(tǒng)(SACSO)開展試驗研究[26-28]。圖8為用于立式風洞試驗的繩牽引并聯(lián)支撐示意圖,它采用9根牽引繩實現(xiàn)六自由度控制,屬于冗余約束系統(tǒng)。該項目研究已開展多年,并明確提出了3種控制方式,即純位置控制實現(xiàn)六自由度強迫運動、純力控制實現(xiàn)六自由度自由運動、力/位混合控制實現(xiàn)強迫+自由運動。
4) 德 國
德國Fraunhofer IPA研究所與杜伊斯堡-埃森大學等對繩牽引并聯(lián)機器人技術進行了廣泛深入的研究,其中后者針對船體模型的風洞試驗,設計了8根繩索支撐方式。但考慮到試驗模型的尺寸和重量,他們對其進行了改進[29],采用固定長度的鋼索,結合線性驅動器與滑軌系統(tǒng),用于模型的支撐,如圖9所示,以測量船體周圍的速度和壓力分布等。該項目將針對重量約100 kg的船舶模型,要求能夠實現(xiàn)振幅為0.5 m、頻率為0.5 Hz的位置運動,以及2.5 Hz的角度運動[30]。目前項目還處于系統(tǒng)優(yōu)化設計階段,為試驗測試做準備。
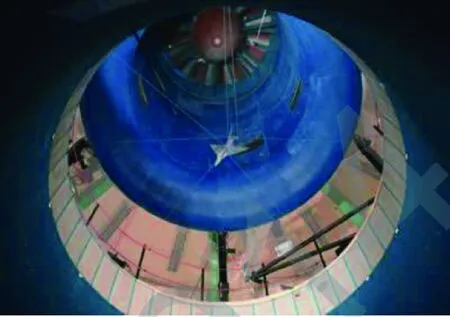
圖8 立式風洞繩牽引并聯(lián)支撐[28]Fig.8 Vertical wind tunnel wire-driven parallel suspension[28]
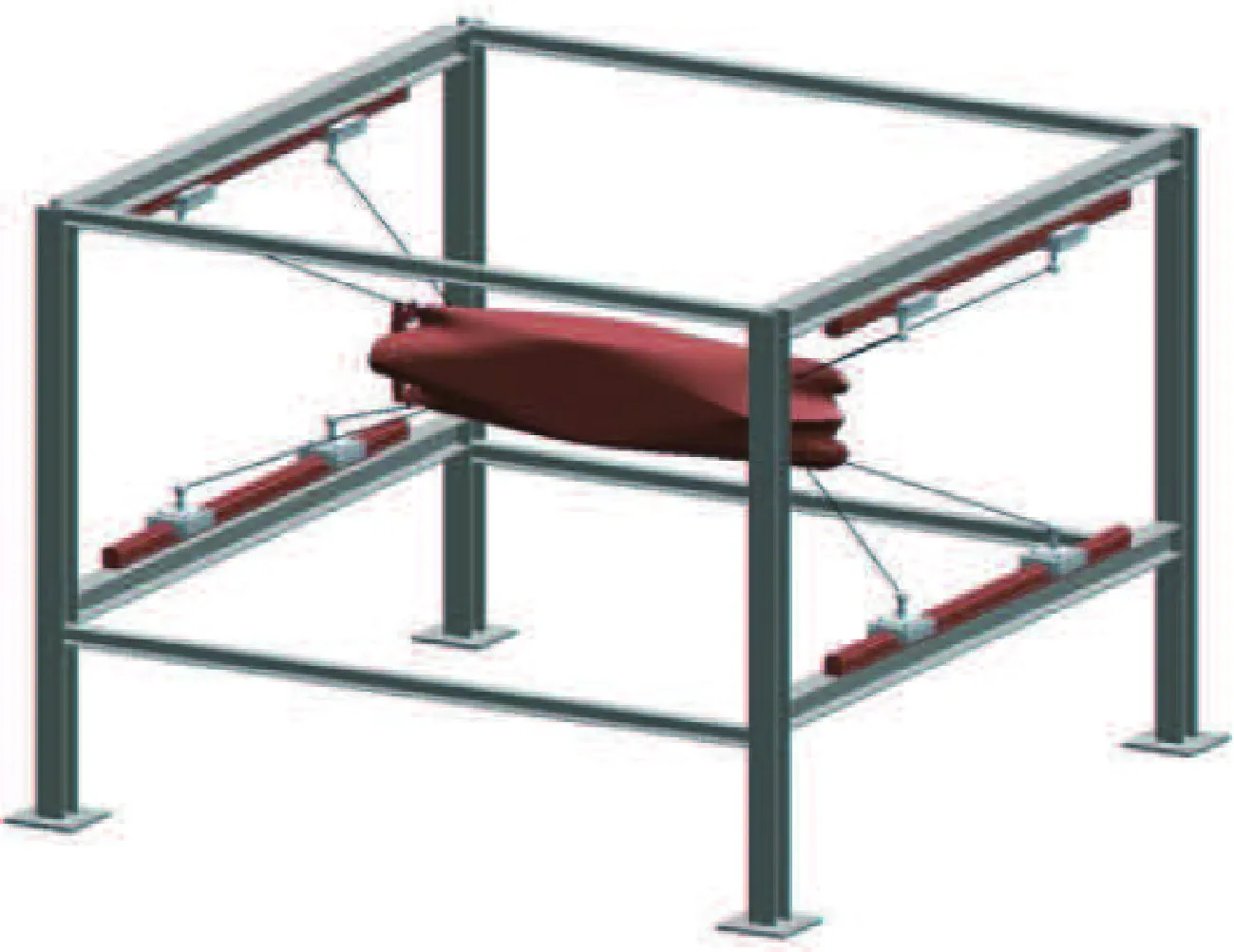
圖9 繩索并聯(lián)牽引船體模型[30]Fig.9 Cable-driven parallel suspension for ship model[30]
1.2 國內(nèi)繩系支撐技術
筆者所在的廈門大學課題組針對繩牽引并聯(lián)支撐技術在風洞試驗中的應用,開展了多年的研究[31-35]。分別采用氣動外形簡單的非標準試驗模型與標準動態(tài)模型(簡稱SDM標模),通過逐步升級測量系統(tǒng)與多軸運動控制系統(tǒng),先后建立了3代原理樣機,并在低速開口式風洞中進行了試驗驗證(見圖10)。
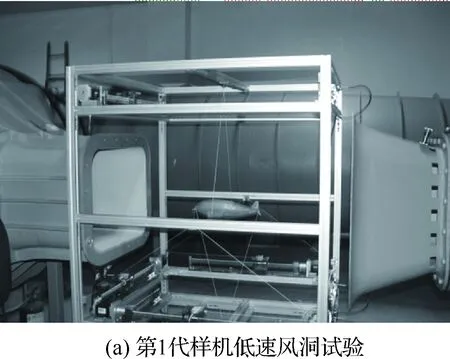
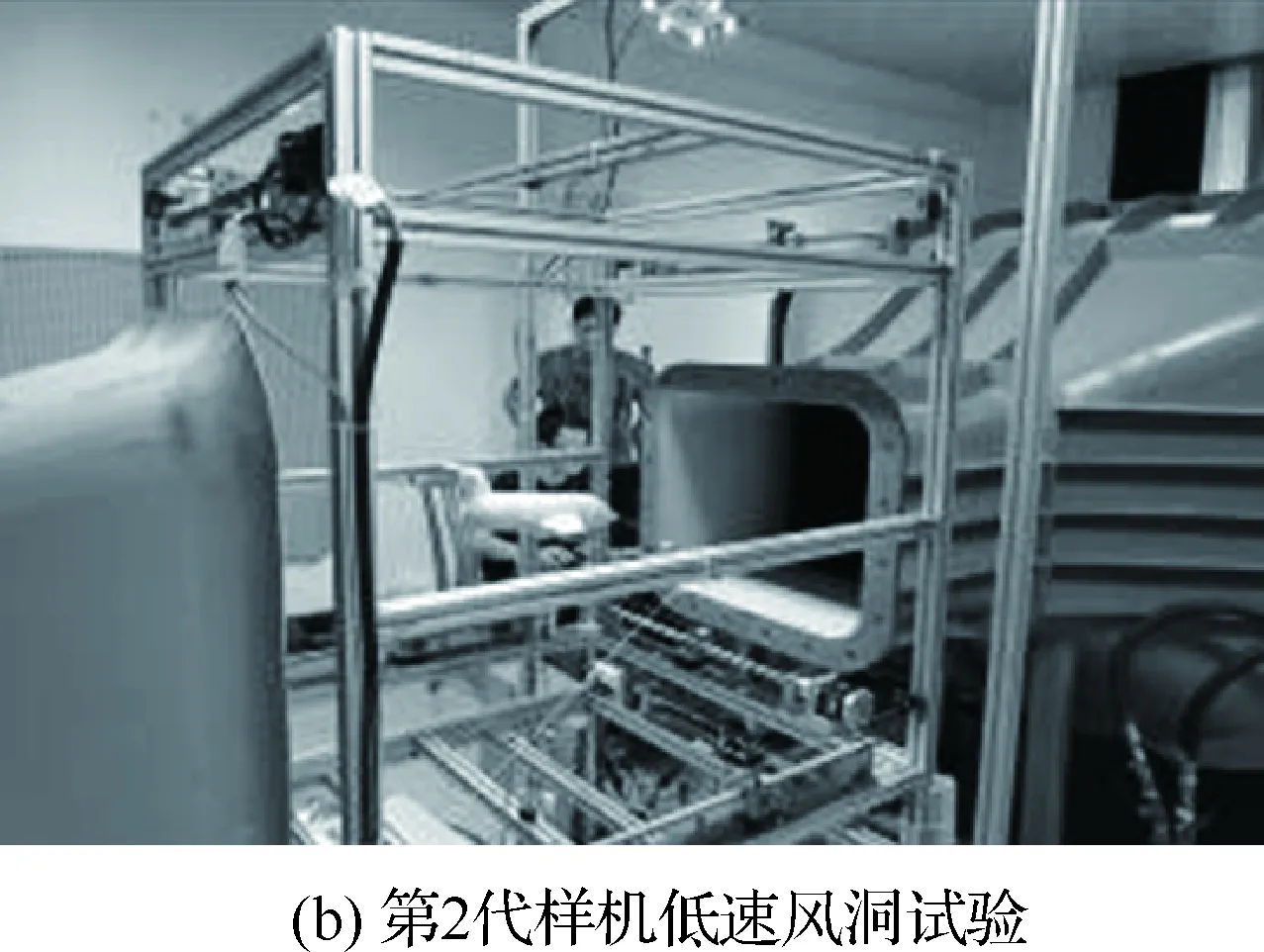
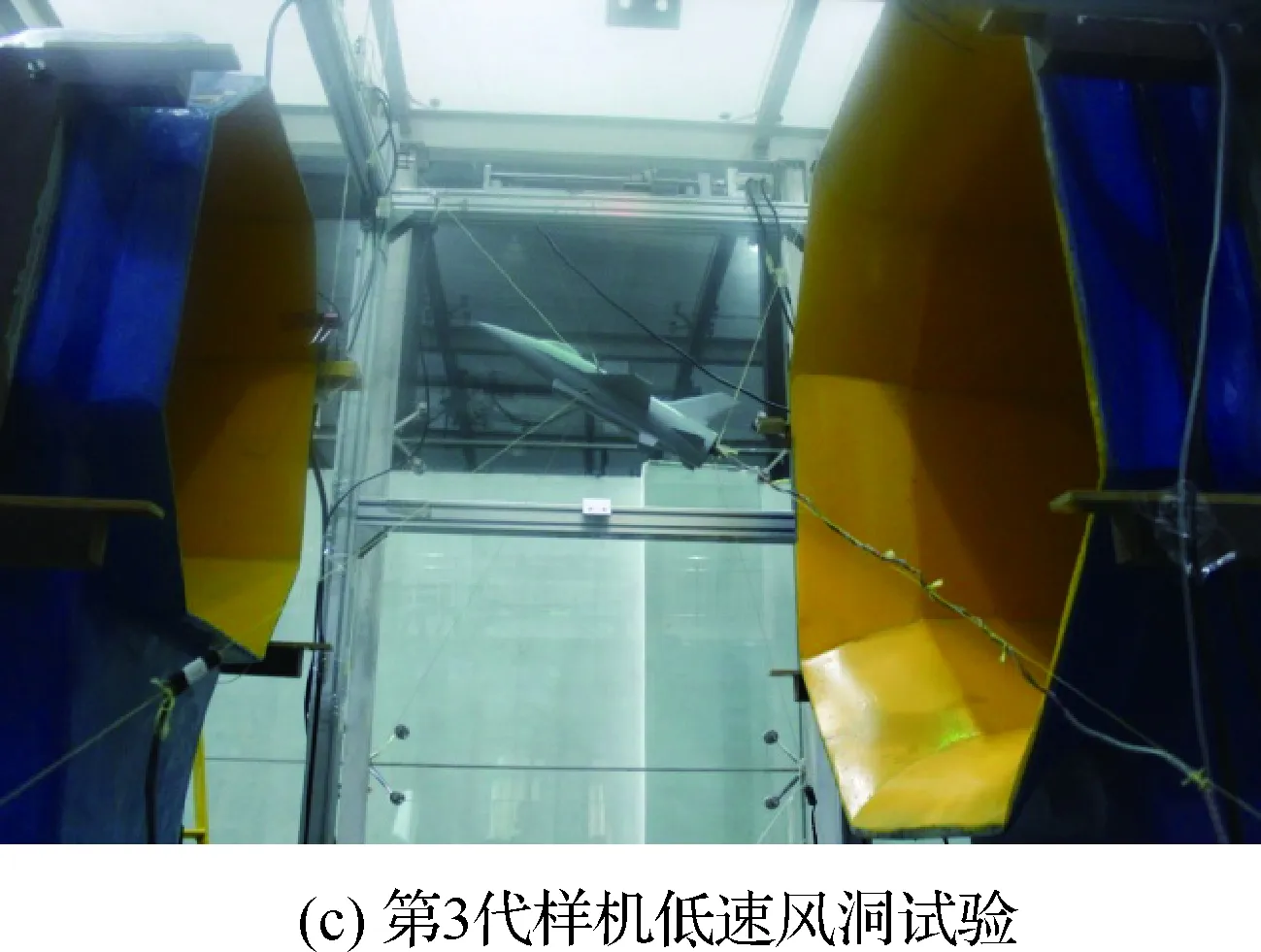
圖10 風洞試驗繩牽引并聯(lián)支撐系統(tǒng)Fig.10 Wire-driven parallel suspension system in wind tunnel tests

圖11 六自由度冗余約束原理樣機Fig.11 Six-DOF redundant constraint prototype
針對SDM標模所構建的第3代原理樣機,如圖11所示,采用八繩牽引的六自由度冗余約束并聯(lián)支撐技術。該支撐系統(tǒng)具體包括機械傳動子系統(tǒng),采用八繩布置方式,通過萬向滑輪,分別連接飛行器模型與電機驅動端;運動控制子系統(tǒng),采用伺服電機、多軸運動控制卡和伺服驅動器,基于并聯(lián)機器人技術的魯棒控制方法,實現(xiàn)對期望軌跡的高精度跟蹤;模型位姿測量子系統(tǒng),采用相機、陀螺儀和加速度計等多種傳感器,通過數(shù)據(jù)融合,實現(xiàn)對模型運動軌跡的高精度動態(tài)測量;繩拉力和氣動力測量子系統(tǒng),對試驗模型設計了內(nèi)式六分量測力天平,以實現(xiàn)對氣動力的實時監(jiān)測。基于剛度與運動空間的聯(lián)合優(yōu)化,該繩牽引并聯(lián)支撐系統(tǒng)可以實現(xiàn)較大范圍的位置運動和角度運動。
課題組通過在低速風洞中進行試驗驗證,實現(xiàn)了常規(guī)靜態(tài)測力試驗、動導數(shù)試驗、非定常振蕩試驗,如大幅值俯仰振蕩、大迎角下的偏航與滾轉耦合振蕩、六自由度運動等,以及大迎角“眼鏡蛇”(Cobra)機動等典型動態(tài)試驗,詳細成果見3.2節(jié)。
