移動地面站寬溫度跟瞄系統信標接收鏡頭
2018-10-15 11:02:20李小明張家齊白楊楊孟立新張立中
中國光學 2018年5期
關鍵詞:系統
李 響,柳 鳴,王 超,李小明,張家齊,白楊楊,孟立新,張立中
(長春理工大學 空間光電技術國家地方聯合工程研究中心,吉林 長春 130022)
1 引 言
隨著空間光學的不斷發展,光學遙感器的分辨率越來越高,星地下行通信鏈路的速率需求也逐漸提高到Gbps量級,接近射頻通信速率的理論極限,因此空間無線激光通信技術已經成為了當前空間光學研究的熱點之一。星地激光通信地面激光接收系統是開展星地激光通信鏈路不可或缺的重要組成部分,并常采用移動式地面站的方式來滿足激光通信星地鏈路高可通率的要求。由于野外環境較為復雜,在環境溫度發生改變時會使光學系統產生離焦,最終導致光電跟瞄系統跟蹤精度的降低,影響整個激光通信鏈路。在移動地面站的研制過程中,迫切需要一種可在較寬溫度范圍內工作的跟蹤鏡頭,為移動地面站光電跟瞄系統的研制提供先期技術基礎。
目前廣泛使用的溫度補償方式有3種,分別是機械被動式、光學被動式以及機電主動式[1]。機械被動式溫度補償技術[2-3]利用特定溫度性能的機械材料以熱脹冷縮的原理來移動元件,使元件的位移與溫度效應互相補償以實現無熱化設計。該方式只能調整較小的位移,由于材料種類有限,一般并不能完全達到補償的預期效果。光學被動式溫度補償技術[4-9]是利用光學材料本身溫度特性的差異以及光學特性,選擇不同光學和溫度特性的材料進行匹配,使系統的光學性能和熱性能滿足要求,缺點是某種特性的光學材料可能并不存在,使光學被動式方法產生了局限性。機電主動式溫度補償技術[10]通過驅動光學元件產生位移實現溫度補償,移動范圍大、原理比較簡單,實際應用中更容易實現。
針對移動地面站光電跟瞄系統的自身特點,設計了一種用于較寬工作溫度范圍的信標接收鏡頭,采用機電主動溫度補償方式消除了野外復雜溫度環境對于光學系統產生的不利影響,保證了光電跟瞄系統所接收信標光的成像質量,通過有限元分析軟件ANSYS、光學設計軟件CODE V進行了仿真,驗證了該系統的可行性和有效性。
2 原 理
2.1 光學系統設計
