基于Lab顏色空間的棉花覆蓋度提取方法研究
2018-10-20 06:43:42牛亞曉張立元韓文霆
農業機械學報 2018年10期
關鍵詞:分類
牛亞曉 張立元 韓文霆
(1.西北農林科技大學機械與電子工程學院, 陜西楊凌 712100; 2.農業部農業物聯網重點實驗室, 陜西楊凌 712100; 3.西北農林科技大學水土保持研究所, 陜西楊凌 712100)
0 引言
植被覆蓋度(Fractional vegetation cover,FVC)是描述地表植被分布的重要參數,通常定義為統計范圍內植被(包括葉莖)垂直投影面積所占的百分比[1-2],是區域生態系統研究的重要指標,在分析植被分布影響因素、評價區域生態環境等方面具有重要意義[3-11]。隨著遙感技術應用越來越廣泛[12-14],植被覆蓋度的遙感監測已經成為精準農業的重要內容和研究熱點。根據ZHOU等[15]的建議,理想的植被覆蓋度獲取方法應具備以下幾個特征:采用低成本、易于操作的設備,提取結果準確、客觀,對采集時間要求較低,以及需要較少的人機交互。
目前,植被覆蓋度的獲取方法主要分為目估法、采樣法、儀器法以及照相法[16-17]。目估法是指通過專業人員目視估計植被覆蓋度,具有容易操作的優點,但是其測量結果較為主觀。采樣法通過統計樣地內植被出現的頻率進行植被覆蓋度估計,該方法只能針對固定的植被類型或在固定的時間內進行測量,具有操作復雜、測量時間長等缺陷。儀器法則是利用專門的空間定量計等進行植被覆蓋度估計,由于需要專業儀器,增加了推廣難度。顯然,上述3種方法并不具備理想植被覆蓋度獲取方法的特征。而照相法則是利用低成本、易于操作的數碼相機,在作物上方采集數字圖像,進而通過在圖像中區分植被與非植被提取植被覆蓋度。與上述其他方法相比,照相法具有操作簡便、效率高等優點,是較為理想的植被覆蓋度提取方法,目前得到廣泛應用。
基于照相法獲取植被覆蓋度的關鍵是區分數字圖像中的植被像元與非植被像元。目前,常見的區分方法主要有目視解譯、監督分類和利用專業遙感軟件等,分類過程需要人機交互,效率較低。如汪小欽等[18]采用目視解譯的方式將數字圖像中的像元逐個區分為植被與非植被,并以此作為植被覆蓋度的地面參考值,用于評價各個植被指數對植被像元的提取效果。任世龍等[19]以商業軟件WinCAM獲取的植被覆蓋度為地面測量值,對比分析了其開發的DPPS系統與基于Lab顏色空間方法的估算結果精確度,認為高寒草地生態系統DPPS比Lab顏色空間方法更適于提取植被覆蓋度。常慧[17]以通過CAN_EYE軟件獲取的草地植被覆蓋度作為地面測量值,選取了青海湖流域植被覆蓋度反演的最佳遙感模型。VALéRIE等[20]使用專業遙感軟件CAN_EYE處理多種作物的數字圖像,從土壤背景中正確識別植被像元。
