基于單目AR環(huán)境下的目標(biāo)識(shí)別與跟蹤算法
2018-10-15 05:58:42郭陽(yáng)陽(yáng)
計(jì)算機(jī)技術(shù)與發(fā)展 2018年10期
關(guān)鍵詞:特征
郭陽(yáng)陽(yáng),孫 涵
(南京航空航天大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院,江蘇 南京 211106)
0 引 言
增強(qiáng)現(xiàn)實(shí)技術(shù)(augmented reality,AR)是一種把原本在現(xiàn)實(shí)世界的一定時(shí)間空間范圍內(nèi)很難體驗(yàn)到的實(shí)體信息(如視覺(jué)信息、聲音、味道、觸覺(jué)等),通過(guò)科學(xué)技術(shù)模擬仿真后再疊加到現(xiàn)實(shí)世界被人類(lèi)感官所感知,從而達(dá)到超越現(xiàn)實(shí)的感官體驗(yàn)的技術(shù)。這種技術(shù)的目標(biāo)是在屏幕上把虛擬世界套在現(xiàn)實(shí)世界并進(jìn)行互動(dòng)。
增強(qiáng)現(xiàn)實(shí)技術(shù)的應(yīng)用可以給人們的生活帶來(lái)很多便利,比如在城市規(guī)劃以及房產(chǎn)開(kāi)發(fā)中,開(kāi)發(fā)者可以使用增強(qiáng)顯示技術(shù)模擬城市開(kāi)發(fā)以及房屋建造的過(guò)程,有利于設(shè)計(jì)與管理人員對(duì)各種規(guī)劃方案進(jìn)行輔助設(shè)計(jì)與方案評(píng)審,規(guī)避設(shè)計(jì)風(fēng)險(xiǎn)。同樣,增強(qiáng)現(xiàn)實(shí)技術(shù)也可以給人們的生活帶來(lái)很多樂(lè)趣,如Pokemon Go就是一款利用增強(qiáng)現(xiàn)實(shí)技術(shù)設(shè)計(jì)而成的游戲。
三維配準(zhǔn)[1-3]是增強(qiáng)現(xiàn)實(shí)技術(shù)中的最核心技術(shù)。在增強(qiáng)現(xiàn)實(shí)技術(shù)中配準(zhǔn)的目的是對(duì)影像數(shù)據(jù)進(jìn)行幾何上的精確理解。這樣,要疊加的數(shù)據(jù)的定位問(wèn)題就成了增強(qiáng)現(xiàn)實(shí)技術(shù)中最關(guān)鍵的問(wèn)題。其中,數(shù)據(jù)的定位可以用旋轉(zhuǎn)平移矩陣來(lái)表示,而求取旋轉(zhuǎn)平移矩陣就是文中要研究的主要內(nèi)容。
流程如圖1所示。
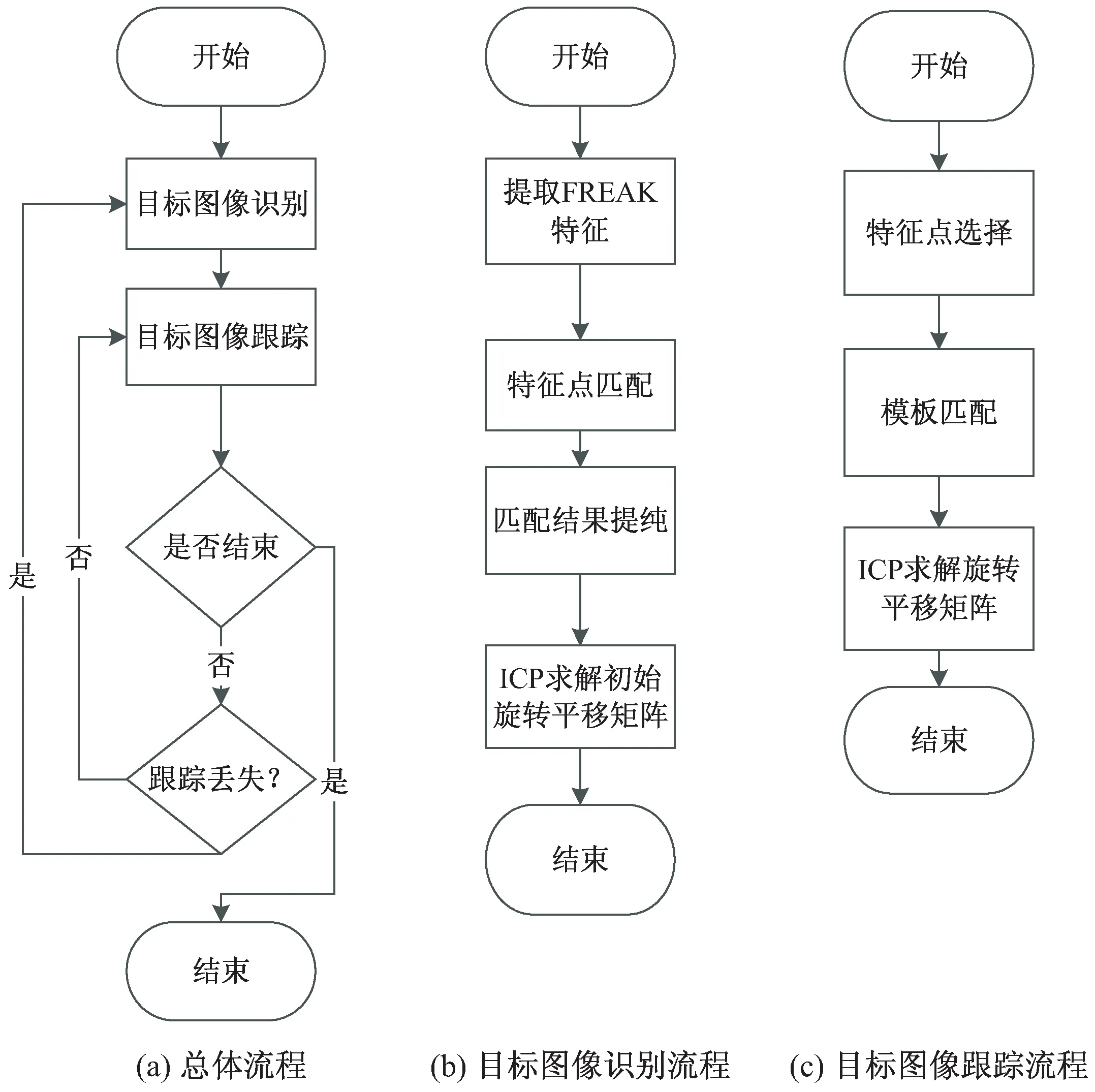
圖1 流程圖
1 相關(guān)工作
1.1 李群與李代數(shù)
AR是一種基于3D模型的技術(shù),文中采用的圖片位置的表示方法為旋轉(zhuǎn)矩陣和平移矩陣,因此主要介紹三維歐氏群SE(3)以及對(duì)應(yīng)的李代數(shù)se(3)。
SO(3),t∈R3}
