裝載機械臂的智能輪式環衛機器人
2023-02-08 06:36:26秦耀澤郭迎九
物聯網技術 2023年1期
黃 磊,秦耀澤,郭迎九
(北京城市學院 信息學部,北京 101300)
0 引 言
近年來,我國非常重視生活垃圾的分類回收,有數據顯示我國年產垃圾約占全球的30%,且城市固體廢棄物的積累量約為70億噸[1-2]。上海自1995年起陸續發布了八部針對生活垃圾處理的政策文件,而到2019年落實完全分類的居民僅有11%[3]。另一方面,目前城市環衛主要依靠人力勞動,而2020年咸陽市環衛工人的健康檢查報告顯示:受檢的1 066名從業者平均年齡為56歲,健康方面的異常率高達92.1%[4]。傳統環衛行業同時面臨招工難、留工難、用工難等問題[5],城市環衛工作高強度低收入的性質與高齡從業者長期亞健康狀態之間的矛盾日益激烈。
隨著人工智能與傳感識別技術的飛速發展,利用相關技術設計開發一款輔助完成城市環衛工作的智能機器人,能夠有效緩解矛盾。早在20世紀40年代,西方國家已經開始研發液壓型車載機械臂以減少高昂的人力成本,如德國Ducker公司研發了基于同套臂架系統的智能公路清潔養護工程車,通過更換末端機構實現不同應用。但此類產品體積較大,并沒有很好地減少人力成本。
跨入信息時代后,為給全面推進城市數字化轉型賦能,實現無人環衛器械的商用落地,百度、宇通重工、龍馬環衛等大型企業相繼推出智能環衛車輛產品,滿足園區環境的地面清掃需求[6-7]。而就現階段的無人駕駛環衛車來說,由于自動駕駛技術的局限性導致產品對環境依賴較高,也弱化了垃圾處理的針對性,因而目前并沒有得到廣泛應用。
1 環衛機器人設計
1.1 結構設計
基于上述背景,本文開發了一款裝載機械臂的智能輪式環衛機器人。機器人的底盤結構采用由一組萬向輪和兩組伺服電機驅動的輪式結構。萬向輪支撐整體結構及輔助運動,驅動輪通過伺服電機與減速器的同步帶傳動方式進行驅動,調整伺服電機輸入,配合可控制電機轉向的H橋電路,即可實現機器人的行駛功能。機械臂結構如圖1所示,各關節都由獨立伺服機構控制,最終所有伺服器由控制器統一控制并協調工作[8-12]。

圖1 四自由度機械臂示意圖
使用D-H法,根據關節結構為每處連桿建立坐標系Ai(i-1),通過坐標系的變換完成機械臂末端位姿的描述,其比例模型的參數見表1所列。以此進行機械臂模型仿真及關節運動解算[13]:

表1 四自由度機械臂D-H參數表
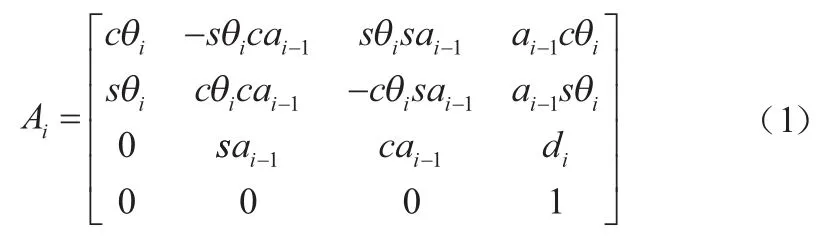
其中,Ai表示第一個連桿坐標系相對于基坐標系的位置和姿態,以此類推。該機械臂的正運動學變換矩陣為:

在此基礎上可求解各個關節的轉角θi,即式(3)~(5)。通過輸入PWM控制每個關節的轉角,即可實現對該機械臂整體的控制。

1.2 傳感網絡部署
(1)激光雷達與SLAM


由貝葉斯公式計算得:

兩邊取對數:


圖2 激光SLAM建圖
(2)攝像頭與目標識別
在目標識別方面,經歷了OpenCV和Tensorflow路線帶來的高成本、高難度和低收益后,最終選擇了相對簡潔的華為多主體和百度垃圾識別雙API調用方案,以多主體識別API為例,將攝像頭畫面周期上傳至OSS生成URL,調用API接口即可返回主體信息。
(3)超聲波測距模塊及垃圾位置判定
HC-SR04采用IO口TRIG觸發測距,發送信號后,若接收到返回信號,則通過IO口ECHO輸出時差高電平。常溫下聲波傳輸速度約為344 m/s,通過式(9)即可計算距離d,其中t為高電平時間。