除上述繩牽引并聯(lián)支撐在低速風洞中的研究外,文獻[36]以大尺寸高超聲速飛行器X-51A模型為例,通過結構設計,詳細分析了繩牽引并聯(lián)支撐系統(tǒng)的穩(wěn)定性,即在沖擊力作用下模型質心的位移以及繩系拉力的變化;進一步從理論上探討了通過繩拉力解算氣動力的方法,并給出了靈敏度分析,以及對支撐干擾進行了初步研究。文獻[37]以10°尖錐標準模型為例,數(shù)值分析了支撐系統(tǒng)的穩(wěn)定性和氣動干擾特性,并與文獻試驗數(shù)據(jù)對比,在小迎角情況下,繩系支撐引起的氣動干擾相對誤差較小,但會隨迎角的增大而增加。此外,對彎刀支撐和繩牽引并聯(lián)支撐進行了模態(tài)分析,對比了兩種支撐的固有頻率。結果顯示繩系支撐固有頻率較高,系統(tǒng)剛度較大。上述理論研究成果可為繩牽引并聯(lián)支撐技術在超聲速風洞中的應用提供一定的技術支持。
中國空氣動力研究與發(fā)展中心(CARDC)也對繩系支撐方式進行了廣泛研究,其中多用張線支撐系統(tǒng)(Wire Suspension System, WSS)進行描述。
1) 大迎角張線支撐系統(tǒng)
CARDC低速空氣動力研究所研制了一套用于3.2 m亞聲速風洞進行大迎角試驗的張線式支撐系統(tǒng)(見圖12)[38],通過試驗段兩側的張線懸掛架實現(xiàn)對模型迎角的調(diào)整,但其采用的張線組件由兩部分組成,靠近模型內(nèi)側段為直徑5 mm的鋼桿,外側段為直徑20 mm的鋼管。
2) 條帶懸掛內(nèi)式支撐系統(tǒng)

圖12 大迎角張線支撐系統(tǒng)[38]Fig.12 Wire suspension system of large angle of attack[38]
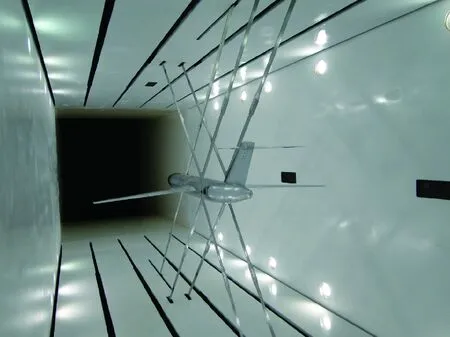
圖13 條帶懸掛支撐系統(tǒng)試驗圖[39]Fig.13 Test photo of vane cable suspension system[39]
為解決傳統(tǒng)支撐方式存在的模型尾部失真、模型易振動等不足,文獻[39-41]研制了條帶懸掛內(nèi)式支撐系統(tǒng),如圖13所示,系統(tǒng)采用靜帶與動帶相結合的方式,其中動帶實現(xiàn)俯仰方向迎角的調(diào)整,靜帶起到增強剛度的作用。支撐系統(tǒng)以標模為例,在2.4 m跨聲速風洞中進行了試驗驗證。結果表明條帶懸掛內(nèi)式支撐試驗運行平穩(wěn),試驗重復性與精準度均良好。但該系統(tǒng)主要實現(xiàn)迎角控制,動態(tài)特性受到一定限制。
3) 懸浮支撐系統(tǒng)
CARDC高速空氣動力研究所研制了懸浮支撐系統(tǒng)(見圖14)[42-44],將其應用于FL-26暫沖式跨聲速風洞中。該系統(tǒng)包括兩根水平方向的主繩索與縱向穿過機翼根部的兩根輔助繩索,具有除軸向外的5個運動自由度,其中水平的主繩索系統(tǒng)控制縱向俯仰通道,豎直的輔助繩索系統(tǒng)控制橫向通道。
中國航天空氣動力研究院針對彈體模型,在低速風洞中研制了一套虛擬飛行裝置,設計了張線與組合滾轉軸承支撐方式(見圖15)[45]。模型在質心位置被8根張線懸掛在風洞中。上下4根張線各連接于同一點,使模型可繞過重心的縱向軸做偏航運動。
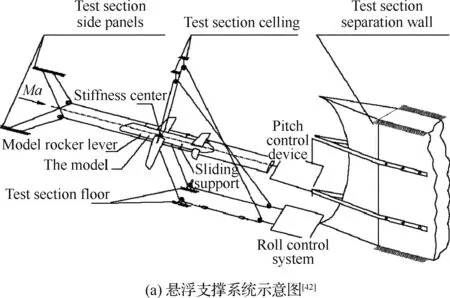
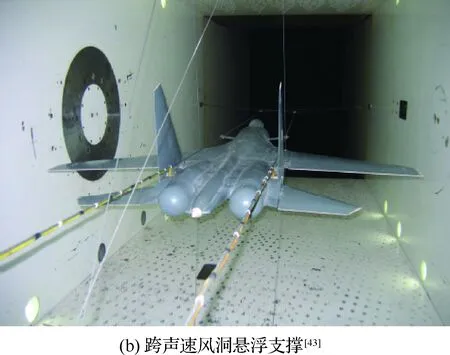
圖14 懸浮支撐系統(tǒng)原理Fig.14 Principle of floating suspension system
航空工業(yè)空氣動力研究院針對民機及大型運輸機等特種布局飛機,開展了高速風洞張線支撐系統(tǒng)的研制[46],開始也采用兩側壁轉窗形式,張線與轉窗內(nèi)的掛架相連。但為滿足支撐的強度與剛度等要求,以及減小對機翼和發(fā)動機短艙的氣動干擾,對原有張線支撐進行了改進,如圖16所示,采用上下對稱的兩個框架,通過內(nèi)嚙合齒輪帶動框架側板上的弧形導軌轉動,經(jīng)由張線實現(xiàn)對模型角度的調(diào)整。
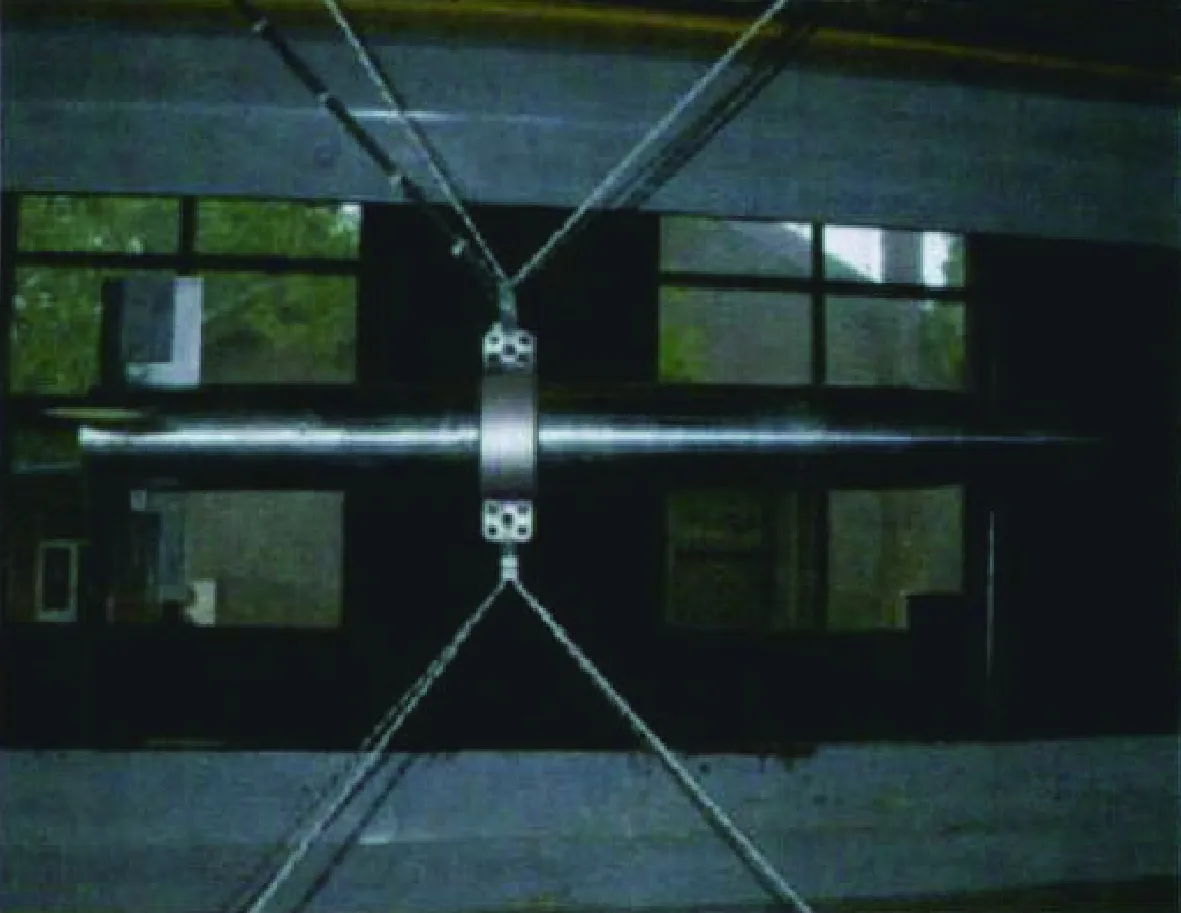
圖15 模型懸掛于風洞中[45]Fig.15 Model suspended in wind tunnel[45]
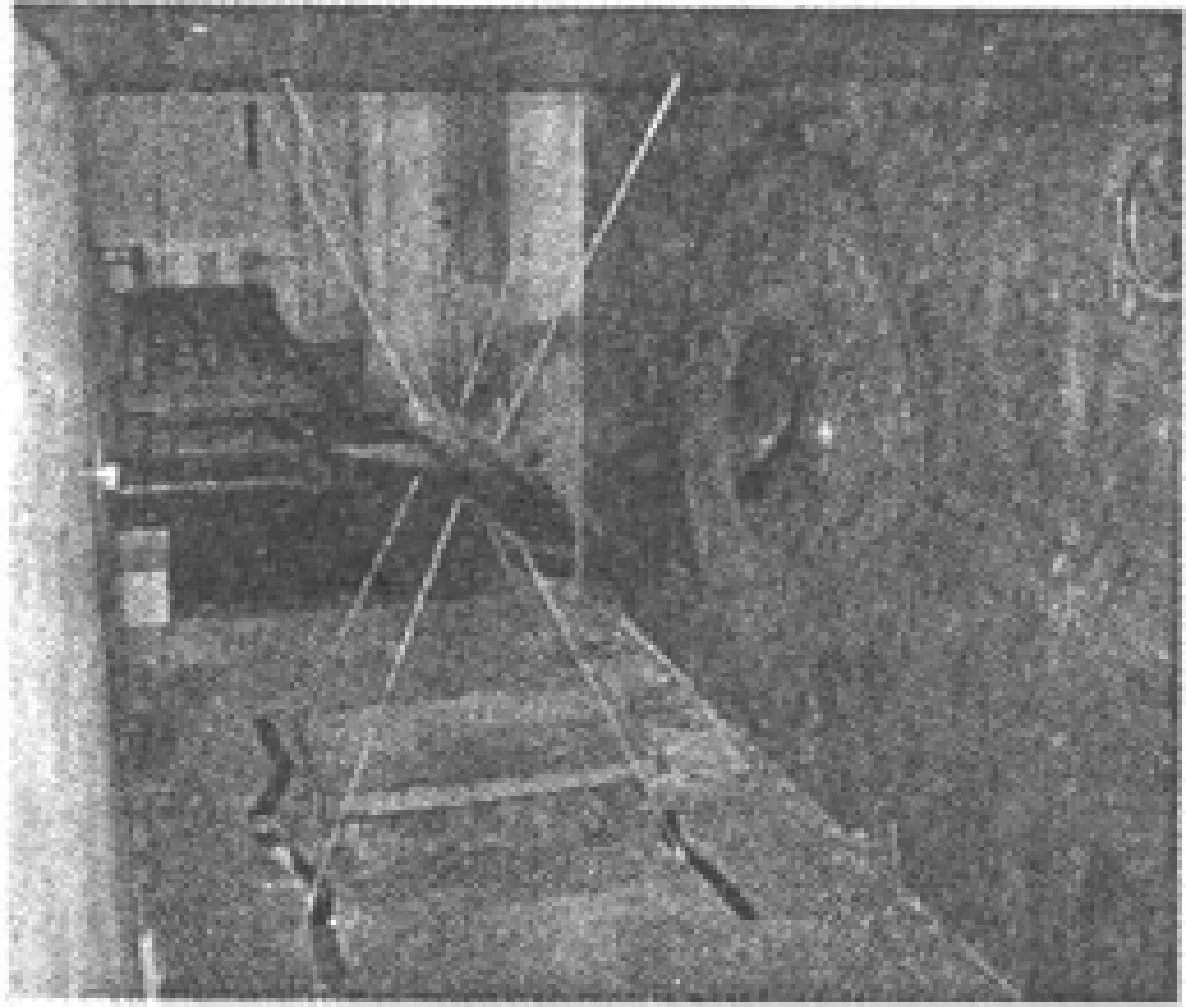
圖16 FL-2高速風洞張線支撐方式[46]Fig.16 Wire suspension system in FL-2 high speed wind tunnel[46]
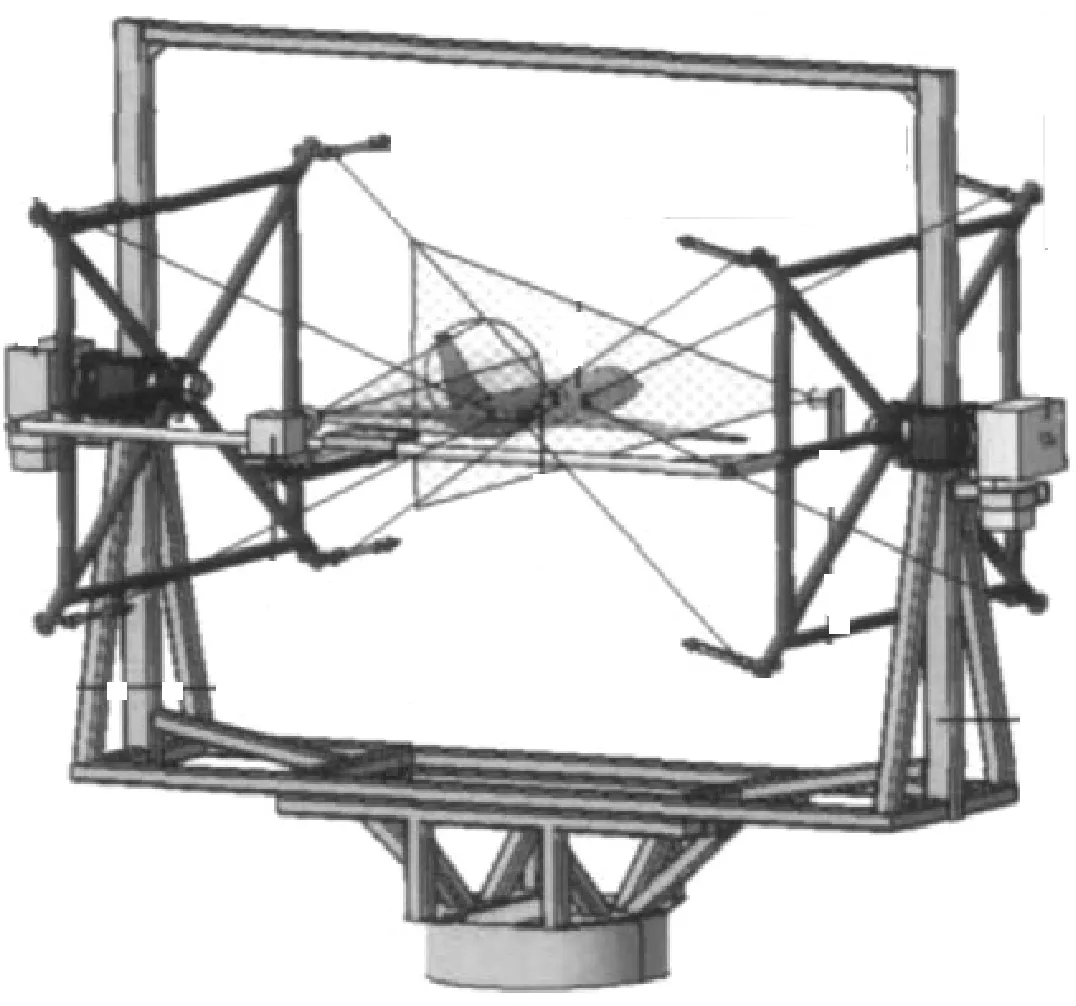
圖17 D4風洞張線支撐機構[47]Fig.17 Wire suspension mechanism in D4 wind tunnel[47]
