一種結合LED可見光通信技術的室內定位系統研究
2018-10-19 06:52:50洪啟宸
電子世界 2018年19期
關鍵詞:信息
洪啟宸
一、引言
現在是高速信息化的時代,位置信息對人有很重要意義。在戶外,用來定位的絕大部分應用是GPS,或利用無線基站進行定位,現在這些技術已經很成熟了。然而在室內這些技術卻不再適用,因為室內這些方式都難以搜索到信號。然而對高精度室內定位的需求卻越來越受到人們的重視,在商業活動、搶險救災燈等都有此類需要。比如當我們在地下停車庫中,我們需要快速明了地看到自己所處的位置,和出入口所在位置,從而以最短路徑到達目的地,節約時間;當我們在大商場中購物,我們常常無法快速找到自己要購買的商品,但我們有了室內定位系統,我們就可以快速找到目標商品的位置,從而更便捷地購物;當發生煤礦坍塌等意外時,如果有室內定位系統,通過礦內發出的位置信號,我們可以快速準確的得到被困人員的位置信息,救援人員可以直接根據信息展開救援,極大程度縮短救援時間,提高被困者的生還率①。
目前來說GPS在室外可以滿足人們的需要,然而在室內卻不適用,我們室內定位需要精確、實時、方便,而現在我們有些技術可以應用于室內,甚至也有已經形成的產品,比如紅外線定位,這種技術可以達到高精度,但是安裝復雜成本很高,對于工況環境要求極高的隧道來說,紅外線定位基本是不可能的②;超聲定位也可以進行高精度定位,但依然免不了收發裝置的重安裝③;WiFi定位對辦公室很普及,但由于信號不穩定,精度很低,一般只有米級同時還有較長的時間相應④。
我們不妨換一種新的思路,那就是利用隨處可見的LED燈來進行定位,我們可以把光通信的技術引用到定位中,這樣就避免了重新布置裝置,既方便安裝也節省成本。而可見光通信技術是一種成熟技術⑤,其先利用可見光通信技術傳遞信息,再利用圖像處理計算幾何坐標,從而實現高精度定位,可以實現精確實時方便的目標。基于可見光通信技術,原理是在普通LED燈上增加信息發送模塊,對LED燈閃爍頻率進行控制,將LED燈自身的坐標位置信息調制到光信號上,將編號信息編碼為0、1的信號,向接收設備發送,而接收設備上有精密光電傳感器,能把LED燈特定的閃爍頻率轉化為強弱電信號,解調出發射端傳送的特定定位信息。在接受端上還有攝像頭,可以拍攝LED燈的分布情況,通過幾何算法計算出接收端相對于LED燈的相對位置信息,結合之前得
從而更便捷地購物;當發生煤礦坍塌等意外時,如果有室內定位系統,通過礦內發出的位置信號,我們可以快速準確的得到被困人員的位置信息,救援人員可以直接根據信息展開救援,極大程度縮短救援時間,提高被困者的生還率①。
目前來說GPS在室外可以滿足人們的需要,然而在室內卻不適用,我們室內定位需要精確、實時、方便,而現在我們有些技術可以應用于室內,甚至也有已經形成的產品,比如紅外線定位,這種技術可以達到高精度,但是安裝復雜成本很高,對于工況環境要求極高的隧道來說,紅外線定位基本是不可能的②;超聲定位也可以進行高精度定位,但依然免不了收發裝置的重安裝③;WiFi定位對辦公室很普及,但由于信號不穩定,精度很低,一般只有米級同時還有較長的時間相應④。
我們不妨換一種新的思路,那就是利用隨處可見的LED燈來進行定位,我們可以把光通信的技術引用到定位中,這樣就避免了重新布置裝置,既方便安裝也節省成本。而可見光通信技術是一種成熟技術⑤,其先利用可見光通信技術傳遞信息,再利用圖像處理計算幾何坐標,從而實現高精度定位,可以實現精確實時方便的目標。基于可見光通信技術,原理是在普通LED燈上增加信息發送模塊,對LED燈閃爍頻率進行控制,將LED燈自身的坐標位置信息調制到光信號上,將編號信息編碼為0、1的信號,向接收設備發送,而接收設備上有精密光電傳感器,能把LED燈特定的閃爍頻率轉化為強弱電信號,解調出發射端傳送的特定定位信息。在接受端上還有攝像頭,可以拍攝LED燈的分布情況,通過幾何算法計算出接收端相對于LED燈的相對位置信息,結合之前得到的每個LED燈的固有位置,計算出接受位置的精確位置信息。通過可見光定位,不僅繼承了可見光通信的優點,而且對電磁波比較敏感的地方,如加油站礦井都可應用,所以本篇文章通過研究,提出了一種基于可見光通信技術的室內定位系統,并且經過一定的實驗,證明是可行,且準確便捷的。攝像頭通過拍攝LED燈的位置,電子羅盤調整獲取攝像頭傾斜角度,統一處理所得信息得到裝置位置。
二、系統設計方案
可見光定位需要利用兩方面的技術:可見光通信技術和攝像圖像處理技術⑥。利用可見光通信技術,在設備上加裝精密的光電傳感器,調制屋頂的LED燈,通過“0”“1”信息調制等方式將LED燈的參考位置做信源編碼,“0”用燈亮來表示,“1”用燈滅來表示,將LED燈編碼后的參考位置信息通過亮滅亮滅來發出信息,閃爍的頻率應在10的16次方以上,從而使人眼察覺不到LED燈的閃爍。設備上的光電傳感器接收到LED燈的閃爍,并將光信號轉換為電信號,接收端進行濾波的解調放大,獲得LED燈的參考位置坐標信息,然后將電信號傳輸到中央處理器中。在設備上加裝一個攝像頭模塊,通過攝像圖像處理技術,識別攝像頭拍攝的圖像中LED燈的位置,計算攝像頭相對于LED燈的位置,結合光電傳感器接受到的LED燈參考位置,從而得到待測點位置信息。如圖1:定位裝置上的光電傳感器接收LED燈發出的位置信息,