隨著圖像處理技術的發展,越來越多的研究人員開始利用不同顏色空間中植被像元與非植被像元特異性進行植被覆蓋度提取[16,21-25]。上述研究雖然在基于不同顏色空間提取植被覆蓋度方面取得了一定的成果,但是大多沒有分析所提出的提取方法對不同光照條件的適用性,或分類閾值在不同的光照條件下具有波動性,限制了上述方法在田間的進一步應用[26]。
隨著傳感器等相關技術的發展,無人機遙感系統憑借其運載便利、靈活性高、作業周期短、影像數據分辨率高等優勢得到迅猛發展,越來越多地應用到各領域遙感監測中[18,27-31]。無人機可見光遙感技術與照相法的結合使得大范圍田間植被覆蓋度的高效、快速提取成為可能。本文以苗期和蕾期的棉花為研究對象,對不同光照條件下手持高清數碼相機獲取的可見光圖像進行處理和分析,尋求一種受光照條件影響小且分類閾值相對穩定的田間條件下快速提取棉花覆蓋度的方法,并通過與無人機可見光遙感技術的結合,提高該方法的效率和適用性,降低數據采集成本和勞動強度。
1 材料與方法
1.1 試驗地概況及數據采集
研究區域位于陜西省楊凌示范區西北農林科技大學中國旱區節水農業研究院(34°17′50.94″N,108° 4′4.17″E)。楊凌位于關中平原中部,屬于暖溫帶半干旱或半濕潤氣候,年平均氣溫11~13℃,年降水量500~700 mm。分別于2017年6月18日15:00(苗期,多云)、2017年6月30日10:00(蕾期,多云)以及2017年7月2日12:00(蕾期,晴天),在棉花試驗田采集了不同天氣狀況及不同時間段的29幅具有不同覆蓋度的數字圖像,圖像按照采集時間進行依次編號。圖像采集設備為數碼相機SONY ILCE-QX1,采集高度2 m,鏡頭垂直向下,圖像分辨率5 456像素×3 632像素,地面分辨率0.4 mm,視場2 m×1.3 m。由于采集高度較低、相機視場角較小(鏡頭焦距為16 mm),因此在本研究中忽略了地面遙感圖像邊緣畸變。根據圖像捕獲時不同的天氣狀況可將29幅數字圖像分為兩類:16幅由棉花、土壤2部分構成的圖像;13幅由棉花、陰影、土壤3部分組成的圖像。