根據移動地面站跟瞄系統的指標要求,信標接收光學系統的通光口徑為150 mm,視場(跟蹤視場)為5 mrad,選用分辨率1 024×1 024,像元尺寸5 μm×5 μm的相機,單個像元的角分辨率可達到5 μrad,通過以下公式可以計算出光學系統的焦距:
(1)
式中,f為光學系統焦距;p為像元大小;n為像元數量;ω為信標接收光學系統視場角。
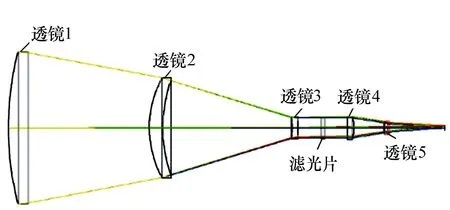
圖1 光學設計圖 Fig.1 Diagram of optical design
通過公式(1)可以計算出光學系統的焦距為1 024 mm,光學設計如圖1所示,光學系統點列圖如圖2(a)所示,最大光斑尺寸為5.18 μm,能夠滿足光斑尺寸小于5×5個像元(25 μm×25 μm)的指標要求。光學系統的MTF曲線如圖2(b)所示,接近衍射極限像質能夠滿足要求。

圖2 光學系統點列圖以及MTF曲線 Fig.2 Spot diagram and MTF curve of optical system
2.2 溫度補償方案
移動地面站主要在野外進行工作,工作環境相對惡劣,要求系統的工作溫度在-20~40 ℃范圍內。由于系統中多種材料的熱學性能存在差異,導致鏡片的折射率、曲率半徑、厚度以及間隔都會發生改變(見公式(2)~(5)),令光學系統產生離焦。
nrel(λ,T)=nrel(λ0,T0)+
(2)
R′=R+R·α0·dT,
(3)
D′=D+D·α0·dT,
(4)
L′=L+L·α0·dT,
(5)
其中:T0為參考溫度,通常為20 ℃;T為實際溫度;λ為信標光波長;nrel(λ,T0)為參考溫度下光學材料的相對折射率;dnrel(λ,T)/dT為材料的相對折射率溫度系數;R為參考溫度下透鏡曲率半徑;R'為實際溫度下透鏡曲率半徑;D為參考溫度下透鏡中心厚度;D'為實際溫度下透鏡中心厚度;L為參考溫度下支撐元件長度;L'為實際溫度下支撐元件長度;α0為材料的熱膨脹系數;dT為溫度變化量。
根據本系統的特點,選擇機電主動式溫度補償方式消除溫度對于光學系統性能的影響。由于相機體積較大,高精度位置調整較難實現,因此采用移動鏡組的方法對溫度進行補償,如圖3所示。如圖1所示,透鏡1、透鏡2尺寸較大不適合作為運動鏡組。若移動透鏡3進行溫度補償,由于透鏡2到透鏡3段光路明顯收窄導致軸向透鏡間隔公差較嚴,運動機構的執行精度會對補償效果產生直接影響;而透鏡5前后都為非平行光路,移動會令光學系統產生額外像差。因此透鏡4作為移動鏡或透鏡4、透鏡5作為移動鏡組較為合適。