北京航空航天大學在D4低速風洞中同樣發(fā)展了一套張線支撐系統(tǒng)(見圖17)[47],8根張線與機構兩側旋轉架相連。通過同步驅動位于機構兩側的兩臺步進電機,以實現(xiàn)對試驗模型迎角的控制。
中國兵器工業(yè)研究所針對彈體模型,研究了張線支撐在高速風洞中的氣動力影響規(guī)律,以及張線支撐在高速風洞應用的可行性[48],如圖18所示。主要給出了彈箭模型高速風洞張線支撐總體研究方案和模擬試驗方案,并進行了數(shù)值方法及風洞試驗驗證。結果表明,彈箭模型高速風洞張線支撐干擾試驗方案可行,但張線支撐干擾較大,需要進一步優(yōu)化改進。

圖18 張線支撐彈箭模型示意圖[48]Fig.18 Sketch of wire suspension for missile model[48]
綜上所述,繩系支撐方式已被廣泛應用于風洞試驗,并在低速和高速風洞中得到了驗證。但值得注意的是,雖然多數(shù)繩系支撐機構與繩牽引并聯(lián)支撐方式有關,如張線支撐機構,但它們之間仍有明顯區(qū)別。從機構學角度來看,張線支撐系統(tǒng)并非機器人機構形式,在幾何建模、運動學、動力學分析與控制方面,都與繩牽引并聯(lián)機構不同,無法實現(xiàn)多自由度運動控制,只能進行有限的動態(tài)試驗。
隨著機器人技術與人工智能技術的快速發(fā)展,開展基于繩牽引并聯(lián)機器人的智能支撐技術研究,可為風洞構建新型的模型智能支撐系統(tǒng)提供理論依據(jù)和支持。因此,下文將重點闡述繩牽引并聯(lián)支撐技術。
2 繩牽引并聯(lián)支撐系統(tǒng)分類與特點
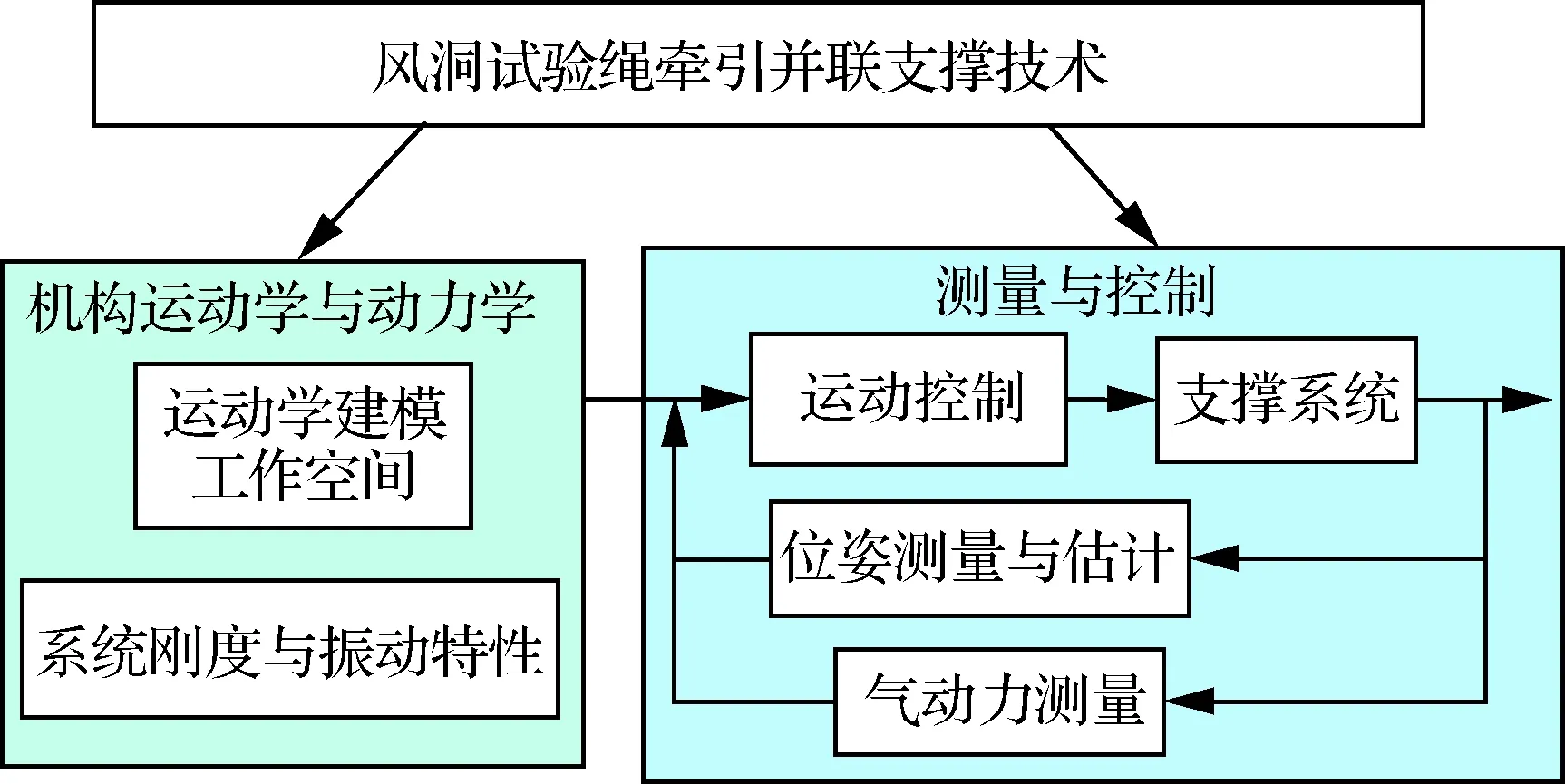
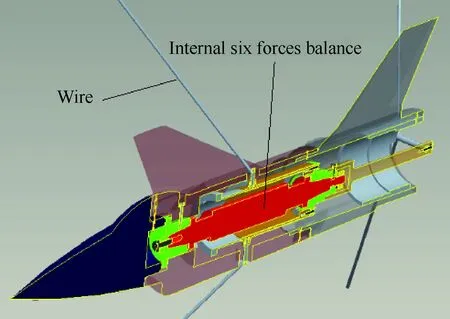
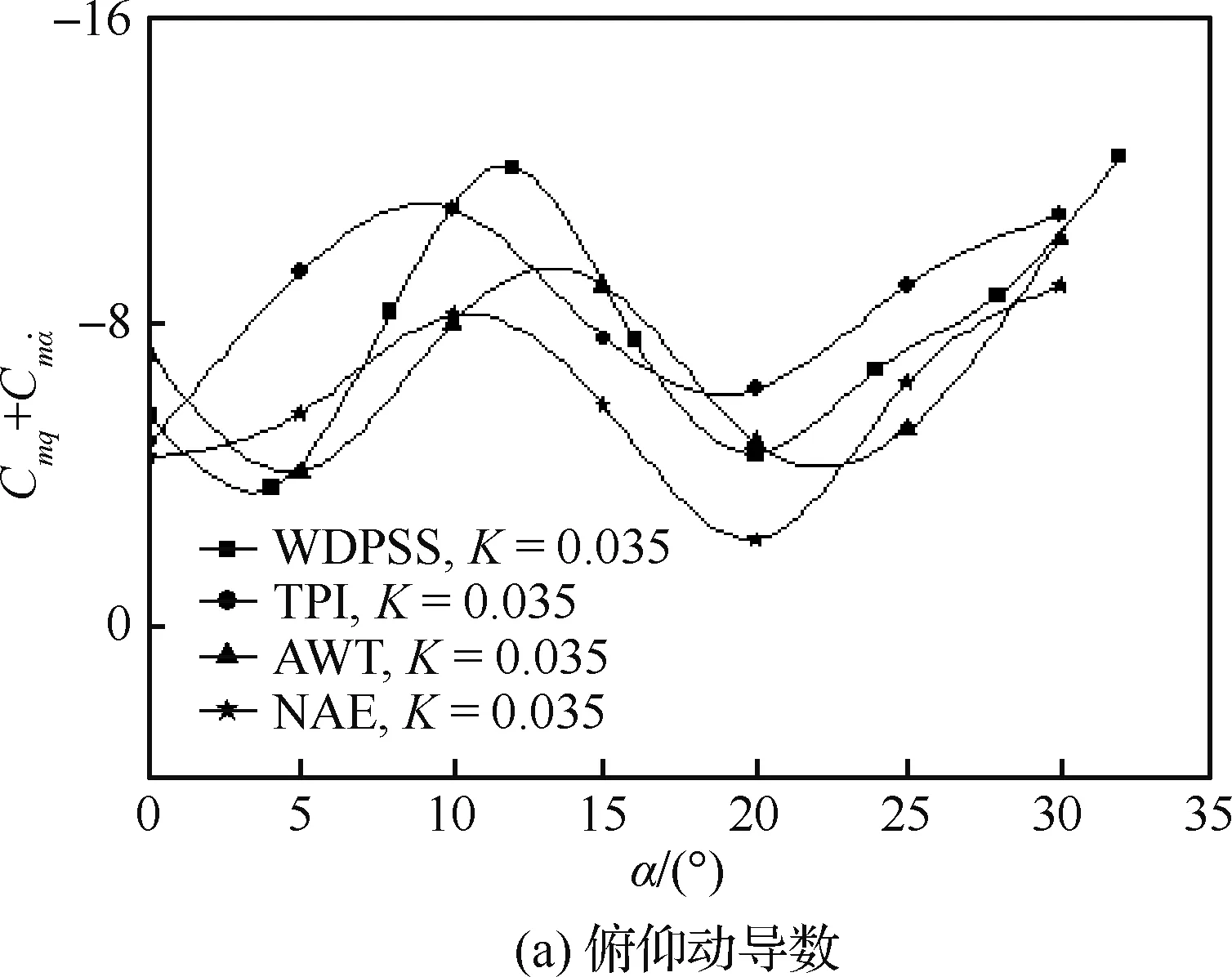
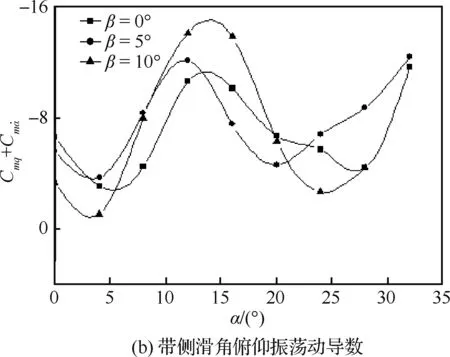
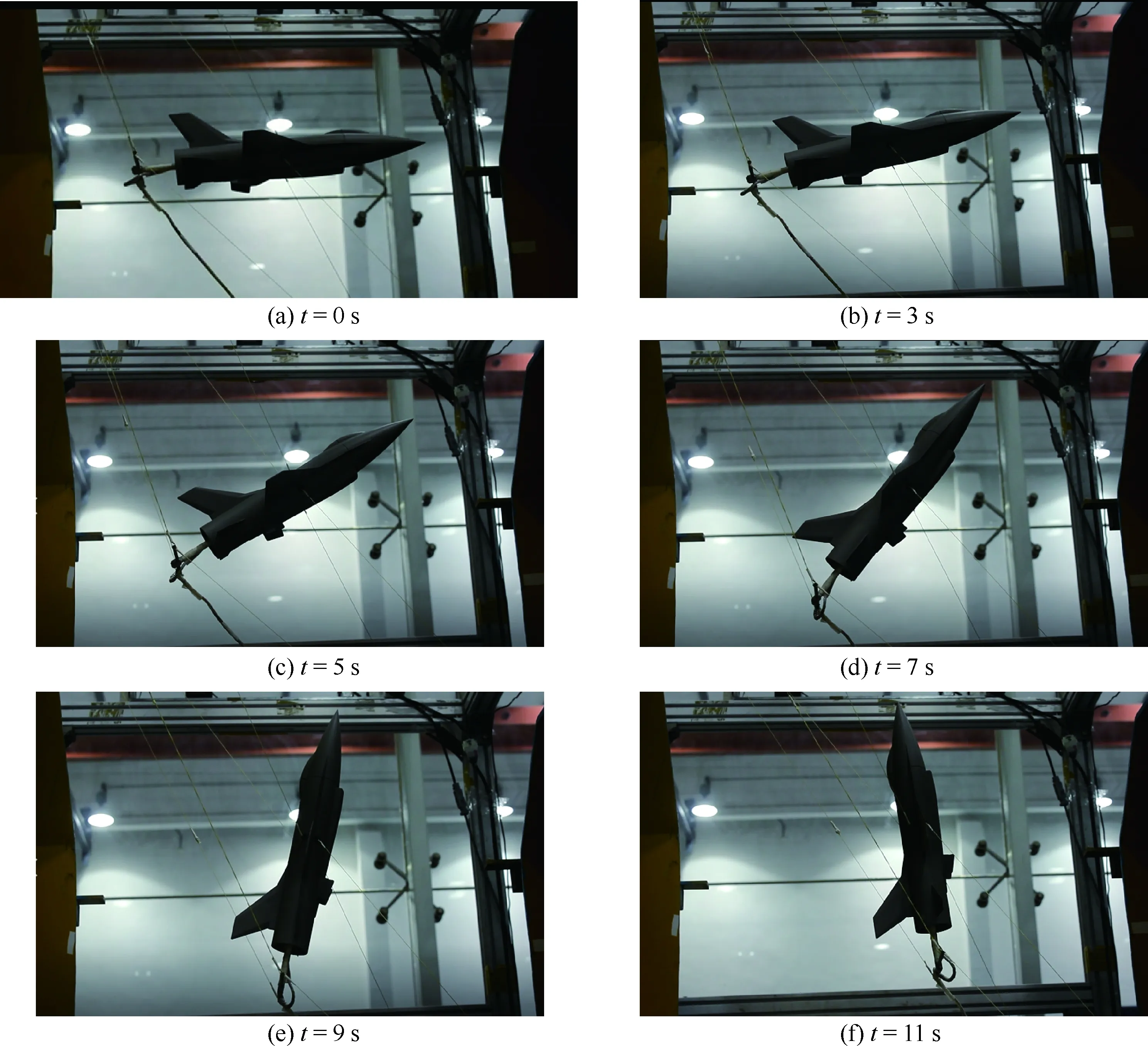
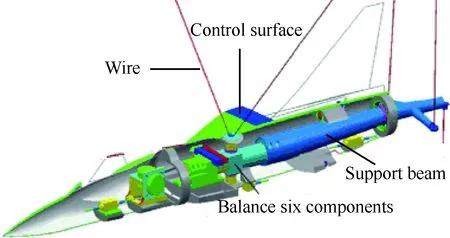
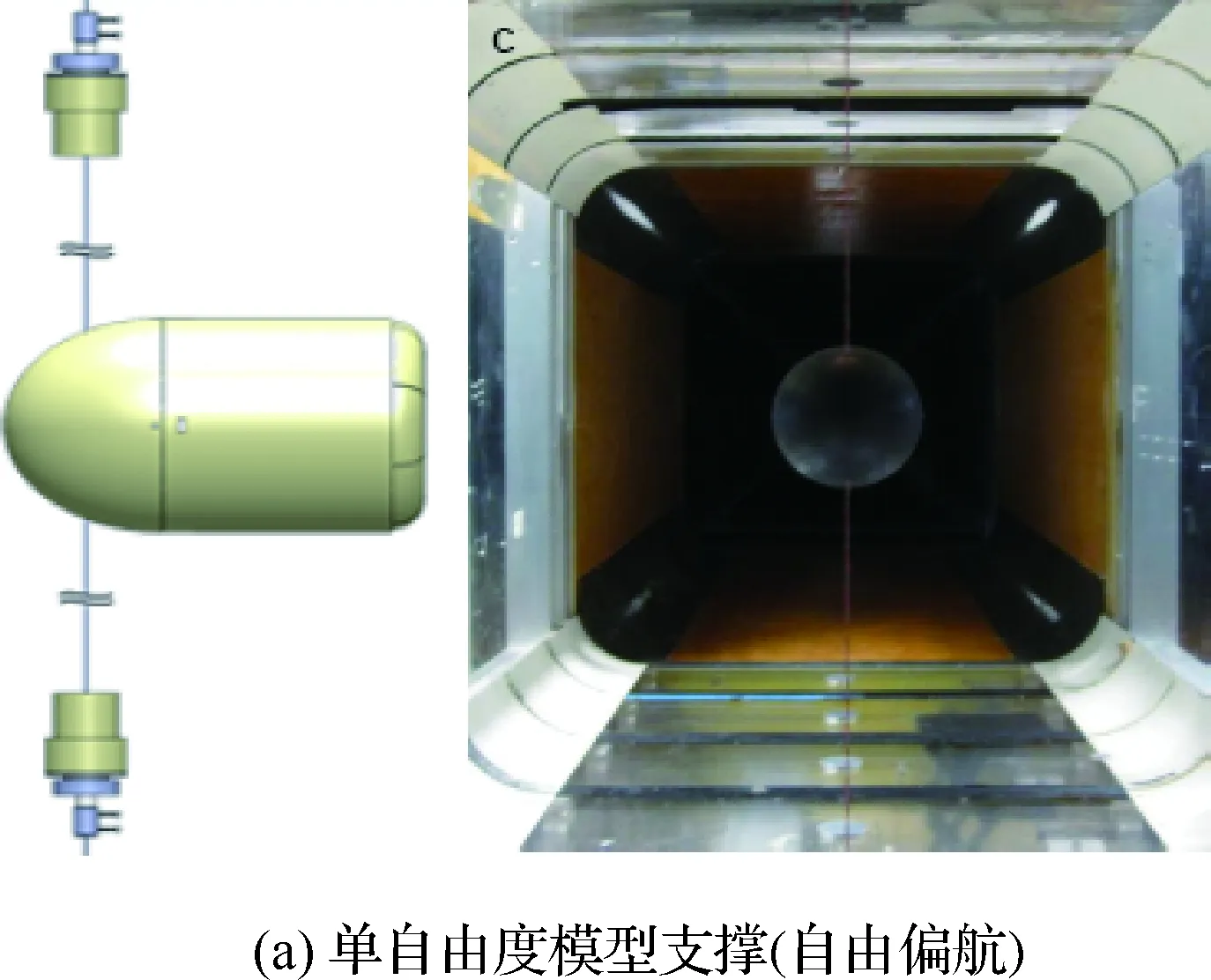
由繩牽引并聯(lián)機構基本理論可知[49],考慮到牽引繩只能承受單向拉力,n自由度繩牽引并聯(lián)機構至少需要m(m≥n+1)根繩牽引。而根據(jù)自由度數(shù)與繩索數(shù)量之間的關系,可進一步將繩牽引并聯(lián)機構分為冗余約束(m>n+1)、完全約束(m=n+1)和欠約束(m 其中,冗余約束和完全約束兩類系統(tǒng)只能實現(xiàn)強迫運動,即只能通過調(diào)整繩長控制飛行器模型的運動軌跡,目前將繩牽引并聯(lián)支撐應用于風洞試驗中的多屬于冗余約束系統(tǒng),但它們一般只用來研究給定運動條件下的非定常氣動力特性,如通過小振幅振蕩預測飛行器的動穩(wěn)定性、通過單自由度俯仰運動來研究動態(tài)失速等,應用范圍比較局限。而欠約束繩牽引并聯(lián)支撐系統(tǒng)的特點恰恰在于當給定繩長時,飛行器模型仍然可動,其位姿不完全確定,留有一定的自由度。換言之,欠約束繩牽引并聯(lián)支撐系統(tǒng)能夠釋放一定的自由度,在給定初始運動指令或通過操縱飛行器舵面,就可以實現(xiàn)某些方向上的自由運動或強迫+自由運動,能夠充分體現(xiàn)飛行器的氣動、運動、控制耦合特性,更接近真實飛行狀態(tài),這無疑在某些特種風洞試驗方面具有很大優(yōu)勢。 冗余約束繩牽引并聯(lián)支撐系統(tǒng)應用于風洞試驗主要是實現(xiàn)飛行器模型的單/多自由度運動,以滿足典型動態(tài)試驗的要求,如動導數(shù)試驗、大迎角大幅值振蕩試驗、升沉俯仰振蕩等。 文獻[51]針對冗余約束繩牽引并聯(lián)機構的若干關鍵技術進行了綜述,初步分析了以下幾方面:結構設計、運動學及性能分析、靜剛度分析、運動控制和力控制等。為滿足風洞試驗的要求,具備高精度運動與試驗測量的能力,冗余約束繩牽引并聯(lián)支撐系統(tǒng)需要攻克諸多關鍵技術,包括運動學建模、工作空間、系統(tǒng)剛度與振動特性、運動控制、位姿測量與估計,以及氣動力測量等,相互關系如圖19所示。 