圖2 系統算法流程圖
為了防止攝像頭傾斜拍攝屋頂,得到不準確的信息,可以利用電子羅盤獲取角度信息,結合電子羅盤得到的角度信息、光電傳感器得到的參考位置信息和攝像頭得到的相對位置信息,計算出設備所在的絕對位置信息。根據原理,我們可以利用單攝像頭模塊獲取LED燈相對于待測點的距離信息。該模塊的基本原理為在光電二極管旁安裝一個普通攝像頭,攝像頭可以實時捕捉LED燈的圖像信息,并將采集到的圖像信息傳送至處理器中對圖像進行分析處理,圖像處理需要利用圖像濾波,圖像識別,圖像分割等技術。如圖2:一方面LED燈發出含有參考位置信息的光信號,并被光電出感器接收,轉化為電信號傳入中央處理器,另一方面攝像頭拍攝LED燈的圖像,并識別圖像中LED燈的位置,再通過電子羅盤獲取的攝像頭傾斜角度,計算出LED燈相對位置,并將信息傳入中央處理器,中央處理器通過所得信息比對得到裝置的絕對位置信息。

圖1 定位系統設計架構圖
三、定位算法的數學建模
1.定位坐標計算LED登記錄自身的位置信息來自于地理坐標系,二攝像頭計算得到的相對于LED燈的位置信息參考的是自身坐標系,當我們對圖像上LED中心坐標進行識別和提取坐標信息后,可以通過空間幾何原理和坐標系轉換獲得待測點相對于LED燈的位置信息。我們假設,地理坐標系為(u, v, w),攝像頭坐標系為(x, y, z)。而前面通過可見光通信模塊,我們已經獲得了LED燈的絕對位置坐標(uL, vL, wL)。我們可以設待測點的絕對位置坐標為(0, 0, 0),這也是攝像頭中心的位置坐標(圖3)。

