基于ZGCAD的封閉行星齒輪傳動計算
2018-10-13 02:09:40袁士明
機械工程師 2018年10期
袁士明
(杭州臨江前進齒輪箱有限公司技術部,杭州 311228)
0 引言
封閉行星齒輪傳動具有結構緊湊、承載能力和傳動比范圍大等諸多優點,但該類傳動形式結構復雜,國內尚未開發出一款具備此類齒輪傳動形式計算功能的專業軟件。鄭州機械研究所開發的齒輪傳動CAD集成系統(文中簡稱ZGCAD)是一款在國內已得到廣泛推廣應用的專業齒輪計算軟件。本文以某進口風電增速箱行星齒輪傳動部分結構為例,利用轉化機構法[1]推導此類典型封閉行星齒輪傳動的關鍵參數計算公式,并將計算結果依據嚙合功率法[2]的基本原理換算成能夠滿足ZGCAD軟件內置NGW行星齒輪計算模塊的輸入條件,實現封閉行星齒輪的強度計算。
文中用主字母i代表傳動比,T代表轉矩,n代表轉速,P代表傳動功率,A代表機構,Z代表齒數;主字母后如有上角標,代表固定構件;下角標前后分別代表輸入和輸出構件,示例如下:表示構件H固定條件下,構件a輸入,b輸出時的傳動比;表示構件b固定條件下,構件a的傳遞功率。
1 結構簡介
如圖1所示:封閉差動行星齒輪傳動是由一個雙自由度差動行星齒輪傳動和一個行星架固定的準行星齒輪傳動串聯而成的單自由度組合行星齒輪傳動。
創建機構的功率流簡圖,如圖2所示:機構輸入功率P入(T入·n入),分別通過一級齒圈b1和二級行星架H2將功率分流至準行星機構與差動行星機構A(H2b2)a2,其中準行星機構又將所傳遞的功率通過二級齒圈b2匯入差動行星機構,并通過太陽輪a2將合流功率輸出。為便于分析,將圖1所示的封閉差動行星機構拆解為圖3、圖4[4]兩個獨立簡化機構。
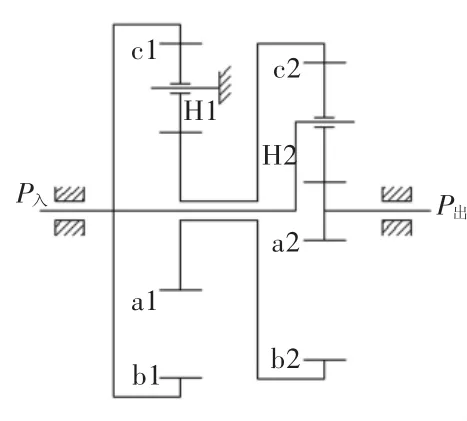
圖1 結構簡圖
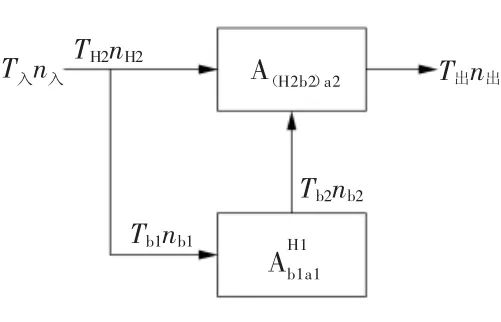
圖2 機構功率流簡圖
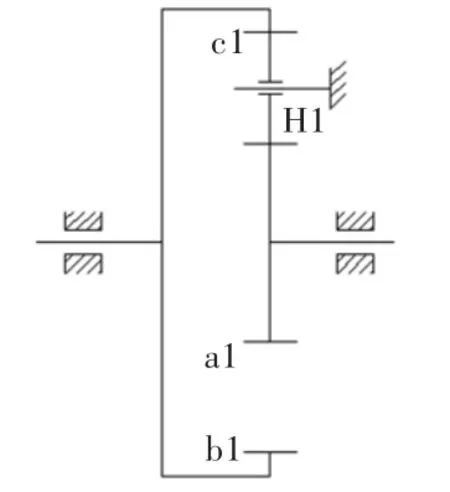
圖3 準行星機構

