基于MEMS傾角傳感器和薄膜壓力傳感器的人體步態監測裝置
2018-10-15 07:25:14崔建鵬江金林
中國測試 2018年8期
關鍵詞:系統
崔建鵬,曹 恒,朱 鈞,江金林,張 雨
(華東理工大學機械與動力工程學院,上海 200237)
0 引 言
人體運動狀態研究與應用較為廣泛,尤其對人體步態的研究最為突出,例如康復型可穿戴式外骨骼的姿態研究,需要建立人體步態監測系統[1]。當前步態監測系統采用光學圖像、生物雷達、MEMS傳感器3種方式。與光學圖像、生物雷達[2-4]相比,MEMS傳感器具有體積小、不受外界光線影響,穿戴方便、價格便宜等優點。因此,MEMS傳感器在兩足機器人步態研究中具有重要作用。
現有的基于MEMS傳感器的人體步態監測裝置是基于三軸向微型加速度傳感器的姿態測量系統或者足底壓力分布測量系統,通過根據測量傾角或者壓力數據劃分步態[5-8]。但目前監測系統大都采用單傳感器,提取的步態信息不全面。傳感器數據發送方式采用有線傳輸,試驗區域受限于線路長度。另外,人體在行走過程中,每一步之間存在差異,為了便于研究穿戴者步態信息,需要對其歸一化處理。而當前研究缺少對步態數據的周期歸一化[9-13]。
針對上述不足,本文設計了一種傾角傳感器和壓力傳感器組合測量的無線監測裝置。該裝置通過MEMS傾角傳感器和薄膜壓力傳感器測量下肢傾角與腳底支反力,然后搭建ZigBee無線發射節點,將試驗數據打包發送至計算機,利用Labwindows/CVI軟件[14]建立數據顯示與處理平臺,實現步態周期的歸一化處理。
1 裝置結構與原理
正常人行走過程中,各關節主要進行矢狀面上的運動,即髖關節、膝關節和踝關節的屈伸。人體步態具有周期性,從腳跟著地開始,到同一腳再次邁向前著地為止,為一個步態周期。人體步態的特征主要是左腿和右腿的髖關節與膝關節矢在矢狀面上傾角,還伴隨著腳底支反力的變化。通過研究分析,對步態的監測主要是髖膝關節傾角,另外,足底支反力可以很好地反映腳底觸地情況,對步態劃分和識別有重要作用。