在2017年7月2日(蕾期、晴天)和2017年7月6日(蕾期、多云)的14:30分別利用DJI精靈3標準版進行了無人機可見光遙感數據采集,數據采集高度10 m,圖像分辨率4 000像素×3 000像素,地面分辨率4 mm,視場21.4 m×12.9 m,快門時間設置為1/1 600 s,ISO分別設置為200和400,白平衡分別設置為晴天和陰天,共采集280幅圖像。無人機可見光遙感圖像采集完成后,對2017年7月6日采集的數據利用Pix4DMapper軟件進行圖像拼接處理,獲取棉花試驗田全景圖。基于無人機可見光遙感技術獲取試驗地全景圖(圖1a)和地面可見光圖像采集示意圖(圖1b)。對單幅無人機可見光遙感圖像進行處理時,為了避免圖像邊緣畸變的影響,對圖像進行了修剪,僅保留圖像中心部分的2 000×2 000個像元。
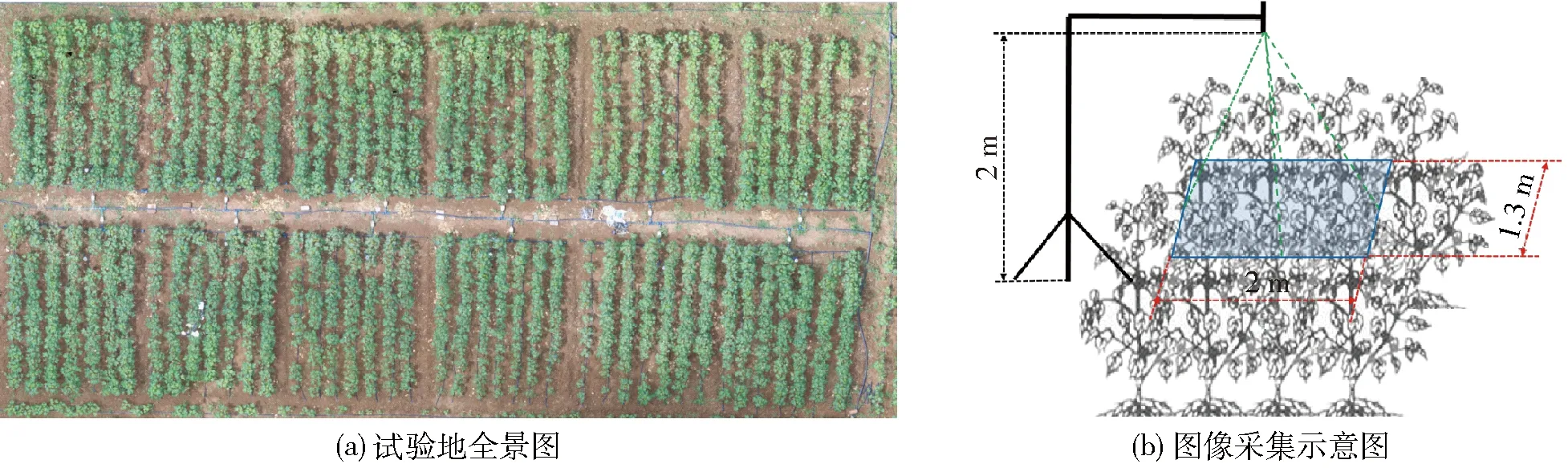
圖1 試驗地概況Fig.1 Experimental site overviews
1.2 基于顏色空間的棉花植被覆蓋度提取方法

圖2 植被覆蓋度提取流程圖Fig.2 Flow chart of FVC extraction
彩色數字圖像具有適應豐富場景的優勢,尤其是戶外場景[27]。對于植被覆蓋度提取來說,彩色圖像可以滿足多種維度的圖像分割要求。在實際應用中,可以通過在某種顏色空間下的某個維度中選取閾值的方式,進行植被覆蓋度提取[22]。本文將基于Lab(a)顏色空間、RGB(2G-R-B)顏色空間和HIS(H)顏色空間分別采用高斯分布擬合求解動態閾值和固定閾值兩種方式進行棉花覆蓋度提取。以Lab顏色空間為例,本文植被覆蓋度提取流程(利用Matlab軟件實現)如圖2所示。
1.2.1顏色空間選取
基于HIS、Lab以及RGB等顏色空間的特定通道或指數都可以提取綠色植被覆蓋度。具體來說,在HIS顏色空間中色調H用于描述純色的屬性(如綠色、黃色);在Lab顏色空間中a用于描述從紅色到綠色的范圍;RGB顏色空間的2G-R-B為過綠指數,常用于提取綠色植被。因此,可以分別利用數字圖像中植被與非植被像元在H、a、2G-R-B指數上分布的差異性進行棉花覆蓋度提取。
精確提取植被覆蓋度的關鍵在于精確區分數字圖像中的植被與非植被像元,因此在進行顏色空間選取時需要盡可能擴大植被像元與非植被像元的分布差異性。為了對植被像元與非植被像元在上述顏色空間特定通道上的分布(高斯分布)差異性進行量化,將其定義為
(1)
式中S——兩類高斯分布的可分離性
μ1——第1類高斯分布均值
μ2——第2類高斯分布均值
σ1——第1類高斯分布標準差
σ2——第2類高斯分布標準差