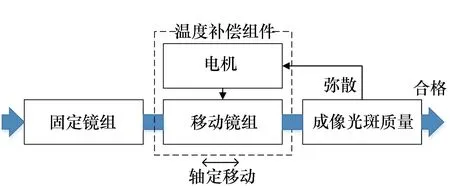
圖3 機電主動式溫度補償方式原理框圖 Fig.3 Block diagram of electromechanical active temperature compensation method
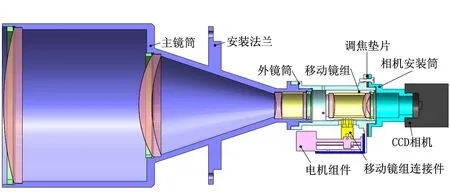
圖4 信標接收系統結構圖 Fig.4 Structure of beacon receiver system
2.3 光機結構方案
根據溫度補償方案,對系統的光機結構進行了設計,具體結構如圖4所示。
信標接收系統主要由三部分組成,分別為固定鏡組、補償鏡組、以及成像組件。固定鏡組主要由主鏡筒、透鏡1~3以及濾光片組成。如圖4所示,其中主鏡筒為本系統的主要承力元件,通過安裝法蘭與移動地面站光電跟瞄轉臺連接。采用45號鋼作為主鏡筒的材料,其線膨脹系數與光學玻璃相差不大(如表1所示),剛度較高,能夠滿足移動地面站復雜工作環境的力學要求。

表1 材料參數表Tab.1 Table of material parameter
ΔL=Δt(αs-αo)L,
(6)
其中:△L為溫度變化引起的不同材料間的尺寸變化差異;△t為溫度變化量;αs為結構元件材料線膨脹系數;αo為光學元件材料線膨脹系數;L為元件尺寸。
主鏡筒中最大透鏡直徑為150 mm,極限工作溫度與基礎溫度最大溫差為40 ℃,因此通過公式(6)可以計算出主鏡筒與透鏡之間預留的最大間隙應為0.03 mm(計算值為0.024 mm,留余量取值0.03 mm),能夠保證光學鏡片在-20~40 ℃溫度范圍內的安全使用。
補償鏡組包括外鏡筒、移動鏡組、電機組件以及移動鏡組連接件等。如圖4所示,外鏡筒通過螺紋與固定鏡組中的主鏡筒連接。移動鏡組包含兩片透鏡(在下文進行分析),通過步進電機驅動能夠在外鏡筒內進行高精度軸向移動,補償由于溫度變化導致的成像光斑彌散。補償鏡組采用鋁合金(2A12)作為材料,重量輕,經濟性較好。移動鏡組中透鏡直徑僅為25 mm,根據公式(6)可以計算出鏡筒與透鏡需留有0.02 mm間隙(計算值0.016 mm,留余量取0.02 mm)以滿足系統使用要求。
