無人機(jī)偵察多目標(biāo)實(shí)時(shí)定位技術(shù)研究
2018-10-15 11:02:46蔡明兵劉晶紅
中國光學(xué) 2018年5期
蔡明兵,劉晶紅,徐 芳
(1.中國科學(xué)院 長春光學(xué)精密機(jī)械與物理研究所,吉林 長春 130033;2.中國科學(xué)院大學(xué),北京 100049)
1 引 言
無人機(jī)偵察具有實(shí)時(shí)性強(qiáng)、分辨率高、成本低、使用方便、無人員傷亡等優(yōu)點(diǎn),受到各軍事大國的廣泛重視。傳統(tǒng)的無人偵察機(jī)是利用無人飛行平臺搭載各種偵察設(shè)備,機(jī)載光電成像平臺來實(shí)現(xiàn)對地面目標(biāo)偵察定位,一般機(jī)載光電平臺采用單點(diǎn)定位法,通過姿態(tài)測量/激光測距對目標(biāo)定位。由于現(xiàn)代戰(zhàn)場態(tài)勢實(shí)時(shí)多變、目標(biāo)數(shù)量眾多,對多個(gè)目標(biāo)進(jìn)行實(shí)時(shí)定位需要多架無人機(jī)同時(shí)飛行偵察定位,或者頻繁改變無人機(jī)飛行方向及改變光電平臺空間方向(方位角、高低角),消耗大量時(shí)間同時(shí)增加了目標(biāo)定位過程的誤差。傳統(tǒng)的單目標(biāo)定位方法已經(jīng)無法適應(yīng)現(xiàn)代戰(zhàn)場的需要,現(xiàn)代化戰(zhàn)爭中,誰優(yōu)先掌握戰(zhàn)場局面信息,誰就會取得勝利先機(jī)。因此研究一種新型高效的多目標(biāo)實(shí)時(shí)定位技術(shù)是當(dāng)前亟待解決的問題。
樊邦奎、段連飛等人[15]提出無人機(jī)空間兩點(diǎn)交會的目標(biāo)定位方法,以及Gregory J.Toussaint、Pedro De Lima等人[12]提出的基于多架無人機(jī)組合目標(biāo)定位的方法,采用空間兩點(diǎn)交會是提高定位精度的有效途徑,在原有方法單點(diǎn)測量基礎(chǔ)上增加第二個(gè)測量點(diǎn),構(gòu)成空間三角形,進(jìn)行三角幾何定位,這樣需要對多架無人機(jī),多個(gè)數(shù)據(jù)進(jìn)行計(jì)算處理,既降低計(jì)算效率又增加成本。周前飛等人[14]給出一種基于像元視線向量的多目標(biāo)自主定位系統(tǒng)來同時(shí)對多個(gè)目標(biāo)實(shí)施定位。