由圖3可知,S值越大則表示兩類高斯分布重疊部分越小,即兩類像元分布相距越遠。
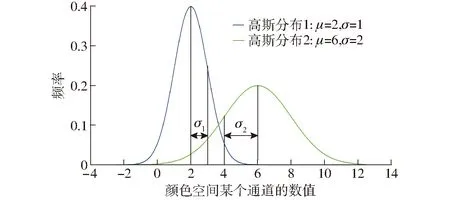
圖3 兩類高斯分布交點示意圖Fig.3 Diagrams of two Gaussian distribution
1.2.2高斯分布擬合
為了研究棉花與土壤像元在上述顏色空間某個通道上的分布情況,分別截取了僅包含棉花和僅包含土壤的圖像,如圖4a和圖4b所示。以其在Lab顏色空間a通道上的分布為例進行分析,直方圖繪制間距為0.2。如圖4所示,棉花像元、土壤背景在a通道上近似服從高斯分布,且均值具有一定的差異。圖4a中的分布可以通過非線性最小二乘算法擬合成(通過軟件編程實現)均值為-27.31、標準差為4.46的高斯分布(R2=0.99)。可以認為在既包含棉花又包含背景像元的數字圖像中,像元在a通道上的分布為兩個或多個高斯分布的綜合(圖4c、圖4d),同樣可以通過非線性最小二乘算法擬合成多個高斯分布,如圖4c和圖4d所示。在過綠指數2G-R-B以及H通道中具有相同的現象。綜上所述,可以利用軟件通過非線性最小二乘算法將數字圖像中的植被像元和非植被像元在a通道、2G-R-B指數以及H通道分布自動擬合成分別對應于植被和背景的多個高斯分布曲線。
1.3 精度評價
目前,植被覆蓋度的真實值難以獲取,在評價植被覆蓋度提取方法的有效性時,一般將目視解譯結果[18]或監督分類結果[16]作為真實值。其中監督分類方法需要在待處理圖像中人工選取N類典型訓練樣本,訓練樣本的選取在很大程度上影響該方法對圖像的分類結果。由于訓練樣本的精確度與圖像分辨率呈正相關,且可以通過對訓練樣本的評價與檢驗避免出現嚴重錯誤,因此圖像分辨率越高,分類誤差越小。文中所用遙感圖像分辨率分別為0.4 mm和4 mm,可以精確地選取土壤和植被兩種訓練樣本,進而保證分類結果的準確性。因此,本文將通過監督分類提取的植被覆蓋度作為真實值,對基于顏色空間與高斯分布擬合方法的提取效果進行評價,并將植被覆蓋度提取誤差定義為
EF=|Fsup-Fcolor|
(2)
式中EF——植被覆蓋度提取誤差
Fsup——通過監督分類方法獲取的植被覆蓋度
Fcolor——基于顏色空間獲取的植被覆蓋度
2 結果與分析
2.1 植被與非植被在不同顏色空間的可分離性
