基于自抗擾理論的PMSM 電流環控制算法
2018-10-20 06:56:58王福欣郜世杰
上海船舶運輸科學研究所學報 2018年3期
王福欣, 郜世杰
(1.上海船舶運輸科學研究所航運技術與安全國家重點實驗室,上海200135;2.海軍駐廣州地區軍事局,廣州510000)
0 引 言
永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)伺服控制系統一般采用三閉環結構(即速度環、位置環和電流環),其中電流環作為最內環結構,用來保證定子電流對電流指令的快速準確跟蹤,其控制性能直接影響著位置環和速度環的控制性能,對于整個電機的控制而言具有重要作用。目前在PMSM的磁場定向控制中,通常采用比例-積分-微分(Proportion-Integral-Derivative,PID)控制器分別對旋轉坐標系的d軸和q軸進行控制,控制過程簡單,容易得到實踐[1]。
隨著電路電子技術的發展,PID控制器在控制電流方面逐漸暴露出電流波動性較大、抵抗擾動的能力較差和穩定性不足等問題。近年來,越來越多的電流控制算法被提出。例如:文獻[1]提出雙PI解耦控制的方法,可提高控制器的魯棒性,但雙PI參數眾多,很難調節到最優;文獻[2]提出用前饋解耦控制代替電流反饋解耦控制,可消除電流誤差,提高跟蹤性能,但受電機參數的準確度影響,魯棒性較差;文獻[3]提出用模糊PID控制器代替傳統的電流環PID控制器,可解決參數實時整定的問題,但模糊PID控制器的參數主要是靠經驗獲得的,且運算量太大;文獻[4]提出電壓前饋解耦與模糊PI相結合的方法,使得控制器具有自適應參數調節能力,但參數同樣依賴