(1)
其中,R為旋轉(zhuǎn)矩陣;t為平移矩陣;SO(3)為三維旋轉(zhuǎn)群。
R滿足屬性RRT=I,I為單位矩陣。將R看作一個(gè)隨時(shí)間變化的函數(shù),即R(t),有R(t)R(t)T=I,對(duì)等式兩邊求導(dǎo)得:
R(t)'R(t)T+R(t)TR(t)'=0
(2)
于是:
R(t)'R(t)T=-(R(t)'R(t)T)T
(3)
可以看出,R(t)'R(t)T是一個(gè)反對(duì)稱(chēng)矩陣。對(duì)任意一個(gè)3×3反對(duì)稱(chēng)矩陣A,存在一個(gè)向量a=[a1,a2,a3]T,滿足Ab=a×b,其中b為任意三維向量,所以有:
(4)
由此可得:
(5)
將SO(3)的結(jié)論推廣到SE(3),由于SE(3)多了平移的三個(gè)自由度,因此,使用p=[p1,p2,p3]來(lái)表示平移。
由此可以得到:
(6)
根據(jù)矩陣的指數(shù)映射,使用θ和α表示向量a的模長(zhǎng)和方向,可以得到:
exp(θα)=cosθI+(1-cosθ)aaT+
sinθA
(7)
(8)
最終得到:
(9)
1.2 迭代最近鄰點(diǎn)(iterative closest points,ICP)算法
在單目AR的圖像跟蹤中,每一幀都需要計(jì)算相對(duì)于模板圖片的旋轉(zhuǎn)平移矩陣。假設(shè)已知模板圖片以及當(dāng)前幀兩組匹配的特征點(diǎn),就可以利用1.1節(jié)中的相關(guān)知識(shí)求出旋轉(zhuǎn)平移矩陣。
視頻的每一幀隨時(shí)間變化而變化,因此,可以將視頻看作一個(gè)隨時(shí)間變化的函數(shù),這就滿足了李群與李代數(shù)的基本條件。下面構(gòu)造矩陣T。由于每次運(yùn)算是以前一幀的矩陣為初始矩陣,所以矩陣初始化在模板圖像識(shí)別過(guò)程實(shí)現(xiàn),實(shí)驗(yàn)中,將R矩陣初始化為單位矩陣,t矩陣元素全為0,經(jīng)過(guò)多次迭代得到最終矩陣。
假設(shè)a為模板圖像特征點(diǎn)坐標(biāo),b1為當(dāng)前幀特征點(diǎn)坐標(biāo),b2為上一幀特征點(diǎn)坐標(biāo)(a、b1、b2都為齊次坐標(biāo)),對(duì)視頻函數(shù)求導(dǎo)得:
(10)
對(duì)式10變形得:
Gh=b1-b2
(11)
其中:
(12)
h=(a1,a2,a3,p1,p2,p3)T
(13)
由于h有6個(gè)參數(shù),G只有3行,3個(gè)方程不能求得6個(gè)未知數(shù),所以需要有多個(gè)點(diǎn)參與,最后求得h如下:
h=(GTG)-1GT(b1-b2)
(14)
求得h后,根據(jù)式7~9,即可求出最后的旋轉(zhuǎn)平移矩陣T。
2 目標(biāo)圖像識(shí)別
在目標(biāo)跟蹤問(wèn)題中,目標(biāo)識(shí)別是目標(biāo)跟蹤的前提。文中使用的模板目標(biāo)圖片如圖2所示。

圖2 模板圖片
識(shí)別過(guò)程如下所述。