3 仿真分析
使用ANSYS有限元分析軟件對系統結構進行了有限元建模,如圖5所示,有限元模型共有232 695個節點、131 967個單元。
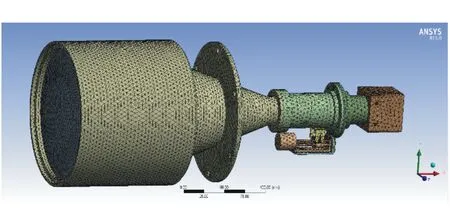
圖5 有限元模型 Fig.5 Finite element model
對系統進行了模態分析,結果如圖6所示,一階模態為370 Hz,動態剛度較好,能夠滿足移動地面站在野外復雜環境下工作的需求。
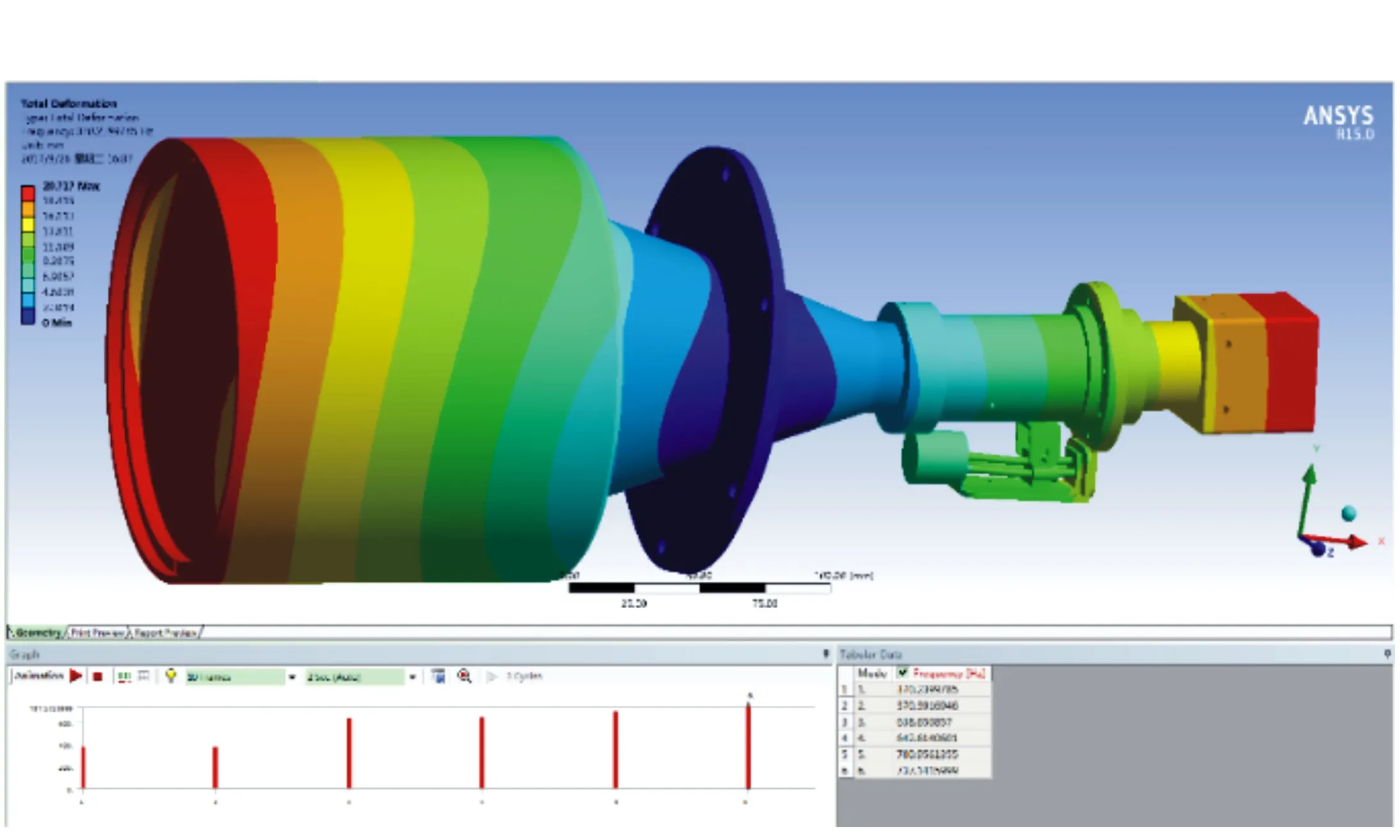
圖6 模態分析結果 Fig.6 Results of model analysis
當環境溫度降低至-20 ℃時,對信標接收系統進行了有限元分析,系統軸向變形量云圖如圖7(a)所示,透鏡間隔變化量如表2所示。透鏡1與透鏡2間距減小了0.068 4 mm,透鏡2與透鏡3間距減小了0.065 8 mm,透鏡3與透鏡4間距減小了0.042 3 mm,透鏡4與透鏡5間距減小了0.033 0 mm。當環境溫度升高至40 ℃時,系統軸向變形量云圖如圖7(b)所示,各鏡片間隔變化量如表2所示,透鏡1與透鏡2間距增加0.032 9 mm,透鏡2與透鏡3間距增加0.031 1 mm,透鏡3與透鏡4間距增加0.020 4 mm,透鏡4與透鏡5間距增加0.015 4 mm。
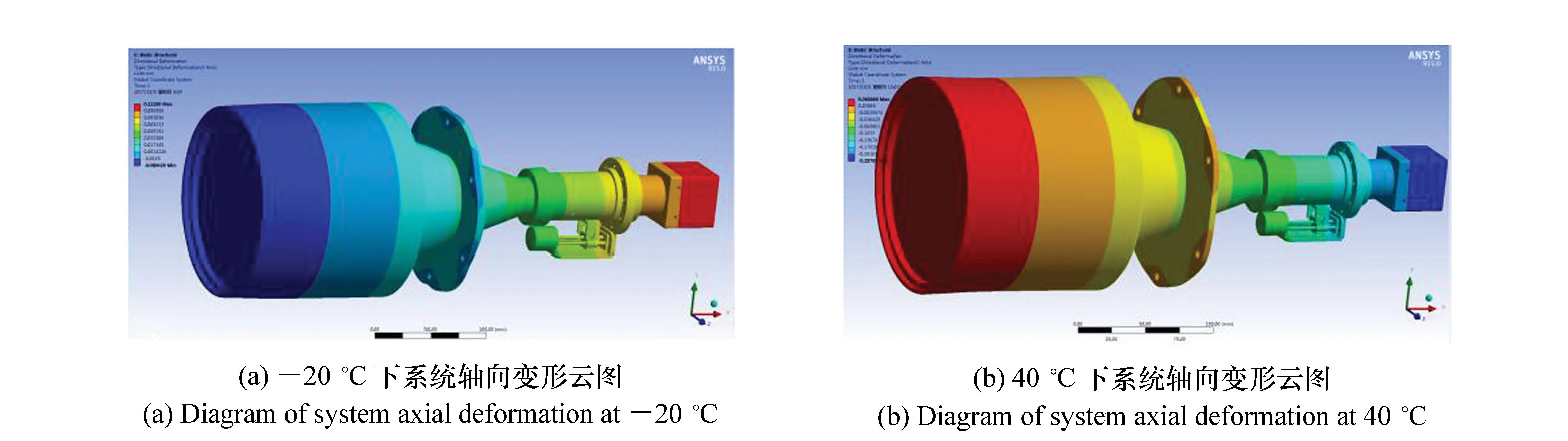
圖7 不同溫度下信標接收系統的有限元分析結果 Fig.7 Finite element analysis results of beacon receiver system at different temperatures

透鏡1-22-33-44-5-20 ℃-0.068 4-0.065 8-0.042 3-0.033 040 ℃0.03290.031 10.020 40.015 4
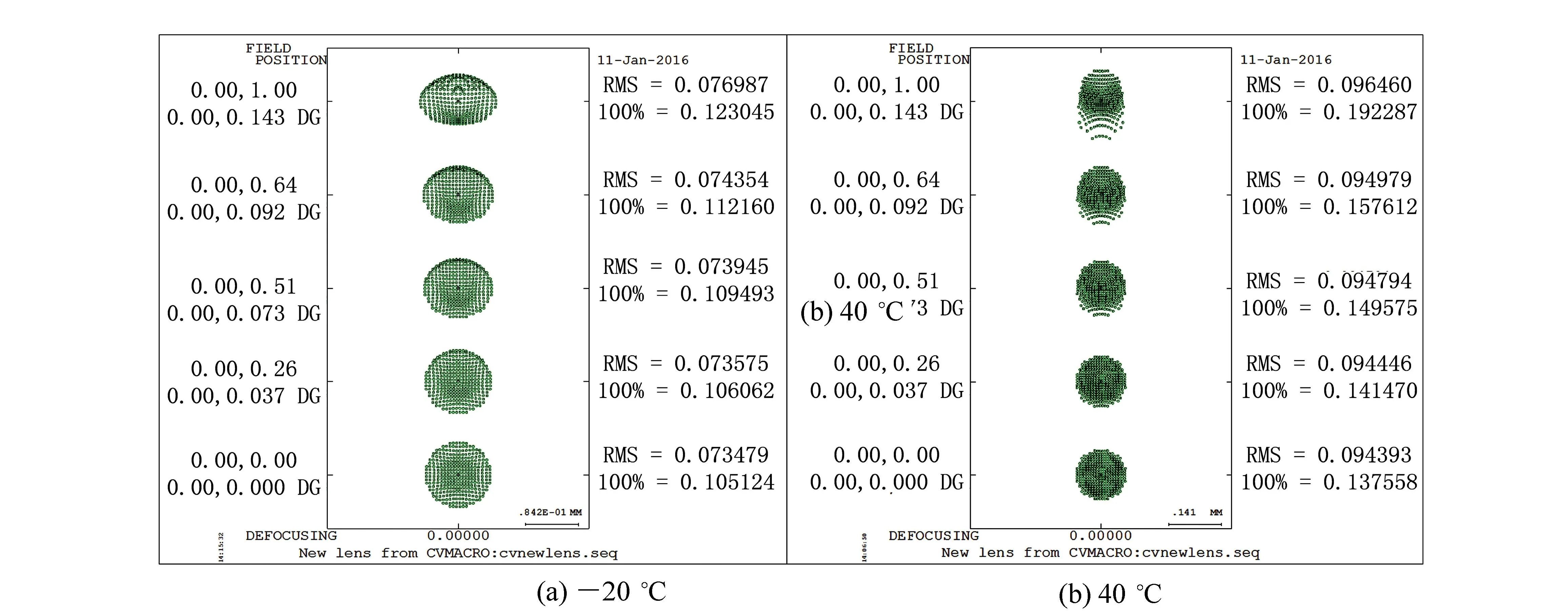
圖8 不同溫度下光學系統點列圖 Fig.8 Spot diagram of optical system at different temperatures
