汽車自動駕駛的關鍵技術研究
2018-10-24 02:58:10王羽張美芳張凱帆
世界汽車 2018年10期
王羽 張美芳 張凱帆
隨著新一代科技革命的推進,全球各大整車制造企業、互聯網企業、汽車零部件企業、傳感器企業以及研究高校和企業都正在全力研發汽車自動駕駛技術及相關產品、測試技術和測試裝備,各國政府也在加快汽車自動駕駛產業布局,推進測試場地建設、標準測試體系建設、道路測試規范建設等。其中最根本的是汽車自動駕駛技術,技術的智能性、穩定性、安全性及可靠性是所有相關產業蓬勃應聲發展的根基。本文主要介紹汽車自動駕駛前沿技術發展現狀,主要分3個部分進行闡述,分別是汽車自動駕駛技術概述、汽車自動駕駛關鍵技術現狀、人工智能技術在汽車自動駕駛上的應用。
一、汽車自動駕駛技術概述
汽車自動駕駛技術是提高車輛自主識別規劃控制能力,使車輛具備駕駛人的眼腦手腳功能,可實現更安全高效駕駛的單車基礎技術。因此,汽車自動駕駛技術是逐步從傳統交通系統中解放駕駛人并以智能化汽車為主體構建新型智能交通系統的核心技術。目前行業內汽車自動駕駛的智能化技術路徑主要有兩種,其主要區別在感知技術路線。一類是以傳統較為廉價的攝像機為主導,輔以毫米波雷達等的多傳感器融合方案,以特斯拉、福特、沃爾沃等傳統整車企業為代表;另一類是以性優價高的32線或64線激光雷達為主導,依賴于高精度地圖并輔以攝像機、毫米波雷達、超聲波傳感器等的技術方案,主要以谷歌、百度等IT企業為代表。現有的智能駕駛系統大都以激光雷達作為主傳感器,但其成本居高不下,因此得益于人工智能技術發展的成本較低的以攝像機為主傳感器的技術方案成為新的研究熱點。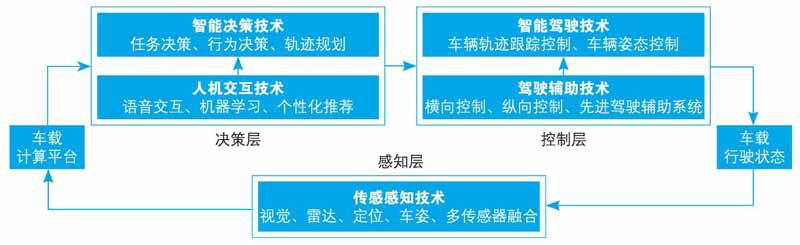
汽車自動駕駛技術架構從自動駕駛汽車的功能層角度分為感知層、決策層、控制層,其中的感知融合技術、智能輔助技術、智能駕駛技術、智能決策技術和人機交互技術等都需要車載計算平臺來完成數據融合、高速計算、智能決策、協同控制,從而完成汽車行駛和信息交互過程中多源海量異構數據的高速計算處理,為決策和控制提供實時響應,實現汽車的自動駕駛。
二、汽車自動駕駛關鍵技術
智能化關鍵技術是汽車自動駕駛的最核心技術,主要包括多傳感器融合技術、規劃決策技術、控制執行技術、高精度地圖構建和高精度定位技術。其中,感知、決策和控制技術是核心功能技術,高精度地圖和高精度定位技術是行駛過程的基礎性關鍵支撐技術,無論是感知決策規劃還是控制執行都需要車輛自身和周邊其他動靜態物體的位置速度等信息。
1.感知數據融合技術
環境感知主要包括路面、靜態物體和動態物體3個方面,感知數據的融合包括對多個傳感器獲取的動靜態物體的檢測識別定位信息、跟蹤預測信息等的融合處理與反饋。其中對行人、非機動車輛和其他機動車等動態物體的運動行為做出預測,并能夠根據當前運動速度計算出安全空間對智能汽車的自主決策是極其重要的。
多傳感器信息融合技術主要有貝葉斯信息融合方法、卡爾曼濾波融合方法和神經網絡融合法。貝葉斯信息融合方法是基于概率統計的推理方法,卡爾曼濾波方法可以從有限的、有噪聲的觀察序列中預測糾正進而推算出物體的位置等信息,神經網絡方法通過大量的學習訓練消除多傳感器協同工作中產生的交叉影響效果。
2.規劃決策技術