針對上述多目標(biāo)定位實(shí)時(shí)性較差、定位誤差較大、耗資成本高等問題,本文提出了一種多目標(biāo)實(shí)時(shí)自主定位的方法,該方法主要特點(diǎn)在于利用北斗衛(wèi)星導(dǎo)航系統(tǒng)取代GPS衛(wèi)星導(dǎo)航系統(tǒng),采用三頻北斗導(dǎo)航信號載波相位測量技術(shù)取代傳統(tǒng)雙頻觀測方法,實(shí)現(xiàn)北斗定位精度,以減小無人機(jī)空中定位誤差;另一方面采用遞歸最小二乘法(RLS)對多幀圖像的定位數(shù)據(jù)進(jìn)行濾波處理,減小隨機(jī)誤差,提高定位精度。
2 多目標(biāo)實(shí)時(shí)自主定位系統(tǒng)及工作原理
空對地的多目標(biāo)定位目的是求取地面目標(biāo)三維坐標(biāo)值。如圖1所示為本文將要采用的系統(tǒng)結(jié)構(gòu),它包括如圖中的主要部分:機(jī)載光電測量平臺,搭載北斗衛(wèi)星導(dǎo)航定位系統(tǒng)及無人機(jī)空中姿態(tài)測量系統(tǒng)等。
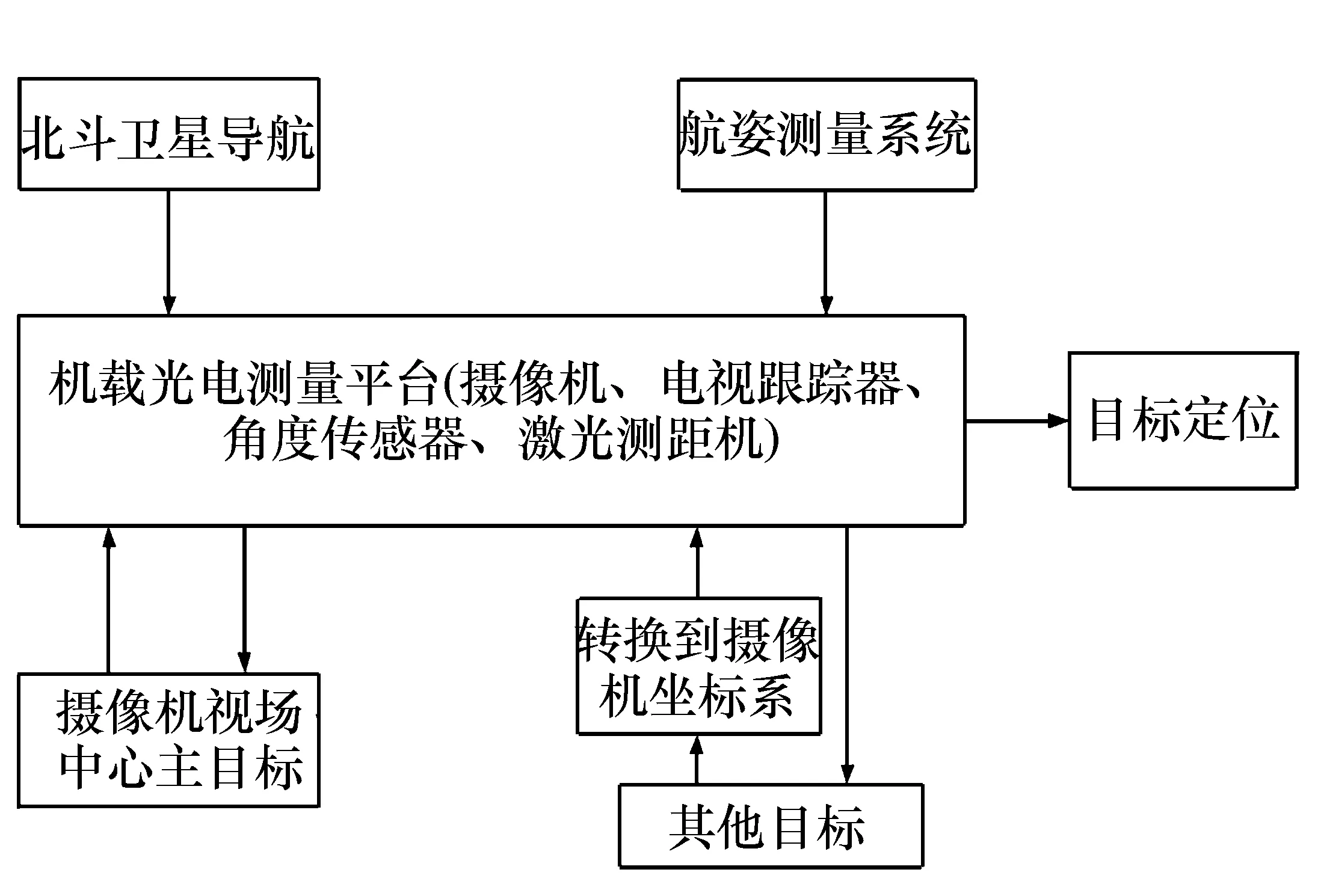
圖1 多目標(biāo)自主定位系統(tǒng)組成示意圖 Fig.1 Sketch of multi-target self-determination system
北斗衛(wèi)星導(dǎo)航定位系統(tǒng)和航空姿態(tài)測量系統(tǒng)與機(jī)載光電平臺組為一體,消除平臺對飛機(jī)的依賴性,減小誤差,實(shí)現(xiàn)目標(biāo)自主定位。
無人機(jī)對地面目標(biāo)進(jìn)行偵察定位過程中,搭載在機(jī)載光電平臺上的攝像機(jī)搜索到地面目標(biāo),并將目標(biāo)鎖定到相機(jī)視場中心,根據(jù)北斗導(dǎo)航系統(tǒng)和航空姿態(tài)測量系統(tǒng)測得數(shù)據(jù),無人機(jī)的空中三維坐標(biāo)、三姿態(tài)角以及光電平臺視軸的俯仰角和方位角、激光測距數(shù)據(jù)等信息,進(jìn)行數(shù)據(jù)處理、坐標(biāo)轉(zhuǎn)換計(jì)算出目標(biāo)的大地坐標(biāo)。求解視場中的其余目標(biāo)的大地坐標(biāo)值,根據(jù)激光測距值、數(shù)碼相機(jī)焦距及建立主次目標(biāo)幾何關(guān)系模型,計(jì)算次目標(biāo)的大地坐標(biāo)值。