圖4 差動行星機構
2 關鍵參數計算公式推導
2.1 傳動比
2.1.1 準行星機構傳動比
對于圖3所示的準行星機構,因為行星架H1固定,所以其傳動本質為一個內嚙合和一個外嚙合的定軸傳動。則準行星機構的傳動比為

2.1.2 差動行星機構傳動比
對于圖4所示的差動行星機構,通過轉化機構法,首先推導各基本構件的轉速關系式:
行星架固定的轉化機構傳動比為
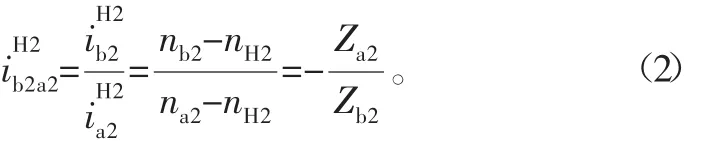
則差動行星機構傳動比


2.1.3 封閉行星機構傳動比



2.2 基本構件[2]轉矩計算公式推導(理論計算不計功率損失)
對于封閉系統功率平衡:T入·n入+Ta2·na2=0;則差動行星機構太陽輪轉矩為

對于封閉機構轉矩約束條件:

對于差動行星機構外轉矩平衡:TH2+Tb2+Ta2=0;對于差動行星機構功率平衡:;則差動行星機構內齒圈轉矩;應用行星齒輪傳動普遍關系式:=1-,將T表達式簡化得:b2
則差動行星機構行星架轉矩為

對于準行星機構功率平衡:Tb1·nb1+Ta1·na1=0;則準行星機構內齒圈轉矩為

對于準行星機構外轉矩平衡:Tb1+TH1+Ta1=0;則準行星機構行星架轉矩為

2.3 封閉行星傳動功率推導
差動行星機構行星架分流功率[5]:

準行星機構內齒圈分流功率:

準行星機構太陽輪傳遞功率:

差動行星機構太陽輪傳遞功率:

2.4 輸入ZGCAD軟件的轉化機構參數推導
由于ZGCAD軟件內置行星齒輪計算程序只能對內齒圈固定的NGW結構進行強度計算,因此為了能運用該軟件對此封閉行星齒輪傳動進行強度計算,本文利用嚙合功率法中關于行星機構在轉化機構中,各構件間的相對轉速、齒廓間的嚙合作用力和摩擦因數都完全相同的論述,將圖3、圖4兩個原始簡化機構進行機構轉化以滿足軟件的應用條件。
2.4.1 準行星機構參數公式
轉化機構小輪(太陽輪)轉矩:

轉化機構該級行星傳動減速比:

轉化機構太陽輪轉速:

轉化機構太陽輪傳遞功率:

2.4.2 差動行星機構參數公式
轉化機構小輪(太陽輪)轉矩:

轉化機構該級行星傳動減速比:

轉化機構太陽輪轉速:

轉化機構太陽輪傳遞功率:

3 實例計算
3.1 銘牌參數
計算所需的該增速箱銘牌參數如下:額定傳遞功率P入=3000 kW;額定輸入轉速n入=15.7 r/min。
3.2 齒輪參數
計算所需的該增速箱封閉行星傳動齒輪部分測繪參數如表1所示。