2.1 提取圖像FREAK特征
常見(jiàn)的圖像特征描述子有SIFT[4]、SURF[5]、ORB以及HOG特征等,但是這些特征描述子有的提取速度慢,有的局限性大,而圖像識(shí)別與跟蹤對(duì)實(shí)時(shí)性要求很高,因此這些特征描述子都不能滿足要求。FREAK[6]特征也許精度不如SIFT以及SURF,但是其提取速度快,可以滿足實(shí)時(shí)性的要求;而對(duì)于FREAK特征精度的問(wèn)題,可以對(duì)FREAK特征進(jìn)行多次優(yōu)化,以保證最后得到的匹配點(diǎn)的正確性。
2.2 基于單應(yīng)性矩陣的特征點(diǎn)匹配結(jié)果提純
在提取出模板以及視頻當(dāng)前幀的FREAK特征后,可以得到兩組匹配的特征點(diǎn),為保證匹配特征點(diǎn)的精確度,要將其中一些匹配錯(cuò)誤的特征點(diǎn)去掉。具體過(guò)程如下:
(1)Hough投票[7-8]。每個(gè)特征點(diǎn)的信息中都包含坐標(biāo)、旋轉(zhuǎn)角度以及尺度的四維信息,利用這四維信息對(duì)每個(gè)特征點(diǎn)進(jìn)行投票,選擇得票最多的bin上的特征點(diǎn)。
(2)計(jì)算單應(yīng)性矩陣[9]。單應(yīng)性矩陣為一個(gè)3×3的矩陣,表示為:
(15)
矩陣H會(huì)將一幅圖像上的點(diǎn)的坐標(biāo)a=(x1,y1,1)映射到另一幅圖像上的點(diǎn)的坐標(biāo)b=(x2,y2,1)。因?yàn)閳D像坐標(biāo)的Z值都為1,所以由H和cH所得到的b的坐標(biāo)是一樣的,其中c為常數(shù)。因此,將h33固定為1,這樣H就還有8個(gè)自由度,根據(jù)每組點(diǎn)對(duì),可以得到2個(gè)方程,如下:
(16)
(17)
所以總共需要4組點(diǎn)對(duì)來(lái)求得H。式16、17經(jīng)過(guò)變換后,可以寫(xiě)成一個(gè)矩陣A與一個(gè)向量h相乘的形式,如下:

(18)
其中
h=(h11,h12,h13,h21,h22,h23,h31,h32,h33)T
(19)
因?yàn)橛?組點(diǎn)對(duì),每個(gè)點(diǎn)對(duì)可以寫(xiě)成2×9的矩陣,所以可以構(gòu)造出一個(gè)8×9的矩陣。矩陣構(gòu)造完成后,要對(duì)Ah=0進(jìn)行求解,然后對(duì)A進(jìn)行SVD分解,即:
A=U*Σ*VT
(20)
則V的最后一列即為所求的h,將h變形成3×3矩陣,即為H。
(3)選擇最優(yōu)單應(yīng)性矩陣。在步驟1中求得多組匹配的特征點(diǎn),而求解單應(yīng)性矩陣只需要四組匹配的特征點(diǎn),因此,可以多次求解單應(yīng)性矩陣,然后尋找其中的最優(yōu)解。