圖19 繩牽引并聯(lián)支撐技術示意圖Fig.19 Sketch of wire-driven parallel suspension technologies 由圖19可知,通過對繩牽引并聯(lián)支撐系統(tǒng)的機構運動學與動力學分析,為飛行器模型的測量與控制做好準備,而后者形成閉環(huán),提高了系統(tǒng)的精度與魯棒性。 3.1.1 運動學建模 冗余約束繩牽引并聯(lián)支撐系統(tǒng)運動學建模關鍵是構建繩長與飛行器模型位姿之間的幾何關系,具體包括運動學正問題,即通過繩長確定飛行器模型位姿;運動學逆問題,即通過飛行器模型位姿確定繩長。考慮到牽引繩的特性,并根據(jù)飛行器模型重量、尺寸,可分為3類情況:① 不考慮彈性,當彈性變形引起的飛行器模型位姿誤差滿足精度要求時可忽略該因素的影響[52];② 只考慮彈性不考慮繩質量,適用于繩質量較小,不計其慣性力的情況[52];③ 既考慮彈性又考慮繩質量,即繩的垂度,如繩索跨度大的支撐系統(tǒng)[53]。根據(jù)繩牽引并聯(lián)支撐系統(tǒng)在風洞試驗中的應用,繩的跨度較小,且與飛行器模型相比,質量較輕,因此可以簡化只考慮繩的彈性因素。 此外,為提高運動學模型的精確性,還需要考慮繩與滑輪連接點的時變特性對繩長、模型位姿的影響,以及有些參數(shù)的不確定性,如傳動摩擦系數(shù)等,具體可以通過標定技術[54-56]或對雅克比矩陣進行在線辨識[57]等方法,以提高運動參數(shù)的精度。 3.1.2 工作空間 針對繩牽引并聯(lián)支撐系統(tǒng)在風洞試驗中的應用,在滿足機構運動約束條件的基礎上,如何分析和優(yōu)化有效工作空間,避免繩索虛牽,以及繩索與飛行器模型之間發(fā)生干涉,將是進行風洞靜態(tài)試驗與動態(tài)試驗的前提。整體而言,有效工作空間必須滿足以下兩個條件[58]: 2) 幾何干涉約束條件,具體包括繩與繩之間的最短距離大于某設定值,以及繩與飛行器模型之間的夾角大于某臨界值。 基于力封閉和幾何干涉約束條件,根據(jù)凸集理論,將凸錐的定義推廣至多維空間,可計算得到支撐系統(tǒng)的工作空間,即在滿足模型所受合力為零且每根繩的拉力均大于零的條件下,去除幾何干涉情況。換言之,可將其轉化為滿足以下條件的所有位姿的集合:由雅克比矩陣J定義的凸包co{J1,J2,…,Jm}包圍原點且剔除幾何干涉的區(qū)域,具體可以采用超平面矢量投影法或雅克比矩陣零空間法進行求解[59-62]。 此外,根據(jù)不同風洞動態(tài)試驗的實際要求,如超大迎角“眼鏡蛇”機動等,可以改變繩系布局方案,進而有效改進飛行器模型的運動空間。 3.1.3 系統(tǒng)剛度與振動特性 繩牽引并聯(lián)支撐系統(tǒng)的剛度與振動特性是設計過程中必須要考慮的問題。系統(tǒng)剛度是指飛行器模型在外力作用下,抵抗質心運動的能力。它是繩牽引并聯(lián)機構的一項重要設計指標,決定了機構在承受負載(尤其是氣動載荷)情況下,系統(tǒng)的穩(wěn)定性、振動特性以及動態(tài)響應特性。 支撐系統(tǒng)的靜力學方程可表示為 W+JTT=0 (1) 式中:T為繩拉力矢量。對式(1)進行變分,可推導得出系統(tǒng)的剛度矩陣K為[63-64] K=G(u,T)+JTKsJ (2) 式中:G(u,T)為雅克比矩陣求導項;u為繩長單位矢量,與飛行器模型位姿有關;Ks為繩的抗拉剛度,與繩的彈性模量有關。 由式(2)可知,系統(tǒng)剛度矩陣不僅取決于牽引繩的拉力與抗拉剛度,還與支撐系統(tǒng)的設計參數(shù),包括牽引繩的幾何布置、飛行器模型的運動位姿等參數(shù)有關。目前,大多研究系統(tǒng)的靜剛度,結合機構布局與繩拉力等參數(shù)的優(yōu)化,對系統(tǒng)動剛度的分析仍將需要繼續(xù)關注。 進一步,考慮系統(tǒng)的無阻尼固有頻率,有 |K-ω2M|=0 (3) 式中:ω為系統(tǒng)固有頻率;M為系統(tǒng)慣性矩陣。文獻[36-37]分別針對大尺度的X-51A模型以及尖錐標模,在一定的機構參數(shù)和繩拉力作用下,進行了剛度與固有頻率分析。結果顯示與傳統(tǒng)的尾部支撐方式相比,繩牽引并聯(lián)支撐具有較好的剛度,以及較大的固有頻率。 此外,考慮到繩牽引并聯(lián)支撐系統(tǒng)在風洞試驗中應用的特點,需要分析系統(tǒng)的流致振動響應特性,包括牽引繩的振動,以及對飛行器模型振動產(chǎn)生的影響。