3 目標(biāo)定位算法與誤差分析
3.1 機(jī)載目標(biāo)定位基本原理
首先根據(jù)航拍圖像中像點(diǎn)在相片坐標(biāo)系中的位置,計(jì)算出像點(diǎn)在攝像機(jī)坐標(biāo)系中的坐標(biāo),這里目標(biāo)位于攝像機(jī)視場中心,在攝像機(jī)坐標(biāo)系中的齊次坐標(biāo)為[xcyczc1]T=[0 0λ11]T,然后經(jīng)過從攝像機(jī)坐標(biāo)系到載機(jī)機(jī)體坐標(biāo)系的轉(zhuǎn)換,再根據(jù)載機(jī)機(jī)體坐標(biāo)系與載機(jī)地理坐標(biāo)系間的轉(zhuǎn)換關(guān)系到載機(jī)地理坐標(biāo)系,然后經(jīng)過地心地固坐標(biāo)系最后到大地坐標(biāo)系(這里是CGCS-2000坐標(biāo)系)等多個(gè)坐標(biāo)系的坐標(biāo)轉(zhuǎn)換,可計(jì)算出主目標(biāo)在大地坐標(biāo)系中的地理坐標(biāo)。目標(biāo)定位就是解決坐標(biāo)系之間關(guān)系轉(zhuǎn)換。
3.2 坐標(biāo)轉(zhuǎn)換數(shù)學(xué)模型
該系統(tǒng)使用了5個(gè)坐標(biāo)系[14],如圖2、圖3所示。 攝像機(jī)坐標(biāo)系Oc-xcyczc,載機(jī)機(jī)體坐標(biāo)系Ob-xbybzb,載機(jī)地理坐標(biāo)系Ov-xvyvzv,地固坐標(biāo)Oe-xeyeze,大地坐標(biāo)系O-LMH。其中攝像機(jī)坐標(biāo)系的原點(diǎn)在攝像中心,其橫軸(xc)和縱軸(yc)分別平行于像片平面的橫行軸(u)和縱列軸(v)。
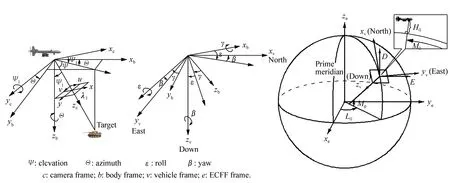
圖2 各坐標(biāo)系的定義及其相互關(guān)系示意圖 Fig.2 Schematic diagram of definition of the coordinate system and their mutual relations