以16幅僅包含棉花、土壤的數字圖像為例,根據式(1)計算了兩類高斯分布的可分離性S,如表1所示。數字圖像在a通道、2G-R-B指數以及H通道的分布直方圖中采樣數量一致,均為80。由表1可知,在上述3種通道上棉花像元與土壤像元分布的可分離性S都大于3,意味著兩類高斯分布的重疊部分都小于0.1%。因此,基于a通道、2G-R-B指數和H通道3種灰度值的高斯分布特性對棉花覆蓋度進行提取均是可行的,而影響植被覆蓋度提取精度的主要因素則為各個顏色空間對綠色植被的識別能力。

表1 植被像元與非植被像元分布的可分離性STab.1 Separability of vegetation pixel and non-vegetation pixel distribution
2.2 植被與非植被動態分類閾值的分布
表2為通過高斯分布擬合得到植被像元與非植被像元在29幅圖像中的動態分類閾值。
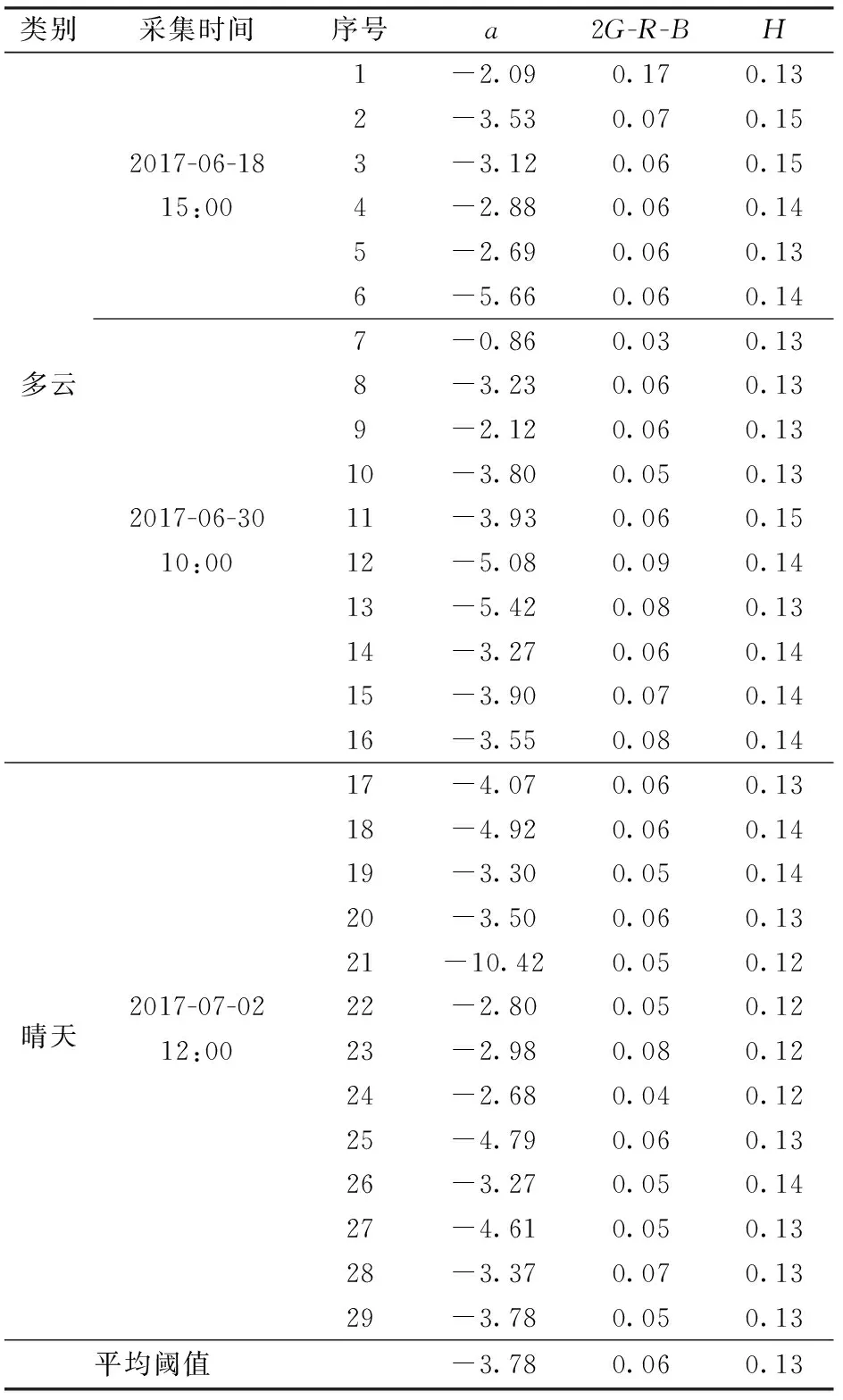
表2 植被像元與非植被像元的分類閾值Tab.2 Classification threshold of vegetation and non-vegetation pixels
對具有不同量綱或特性的數據進行統計分析時,為了使不同的數據具有可比性,一般需要進行標準化處理[32]。為了對比分析棉花圖像在a通道、2G-R-B指數以及H通道中動態分類閾值的離散程度,消除動態閾值在3種通道上數據量級的差異性,對動態閾值進行了標準化處理,即得到均值為0、標準差為1的服從標準正態分布的動態閾值數據。上述3種通道動態閾值經過標準化處理之后的分布情況如圖5所示,其中黑線為分類閾值單位標準差的中分位數,綠色矩形表示上、下四分位數之間的數據分布。由圖5可知,標準化后的動態閾值集中分布在(-0.58,0.72)之間,分布較為集中,即上述3種顏色空間相應通道上的動態分類閾值離散性較小。
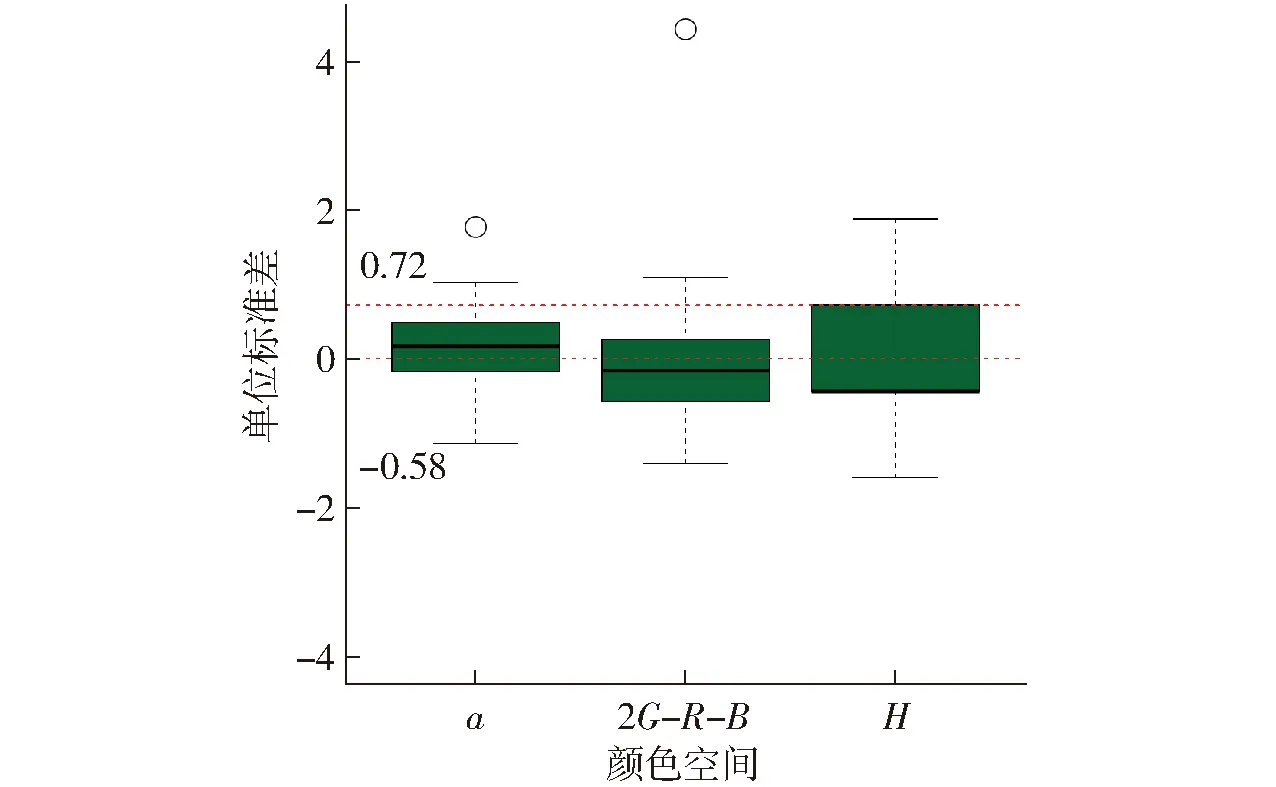
圖5 閾值分布Fig.5 Distribution of threshold
以a通道為例,標準化之后的動態閾值分布范圍(-0.58,0.72)對應的動態閾值范圍為(-4.74,-2.59)。由表1可知,在上述3種通道中植被像元與非植被像元分布的可分離性S都大于3,即意味著兩類高斯分布的重疊部分小于0.1%。由圖4可知,a通道上植被像元與非植被像元高斯分布的重疊范圍約在(-10,-2)之間,由于重疊部分小于0.1%,分類閾值在上述范圍波動并不會對提取結果造成較大影響。為了驗證固定分類閾值在a通道、2G-R-B指數和H通道中進行植被覆蓋度提取的可行性,本文以反映動態閾值分布情況的平均值-3.78、0.06、0.13作為固定分類閾值進行棉花植被覆蓋度提取。