將上述透鏡位置的變化量輸入CODE V光學設計軟件中,對不同工作溫度下光學系統的性能進行仿真,當環境溫度降至-20 ℃時,如圖8(a)所示,該光學系統點列圖最大光斑尺寸為77 μm(邊緣視場5 mrad);當環境溫度升至40 ℃時,如圖8(b)所示,該光學系統點列圖最大光斑尺寸為96 μm(邊緣視場5 mrad)。由仿真結果可知,在工作溫度范圍內(-20~40 ℃),信標接收系統無法滿足跟瞄系統所要求的光斑尺寸不大于5×5像元(25 μm×25 μm)的技術要求,因此需要進行溫度補償,并分別針對2.2節中兩種溫度補償方案進行仿真。
當以透鏡4作為移動鏡時,向前移動0.154 8 mm時,能夠補償環境溫度-20 ℃時光學系統成像光斑的彌散情況,如圖9(a)所示,中心視場光斑尺寸為2.2 μm,邊緣視場光斑尺寸為16.7 μm,考慮透鏡移動的位置誤差(0.02 mm),如圖9(b)所示,中心視場光斑尺寸為10.1 μm,邊緣視場光斑尺寸為19.5 μm。透鏡向后移動0.193 6 mm可以補償環境溫度40 ℃時光學系統成像光斑的彌散現象,結果如圖9(c)所示,中心視場光斑尺寸為1.6 μm,邊緣視場光斑尺寸為15.7 μm,考慮透鏡移動的位置誤差(0.02 mm),如圖9(d)所示,中心視場光斑尺寸為10.8 μm,邊緣視場光斑尺寸為18.2 μm。
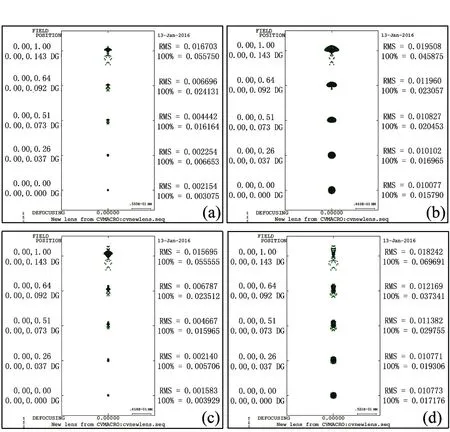
圖9 透鏡4的補償效果 Fig.9 Compensation effect of lens 4
當以透鏡4、透鏡5作為移動鏡組時,當鏡組向前移動0.695 mm時,可以補償-20 ℃時光學系統成像光斑的彌散,如圖10(a)所示,中心視場光斑尺寸為2.9 μm,邊緣視場光斑尺寸為15.4 μm,考慮鏡組移動的位置誤差(0.02 mm),如圖10(b)所示,中心視場光斑尺寸為3.2 μm,邊緣視場光斑尺寸為15.7 μm。鏡組向后移動0.885 6 mm能夠補償40 ℃時光學系統成像光斑的彌散,如圖10(c)所示,中心視場光斑尺寸為1.9 μm,邊緣視場光斑尺寸為22.1 μm,考慮補償鏡組移動的位置誤差(0.02 mm),如圖10(d)所示,中心視場光斑尺寸為3.9 μm,邊緣視場光斑尺寸為21.8 μm。