于經驗,控制效果很大程度上取決于經驗水平;文獻[5]和文獻[6]提出采用內模和滑模的結構進行電流控制,可提高系統的響應速度和穩態性,但也存在穩態誤差;文獻[7]提出基于模型預測控制的電流控制策略,可有效提高電流的動態性能,但控制器的實現比較復雜。
本文以PID控制的PMSM模型為基礎,提出一種基于自抗擾理論的PMSM電流環控制算法,采用自抗擾控制器(Active Disturbances Rejection Controller,ADRC)[8-11]取代PMSM q軸電流環的PID控制器,減小超調,增強抵抗擾動的能力,提高穩定性。通過仿真試驗驗證該算法的正確性。
1 ADRC的設計及分析
ADRC的設計主要包括安排過渡過程部分的設計、擴張狀態觀測器部分的設計和誤差反饋部分的設計等3部分。由此,ADRC主要由跟蹤微分器、擴張狀態觀測器和非線性誤差反饋等3部分組成。為降低系統的復雜度,減少計算量,控制器一般采用簡單的一階ADRC,可建立ADRC模型為
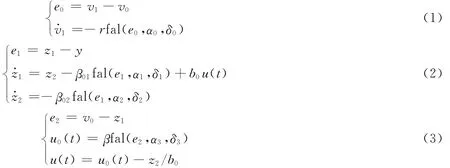
式(1)~式(3)中:v0為目標信號;v1為系統的跟蹤信號;y為實際的測得的信號;e0為系統實際行為與期望目標之間的差值;e1和e2為擴張狀態觀測器估計的變量誤差;r為非線性函數的時間尺度;z1和z2為擴張狀態觀測器擴張生成的狀態變量;β01、β02和β為擴張狀態觀測器的參數;u0(t)為擴張狀態觀測器輸出的中間變量;u(t)為最終輸出的控制變量;b0為放大系數。
上述函數fe=fal(e(t),α,δ)的表達式為

式(4)中:δ為該函數的線性段的區間長度;α為該非線性函數的參數,0<α<1;sign為符號函數。