2.3 基于地面遙感的棉花植被覆蓋度提取
圖6為基于顏色空間的植被覆蓋度提取方法得到的3種不同覆蓋度梯度棉花植被覆蓋的提取效果。
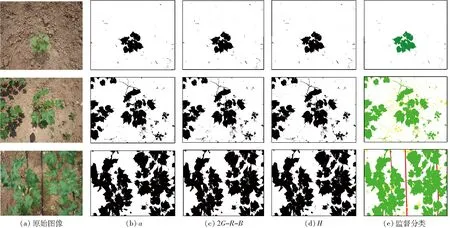
圖6 3種不同梯度的棉花植被覆蓋度提取效果圖Fig.6 Cotton FVC extraction results of three different gradients

圖7 植被覆蓋度提取誤差分布Fig.7 Distributions of FVC extraction error
按上述精度分析方法,分別對在Lab顏色空間(a)、RGB顏色空間(2G-R-B)、HIS顏色空間(H)中基于動態分類閾值和固定閾值-3.78、0.06、0.13的棉花植被覆蓋度提取結果進行了誤差計算,并繪制總體提取誤差分布圖,如圖7所示。由圖7可知,相比于RGB(2G-R-B)顏色空間和HIS(H)顏色空間,基于Lab(a)顏色空間的棉花覆蓋度提取精度最好,通過高斯分布擬合求解動態閾值和以-3.78為固定閾值的平均提取誤差分別為0.011 1和0.009 4,固定分類閾值的提取效果更好,誤差降低了0.001 7。相比于動態閾值,固定閾值的提取誤差分布更接近0,且較大的誤差出現的概率較低。
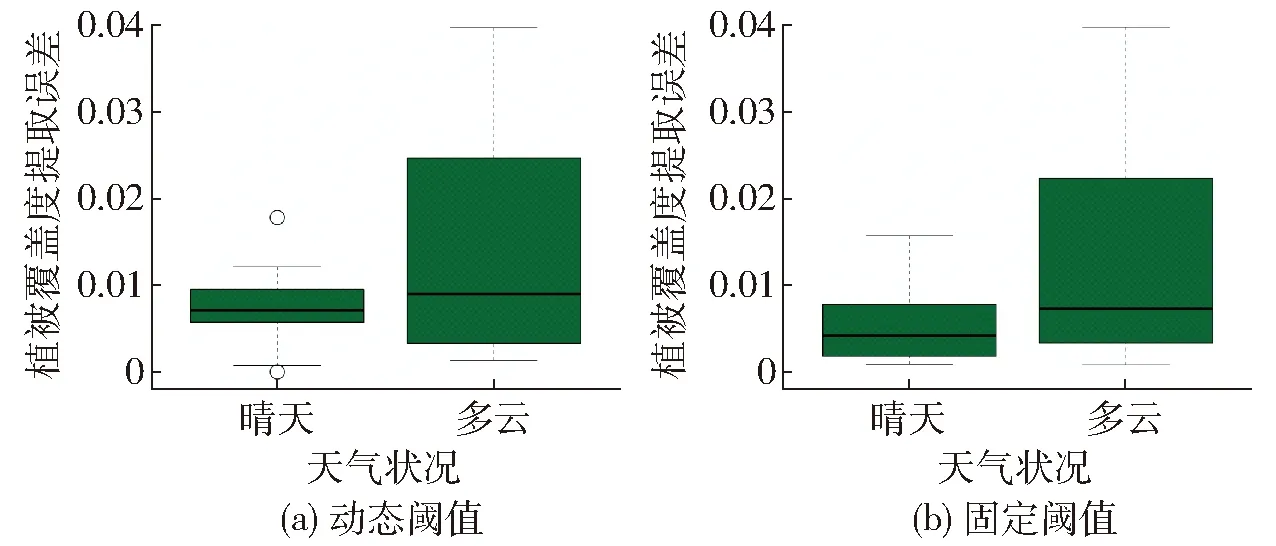
圖8 不同天氣的植被覆蓋度提取誤差Fig.8 FVC extraction error under different weathers
圖8和圖9分別為在Lab(a)顏色空間上應用非線性最小二乘算法進行高斯分布擬合的棉花覆蓋度提取誤差,按照圖像采集時天氣狀況和采集時刻進行分類的對比分析圖。由圖8和圖9可知,在不同天氣狀況(晴天和多云)與不同采集時刻(10:00、12:00和15:00)等不同光照條件下,基于Lab(a)顏色空間應用動態閾值時棉花覆蓋度平均提取誤差分別為0.007 3、0.014 2、0.020 2、0.007 3和0.004 1,應用固定閾值-3.78時棉花覆蓋度平均提取誤差分別為0.005 6、0.012 5、0.018、0.005 6和0.003 5,具有較小的平均提取誤差,不超過0.0202%,且相比于動態分類閾值,應用固定分類閾值時提取精度更好。
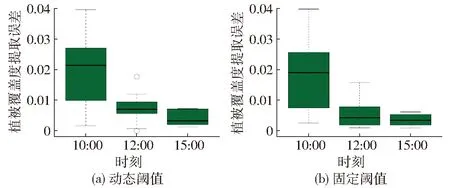