針對繩索的空氣動力問題,文獻[65-69]深入研究了其流致振動特性,包括考慮摩擦和黏性阻尼等影響的渦激振動,以及與雷諾數(shù)相關的阻力失穩(wěn)等,通常采用流固耦合方法數(shù)值求解相互作用力和變形。文獻[70]基于ANSYS-CFX軟件,針對風振影響下單長索的全結構三維模型流固耦合效應進行了多參數(shù)模擬分析。文獻[71] 通過經(jīng)驗公式分析了牽引繩的渦激振動問題,初步研究了牽引繩與飛行器模型的耦合振動,給出了特定條件下繩振動導致的飛行器模型位姿偏差以及繩拉力變化。但綜合不同繩直徑、彈性模量以及來流速度等參數(shù),如何定量分析牽引繩的流固耦合以及支撐系統(tǒng)的耦合振動問題仍需深入研究。 3.1.4 運動控制 由于現(xiàn)代飛行器的精益設計對風洞試驗數(shù)據(jù)的精準度要求越來越高,而氣動參數(shù)如靜導數(shù)、動導數(shù)等都與飛行器模型的位姿緊密相關,因此需要對其運動位姿進行精準的測量與控制。繩牽引并聯(lián)支撐系統(tǒng)實質上是復雜的強耦合、多輸入多輸出、非線性時變系統(tǒng),要實現(xiàn)飛行器模型的高精度多自由度運動,其動力學建模與控制是關鍵。基于牛頓-歐拉法,可以構建系統(tǒng)動力學模型,其矩陣形式可表示為[63] (4) 基于式(4),可以進行系統(tǒng)動力學分析與控制研究。繩牽引并聯(lián)支撐系統(tǒng)的控制策略可以分為兩類,即連接空間或驅動空間的控制,以及任務空間的控制。在第1種控制策略中,被控量是繩索的長度或驅動電機的轉角。如Fang等基于繩索長度,采用非線性前饋控制方法,并對張力進行最優(yōu)分布,以補償動力學誤差[72]。對該類控制策略而言,盡管繩索的長度或電機的轉角可以由編碼器測量,進而通過正運動學分析得到模型的位姿,但由于繩索的柔性以及正運動學方程解的不確定性將導致位姿精度降低,并限制了控制器的帶寬。在第2種控制策略中,被控量是模型位姿。如Chellal等針對索并聯(lián)機構采用基于視覺測量的串級控制方案,其中力控制保證繩索張力的合理分配,位置控制保證定位精度,但只是運動學控制,未考慮系統(tǒng)的動力學特性[73]。文獻[74]針對用于射電望遠鏡粗調(diào)系統(tǒng),提出了一種Fuzzy-PID控制和干擾觀測器相結合的控制算法來實現(xiàn)饋源軌跡跟蹤策略。文獻[63]針對已構建的原理樣機,實現(xiàn)了半閉環(huán)運動學控制,并采用基于剛度優(yōu)化的內(nèi)力前饋與PD反饋控制方法,進行了控制性能分析;在此基礎上,文獻[75]提出了一種連續(xù)非奇異終端滑模控制方法,并進行了仿真驗證。 由上述可知,基于繩索長度或電機轉角反饋的控制策略屬于半閉環(huán)控制;采用視覺測量以位姿為反饋量的控制策略雖是全閉環(huán),但文獻[57,73]僅實現(xiàn)了運動學控制,還未實現(xiàn)系統(tǒng)的全閉環(huán)動力學控制。因為運動學控制不基于系統(tǒng)的動力學模型,沒有考慮非線性及耦合等特性,導致控制器的實際性能不高。特別是在飛機模型快速動態(tài)變化情況下,非線性動力學特性更加明顯,運動學控制器不能滿足性能需要,出現(xiàn)運動不穩(wěn)定的現(xiàn)象。此外,在控制器設計時應考慮繩索張力的動態(tài)變化,將張力和位姿混合控制。尤其在試驗來流作用下,應避免飛行器模型運動過程中牽引繩松弛發(fā)生“虛牽”現(xiàn)象,否則將嚴重影響氣動參數(shù)的測量結果。同時,系統(tǒng)運動學參數(shù)如繩索與滑輪接觸點位置變化、繩索彈性對計算長度的影響等都會引起雅克比矩陣的不確定性,將導致系統(tǒng)魯棒性能變差。因此,設計具有魯棒性且考慮系統(tǒng)動力學特性的力位混合控制器是關鍵。 值得注意的是,在控制率設計過程中應對繩拉力進行動態(tài)優(yōu)化,盡管有文獻采用線性規(guī)劃、二次型規(guī)劃等方法[76-79],但卻存在繩拉力不連續(xù),以及計算時間較長等不足。結合繩索的振動響應,在滿足系統(tǒng)剛度要求的前提下,采用快速連續(xù)性的優(yōu)化算法仍將是研究重點。 3.1.5 位姿測量與估計 在風洞試驗中,飛行器模型的位姿測量精度直接影響氣動參數(shù)的精準度。對繩牽引并聯(lián)支撐系統(tǒng)而言,它還影響模型的運動控制精度。因此,高精度的位姿測量與估計是獲得準確可靠的氣動特性試驗數(shù)據(jù)的基礎。 