在MATLAB/Simulink中設計一階ADRC模型(見圖1)。
給定初始信號值為0、階躍時間為1、階躍值為1.0的信號進行仿真運算,結果見圖2。
從圖2中可看出:在0~1 s內階躍值一直為0;在給定階躍值1.0處出現約9%的超調;在2.7 s時達到穩定的階躍值1.0。
佳能PowerShot D30在這組對比中并不起眼,但是它25米的下潛深度擊敗了除尼康W300之外的所有對手。2米防摔以及零下10攝氏度的防凍能力也相當可觀,不過不像同組中的奧林巴斯TG-5以及理光WG-50,D30完全沒有防沖擊設計。佳能PowerShot D30還擁有全高清視頻拍攝以及GPS定位能力。D30在頗具圓滑線條的機身前后加上了兩片增加摩擦力的膠皮以保證足夠的握持穩定性,邏輯合理的操控布局以及足夠大的按鍵尺寸使得這臺相機成為這次測試中操作效率方面最優秀的機型。考慮到水下攝影師往往需要隔著厚厚的手套進行操作,佳能的操控設計為它贏得了更高的分數。
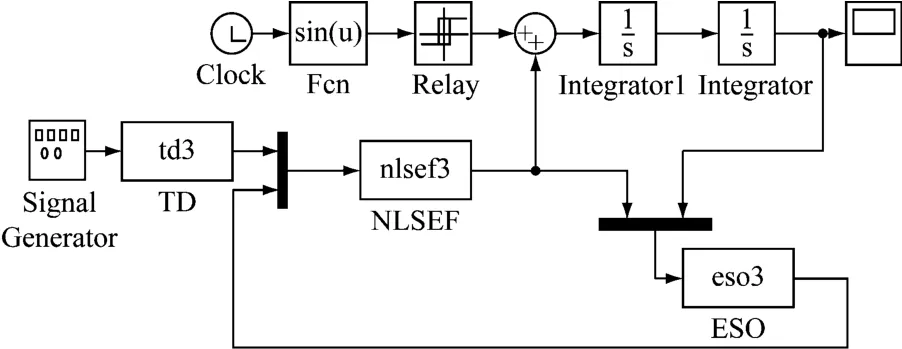
圖1 一階ADRC模型
作為對比,給定相同的階躍信號,用PID控制器進行處理,結果見圖3。
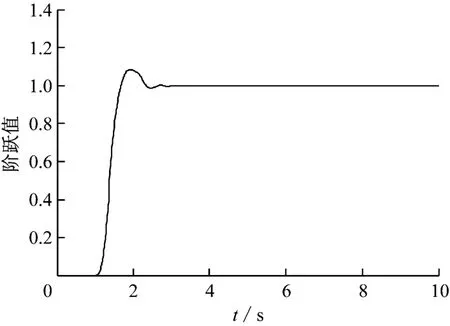
圖2 經ADRC處理后的階躍信號響應圖
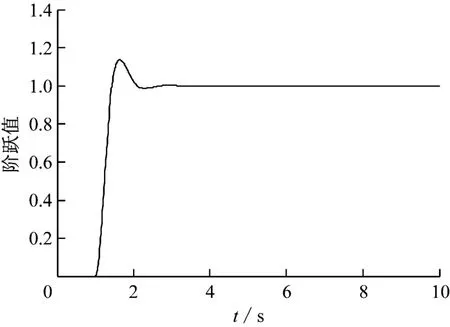
圖3 經PID處理后的階躍信號響應圖
從圖3中可看出:在0~1 s內階躍值一直為0;在給定階躍值1.0處出現約12%的超調;在2.7 s時達到穩定的階躍值1.0。
