基于SIFT特征的鐵路扣件狀態檢測算法
2018-10-26 06:11:08趙珊珊
傳感器與微系統 2018年11期
趙珊珊, 何 寧, 曹 珊
(1.北京聯合大學 北京市信息服務工程重點實驗室,北京 100101; 2.北京聯合大學智慧城市學院,北京 100101)
0 引 言
目前我國高鐵發展迅速,車載軌道巡檢系統方面的研究取得了一定的成果,但一直未能很好地解決鐵路軌道及鐵路扣件狀態的檢測問題。鐵路扣件缺失或斷裂,都可能釀成列車脫軌等重大事故。文獻采用小波變換得到扣件區域,并用閾值分割和形態學方法獲得扣件的二值圖像,但受背景環境的影響。文獻采用方向場和模板匹配的方法檢測出扣件狀態,該方法對扣件定位的精確度和圖像質量要求很高,匹配精度受到嚴重制約。文獻采用傳統的梯度方向直方圖(histogram of oriented gradient,HOG)方法提取特征,通過基于核的主成分分析法進行降維,經支持向量機(support vector machine,SVM)中的分類訓練,實現扣件狀態檢測,該方法提取的冗余特征量過多導致計算時間長。文獻融合塔式梯度方向直方圖(pyramid histogram of oriented gradients,PHOG)特征和宏觀局部二值模式(macroscopic local binary pattern,MSLBP)特征提取扣件特征,用SVM分類器進行分類,其難以提取到完整的扣件邊緣。文獻采用局部二值模式(local binary pattern,LBP)和SVM的組合模型,對扣件圖像進行特征提取與類別判定,但其對非明顯紋理扣件圖像處理結果不理想。
為了提高扣件狀態檢測的準確率,本文采用尺度不變特征轉換(scale-invariant feature transform,SIFT)特征、Fisher向量和LIBLINEAR分類器對扣件狀態進行分類檢測。
1 扣件狀態檢測算法
鐵路扣件的常見狀態如圖1所示。
1.1 SIFT特征
SIFT特征對旋轉、尺度縮放、亮度變化等保持不變性,對噪聲也有一定抑制,因此是一種非常穩定的局部特征。SIFT特征生成一般情況下包括:1)極值點檢測; 2)特征點定位;3) 為特征點分配方向;4)生成特征描述子。
使用高斯卷積核構建高斯差分尺度空間,高斯尺度空間由不同高斯核平滑卷積而成
D(x,y,σ)=((G(x,y,kσ)-G(x,y,σ))*I(x,y))
=L(x,y,kσ)-L(x,y,σ)
(1)

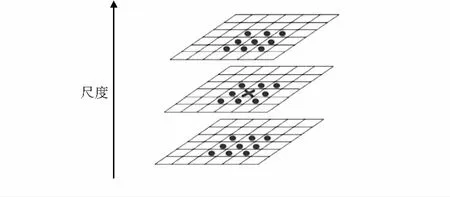
圖2 尺度空間極值點檢測
1.1.2 特征點定位
在得到潛在的特征點后,需要去除一些低對比度的極值點以及邊緣響應點來精確定位特征點,首先對空間尺度函數進行泰勒展開成三維二次函數
4.“問責”強震懾。建立健全監督問責工作機制,對基層黨組織和黨的領導人員違反黨章和其他黨內法規,不履行或者不正確履行職責等失職失責情況進行問責,以“有責必問、問責必嚴”的強烈意識,全面扎緊問責制度的籠子。
(2)