結合繩牽引并聯(lián)支撐的特點,非接觸測量是一種有效的手段。目前,國內(nèi)外研究機構已發(fā)展了激光光柵法和視覺(視頻)測量方法[80-81],其中因為視覺測量技術對模型設計無特殊要求,受到風洞試驗機構的青睞,已成為研究熱點。國外,美國從20世紀末開始研究該項技術,現(xiàn)已應用于各種低速、高速、超高速風洞試驗模型的姿態(tài)角測量[82]。國內(nèi),中國空氣動力研究與發(fā)展中心等多家單位開展了姿態(tài)角視覺、視頻測量技術,迎角實測精度可達0.01°[83]。廈門大學采用機器視覺測量技術,使用單目、雙目相機,將其針對性地應用于飛行器模型的位姿測量,目前已能夠獲得較高的測量精度[84]。 為保證動態(tài)測量的實時性,還需對測量位姿進行估計,可以采用多種濾波方法[85],如基于貝葉斯狀態(tài)估計理論的粒子濾波,通過對運動目標圖像和特征的提取與配準,可以實現(xiàn)對模型狀態(tài)的預測與更新。目前,基于三維圖像的視覺測量與估計技術已有較大發(fā)展,例如基于RGB-D(Depth)相機,結合平面圖像與深度信息,通過配準與優(yōu)化可以得到被測對象的位置和姿態(tài)[86-87],且具有較高的精度與效率,這將為風洞試驗飛行器模型位姿的測量提供一種有效手段。 總之,結合繩牽引并聯(lián)支撐在動態(tài)試驗中的具體應用,如何保證測量的精度以及實時性仍將是值得關注的關鍵問題。 3.1.6 氣動力測量 常規(guī)風洞試驗的目的是獲得飛行器模型的空氣動力載荷,通常采用六分量天平直接測量作用在模型上的力和力矩。針對繩牽引并聯(lián)支撐在風洞試驗中的應用,測量氣動力的關鍵是進行內(nèi)置六分量天平設計。文獻[35]提出“模型-天平-支桿”一體化設計方案,如圖20所示,包括模型、天平、套筒和支桿4大組件,天平兩端分別固連前錐套和后錐套,前錐套固連于模型,后錐套固連于套筒;支桿也固連于套筒,用于連接繩索。套筒、支桿與模型之間無接觸,模型僅通過前錐套與天平接觸固連。這樣天平所測得的載荷即是通過模型傳遞的,與套筒、支桿無關。 圖20 SDM內(nèi)置六分力天平示意圖[35]Fig.20 Sketch of internal six force balance for SDM 除了內(nèi)式六分量天平測量方法,鑒于繩牽引并聯(lián)支撐的特點,基于系統(tǒng)靜力平衡方程,可以通過吹風前后繩拉力的變化解算飛行器模型受到的氣動力及力矩,具體可以表示為 (5) 式中:Fe、Me分別為模型在吹風試驗時所受的氣動力和氣動力矩;T0和TW為吹風前后繩系的拉力矢量;Fex、Fey、Fez分別為模型所受的阻力、側向力及升力;Mex、Mey、Mez分別為流場作用在模型上的滾轉力矩、俯仰力矩及偏航力矩。文獻[21,34]已采用上述方法通過試驗驗證得到氣動力參數(shù),結果顯示是合理正確的。 文獻[36]進一步提出,在進行風洞動態(tài)試驗時,基于系統(tǒng)動力學方程,氣動力參數(shù)可由式(6)求解: (6) 式中:ΔT為吹風前后的繩拉力變化。式(6)意味著通過對繩拉力的監(jiān)測,以及模型運動位姿的測量,可以使得復雜的氣動/運動耦合問題解耦,進而得到模型所受的氣動參數(shù)。 除上述關鍵技術外,在實際風洞試驗應用時,還需考慮繩索與飛行器模型之間的連接問題,尤其在高速、超聲速來流下,氣動力和繩索張力均變大,應避免連接處應力集中被拉斷。此外,如果吹風時間較長,還需考慮超聲速來流導致的高溫對繩索材料的影響,包括強度和繩拉力特性等,并依據(jù)此分析選擇性能更優(yōu)的材料。 目前,筆者只查到文獻[21,35]公開發(fā)表了繩牽引并聯(lián)支撐風洞試驗的相關成果。為更具普適性,這里以SDM標模為例進行說明。文獻[35]在某開口式直流低速風洞進行動態(tài)試驗,均勻流速范圍達5~80 m/s。為確保SDM模型處于風洞試驗段中心流場區(qū),實際樣機裝配如圖21所示,其中圖21(b)為大迎角狀態(tài)。 圖21 繩牽引并聯(lián)支撐風洞試驗Fig.21 Wire-driven parallel suspension in wind tunnel test 圖22 繩牽引并聯(lián)支撐SDM標模動態(tài)試驗結果Fig.22 SDM dynamic test results of wire-driven parallel suspension 此外,根據(jù)對繩牽引并聯(lián)支撐系統(tǒng)的工作空間和剛度分析,對系統(tǒng)進行重構,還進行了大角度的“眼鏡蛇”機動動作,如圖23所示,t為動作時間。