首先,要確定兩組點(diǎn)的對(duì)應(yīng)關(guān)系是否一致,例如:在模板圖像中的四個(gè)點(diǎn)可以按照順時(shí)針?lè)较蜻B接起來(lái),則視頻幀中對(duì)應(yīng)的點(diǎn)也要能夠按照順時(shí)針?lè)较蜻B接起來(lái),如果不能,就要重新選取四個(gè)點(diǎn);經(jīng)過(guò)多次上述步驟后,可以得到多個(gè)單應(yīng)性矩陣,然后將所有點(diǎn)對(duì)代入到每個(gè)單應(yīng)性矩陣中,計(jì)算每個(gè)單應(yīng)性矩陣的誤差和,選擇誤差最小的單應(yīng)性矩陣作為最優(yōu)解。
(4)判斷所求的單應(yīng)性矩陣是否滿足條件。將所有匹配的特征點(diǎn)對(duì)代入到單應(yīng)性矩陣中,設(shè)定一個(gè)誤差閾值,計(jì)算點(diǎn)對(duì)中誤差小于閾值的數(shù)量,如果數(shù)量大于一定值,則將這些特征點(diǎn)對(duì)記錄下來(lái),作為提純后的特征點(diǎn)來(lái)計(jì)算旋轉(zhuǎn)平移矩陣。
2.3 求解初始旋轉(zhuǎn)平移矩陣
經(jīng)過(guò)特征點(diǎn)的匹配及一系列優(yōu)化過(guò)程,得到了模板圖片與視頻中圖片的兩組匹配的特征點(diǎn)對(duì),利用ICP[10]算法可以求得初始的旋轉(zhuǎn)平移矩陣。
3 目標(biāo)圖像跟蹤
在第二節(jié)得到了模板圖像所在的第一幀圖像,以及初始的旋轉(zhuǎn)平移矩陣,本節(jié)將要就模板圖片的跟蹤以及求解每一幀的旋轉(zhuǎn)平移矩陣展開(kāi)討論。
模板圖片跟蹤的實(shí)時(shí)性要求比識(shí)別高,所以就不能使用提取特征點(diǎn)再匹配這樣耗時(shí)比較高的方法,然而在跟蹤過(guò)程中,視頻前后兩幀模板目標(biāo)圖片所在的位置并不會(huì)發(fā)生太大的變化,因此,可以使用模板匹配的方法,在上一幀特征點(diǎn)坐標(biāo)的周?chē)业疆?dāng)前幀特征點(diǎn)的坐標(biāo);由1.1節(jié)介紹的李群與李代數(shù)內(nèi)容,可以使用六個(gè)自由度的矩陣的導(dǎo)數(shù)來(lái)求出旋轉(zhuǎn)平移矩陣,而視頻流可以看作一個(gè)隨時(shí)間變化的連續(xù)函數(shù),連續(xù)兩幀的坐標(biāo)差可以看作是函數(shù)的導(dǎo)數(shù)。有了上面這些理論后,就可以利用上一幀求得的特征點(diǎn)坐標(biāo)以及旋轉(zhuǎn)平移矩陣來(lái)求得當(dāng)前幀的特征點(diǎn)以及旋轉(zhuǎn)平移矩陣。算法的具體過(guò)程如下所述。
3.1 目標(biāo)圖像特征點(diǎn)選擇
為了讓特征點(diǎn)盡量分散以及保證特征點(diǎn)的穩(wěn)定性,選擇以下類(lèi)型的特征點(diǎn),如圖3所示(其中圓形特征點(diǎn)為(1)~(4)所選擇的特征點(diǎn),菱形特征點(diǎn)為(5)選擇的特征點(diǎn))。

圖3 特征點(diǎn)選取
(1)選擇特征點(diǎn)中距離所有特征點(diǎn)的中心點(diǎn)最遠(yuǎn)的點(diǎn);
(2)選擇距離(1)中選擇的特征點(diǎn)最遠(yuǎn)的特征點(diǎn);