本試驗系統的結構如圖1,下位機由5路傾角傳感器和一雙傳感靴組成。5路傾角傳感器分別綁縛在穿戴者的軀干、大腿和小腿上,用于測量大腿、小腿和軀干與水平面的夾角。傳感靴的鞋底放置有4個薄膜壓力傳感器,用來感知行走過程中腳與地面的相互作用力。各個傳感模塊通過CAN總線通信,協處理器將數據打包至發送區。ZigBee無線通信具有近距離、低功耗、短延時、高容量等特點,因此本試驗系統選擇其作為數據通信模塊,使數據傳輸不受監測范圍的影響。
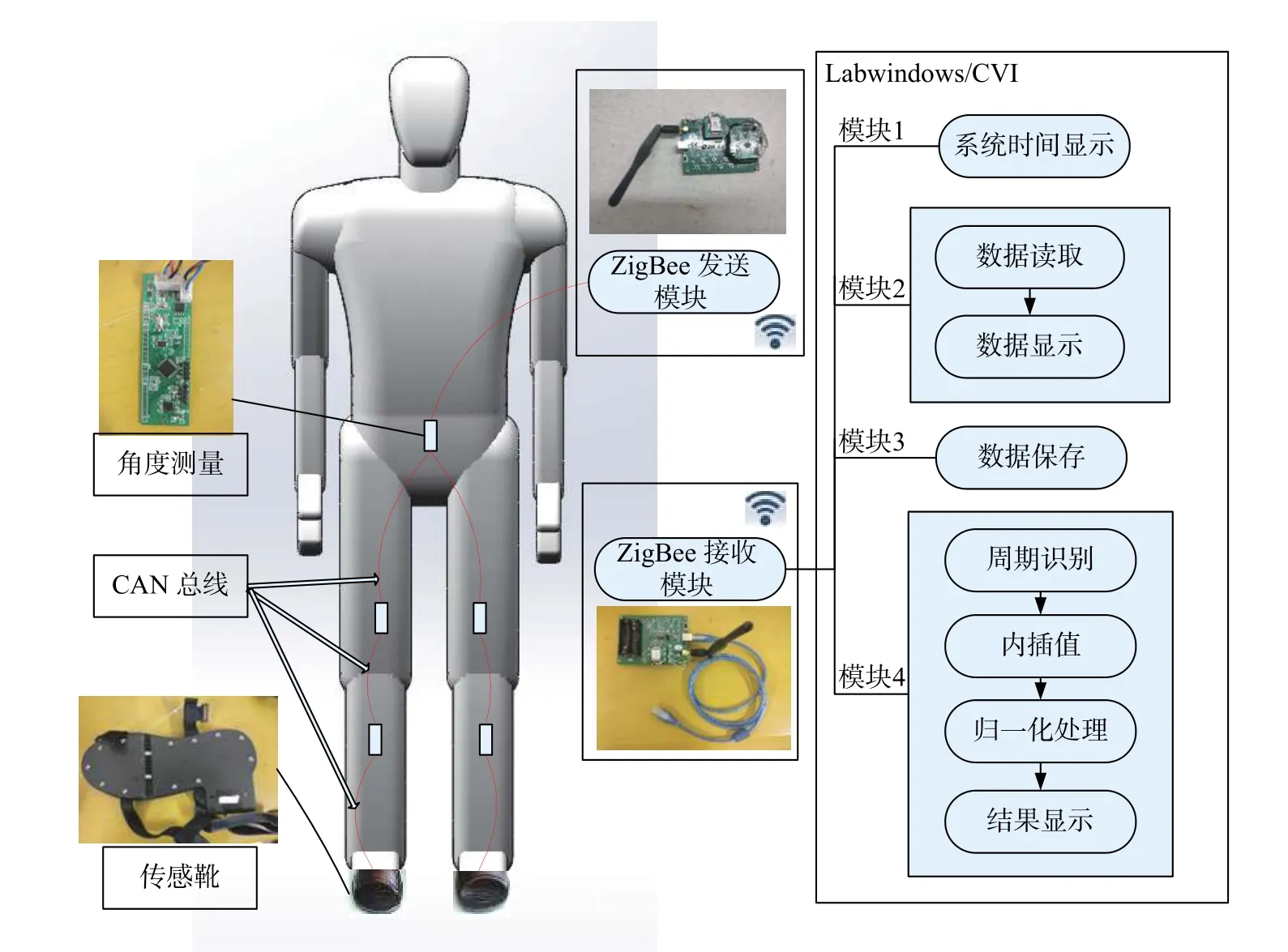
圖1 系統總體結構
本系統上位機使用CVI軟件接收數據,多線程編程實時顯示髖關節、膝關節傾角與腳底支反力,同時與數據庫建立連接,保存原始數據并且能夠回放歷史測量數據;采用多線程編程進行周期劃分識別,建立周期歸一化函數,將不同周期數據通過三次樣條插值整合為相同的周期,并且顯示保存每個點的最值與均值,方便以后進行步態劃分。
2 設計要點
2.1 下位機硬件模塊
2.1.1 傳感器
本試驗系統的傾角傳感器采用InvenSense公司生產的MPU-6050型6軸MEMS運動處理傳感器,通過內置的數字運動處理器(digital motion processor,簡稱DMP)可以精確得到芯片各測量周與基準面的角度信息。軀干傾角傳感器安裝在穿戴者腹部,大腿傾角傳感器安裝在膝蓋上部大腿的1/3處,小腿傾角傳感器安裝在膝蓋下部小腿的1/3處。在安裝該傳感器時,將芯片的測量x軸平行于矢狀面并與被測肢體垂直,y軸與被測肢體平行。通過計算大腿和軀干的傾角差值可以得到髖關節傾角,同理,通過計算大腿與小腿的傾角差值可以得到膝關節傾角。
足底支反力傳感器選用薄膜式壓力傳感器,量程為50 kg,可對任何接觸面的壓力進行靜態和動態測量,薄膜壓力傳感器將施加在傳感器感應區域的壓力轉換成電阻信號,然后根據力-電阻的標定關系曲線獲得外界所施壓力的變化信息,壓力越大,傳感器輸出的電阻越小。
在行走過程中,腳底支反力主要分布在前腳掌、后腳掌與足弓處,因此,分別在鞋底的前腳掌、足弓處和后腳掌處放置4個該傳感器,分別標號為1號、2號、3號、4號。布置如圖2所示。