規劃決策技術主要包括全局路徑規劃、局部行為決策和駕駛動作決策。其中全局路徑規劃是依賴于高精度地圖的目的地間可選路徑的規劃過程;局部行為決策主要是依據當前行車環境下的感知信息和定位信息等作出巡航、換道、轉彎、掉頭等決策;駕駛動作決策主要根據局部行為決策信息將當前規劃路徑分為多個小范圍路徑,生成多個短距離路徑的中間路徑點,主要包含到達這些路徑點時汽車自動駕駛應當具備的速度、加速度、車輪轉向等具體指標信息。
感知融合技術與規劃決策技術的核心是人工智能算法與計算平臺,數據導入計算平臺后由不同的芯片進行計算。現有的計算方案有基于GPU、DSP、FPGA、ASIC的解決方案,還有其他芯片方案。芯片方案主要有谷歌的TPU芯片、Mobileye? Eye QX?、NVIDIA Drive PX芯片、奧迪的Zfas等。同時,多家研發機構也在設計探索能夠使用移動處理器完成計算任務的高效計算平臺。
3.控制執行技術
控制執行技術主要借助于車載控制平臺實現汽車自動駕駛的橫縱向控制。核心任務是通過CAN總線獲取規劃決策層輸出的多個中間路徑點軌跡信息后,經過一系列結合車身屬性和外界物理因素的動力學計算,轉換成對車輛線控的油門、剎車的縱向控制命令和轉向的橫向控制命令來完成軌跡信息的執行。
車載控制平臺是車輛的核心控制部件,主要包括電子控制單元ECU和通信總線兩大部分。ECU主要實現算法控制,通信總線完成ECU和機械部件間的通信功能。汽車自動駕駛的車載控制平臺與傳統汽車的不同在于可根據需要改寫ECU,主要有直接改變ECU運算器硬件的改裝和改變內部程序的改裝。后者主要是通過原ECU程序即改變處理問題的算法和運行法則來改變發動機的運行。
4.高精度地圖構建與高精度定位技術
高精度地圖是區別于傳統電子地圖的包含大量三維表征行車輔助信息的汽車自動駕駛專用地圖。行車輔助信息主要包括路面的幾何結構,周邊道路環境的點云模型,車道的幾何結構及坡度、曲率、限速等屬性信息。機器不具備人類與生俱來的視覺識別和邏輯分析能力,必須借助高精度地圖擴展車輛的靜態環境感知能力,為汽車自動駕駛提供全局視野。
高精度地圖的構建是一個多傳感器融合的過程,主要包含光學雷達LiDAR、全球衛星導航系統GPS、陀螺儀IMU和輪距傳感器。陀螺儀和輪距傳感器可以高頻率稍有偏差地給出自動駕駛汽車的位置預測,再融合GPS和LiDAR的數據算出當前車的準確位置,最后根據當前的準確位置與激光雷達的掃描數據,把新的數據加入地圖中以此來逐步構建高精度地圖。
高精度定位技術依賴于高精度地圖信息,自動駕駛系統可以通過對比當前位置的傳感器獲取行車環境信息和高精度地圖,精確地確認位置,并能夠確認當前位置一段距離內的行車環境,可進行下一步軌跡規劃和決策。
三、人工智能技術
人工智能技術在汽車自動駕駛上的應用主要在環境感知、規劃決策與控制這三大功能的算法程序上,即運用深度學習、模糊邏輯、專家系統、遺傳算法等方法,通過大數據的自主學習和訓練,使汽車自動駕駛具備一定程度的智能水平。
1.人工智能在環境感知中的應用
計算機視覺在汽車自動駕駛上的應用有靜態物體分類與交通信息識別、動態物體軌跡跟蹤與行為預測,以及基于不同算法的車輛自身定位等方面。模式識別、卷積神經網絡等方法可以用于計算機獲取的大量圖像視頻信息處理,融合運動預測算法來實現運動物體的識別跟蹤。