圖3 目標(biāo)自主定位的坐標(biāo)轉(zhuǎn)換流程 Fig.3 Process of self-determination orientation coordinate conversion
根據(jù)我們建立的坐標(biāo)幾何轉(zhuǎn)換關(guān)系,依據(jù)坐標(biāo)轉(zhuǎn)換矩陣,依次計(jì)算主目標(biāo)像點(diǎn)在各個(gè)坐標(biāo)系中的坐標(biāo)值,最后計(jì)算出主目標(biāo)像點(diǎn)在地心地固直角坐標(biāo)系(ECEF)中的坐標(biāo),公式(1)是從攝像機(jī)坐標(biāo)轉(zhuǎn)換矩陣依次到地心地固坐標(biāo)的組合計(jì)算式:

(1)
其中,cΩ=cos(Ω),sΩ=sin(Ω)。
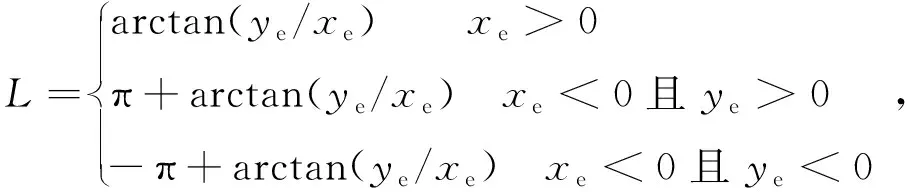
然后根據(jù)上述轉(zhuǎn)換計(jì)算公式(2)~(5)求解目標(biāo)像點(diǎn)從地心空間直角坐標(biāo)系(ECEF)到大地坐標(biāo)系(geodetic)的大地坐標(biāo)如下:
(2)
(3)

(4)
(5)
式(2)~(5)中:L、M、H分別為目標(biāo)在大地坐標(biāo)系中的大地經(jīng)度,大地緯度和大地高程。其中,在CGCS-2000大地坐標(biāo)系中,
橢球長半軸a=6 378 137.0 m;
橢球短半軸b=6 356 752.0 m;
根據(jù)以上的坐標(biāo)轉(zhuǎn)換計(jì)算過程,就可以計(jì)算得到主目標(biāo)在大地坐標(biāo)系中的坐標(biāo)。要求解像平面內(nèi)的次余目標(biāo)大地坐標(biāo),要根據(jù)建立的幾何關(guān)系模型,通過測量計(jì)算主次目標(biāo)之間的幾何角度關(guān)系計(jì)算得到次目標(biāo)像點(diǎn)在攝像機(jī)坐標(biāo)系下的三維坐標(biāo)(xcyczc),然后根據(jù)計(jì)算主目標(biāo)的過程(1)~(5)式的坐標(biāo)轉(zhuǎn)換方法計(jì)算次目標(biāo)大地坐標(biāo)。設(shè)定各目標(biāo)處于地勢平坦的大地上,光電平臺與各目標(biāo)之間的相對高度均為h,建立幾何定位模型如圖4所示。
圖4 多目標(biāo)定位模型 Fig.4 Model of multi-target orientation

h=λ1cosα,
(6)
(7)

(8)