由試驗過程可知,支撐系統(tǒng)即使在大迎角機動情況下仍保持了較好的穩(wěn)定性。 圖23 繩牽引并聯(lián)支撐Cobra機動試驗Fig.23 Cobra motion test with wire-driven parallel suspension 由第3節(jié)可知,冗余約束繩牽引并聯(lián)支撐技術發(fā)展相對成熟,而在欠約束方面的研究相對較少,主要是由于其約束不足、剛度低,以及運動幾何與靜力學、動力學存在耦合等,限制了它的應用,但這也意味著欠約束繩牽引并聯(lián)機構具有高度的靈巧性與自適應性。考慮到風洞試驗在自由運動、強迫+自由運動以及氣動/運動/控制耦合等方面遇到的技術瓶頸,采用欠約束繩牽引并聯(lián)支撐是一種理想的選擇。 目前,關于欠約束繩牽引并聯(lián)支撐在風洞試驗中的應用,比較相關的有法國ONERA在立式風洞中采用這種支撐方式,通過控制每根繩的拉力,利用其合力來模擬發(fā)動機的推力,以實現(xiàn)自由飛行試驗。該風洞已具備此功能,可以為研究飛行器或操縱面運動與氣動力之間的耦合關系提供試驗基礎[88]。其中飛行器模型包含3個操縱控制面,但需結合具體的欠約束構型,并進行試驗規(guī)劃才能夠使用。圖24為此項目采用的飛行器模型與支撐結構示意圖[88]。此外,該項目還提出了一種力位混合控制方法,可以實現(xiàn)在某些自由度上的受迫運動,以及剩余自由度上的自由運動,但根據(jù)公開文獻,上述兩部分均未涉及具體的繩系布置方式。 美國喬治亞理工大學采用一種兩根繩支撐方式,重點研究了低速來流時單自由度軸對稱體的自由響應,多個射流激勵器作用下近尾跡流場結構,以及基于振動位移測量的開/閉環(huán)流動控制器對氣動力的影響[22]。支撐系統(tǒng)如圖25(a)所示,其可以實現(xiàn)自由偏航轉動。該支撐方式要求試驗模型重量較輕,鋼絲繩預緊力可通過電機或螺栓進行調(diào)節(jié)。此外,他們還提出了一種三自由度自由轉動模型支撐機構,如圖25(b)所示,以研究不同流動控制方法對自由運動的影響。但該機構主要采用一根前置桿與萬向節(jié)實現(xiàn)自由運動,與欠約束繩牽引支撐方式相差較大。 圖24 飛行器模型和支撐結構[88]Fig.24 Aircraft model and structure of suspension[88] 圖25 自由運動模型支撐結構[22]Fig.25 Structure of model suspension with free motion[22] 欠約束繩牽引并聯(lián)支撐技術應用于風洞動態(tài)試驗,主要是進行自由運動,即在不改變繩長的條件下,受外力作用或操縱舵面,飛行器模型在解鎖自由度上運動;以及強迫+自由運動,即在外力作用下同時控制繩長變化,在約束自由度上按照指定軌跡運行,在解鎖自由度上自由運動。其關鍵技術問題雖與冗余約束有共性之處,但亦有區(qū)別,其中有兩個問題需要重點解決,即系統(tǒng)的動態(tài)特性與控制技術。 4.2.1 系統(tǒng)動態(tài)特性 從本質上講,其動態(tài)特性主要研究飛行器模型位姿與繩長、繩拉力之間的內(nèi)在關系,以及振動特性等。與冗余約束支撐系統(tǒng)不同,欠約束支撐系統(tǒng)由于繩數(shù)量小于自由度數(shù),導致幾何方程與力平衡方程相互耦合,必須聯(lián)合求解才能確定位姿、繩拉力等參數(shù),這屬于運動學范疇,包括正問題和逆問題求解等兩個方面。目前,相關文獻比較有限。其中,Abbasnejad和Carricato針對欠約束繩牽引并聯(lián)機器人的運動學進行了歸納和總結,指出在給定繩長時末端執(zhí)行器仍然保留一些自由度,并提出采用同倫算法求解正幾何靜力耦合方程組[89]。Carricato和Merlet重點分析了欠約束繩牽引并聯(lián)機器人的穩(wěn)定性,通過虛功Hessian矩陣對靜態(tài)平衡穩(wěn)定性進行評估,并進一步研究了3根繩牽引的欠約束并聯(lián)機器人的逆幾何靜力問題[90]。Berti等提出基于區(qū)間分析法,以解決欠約束繩牽引并聯(lián)機器人的正幾何靜力問題[91]。國內(nèi),僅有文獻[92-93]分析了欠約束并聯(lián)機構的工作空間和靜剛度特性。 