1.1.3 特征點方向分配
找到了特征點需要給特征點的方向進行賦值。利用特征點鄰域像素的梯度分布特性來確定其方向參數,再利用圖像的梯度直方圖求取關鍵點局部結構的穩定方向,特征點(x,y)處的梯度模值和方向分別為
m(x,y)=(L(x+1,y)-L(x-1,y))2+
(L(x,y+1)-L(x,y-1))2
(3)
(4)
根據鄰域點的方向、梯度幅值以及距離特征點的遠近構建梯度方向直方圖,直方圖中峰值所對應的角度即為該特征點的主方向。
1.1.4 特征點描述
將坐標軸旋轉為特征點的主方向,以特征點為中心取 的窗口(特征點所在的行和列不取)。圖3(a)中的加黑點為當前特征點,每個小格代表特征點鄰域所在尺度空間的一個像素,在4×4的圖像塊上計算8個方向的梯度方向直方圖,繪制每個梯度方向的累加值,形成1個種子點,如圖3(b)所示。圖中1個特征點由4×4共16個種子點組成,每個種子點有8個方向向量信息,可產生4×4×8共128個數據。圖4為提取SIFT特征的結果。

圖3 生成關鍵點描述子

圖4 提取的SIFT特征點
1.2 Fisher向量
(5)

用EM算法估計高斯混合模型的參數λ,得到高斯混合模型參數的先驗值,wi是隨機選中第i個高斯分布的概率,另外2個參數為高斯分布的均值和方差。
特征xt由第i個高斯分布生成的概率為
(6)

1.3 LIBLINEAR訓練
LIBLINEAR同時支持線性SVM和邏輯回歸分類,本文使用LIBLINEAR支持的L2損失函數的線性SVM將扣件狀態劃分為正常與異常2類。使用訓練集中扣件圖像歸一化后的Fisher向量訓練LIBLINEAR分類器。數據集采用集通線鐵軌扣件數據,其訓練集中正樣本10 000張,負樣本10 000張。將訓練集劃分為5個子訓練集,5個子訓練集分別是2 000張正樣本和2 000張負樣本,采用5折交叉驗證的方法,最終通過實驗確定代價參數C=4,迭代停止條件的容忍度。eps=0.01。
2 實驗與結果分析
實驗運行環境是Intel(R)I5-6300HQ CPU,2.20 GHz,8 GB內存,開發環境為Visual Studio 2012和OpenCV。本文使用的扣件數據集是通過高速掃描相機采集的集通線鐵軌扣件數據。集通線共34 000張扣件圖像。訓練庫圖像20 000張,其中,正、負樣本各10 000張;測試樣本14 000張,其中正、負樣本各7 000張。
2.1 準確率測試
本文使用的扣件數據集通過高速掃描相機采集的集通線鐵軌扣件數據。本文算法在不同數量訓練集和測試集情況下的準確率如表1 所示,本文算法的扣件狀態檢測平均準確率達到98.97 %。
2.2 算法效率
2.2.1 不同方法對比
為了驗證實驗結果,將本文方法與方向場匹配方法,小波分離+神經網絡法處理得到的結果進行比較。實驗對比結果如表2所示,可以看出本文的誤報率和漏報率均低于其他2種方法。相對于方向場,本文方法法時間稍長,但誤報率和漏報率遠低于方向場法。相比于小波+神經網絡方法,本文方法不僅耗時短,而且誤報率與漏報率均低于該方法。本文提出方法的效果最好。

表2 實驗結果對比
2.2.2 分類器效率對比
LIBLINEAR支持線性分類,LIBSVM支持線性分類和非線性分類,在線性分類條件下,LIBLINEAR無論是在訓練上還是在預測上,均比LIBSVM高效得多。本文通過選用不同樣本數進行5組實驗,分別采用2 422,4 524,6 978,15 324,20 234張樣本數進行測試。實驗表明,分類時間上LIBLINEAR速度明顯優于SVM和LIBSVM,結果如圖5。

圖5 不同分類器時間效率
3 結 論
對于扣件狀態分類識別問題,利用SIFT特征提取算法提取扣件圖像的局部特征,將每幅扣件圖像的SIFT特征聚合成Fisher向量,再對Fisher向量進行歸一化,最后通過訓練的LIBLINEAR分類器對扣件圖像做出狀態分類,該方法扣件狀態識別平均準確率為98.97 %,有較高的識別率及魯棒性。在后續的研究工作中,為了進一步提高扣件狀態識別準確率并充分利用數據集,將考慮將卷積神經網絡應用到扣件狀態分類識別研究中。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54