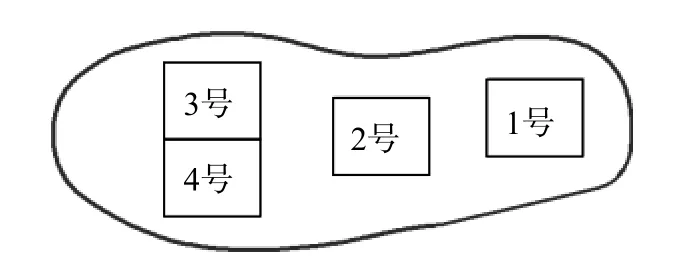
圖2 傳感器位置
2.1.2 ZigBee無線發送/接收模塊
本系統無線發射模塊嵌入了協處理器STM32-F103CBT6單片機,ZigBee無線節點為ESP8266無線模塊。協處理器寄存了下位機7路傳感器數據,包括軀干傾角、大腿傾角、小腿傾角和腳底支反力。每路都是16位二進制數據,采樣頻率為50 Hz。
接收模塊包括ESP8266無線模塊和串口通信模塊,主要功能是接收傳感模塊數據,并將數據發送至PC端。無線發送與接收頻率為2 412 MHz,串口波特率為115 200,數據位8位,無奇偶校驗位,停止位為1。
2.2 步態周期歸一化
軟件模塊采用基于美國國家儀器有限公司(National Instruments)的CVI軟件。如圖3為步態周期歸一化流程,人體步態有一定周期性,首先通過自相關函數得到各個步態周期,然后通過腳底支反力特征找到周期起點分割各個步態周期,最后利用三次樣條插值將所有周期歸整為同一周期,完成周期歸一化。

圖3 步態周期歸一化流程
2.2.1 自相關函數求步態周期
為了確定該信號的周期,工程上通常采用自相關函數。求取f(t)和將f(t)在時間軸上錯開時間τ的函數的相關性,觀察在錯開的時間τ處相關值是否出現峰值,來確定周期。
模擬信號f(t)的自相關函數表達式為

在本試驗中,步態信號是離散字信號,其相關函數表達式為
穿戴者在行走過程的步態是周期性運動,髖關節傾角、膝關節傾角和腳底支反力具有明顯周期性。足底支反力使用式(2),進行自相關處理,得到自相關曲線,每個峰值間即為步態周期。在穿戴者行走過程中,每一步態存在一定差異,導致步態周期不同,因此,需要得到每步的周期。通過極大值點法確定各個步態周期Ni,計算Rff(j)差分,得到Ni便于進行周期分割。
2.2.2 確定周期起點
正常行走步態過程中,一個腳底觸地到這只腳再次觸地為一個步態循環。在一個步態周期過程中,左腳地面支反力呈雙峰曲線如圖4所示。
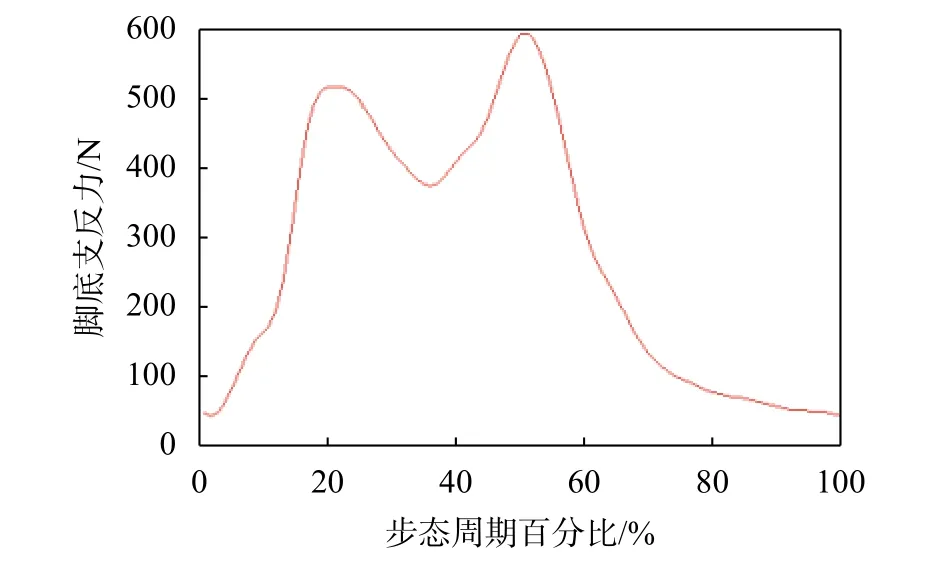