圖9 不同時刻的植被覆蓋度提取誤差Fig.9 FVC extraction error at different times
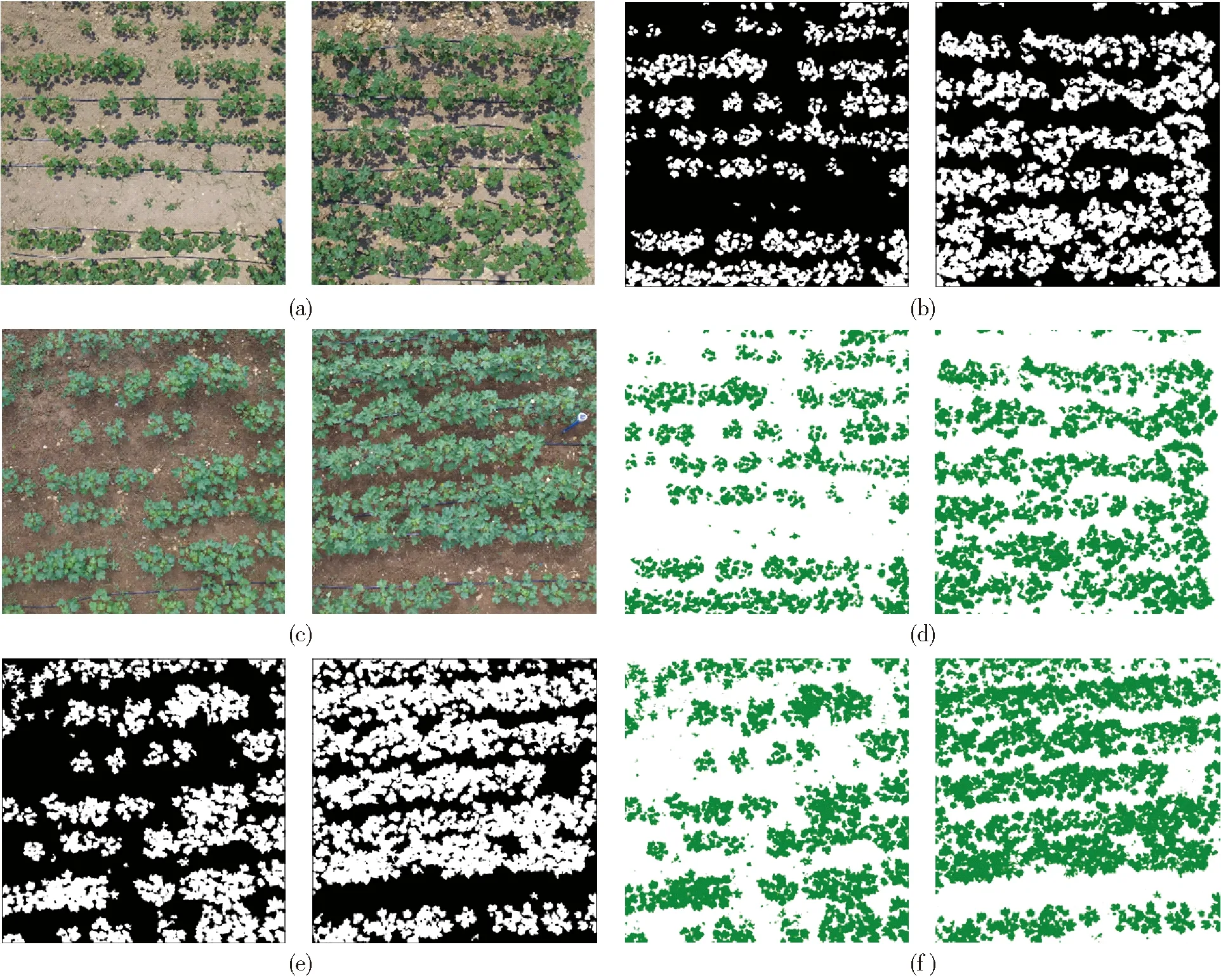
圖11 基于UAV圖像的棉花植被覆蓋度提取結果Fig.11 FVC extraction results of cotton based on UAV images
由前文可知與晴天相比,在多云天氣下采集的棉花可見光圖像中只包含棉花和土壤兩部分,地物類型分布更為簡單,其應具有較小的提取誤差,而由圖8可知,多云天氣下提取誤差較大。多云天氣下采集的數據包括2017年6月18日15:00和2017年6月30日10:00,由圖9可知,與晴天(2017年7月2日12:00)相比,2017年6月18日15:00采集數據的提取誤差較小,而2017年6月30日10:00采集數據提取誤差的異常增大,進而造成多云天氣下的提取誤差較大。經過分析發現,2017年6月30日10:00采集棉花可見光圖像中存在大量枯萎的葉片(圖10),與深色陰影相比,尚未完全干枯的落葉呈淺綠色與棉花葉片更為相似,即與晴天相比多云天氣下采集的圖像中地物類型更為復雜,從而造成提取誤差偏大。

圖10 包含枯葉的棉花圖像Fig.10 Cotton image containing dead leaves
綜上所述,相比于2G-R-B指數和H通道,a通道對綠色植被的識別能力最好,受不同天氣狀況(晴天和多云)與不同采集時刻(10:00、12:00和15:00)等不同光照條件的影響較小,且植被像元與非植被像元存在固定分類閾值-3.78,平均提取誤差為0.009 4,更適合提取棉花覆蓋度。
2.4 基于無人機可見光遙感的棉花植被覆蓋度提取
圖11為基于單幅無人機可見光遙感影像在a通道應用固定閾值的方法得到的兩種天氣、兩種土壤濕度和兩種不同棉花覆蓋度的提取效果。圖11a、圖11b、圖11c分別為晴天及干燥土壤條件下的原始圖像、覆蓋度提取結果和監督分類結果;圖11d、圖11e、圖11f分別為陰天及濕潤土壤條件下的原始圖像、覆蓋度提取結果和監督分類結果。
為了更好地評價該方法結合無人機可見光遙感技術進行棉花覆蓋度提取的效果,在兩次采集的280幅無人機可見光遙感影像中各隨機選取12幅,共24幅進行支持向量機的監督分類,并按上述精度分析方法進行誤差計算,提取誤差分布圖如圖12所示。由圖11和圖12可知,棉花覆蓋度的總體平均提取誤差為0.012,晴天和干燥土壤條件下的平均提取誤差為0.011 4,多云和濕潤土壤條件下的平均提取誤差為0.012 6,提取誤差較小。因此,可以認為基于兩種天氣和土壤干濕情況下采集的棉花蕾期無人機可見光遙感影像在a通道的分布情況,結合固定閾值的方法可以較好的提取棉花覆蓋度。