圖10 透鏡4、5的補償效果 Fig.10 Compensation effect of lens 4, 5
通過以上分析結果可知,移動透鏡4或透鏡4、5均可以補償由于環境溫度變化產生的成像光斑彌散,補償后的光斑尺寸也均能滿足系統指標要求,但是透鏡4移動的位置誤差對成像光斑的尺寸影響更大,極易導致光斑尺寸超出指標要求,因此采用透鏡4、5作為移動鏡組更加可行。
4 實驗驗證
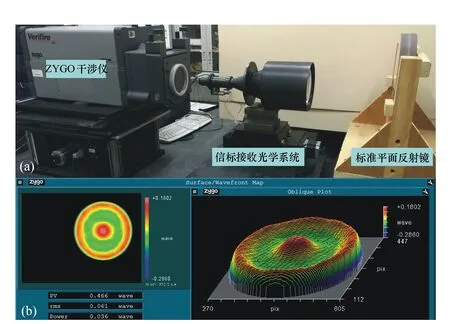
圖11 信標接收鏡頭像質檢測 Fig.11 Image quality test of beacon receiver lens
使用ZYGO干涉儀以及標準平面鏡對信標接收光學系統的波像差進行檢測,如圖11所示,檢測結果表明信標接收光學系統波像差RMS值為0.061λ(λ/16.39,λ=632.8 nm),PV值為0.466λ(λ/2.14),能夠滿足光電跟瞄系統信標接收鏡頭波像差RMS優于λ/15的指標要求。
5 結 論
本文對寬溫度范圍下工作的激光通信移動地面站信標接收鏡頭進行了研究,采用理論計算與仿真分析相結合的方法,進行了光學與光機結構的設計,對-20~40 ℃溫度條件下信標接收光學系統的成像特性進行了分析,確定了以步進電機驅動的第4、5片透鏡為移動鏡組的機電主動式補償方案,保證了寬工作溫度范圍下信標接收光學系統較為穩定的光學性能。使用ANSYS有限元分析軟件對系統進行了模態分析,結果表明系統的一階模態為370 Hz,動態剛度較好。通過CODE V與ANSYS進行聯合仿真表明,環境溫度降低到-20 ℃時,經過溫度補償后光學系統中心視場光斑尺寸為3.2 μm,邊緣視場光斑尺寸為15.7 μm。環境溫度升高到40 ℃時,經過溫度補償后光學系統中心視場光斑尺寸為3.9 μm,邊緣視場光斑尺寸為21.8 μm,可以滿足系統指標要求。使用ZYGO干涉儀對信標接收光學系統的像質進行了檢測,結果表明系統波像差RMS值0.061λ,能夠滿足系統波像差小于λ/15的指標要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32