攝像頭反饋的方位信息結合超聲反饋的距離信息構成物體極坐標,由控制器樹莓派在控制中不斷校正實現閉環,最終驅動機械臂實現抓取。
(4)其他參照信息傳感模塊
為促成機器人的數據可視化工作,實現對其全方位的控制,為其裝載了GPS模塊S1216和加速度模塊MPU6050,遠程獲取經緯度信息和六軸速度信息。
1.3 控制核心
控制核心是機器人數據計算、輸出命令的重要模塊,本文的設計中選擇了較高算力的樹莓派4B作為上位機,與32單片機構成機器人的雙控制核心。樹莓派擁有網卡、USB等模塊,同時具備音視頻模擬輸出能力,還具備GPIO、SPI、UART等硬件設備,為機器人提供硬件條件和計算環境,具有計算能力強、體型小等優點。為了充分應用樹莓派資源,引用了一款擴展板Nano_Controlle,為傳感器提供更多擴展接口,同時輸出PWM信號控制底盤。
2 整體框架
本文提出如圖3所示的硬件架構,模塊部署及程序燒錄實物如圖4所示,測試結果見表2所列。
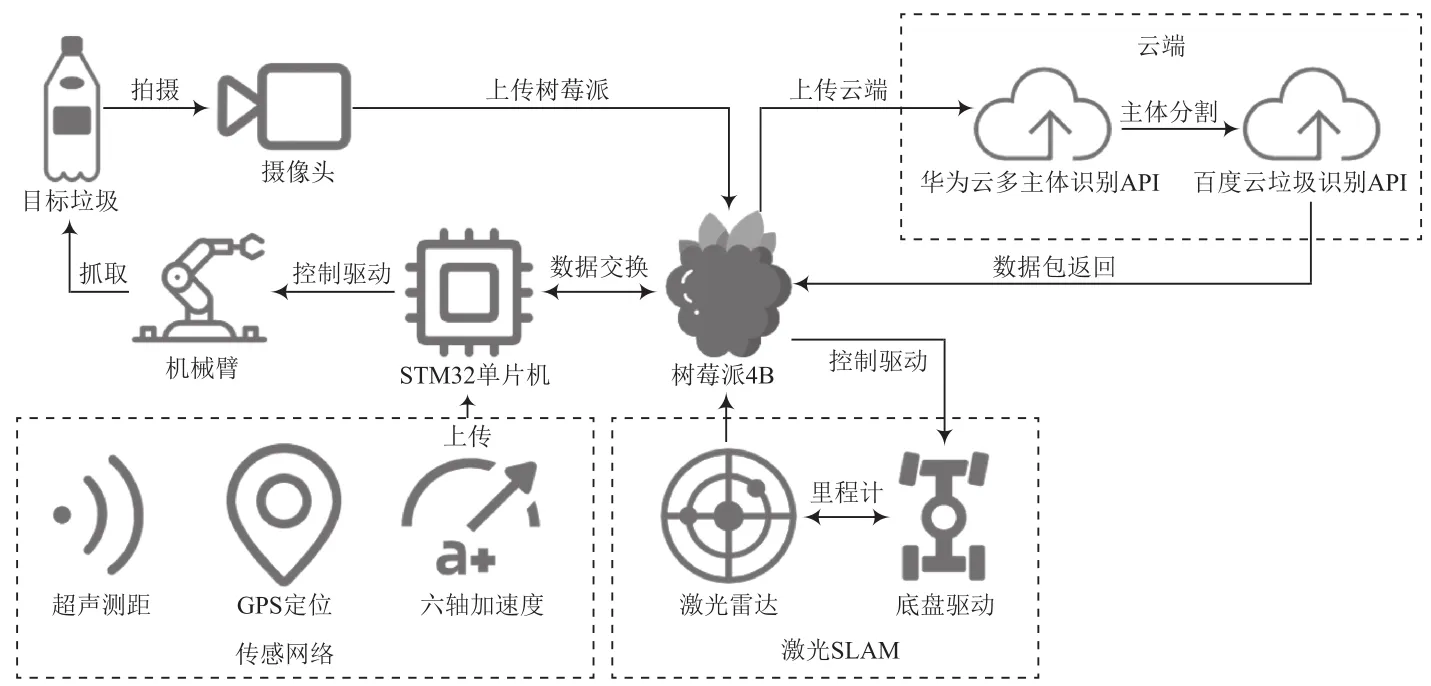
圖3 裝載機械臂的智能輪式環衛機器人硬件系統模型

圖4 裝載機械臂的智能輪式環衛機器人實物

表2 實驗室測試結果
3 結 語
本文設計了一款輔助城市環衛的智能機器人,具備避障導航、路徑規劃、對象識別、控制抓取四大核心功能。盡管各項基本功能已順利實現,但是仍有空間亟待優化。第一是目標識別方面,現有方案由于需要嵌套調用API,網絡依賴性強、延遲性較高。后期團隊提出基于Paddlelite的本地化模型部署方案,但數據集局限導致識別精度欠缺,想要實裝仍需優化。第二是在目標物品定位上,可以改用深度攝像頭等高精設備。另外,未來還可以考慮通過搭載不同的末端執行機構完成更多類型的工作,乃至于在軍事、消防、物流等領域開拓新的應用,為提高人們生活水平、推動科學技術發展發揮更大的作用。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29