針對其在風洞試驗中的應用,運動幾何動力耦合問題,即系統(tǒng)的動力學機理仍不夠清楚,缺乏飛行器模型動態(tài)位姿與繩長、繩拉力之間的內(nèi)在關系。尤其,風洞試驗來流會引起支撐系統(tǒng)振動,進而可能導致繩索虛牽,影響模型運動特性。盡管有文獻[94]通過風洞試驗方法,得到了來流作用下單根繩索的動力學響應特性。但針對多繩牽引支撐系統(tǒng),在繩索運動、不同預緊力情況下,流致振動問題仍需深入研究,否則將嚴重影響飛行器模型運動控制的精度和魯棒性。因此,充分研究欠約束繩并聯(lián)支撐系統(tǒng)的動態(tài)特性是應用于風洞試驗的關鍵。 4.2.2 系統(tǒng)控制技術 為了實現(xiàn)飛行器模型的自由運動,或強迫+自由運動,欠約束繩牽引并聯(lián)支撐系統(tǒng)的控制是關鍵。對于自由運動控制,主要指通過外力作用或操縱舵面,考察模型的自由運動特性。對于強迫+自由運動控制,主要指調(diào)整繩長實現(xiàn)約束自由度上的強迫運動,同時保證繩索始終張緊,抑制繩索振動。 關于欠約束繩牽引并聯(lián)支撐機構控制問題,Yamamoto等基于逆動力學和繩拉力約束條件,對三繩牽引的欠約束并聯(lián)機器人進行精確線性化,完成軌跡控制仿真和實驗驗證[95]。Heyden和Woernle針對運動學不確定繩牽引機構,基于微分平滑理論進行系統(tǒng)反饋控制[96]。Hwang等通過系統(tǒng)固有頻率分析,基于前饋的輸入整形方法,對欠約束繩牽引并聯(lián)機構軌跡控制中的振動進行抑制[97]。Barbazza等針對平面欠約束繩牽引宏-微機器人,采用微分平滑方法和多目標優(yōu)化設計控制率,實現(xiàn)了點到點運動控制[98]。國內(nèi),Zhang和Shang提出了一種幾何方法對欠約束三自由度繩牽引并聯(lián)機構進行軌跡規(guī)劃,但未涉及控制[99]。由上述可知,雖然文獻[95-96]研究了軌跡控制問題,但由于其一般用于運輸/裝卸行業(yè),通常只實現(xiàn)簡單軌跡控制,如點到點運動等,而且所受干擾小,控制要求不高。因此,對風洞試驗欠約束繩牽引并聯(lián)支撐系統(tǒng)而言,無論是對自由運動的控制,還是對強迫+自由運動的控制,考慮繩系振動與來流干擾等因素,設計有效的控制器對后續(xù)試驗測量與分析均具有重要意義。 基于繩牽引并聯(lián)機器人技術的冗余(欠)約束系統(tǒng)可為風洞試驗提供一種新的支撐手段。綜合該技術的研究現(xiàn)狀與關鍵問題分析,其發(fā)展趨勢可歸納為兩個方面: 1) 可重構。針對新一代戰(zhàn)斗機、直升機、導彈等飛行器對試驗技術開發(fā)和驗證的迫切需求,開展風洞試驗模型通用支撐技術研究具有重要的工程應用價值。繩牽引并聯(lián)支撐技術應具有可重構性或自適應性,具體包括離線重構和在線重構[100-102],即根據(jù)對系統(tǒng)剛度與有效工作空間等要求,以及繩拉力、幾何干涉等約束,以系統(tǒng)能量消耗或靈敏性為指標,對繩牽引并聯(lián)支撐系統(tǒng)的布局進行優(yōu)化設計,最終滿足不同飛行器模型的試驗要求。其中,在線重構技術的發(fā)展將會進一步提升繩牽引并聯(lián)支撐技術的水平。 2) 智能化。為進一步提高風洞試驗的運行效率和精度,繩牽引并聯(lián)支撐智能化將是發(fā)展的一個重要方向。主要基于系統(tǒng)動力學機理與穩(wěn)定性研究,結合計算機視覺測量技術,如采用三維圖像信息處理與運動估計,提高飛行器模型的位姿測量精度與實時性;采用先進理論算法與智能控制方法,合理規(guī)劃飛行器運動軌跡,實現(xiàn)飛行器模型的自適應魯棒控制。 結合中國風洞試驗的實際需求,該技術有望應用于多種情況,如可自主調(diào)節(jié)支撐系統(tǒng)剛度和頻率,作為軟支撐方式用于氣動彈性試驗;采用欠約束支撐,釋放某自由度,進行氣動/運動耦合分析試驗,特別是在有舵面指令的情況下,可進一步驗證飛行控制率等。總之,繩牽引并聯(lián)支撐技術有望進一步擴展風洞試驗能力,提高風洞試驗的運行效率,提升風洞裝備水平。3 冗余約束繩牽引并聯(lián)支撐技術
3.1 關鍵問題分析

3.2 低速風洞試驗成果


4 欠約束繩牽引并聯(lián)支撐技術
4.1 研究現(xiàn)狀

4.2 關鍵問題分析
5 總結與展望
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19