(3)選擇距離(1)和(2)選擇的特征點(diǎn)所連成的直線距離最遠(yuǎn)的特征點(diǎn);
(4)選擇與(1)、(2)和(3)選擇的特征點(diǎn)所圍成的四邊形面積最大的特征點(diǎn);
(5)選擇圖像上一幀所使用的特征點(diǎn)。
3.2 特征點(diǎn)模板匹配
在上一幀中,已經(jīng)得到了所需要的特征點(diǎn)位置,那么在當(dāng)前幀中得到對(duì)應(yīng)的特征點(diǎn)的位置就成了關(guān)鍵性的問(wèn)題。由于前后兩幀特征點(diǎn)的位置變動(dòng)不會(huì)很大,因此,文中使用模板匹配[11-12]的方法,在上一幀特征點(diǎn)的周?chē)ヅ洚?dāng)前幀的特征點(diǎn)。具體過(guò)程如下:
(1)選定特征點(diǎn)模板:在模板圖片中,以特征點(diǎn)位置為中心,截取一個(gè)12×12(見(jiàn)圖3)的patch,以這個(gè)patch作為當(dāng)前特征點(diǎn)模板。
(2)劃定當(dāng)前幀特征點(diǎn)位置范圍:由于前后兩幀特征點(diǎn)位置不會(huì)變化很大,因此,以上一幀特征點(diǎn)位置為中心,在當(dāng)前幀中截取一個(gè)36×36的patch,作為當(dāng)前幀特征點(diǎn)的范圍。
(3)確定特征點(diǎn)位置大概范圍[13]:特征點(diǎn)的位置在36×36的小patch中,但是如果對(duì)36×36的每一個(gè)點(diǎn)都進(jìn)行模板匹配,這樣效率無(wú)疑會(huì)很低,因此,可以選取一個(gè)特定步長(zhǎng),先大致確定特征點(diǎn)的范圍,以提升效率。在36×36的范圍內(nèi),以3為步長(zhǎng),比較以當(dāng)前點(diǎn)為中心截取的12×12的patch與模板patch的差異,選出兩個(gè)差異最小的點(diǎn)。選取兩個(gè)差異最小的點(diǎn),是為了保證得到的結(jié)果是全局最小,而不是局部最小。
(4)確定特征點(diǎn)位置:在步驟3中,得到了兩個(gè)5×5的特征點(diǎn)范圍,對(duì)這兩個(gè)5×5的patch中的每一個(gè)點(diǎn)與模板patch進(jìn)行模板匹配,選取差異最小的一個(gè)點(diǎn)作為特征點(diǎn)位置。
由于確定每個(gè)特征點(diǎn)位置的過(guò)程是獨(dú)立的,因此可以使用多線程來(lái)進(jìn)行加速,進(jìn)一步提高算法運(yùn)行速度。
3.3 當(dāng)前幀旋轉(zhuǎn)平移矩陣計(jì)算
在3.2節(jié)中,計(jì)算出了與模板圖片特征點(diǎn)對(duì)應(yīng)的當(dāng)前幀中特征點(diǎn)的位置,這樣就得到了兩組匹配的特征點(diǎn)[14],可以使用1.2節(jié)中的ICP算法進(jìn)行求解。在ICP算法中,以上一幀旋轉(zhuǎn)平移矩陣為初始矩陣,兩幀之間特征點(diǎn)位置的差作為導(dǎo)數(shù),ICP算法的條件得以滿足,可以求得當(dāng)前幀的旋轉(zhuǎn)平移矩陣。然后將當(dāng)前幀作為上一幀,迭代求出每一幀的旋轉(zhuǎn)平移矩陣。