運動預測算法:主要有底層的Optical Flow與立體視覺技術,和基于馬爾科夫決策過程的多個運動目標識別追蹤算法等。Optical Flow是基于單個攝像頭的連續時刻圖像或視頻序列中的像素級密集對應關系,立體視覺是基于多個攝像頭的同一時刻圖片,基于神經網絡的監督學習可以通過對獲取圖像的訓練得到場景的三維深度或距離估計,從而預測目標的運動軌跡。基于馬爾刻度決策過程的多個運動目標識別追蹤算法首先對運動目標進行馬爾科夫建模,主要通過對馬爾科夫狀態空間的目標狀態轉換分析來完成對物體的追蹤。
基于視覺的定位算法:主要有基于拓撲與地標的算法和基于幾何的視覺里程計算法兩種。基于拓撲與地標的算法把所有的地標組成一個拓撲圖,自動駕駛汽車檢測到某個地標時就可以大致推斷出自身所在的位置,但該方法需要預先建立精準的拓撲圖。基于幾何的視覺里程計算法分單目和雙目兩種。單目視覺里程計算法的主要問題是無法推算出觀測到的物體大小,需要與其他傳感器的結合才能進行準確定位;雙目視覺里程計算法通過左右兩幅圖的視差圖和攝像機的幾何特性計算出特征點的深度,找出幀與幀之間的特征點對應關系,推算出兩幀之間車輛的運動,再依據之前車輛的位置計算得到最新的車輛位置。
2.人工智能在規劃決策中的應用
行為決策與路徑規劃是人工智能在自動駕駛汽車領域中的另一個重要應用。增強學習可以有效地解決環境中存在的特殊情況,是通過和環境的交互來學習在對應的場景下進行規劃和決策以達到最優駕駛行為的方法。其目的是在給定的任意環境下,通過對環境的探索學習到最佳的策略,采取最優化行為。常用的增強學習算法有REINFORCE算法和Deep Q-Learning算法。
現有的深度增強學習解決的問題中一般針對于短程路徑,其執行行為也只對環境有短期影響。對于復雜決策的場景無法通過短期的效果得到最優決策策略,此時必須結合基于搜索的算法來解決問題。基于搜索的算法一般通過搜索樹來實現,通過窮舉搜索數的每個節點,用遞歸的方式計算出最值函數和最優策略。基于搜索的算法和基于增強學習算法的結合一方面能夠通過搜索獲取復雜決策場景的最優策略,一方面又能通過增強學習加速搜索過程,該方法在解決涉及長期規劃問題方面具有巨大潛力。
3.人工智能在車輛控制中的應用
汽車自動駕駛的控制是指當收到控制指令后,控制系統調整車輛的機械參數使其達到控制目標的過程。人工智能在車輛控制中的應用主要在自動控制技術方面,主要集中在模糊控制和專家系統控制,主要通過控制器中的程序實現對電氣系統的控制。模糊控制在車輛控制中的應用主要體現對行為與動作的智能處理,如對障礙物體的躲避、行進速度的調整以及對移動目標追蹤等方面。車載傳感器在完成信息采集后,會對信息進行融合處理作出判斷,在模糊推理算法下,對優先級行為進行確定,通過汽車平臺實現各項操作。專家系統控制主要是應用某一特定領域內大量的專家知識和推理方法解決問題的過程,其研究目標是學習模擬人類專家的推理處理過程,實現對車輛的控制。
四、結語
汽車自動駕駛是未來汽車發展的方向,是將探測、識別、判斷、決策、優化、優選、執行、反饋、糾控功能融為一體,集微電腦、微電機、綠色環保動力系統、新型結構材料等頂尖科技成果為一體的智慧型汽車。總體來看,我國汽車自動駕駛的發展還需要多方面共同努力。汽車供應商對于各種車輛駕駛輔助功能的研究是無人駕駛汽車技術不斷向前發展的源動力;政策與法律的制定與實施,又是無人駕駛汽車真正上路的前提。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國工程咨詢(2016年4期)2016-02-14 07:28:28