通過對比圖2和圖3可知,經過ADRC處理后的圖形比經過PID處理后的圖形更加穩定,超調優化效果尤為明顯。
2 PMSM電流環的ADRC模型設計
2.1 基于PID的PMSM矢量控制模型設計
以PMSM的矢量控制[12-16]為基礎,在MATLAB/Simulink中建立仿真模型,該模型主要由位置和速度檢測模塊,軸、速度環PI檢測器,坐標變換模塊,SVPWM模塊和逆變模塊等4部分組成(見圖4)。
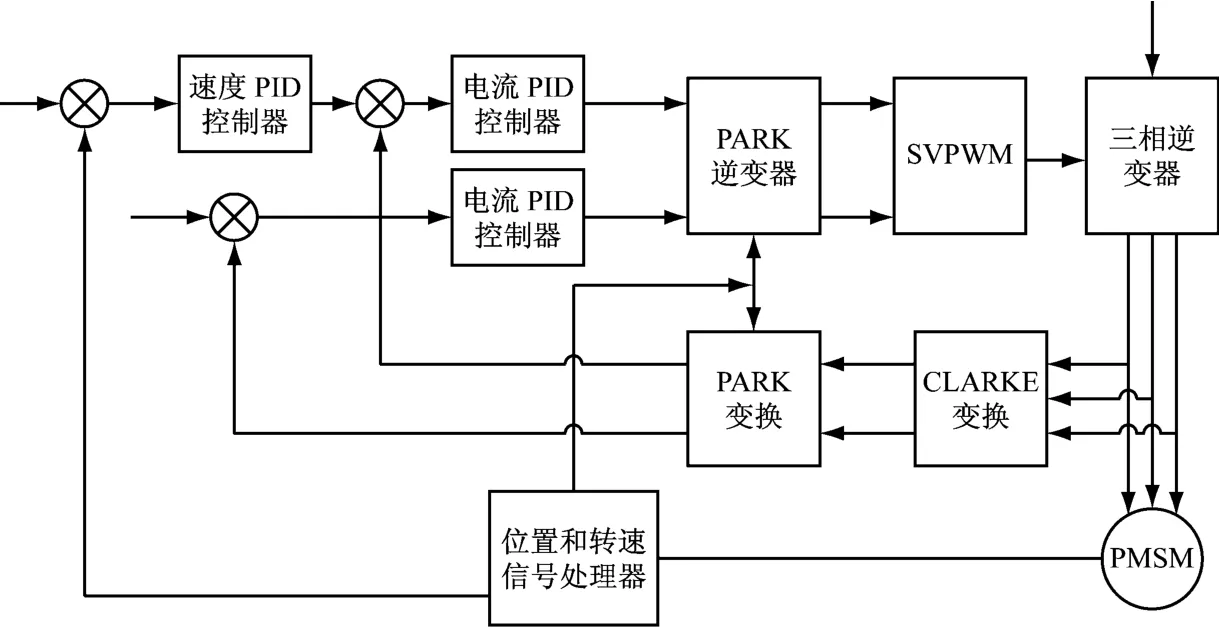
圖4 PMSM的矢量控制圖
PMSM模塊[17-19]的定子繞組共包括A相、B相、C相的輸入和負載轉矩輸入Tm等4個輸入端,大體上按照星形連接。輸出參數包括:定子三相電流iA、iB、iC,A;轉子機械位置角θThetam,rad;電磁轉矩Tm,N·m;轉子角速度ωr,rad/s。
2.2 基于ADRC的PMSM矢量控制模型設計
用一個一階ADRC控制器替換PMSM矢量控制圖中q軸的PID控制器,進行PMSM q軸的ADRC伺服控制設計,在MATLAB/Simulink中建立模型圖見圖5。
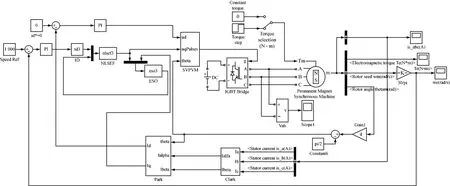
圖5 PMSM q軸的ADRC伺服控制設計模型圖
3 與PID控制結果對比分析
仿真試驗的參數設置為:電壓U=300 V;電動機功率P=1.1 k W;定子繞組電阻R=2.875Ω;d相繞組自感與q相繞組自感相等,Ld=Lq=8.5×10-3;轉子磁通量Ψf=0.175 Wb;轉動慣量J=8.0×10-4kg·m2;黏滯摩擦因數F=1.0×10-3;極對數Pm=4。