圖4 足底支反力曲線
本系統依據左腳底支反力情況來劃分周期,即確定腳底支反力信號的第一個上升沿。上升沿起點為雙峰曲線的第一個極小值點,利用公式(3)和公式(4)計算某相鄰數據的差分 diff(i–1)、diff(i):

當 diff(i–1)<0 且 diff(i)>0 時,可以確定i點為該周期極點;
定義特征值變量I,用于保存某一周期Ni處于上升沿數據的個數;
在同一步態周期中,判斷極點i之后的數據是否處于第1個上升沿,若是,則在特征變量I的基礎上加 1,即

第1個上升沿約為支撐相的50%,支撐相約為整個周期的60%,所以第1個上升沿約為步態周期的30%,第2個上升沿約為周期的15%。在該周期內,為了區別第 2個上升沿,設定變量α,如果I>αNi,即可確定極點i為該周期起點。另外針對不同的穿戴者,通過調整α的值,可以提高識別準確性。
2.2.3 三次樣條插值
根據2.2.2節所得到的步態起點對髖關節、膝關節傾角與腳底支反力進行周期分割,得到n個不同周期的步態數據,每個周期為Ni,為方便數據處理,需要將n個周期數據整合為相同周期T(Ni<T)。
三次樣條插值具有連續的二階導數,并且曲線的光滑性好,存在唯一解,工程上通常使用三次樣條作為差值函數s(x)。為獲得準確的插值數據,采用公式(6)進行相鄰兩節點間[xj–1,xj]的分段插值。

采樣數據截取前后閾值,步態周期的邊界點x0與xn存在一階導數,因此,步態周期滿足三次樣條插值的第二類邊界條件,利用邊界條件

建立動態鏈接庫,構造三彎矩陣方程,由第二類邊界條件得到:
求得Mi即可得到各段三次樣條函數的系數aj、bj、cj、dj。
根據歸一化周期T,確定插值點間隔為Ni/T。
穿戴者在行走過程中,不同周期內同一時刻的運動狀態有一定的偏差,為了便于觀察某一時刻運動狀態,需要得到歸一化后周期T內的每一時刻t的信號范圍,即求所有周期T內同一時刻t的數據最值與平均值。
3 試驗驗證
3.1 監測系統試驗
為檢驗本系統的可行性,本試驗系統與步態分析儀同時綁縛在穿戴者身上,進行對比試驗。