圖3 室內定位坐標圖
同理,在攝像頭坐標系(x, y, z)中,我們設LED的坐標為(uL, vL, wL)。通過采集到的圖像信息,利用圖像處理算法,我們可以提取出圖像上LED燈的中心,得到LED像的坐標為(xl, yl, zl)。通過相似三角形的簡單推導,我們可以得到如下關系式:

在公式中,是攝像頭的焦距,公式整理如下:
當我們已知zL和 f,并通過識別圖像可得到坐標(xl, yl, zl)。我們可以得到LED燈在坐標系(x, y, z)中的坐標(xL, yL, zL),并很容易求得,即為在二維平面上,LED燈相對于攝像頭中心(即在坐標系(x, y, z)中的坐標為(0, 0, 0))的相對位置信息。反之,即為待測點相對于LED燈的相對位置信息,其中坐標(xL, yL, zL)僅為在攝像頭坐標系下成立,而在所有坐標系中都成立。
2.利用電子羅盤校正絕對方位
根據原理,我們還需要獲取參考位置LED燈相對于待測點的絕對方位信息,該信息是通過電子羅盤模塊的引入完成的。從原理上來看,因為LED燈相對于待測點的相對位置坐標(xL, yL, zL)是在攝像頭坐標系(x, y, z)下成立的,為了轉換成地理坐標系(u, v, w),需要一個絕對方位信息,將相對位置坐標(xL, yL, zL)轉換成地理坐標下。如圖4所示。

圖4 電子羅盤坐標圖
其中,為x軸與方位北的夾角,即將坐標系(x, y, z)逆時針旋轉θ角度,利用坐標旋轉矩陣,可以得到如下的坐標轉換公式⑦:

所以由已知的(xL, yL, zL)可以求得在地理坐標系(u, v, w)下的相對位置坐標。
3.利用傾角傳感器進行傾角修正
前面設計的室內精確定位系統要求接收端需要水平與地面,尤其是攝像頭,因為如果有過大的傾角,圖像上的相對位置就會發生很大變化,會使得定位結果完全失真。但我們考慮實際應用中,如果定位終端為手持設備,則無法保證完全的水平于地面,可能會有些許的傾角。為了更好的適用于實際需求,完善用戶體驗,我們還可以引入傾角傳感器,利用傾角傳感器采集到傾角數據,對定位的結果進行修正,消除因為傾角造成的定位誤差。
傾角修正的基本原理是:我們設俯仰角為α,側傾角為β。我們可以視為將(x, y, z)坐標系先繞x軸逆時針旋轉α角度,再繞y軸逆時針旋轉β角度,將兩者的旋轉矩陣相乘可以得到傾角補償矩陣Rg⑧:

將我們之前得到的(xL, yL, zL)坐標與Rg矩陣相乘,就可以得到修正后的坐標,之后的定位算法不變,則可以實現對定位的結果進行傾角補償。

圖5 在不同信噪比下沿確定運行軌跡的定位計算
以上內容從理論上闡述了本文設計的室內可見光定位系統的基本原理以及推導了具體的定位所需算法。利用可見光通信技術可以獲取參考位置信息,即為參考位置LED燈的絕對位置(uL, vL, wL),接著是通過攝像頭模塊獲取參考位置LED與待測點的距離信息和通過電子羅盤模塊獲取參考位置LED與待測點的相對方位信息。當有了二者的距離信息和相對方位信息,就可以獲取參考位置相對于待測點的相對位置坐標。結合參考位置的絕對位置坐標和相對于參考位置的相對位置坐標,我們就可以很容易的實現待測點的絕對位置坐標,實現了完整的高精度精確室內定位功能。
最后,考慮到實際應用中的傾斜問題,攝像頭的傾斜對定位結果有很大的影響,所以對定位結果做傾角補償是必不可少的。本章也闡述了傾角補償的基本原理,提出了修正矩陣,在定位算法中引入該修正矩陣就可以實現傾角補償功能。
四、仿真與驗證
信息。假設攝像頭在空間中運動的曲線方程已知,也就是說我們通過幾何關系可以知道運動曲線上每個點的絕對位置信息,在仿真中設定不同的信噪比,仿真不同信噪比情況下通過算法計算得到的測量點的位置信息與實際位置點之間的誤差,其計算結果如圖5所示。
從圖5中可以看出,在地信噪比時,計算點與實際預設點位置之間的誤差較大,測量點離散分布在螺旋線周圍,而隨著信噪比的升高,通過協同定位的方法可以較準確地計算出測量點的位置信息,與真實坐標相差不大,也就是在圖中表示的測量點計算得到的坐標基本接近于螺旋線在空間中的真實軌跡。需要注意的是,真實實驗中攝像頭、電子羅盤和傾角傳感器三者需要保證相對位置絕對不變,協同工作,才能保證定位結果的精確性和可靠性。假設有N個定位參考點,其位置矢量的坐標為根據參考點的位置,通過定位算法可以得到相應的N個計算點,其位置矢量的坐標為,計算點和參考點之間求歐氏距離,可以得到全空間定位時的最小均方誤差(RMSE),其計算公式如下:

1.定位誤差分析
在LED可見光協同定位的過程中,傾角傳感器必須保證攝像頭與電子羅盤處于同一平面上,并且在移動過程中,電子羅盤相對攝像頭不能有傾斜或者偏移,否則,角度的傾斜或者偏移會大大影響定位結果的精確性。因此,在仿真實驗中,我們首先假設傾角傳感器和電子羅盤都有絕對的精度,定位過程中可以給攝像頭坐標提供可靠的傾斜角和偏轉角參考。
當已知通過攝像頭獲取到的參考LED與待測點的距離信息,并且知道通過電子羅盤獲取到的參考LED與待測點的相對方位信息,之后通過傾角傳感器進行補償。在仿真中我們假設攝像頭沿螺旋形上升,在上升過程中通過接收LED傳來的自身方位信息,并且利用文中的定位和校正算法不斷計算自身的位置
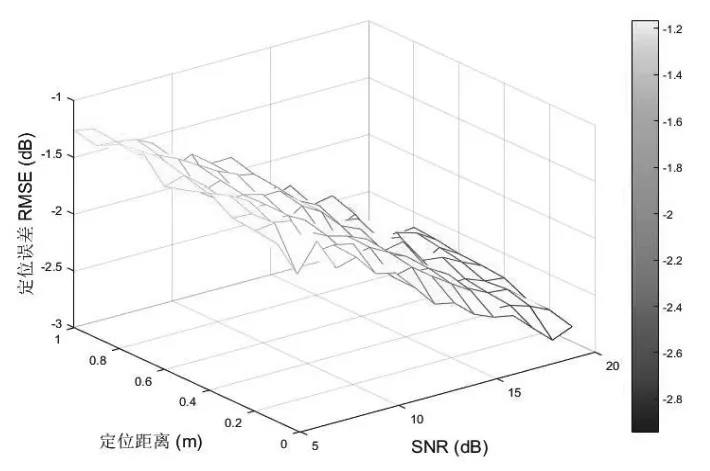
圖6 定位誤差仿真計算
從仿真實驗中可以發現,在信噪比較好的情況下,定位算法的精度上可以滿足室內定位的基本需求,誤差在厘米級別。從結果我們可以看出,當距離LED燈中心距離小于1m時,其誤差在1cm以內。但當距離大于1m時,誤差會逐漸變大。綜合整體的誤差表現來看,在1m內的定位誤差基本不超過1cm,完全符合室內的定位需求。
2.算法局限性改進方法
室內精確定位系統可能存在以下幾個問題,針對具體問題本文也給出了相應的解決方案。
(1)攝像頭圖像問題
由于攝像頭采集的圖像問題,可能會導致LED中心提取不準,圖像中LED燈由于鏡頭和燈光的問題,容易產生花生班和大光暈的現象。究其原因,一方面是燈光前的燈罩導致了光的衍射和折射現象導致的,另一方面也可能是LED光太強,導致攝像頭對光過飽和導致的。
對于這個問題,可以采取在攝像頭上加上減光片,減少燈光射入攝像頭的亮度,也可以減弱因為衍射或反射進入攝像頭的噪聲光斑。從而大大改善了圖像采集LED圖像的質量,提高了定位結果的精確性和穩定性。
(2)多燈定位時的問題
考慮到實際應用的場景,將該系統還可以推廣到多燈定位的情況,實現兩燈之間的定位網絡的完美銜接。我們考慮當該系統需要運用于部分實際場合,要求全方位全范圍的精確定位,不能有定位盲區。這就要求該算法在多燈之間切換時能做到完美銜接。但目前本文中并沒有考慮同時接收多個燈發來的信息,所以我們需要設計新的算法,使得不丟失中心LED坐標的情況下直至成功接收到新的LED坐標。設計的解決方案需要讓攝像頭的視角足夠廣,可以同時容納至少兩個燈的圖像,再通過圖像跟蹤算法和自適應算法,跟蹤識別先前舊的LED燈作為中心LED。直至接收到新的LED發來的坐標信息,再將中心LED燈坐標更新,同時攝像頭默認新的LED燈為中心LED燈。這樣就可以實現兩個燈之間的完美銜接,做到無盲區的定位功能,這也是基于本文出發未來的研究方向。
五、結論
在本文當中,我們提出了利用LED陣列和圖像傳感器進行室內定位的算法。白LED被用作光發送端,并且至少有三個空間上相互隔開的不共線的LED燈發出已知的位置信息。處于待測位置的圖像傳感器接收并解調通過鏡片的光信號。然后運用幾何關系計算出未知的位置。本文還對算法中的數學關系式進行深入的探討。還分析解釋了一系列的仿真結果來理解和展示不同的系統參數對定位精度上的影響。仿真結果顯示,通過使用這個算法,定位精度可以減小至幾厘米范圍以內。該技術還因為不需要進行角度測量從而使得設備更加簡單。但目前該技術仍然處于起步階段,許多技術細節并不成熟,所以并未得到很好的應用和推廣。這也意味著室內可見光定位技術仍然具有很大的改進和發展空間。
引文
①李志鵬.室內協同定位技術的研究與應用[D].北京郵電大學,2017.
②李立新,李建法.開放空間長陣列紅外線掃描定位系統的研究[J].工礦自動化,2009,35(06):71-74.
③肖金紅,劉智,楊陽,劉丹.基于CDMA-TDOA的室內超聲波定位系統[J].吉林大學學報(信息科學版),2012,30(02):213-217.
④黃華晉,秦建息.基于三角定位算法的WiFi室內定位系統設計[J].廣西科學院學報,2016,32(01):59-61.
⑤陳特,劉璐,胡薇薇.可見光通信的研究[J].中興通訊技術,2013,19(01):49-52.
⑥川端優,中野貴司,夏秋和弘,瀧本貴博,山崎信夫,本田大輔,玉井幸夫.圖像處理方法和圖像處理裝置[P].日本:CN107341771A,2017-11-10.
⑦葛海浪,佘勃,陶遷.基于MEMS傳感器的高精度電子羅盤研究[J].機電工程,2016,33(03):276-279.
⑧張小平,趙文耀.一種運用傾角傳感器的陣形修正算法[J].聲學技術,2011,30(04):321-324.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