視線向量j沿載機(jī)地理坐標(biāo)系的zv軸向下,
(9)
Rcb為從載機(jī)機(jī)體坐標(biāo)系到攝像機(jī)坐標(biāo)系的轉(zhuǎn)換矩陣,其余以此類推。
求解j在攝像機(jī)坐標(biāo)系下的坐標(biāo)為:

(10)
將式(8)求得的jvz的值代入式(9)、(10)中,求得在攝像機(jī)坐標(biāo)系下的坐標(biāo)jc,下步將jc代入上式(7)中得到數(shù)據(jù)值cosα、cosβ,前面激光測距儀測得的主目標(biāo)離光電平臺的距離λ1,根據(jù)公式(6)計(jì)算平臺目標(biāo)間的相對高度h和次目標(biāo)到光電平臺的距離λ2。根據(jù)求得的次目標(biāo)離平臺距離及其在攝像機(jī)坐標(biāo)系下的視線向量j,可根據(jù)式(11)求得次目標(biāo)在攝像機(jī)坐標(biāo)系下坐標(biāo),
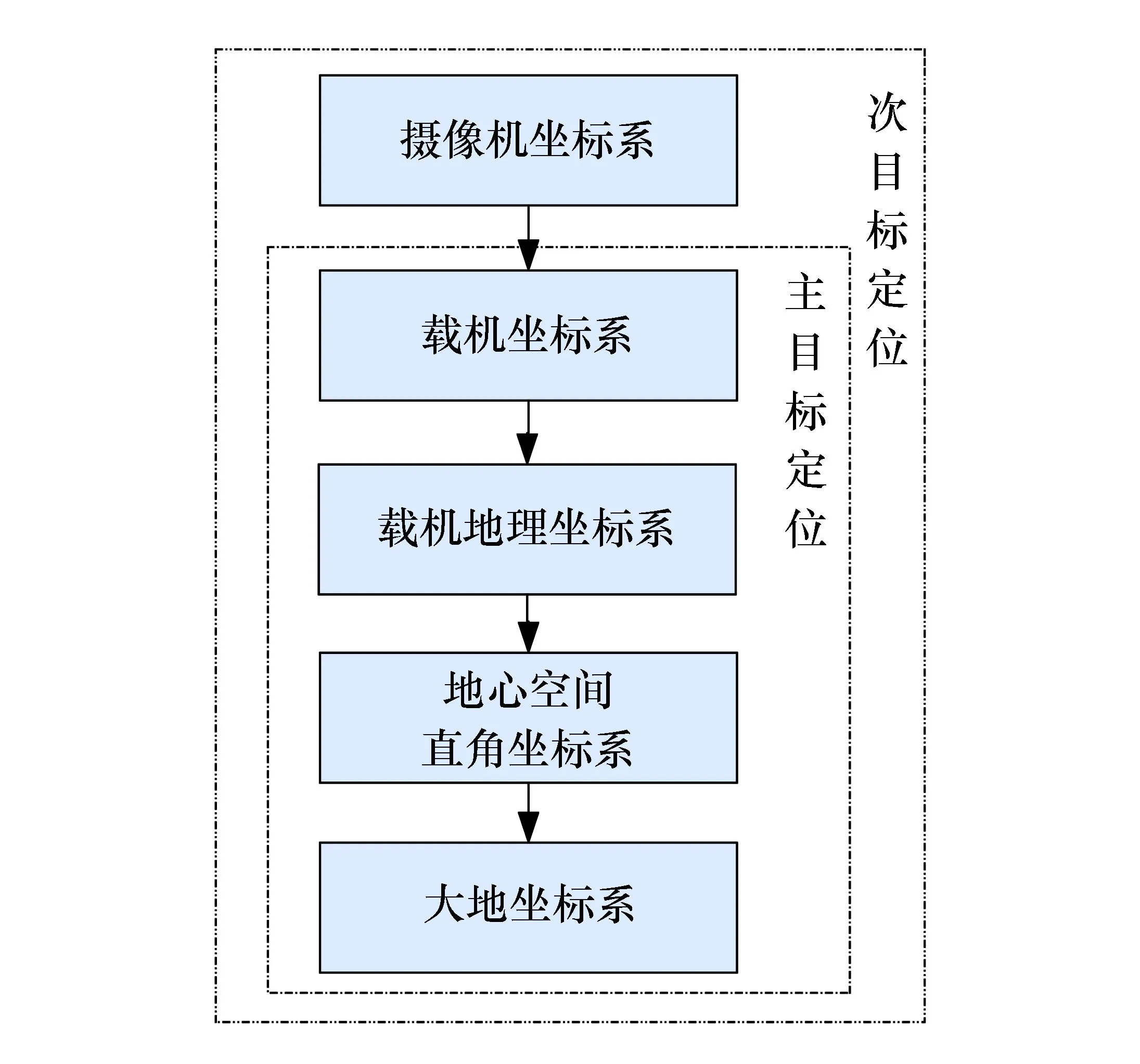
圖5 坐標(biāo)轉(zhuǎn)換流程 Fig.5 Process of coordinate conversion
(11)
綜上所述,計(jì)算次目標(biāo)大地坐標(biāo)是根據(jù)主次目標(biāo)幾何關(guān)系求出其在攝像機(jī)坐標(biāo)系下坐標(biāo),然后將該坐標(biāo)值代入(1)~(5)式計(jì)算次目標(biāo)的大地坐標(biāo),在計(jì)算多目標(biāo)坐標(biāo)轉(zhuǎn)換流程如圖5所示。
4 北斗導(dǎo)航厘米級定位精度實(shí)現(xiàn)
目標(biāo)的定位精度是無人機(jī)偵察定位系統(tǒng)的最重要指標(biāo),在無人機(jī)定位系統(tǒng)設(shè)計(jì)中占有重要地位。目標(biāo)定位誤差主要有以下幾種誤差組成:無人機(jī)空中定位誤差、無人機(jī)姿態(tài)角誤差、激光測距誤差及光軸穩(wěn)定平臺誤差等。
針對無人機(jī)空中定位誤差,衛(wèi)星導(dǎo)航系統(tǒng)扮演了重要角色,美國全球?qū)Ш较到y(tǒng)(GPS)在以往定位中起到重要作用,由于戰(zhàn)時(shí)形勢嚴(yán)峻,如果單純依靠GPS定位,將會處處受制于人。