4 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)運(yùn)行環(huán)境為Windows10,處理器頻率為3.60 GHz,鏡頭分辨率設(shè)為480×360。實(shí)驗(yàn)中圖片識(shí)別和圖片跟蹤在兩個(gè)線程下進(jìn)行,其中,圖片識(shí)別的過(guò)程在60 ms左右,圖片跟蹤如果在單線程下運(yùn)行,每一幀的跟蹤時(shí)間大概為20 ms左右,如果模板匹配過(guò)程在多線程下運(yùn)行,跟蹤速度明顯加快。實(shí)驗(yàn)效果如圖4所示。
首先對(duì)目標(biāo)圖片識(shí)別過(guò)程進(jìn)行時(shí)間復(fù)雜度分析。在特征點(diǎn)匹配過(guò)程中使用了暴力匹配的方法,則匹配過(guò)程時(shí)間復(fù)雜度為O(n2);求解單應(yīng)性矩陣每4個(gè)特征點(diǎn)為一組,求解出n個(gè)單應(yīng)性矩陣,則時(shí)間復(fù)雜度為O(kn);求解出單應(yīng)性矩陣后,每個(gè)特征點(diǎn)都與多個(gè)單應(yīng)性矩陣計(jì)算誤差,則時(shí)間復(fù)雜度為O(kn);ICP算法過(guò)程中,選出的n特征點(diǎn)迭代地更新矩陣,直至收斂,則時(shí)間復(fù)雜度為O(kn)。

圖4 圖片識(shí)別與跟蹤效果圖
目標(biāo)圖片跟蹤過(guò)程的時(shí)間復(fù)雜度為:特征點(diǎn)選擇過(guò)程時(shí)間復(fù)雜度為O(n);特征點(diǎn)模板匹配過(guò)程中,n個(gè)特征點(diǎn)中的每個(gè)點(diǎn)都要與patch中的k個(gè)點(diǎn)進(jìn)行模板匹配,則時(shí)間復(fù)雜度為O(kn)。
5 結(jié)束語(yǔ)
文中提出了一種基于單目AR[15]的圖像檢測(cè)及跟蹤算法。該算法首先對(duì)模板圖像提取FREAK特征,然后在視頻的每一幀中提取FREAK特征與模板圖像特征進(jìn)行比較,通過(guò)Hough投票、計(jì)算單應(yīng)性矩陣等過(guò)程優(yōu)化特征點(diǎn)的匹配結(jié)果,利用ICP算法求得圖像的初始旋轉(zhuǎn)平移矩陣,完成檢測(cè)過(guò)程;對(duì)于圖像的跟蹤過(guò)程,利用視頻上一幀中使用的特征點(diǎn),通過(guò)模板匹配求得本幀中對(duì)應(yīng)特征點(diǎn)的位置,然后利用ICP算法迭代求出視頻每一幀的旋轉(zhuǎn)平移矩陣。實(shí)驗(yàn)結(jié)果表明,該算法能夠快速對(duì)目標(biāo)圖片進(jìn)行識(shí)別并且能夠?qū)崟r(shí)跟蹤目標(biāo)圖片的位置,對(duì)于AR中目標(biāo)圖片的識(shí)別與跟蹤具有重要意義。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38