圖12 基于UAV圖像的棉花植被覆蓋度提取誤差分布Fig.12 FVC extraction error distributions of cotton based on UAV images
采用a通道與固定閾值相結合的方法,對2017年7月6日采集的無人機可見光遙感圖像進行處理得到的試驗地棉花總體植被覆蓋度情況如圖13所示。由圖可知,結合無人機可見光遙感技術和棉花在Lab顏色空間a通道上的提取閾值,可以精確地在低空無人機遙感尺度上提取棉花覆蓋度。

圖13 棉花植被覆蓋總體分布圖Fig.13 Overall distribution diagram of FVC of cotton based on UAV orthophoto image
3 結論
以苗期和蕾期的棉花為對象,提出了一種基于Lab顏色空間a通道的受不同光照條件影響小且分類閾值波動小的棉花覆蓋度提取方法,并成功將該方法與無人機可見光遙感技術相結合,提高了方法適用性及作業效率,降低了數據采集成本及勞動強度。研究結果表明:
(1)苗期和蕾期的棉花可見光圖像中,植被與非植被像元在Lab(a)顏色空間、RGB(2G-R-B)顏色空間和HIS(H)顏色空間呈現高斯分布,可以通過非線性最小二乘算法進行高斯分布擬合。
(2)通過分析地面可見光遙感圖像在3個通道的動態分類閾值分布情況,發現植被像元與非植被像元的分類閾值分布范圍較為集中,利用動態閾值的平均值-3.78、0.06、0.13可以較好地提取棉花植被覆蓋度,相比于RGB(2G-R-B)顏色空間和HIS(H)顏色空間,Lab(a)顏色空間對綠色植被的識別能力最好,更適合提取棉花植被覆蓋度。
(3)所提出的棉花覆蓋度提取方法受天氣狀況(晴天和多云)與采集時刻(10:00、12:00和15:00)等不同光照條件的影響較小,可以通過a通道中固定閾值-3.78提取棉花覆蓋度,平均提取誤差為0.009 4。
(4)將該方法應用到無人機尺度時,同樣可以較好地提取不同天氣狀況(晴天和多云)和不同土壤干濕類型的棉花覆蓋度,且總體平均提取誤差為0.012。
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46