中國研制的北斗衛(wèi)星導(dǎo)航系統(tǒng)區(qū)別于GPS的特征在于,北斗衛(wèi)星較GPS多3顆中軌道衛(wèi)星(MEO),即27顆中軌道衛(wèi)星(分布在傾角55度的3個(gè)平面上),此外還有5顆靜止軌道衛(wèi)星(GEO)和3顆傾斜同步衛(wèi)星(IGSO),北斗還具有GPS不具備的短報(bào)文通信能力。
通過解讀北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號接口控制文件公開服務(wù)信號[BDS-SIS-ICD-2.0(2013.12)],采用三頻北斗導(dǎo)航信號能夠?qū)崿F(xiàn)北斗厘米級定位,三頻北斗導(dǎo)航信號B1、B2、B3。其中B3為加密信號,使用需得到相關(guān)授權(quán),B1、B2信號表達(dá)式分別如式(11)所示:
其中,上角標(biāo)j表示衛(wèi)星編號;下角標(biāo)I表示I支路;下角標(biāo)Q表示Q支路;A表示信號振幅;C表示測距碼;D表示調(diào)制在測距碼的數(shù)據(jù)碼;f表示載波頻率;φ表示信號載波初相。

(12)

其中:
解得:
(13)
5實(shí)驗(yàn)仿真與分析
實(shí)驗(yàn)分為以下3部分:
(1)對“北斗二代”進(jìn)行星座仿真(由于采用的是MEO星座,所以這里僅對27顆MEO星星座仿真)。
(2)采用蒙特卡洛法對多目標(biāo)定位誤差進(jìn)行仿真分析。
(3)采用最小二乘算法(RLS)對圖像進(jìn)行濾波處理,減小隨機(jī)誤差,提高目標(biāo)地位精度。
實(shí)驗(yàn)一:北斗二代星座仿真
根據(jù)美國Trimble公司的 Center-Point RTX 全球跟蹤網(wǎng)于2013年春天對北斗GEO-3、IGEO-6和MEO-14衛(wèi)星三頻導(dǎo)航信號的測量成果可知,3顆北斗衛(wèi)星的載波相位觀測值均能達(dá)到±11 mm左右的測量精度,因此在無人機(jī)目標(biāo)偵察定位系統(tǒng)采用三頻北斗導(dǎo)航信號能夠使目標(biāo)定位精度有很大提高。
根據(jù)公示的北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號接口控制文件公開服務(wù)信號[BDS-SIS-ICD-2.0(2013.12)],對北斗二代星座仿真,然后基于此仿真測量無人機(jī)空中定位精度。
如圖6是對27顆MEO衛(wèi)星星座仿真。