給定轉速1 000 r/min,在t=0時啟動PMSM,初始負載為3 N·m;在t=0.04 s時,負載由3 N·m突變為5 N·m;系統仿真運行時間為0.16 s,得到電流曲線、轉矩曲線和轉速曲線對比見圖6~圖8。

圖6 P M S M仿真電流圖對比
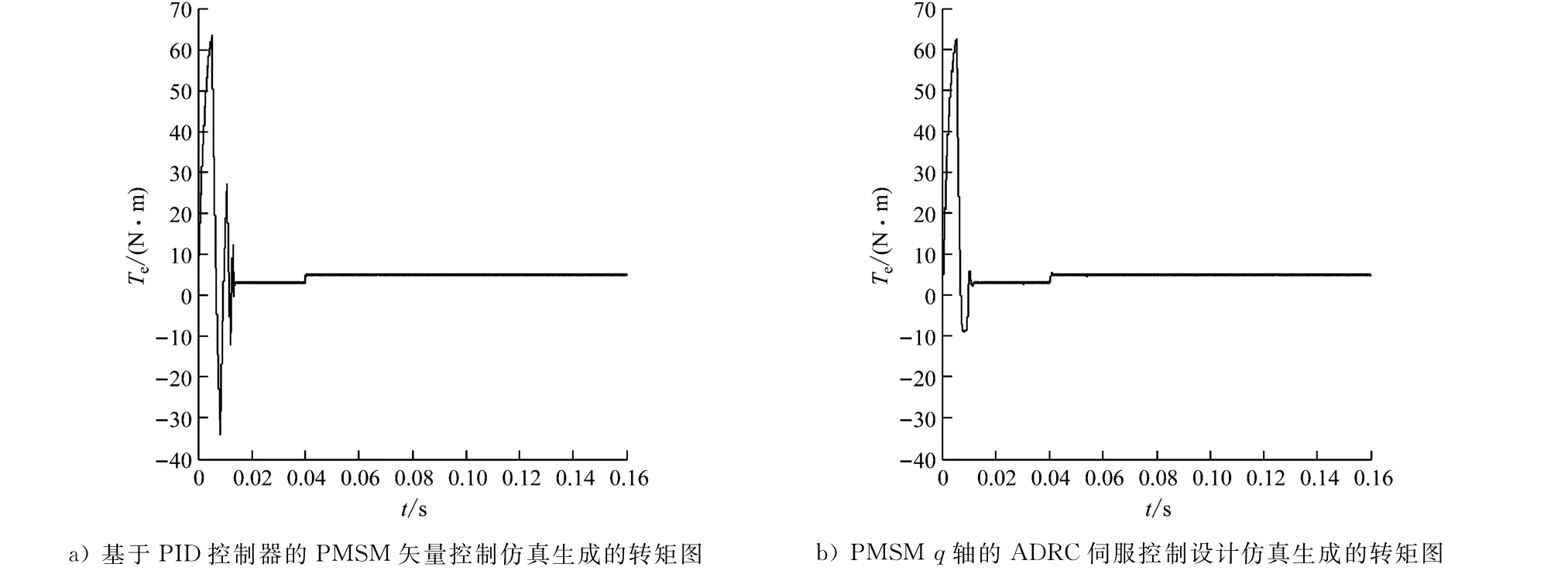
圖7 P M S M仿真轉矩圖對比
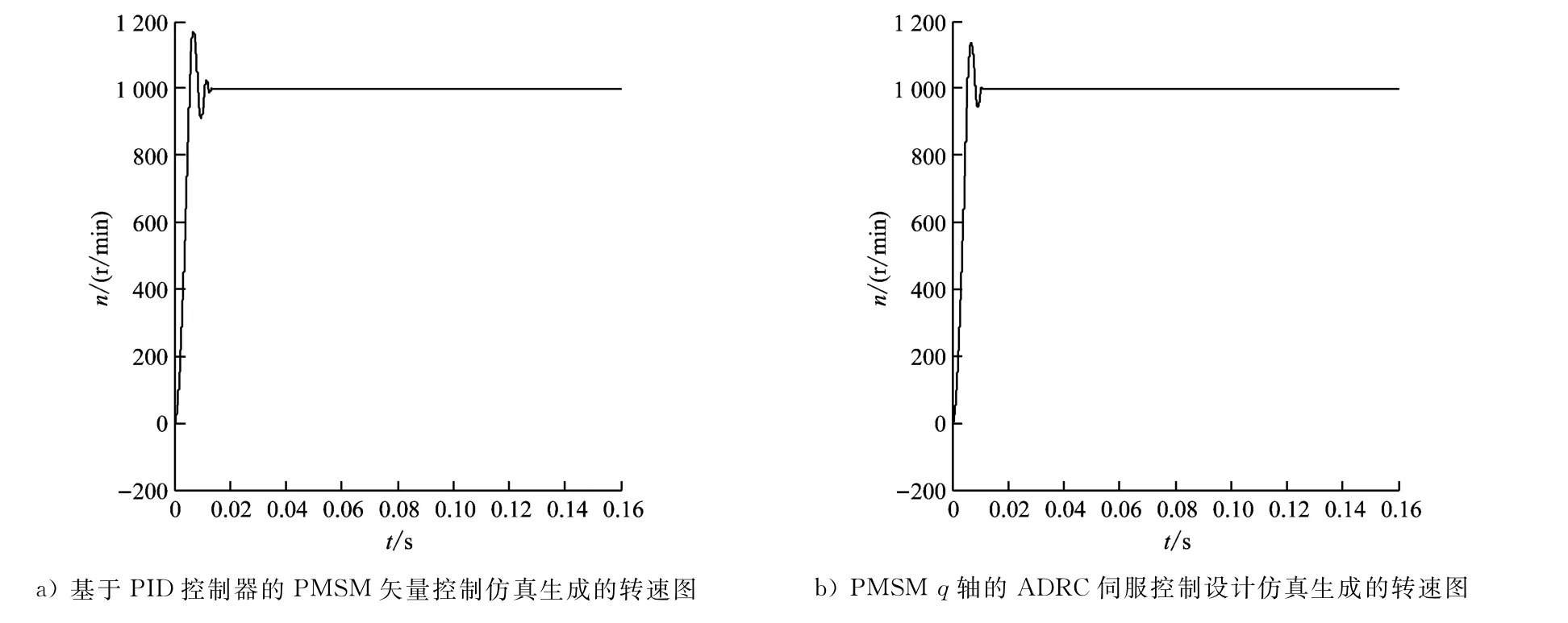
圖8 PMSM仿真轉速圖對比
從圖7中可看出,PMSM q軸的ADRC伺服控制設計仿真生成的轉矩圖與基于PID控制器的PMSM矢量控制仿真生成的轉矩圖相比,波動幅度更小,波動時間和達到穩定值的時間更短,二次波動幅值更小,穩定性和抗干擾性能更好。
從圖8中可看出,PMSM q軸的ADRC伺服控制設計仿真生成的轉速圖與基于PID控制器的PMSM矢量控制仿真生成的轉速圖相比,波動時間更短,響應速度更快,兩者抵抗負載變化的能力都比較好,轉速變化可忽略不計。
4 結 語
本文在PID控制PMSM的基礎上,提出將自抗擾理論應用到PMSM電流環的控制算法中,可優化PMSM的性能,為解決工程實踐中的問題提供參考。仿真結果表明,該控制算法具有以下優點:
1)研究是基于ADRC控制理論開展的,安排有過渡過程,能減少超調量,提高穩定性;
2)用到的ADRC可成功替代PMSM q軸電流環的PID控制器,優化控制性能;
3)電流波動更小,能提高電機的穩定性;
4)設計簡單,可應用到復雜的環境中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03