將本系統的傳感模塊分別綁縛在穿戴者的軀干、大腿、小腿上,并穿上傳感靴。同時在相應部位放置步態分析儀的光學元件,右側為步態分析儀的顯示界面。步態分析儀通過識別綁縛在腿上的光學元件位置來確定步態,故而每次試驗只能監測一條腿運動狀態。試驗監測時間設定為30 s,步行速度為3 m/s。
3.2 CVI試驗數據顯示
通過CVI讀取試驗數據,髖關節傾角運動范圍為 0°~40°,膝關節傾角運動范圍在–10°~60°,并且,左腿與右腿具有明顯的相位差。左腳支反力范圍為250 ~600 N,支撐相與擺動相差異明顯。將關節傾角和左腳支反力進行歸一化處理,得到歸一化曲線,如圖5所示。其中,上部虛線為歸一化后不同周期在該點處的最大值,同理,中部實線為平均值,下部點線為最小值。
提取歸一化曲線,可以看出,左腿與右腿之間相位差為180°。髖關節傾角角度變化明顯;膝關節傾角具有明顯雙峰,容易區分單腿擺動相與支撐相;足底支反力峰值較為突出,足壓雙峰相對明顯。
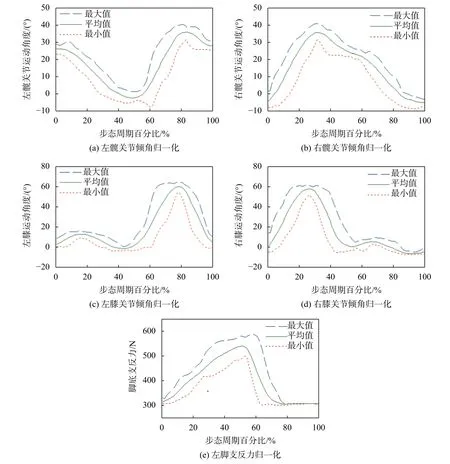
圖5 歸一化結果
3.3 歸一化對比分析
穿戴者分別在3 m/s、4 m/s、5 m/s步速下進行歸一化對比試驗,圖6分別為步態分析儀與本試驗系統膝關節運動傾角歸一化數據對比曲線。從該圖中可知,兩監測系統監測結果運動趨勢基本一致,可以明顯區分支撐相與擺動相。
4 結束語
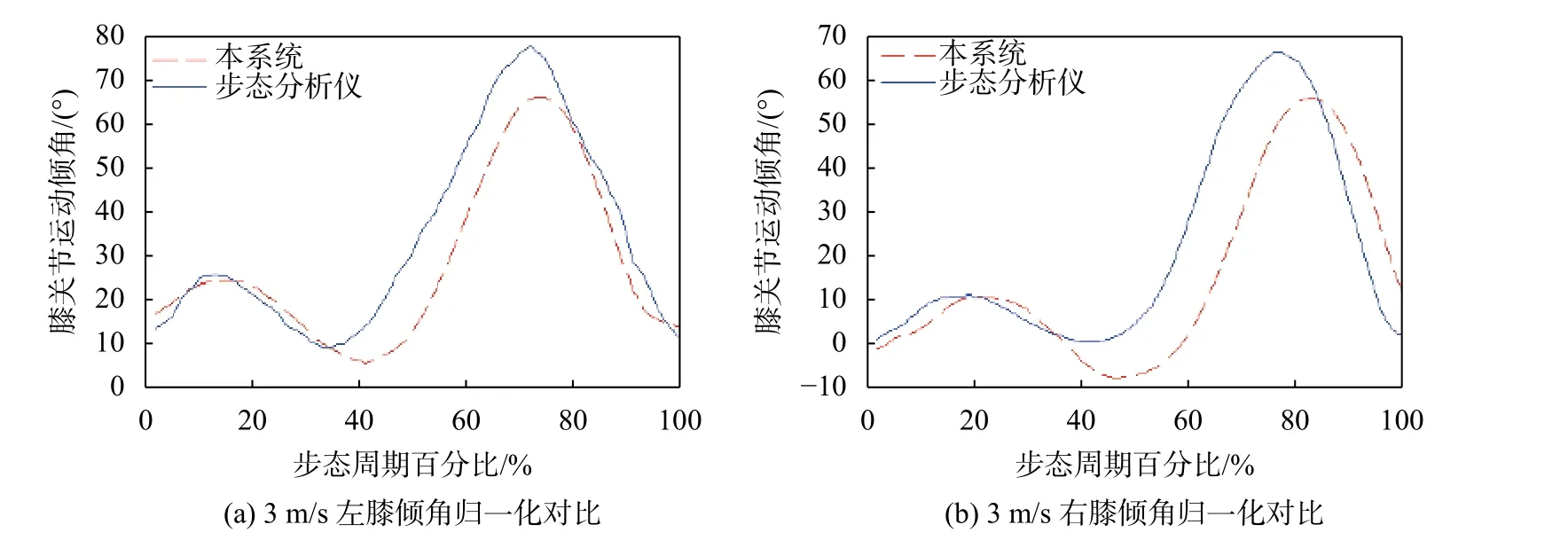
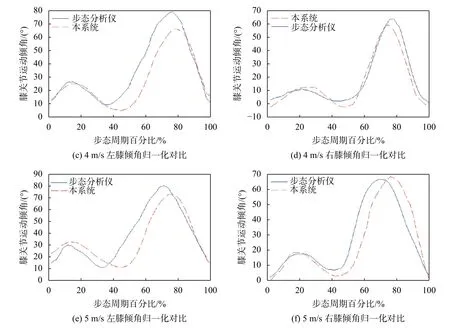
圖6 歸一化數據對比
本文針對步態監測問題,設計了一套基于MEMS傳感器和薄膜壓力傳感器的步態監測系統。實現對人體步態信息的無線傳感監測,并且測量方便。完成對步態周期的歸一化處理。通過對比實驗表明,該測試裝置可以實現人體步態監測。在助力外骨骼研究中,該裝置可以為外骨骼步態劃分與識別的研究提供有效的監測。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