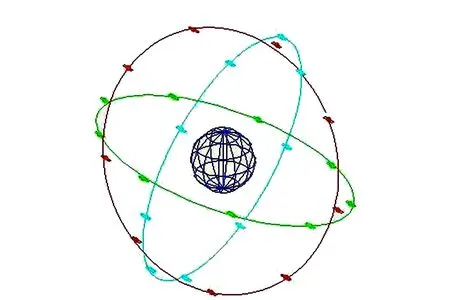
圖6 北斗MEO衛(wèi)星仿真圖 Fig.6 Simulation figure of BDS-MEO
設(shè)飛機(jī)地面之間相對高度為1 200 m,飛行位置經(jīng)度為122.672 813°,緯度為45.125 187°。
如圖7是在仿真星座模型下對無人機(jī)空中定位精度結(jié)果,北斗定位系統(tǒng)固有精度對應(yīng)經(jīng)度誤差為1×10-4(°),緯度誤差為 2×10-4(°),對應(yīng)東向誤差為10 m,北向誤差為20 m左右,大地高誤差小于10 m,授時(shí)精度為20 ns,測速精度為0.2 m/s。
以某航拍圖像數(shù)據(jù)作為實(shí)驗(yàn)對象。光電平臺
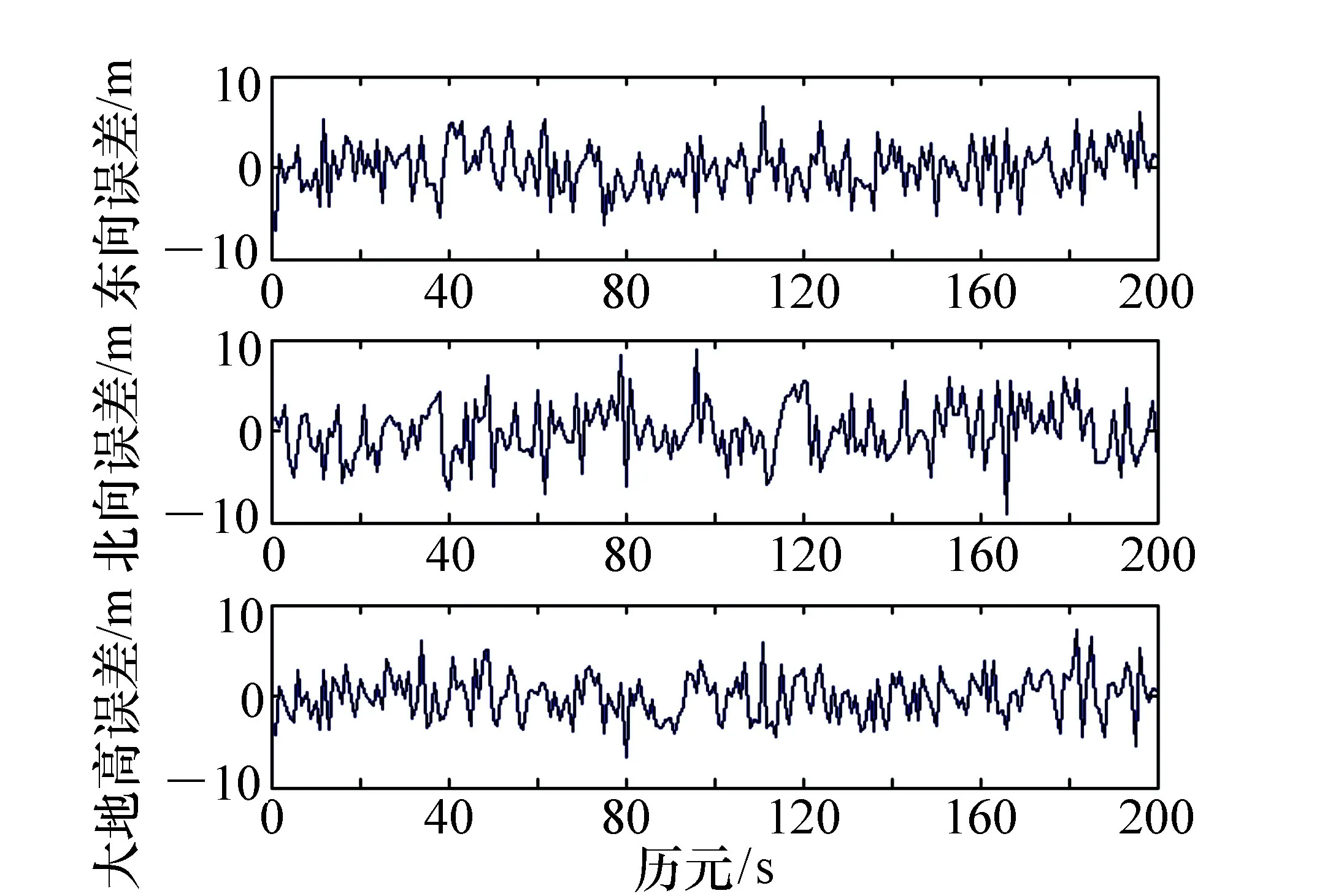
圖7 北斗仿真定位誤差 Fig.7 Localization errors of BDS
俯仰軸以水平方向?yàn)?°,垂直向下為-90°。平臺高低角為-90°(垂直下視)時(shí),平臺方位角為0°, 高低角和方位角的測量誤差為0.5 mrad(約0.028 65°),激光測距精度為5 m。
實(shí)驗(yàn)二:蒙特卡洛法多目標(biāo)定位誤差分析
蒙特卡洛法是一種通過計(jì)算大量數(shù)據(jù),隨機(jī)模擬,計(jì)算數(shù)據(jù)概率的一種方法,是一種隨機(jī)抽樣技術(shù)。利用蒙特卡洛法根據(jù)隨機(jī)數(shù)據(jù)解決很多實(shí)際計(jì)算問題。
蒙特卡洛法的理論基礎(chǔ)為大數(shù)定理和伯努利定理,根據(jù)蒙特卡洛法建立目標(biāo)定位誤差模型:
[ΔLΔMΔH]T=F′(X)-F′(X-ΔX) ,
(14)
式中:ΔL、ΔM、ΔH為目標(biāo)的定位誤差,ΔX為定位參數(shù)誤差,F(xiàn)為目標(biāo)定位模型。視場內(nèi)3個(gè)目標(biāo)的定位誤差如表1所示。

表1 多目標(biāo)定位誤差Tab.1 Error of multi-target location
實(shí)驗(yàn)三:實(shí)現(xiàn)地面多目標(biāo)定位的RLS濾波
最小二乘算法是一種通過最小化誤差的平方和找到一組數(shù)據(jù)的最佳匹配方法。最小二乘法是用最簡單的方法求得一些誤差值,使數(shù)據(jù)趨近真值。在這里采用遞歸最小二乘算法對數(shù)據(jù)進(jìn)行濾波處理,減小隨機(jī)誤差,提高目標(biāo)定位誤差。
RLS濾波算法如表2所示。
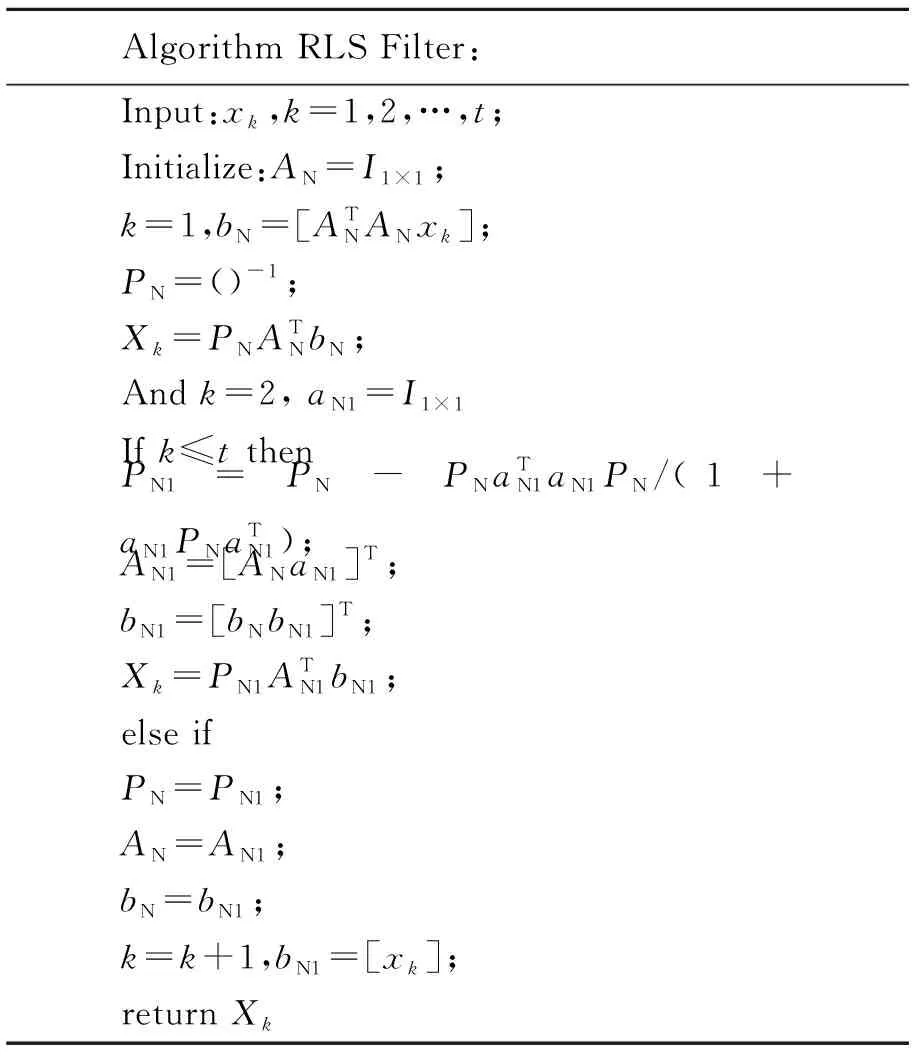
表2 RLS算法流程Tab.2 Flowchart of RLS algorithm
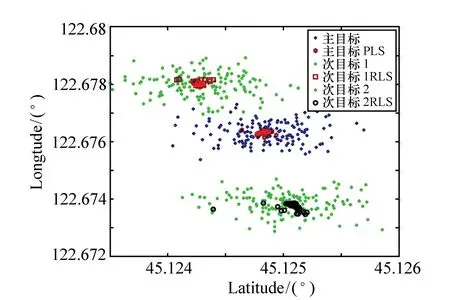
圖8 RLS濾波后的定位結(jié)果 Fig.8 Localization results after RLS filtering

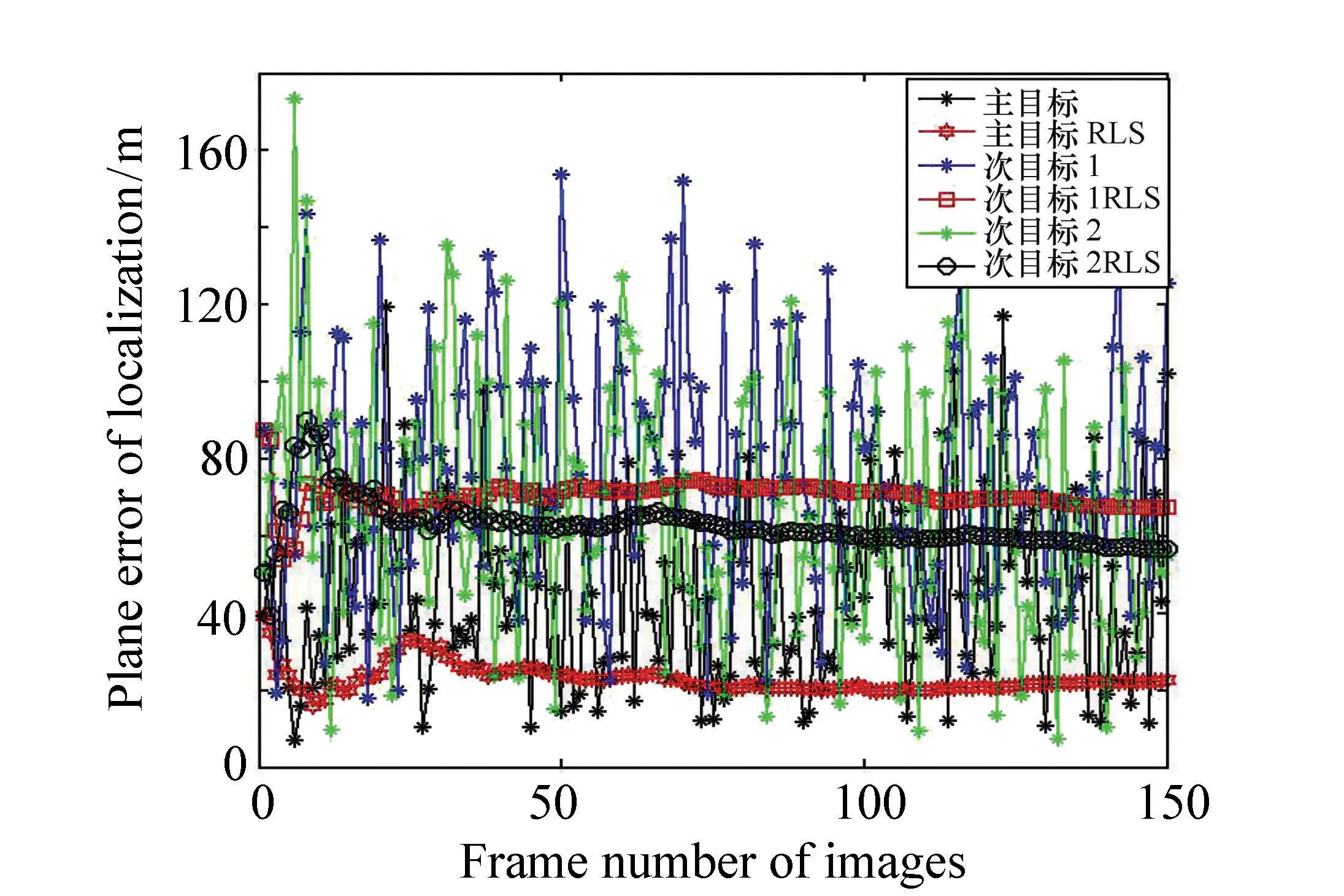
圖9 RLS濾波后的定位誤差 Fig.9 Plane localization errors after RLS filtering
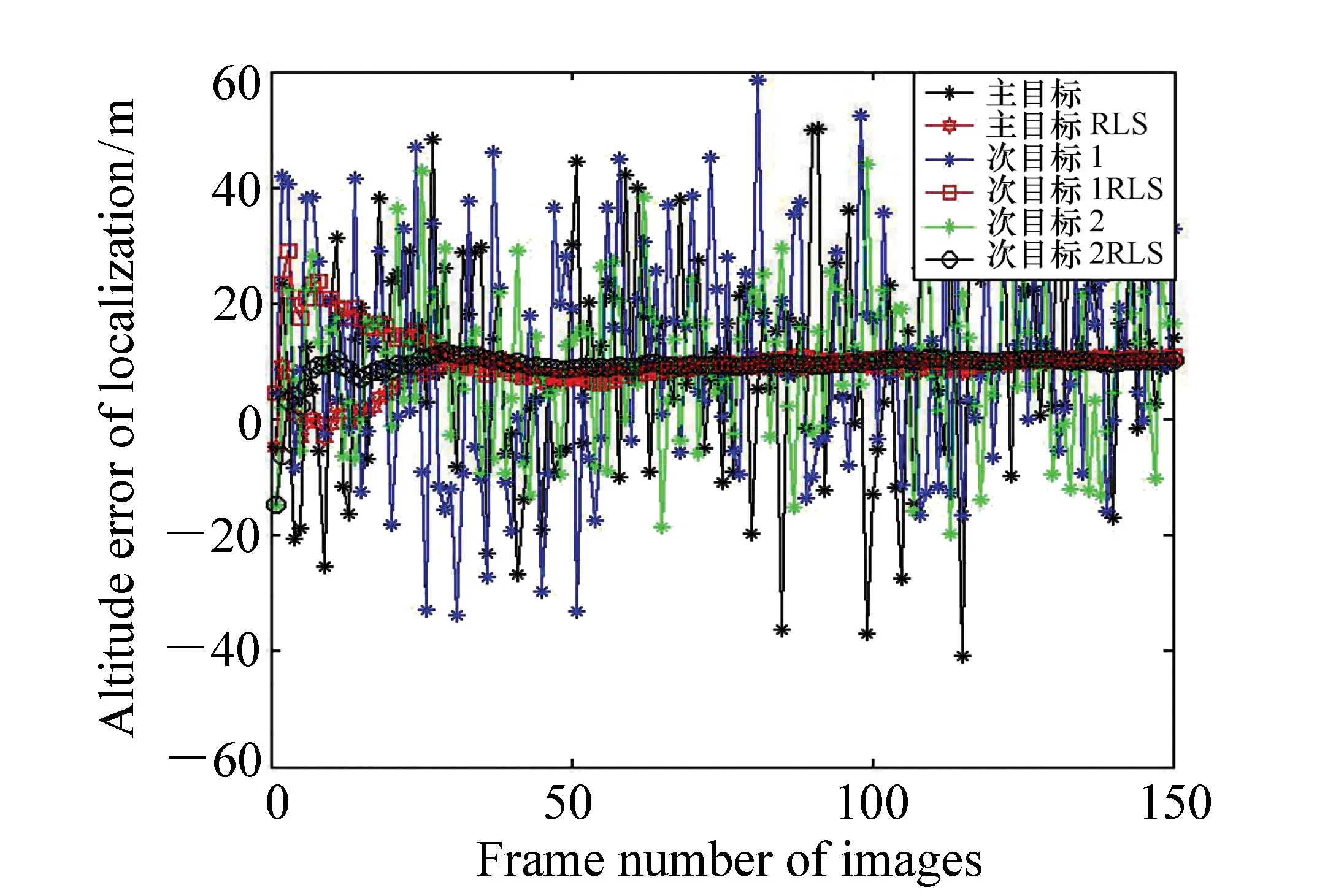
圖10 RLS濾波后的高程定位誤差 Fig.10 Altitude localization errors after RLS filtering
經(jīng)過RLS濾波處理后的各目標(biāo)定位誤差如表3所示。

表3 RLS濾波后多目標(biāo)定位誤差Tab.3 Errors of multi-target location after RLS filter

6 結(jié) 論
(1)提出了一種基于無人機(jī)偵察多目標(biāo)實(shí)時(shí)定位技術(shù),該方法只需激光測距機(jī)對地面主目標(biāo)進(jìn)行一次測距,然后根據(jù)攝像機(jī)焦距及攝取圖像上各目標(biāo)像素坐標(biāo)即可求出其余各目標(biāo)大地坐標(biāo),該技術(shù)用于地面平坦戰(zhàn)場,較之傳統(tǒng)單目標(biāo)定位,該技術(shù)能大大提高無人機(jī)偵察效率。
(2)此外,也提出了利用北斗導(dǎo)航系統(tǒng)對無人機(jī)進(jìn)行空中定位,“北斗二代”組網(wǎng)成功預(yù)示著利用北斗導(dǎo)航將會對定位精度有質(zhì)的提高。
(3)同時(shí),采用遞歸最小二乘算法進(jìn)行濾波,有效減小定位過程隨機(jī)誤差,提高目標(biāo)定位精度10 m左右。
(4)接下來要進(jìn)一步解決的問題是在地形復(fù)雜情況下如何實(shí)現(xiàn)多目標(biāo)快速實(shí)時(shí)定位。