表1 差動機構齒輪測繪參數
3.3 軟件輸入參數計算
將銘牌和齒輪參數代入轉化機構計算公式后得到ZGCAD軟件進行強度計算所需的等效輸入參數值如表2所示。
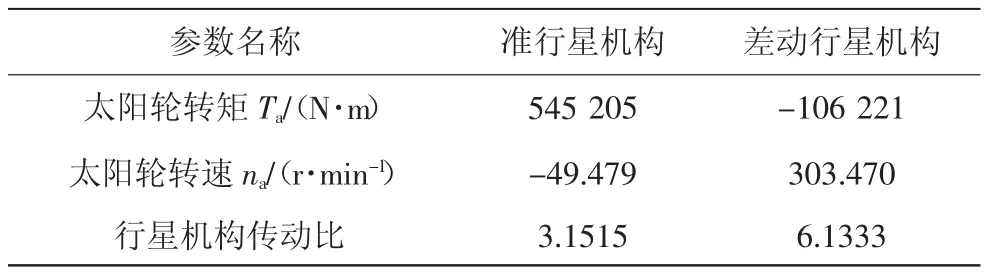
表2 ZGCAD軟件輸入參數
3.4 準行星機構強度計算
將經機構轉化后準行星機構強度計算所需輸入參數依次填入軟件輸入欄框,如圖5~圖10所示。
在強度計算過程中,涉及到刀具、材料特性等輸入選項,本例計算中選擇軟件默認輸入,
其余選項依據實物測量數據及相關計算標準輸入。
3.5 差動行星機構強度計算
差動行星機構強度計算輸入選項與準行星計算輸入完全一致,參見圖5~圖10依次將參數填入欄框,這里不再贅述。
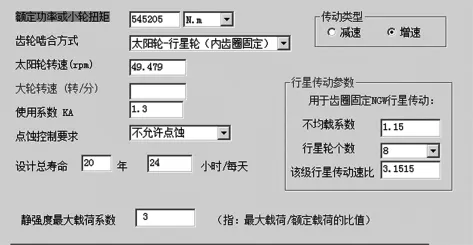
圖5 外嚙合強度計算第1頁
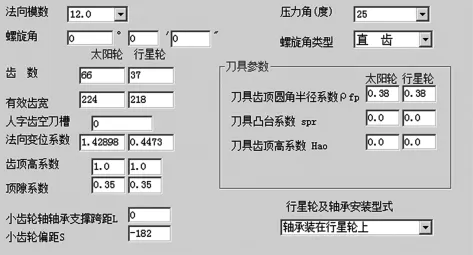
圖6 外嚙合強度計算第2頁

圖7 外嚙合強度計算第3頁
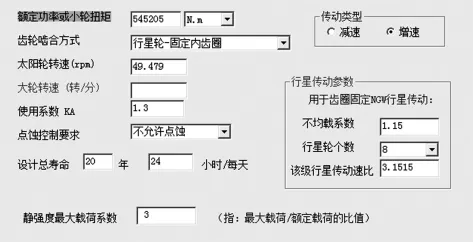
圖8 內嚙合強度計算第1頁
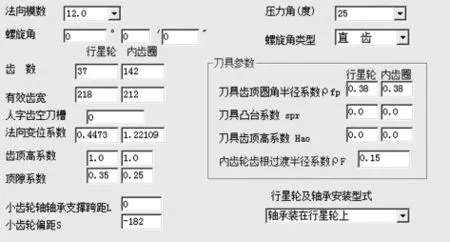
圖9 內嚙合強度計算第2頁
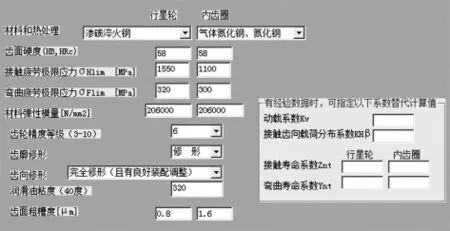
圖10 內嚙合強度計算第3頁
3.6 強度計算結果
本例中通過ZGCAD軟件計算所得的強度計算結果如表3所示。
3.7 國外軟件計算報告
為了驗證上述強度轉換計算的正確性,在同等條件下,依據功率分流原則(式(15)、式(16)),分別對封閉行星傳動的準行星級和差動級運用具備功能全面的的國外權威齒輪計算軟件Kisssoft進行直接計算,所得結果如表4所示。

表3 封閉行星機構齒輪強度計算結果
3.8 結果討論
兩種軟件在相同計算參數條件下,各級齒輪受力計算結果(文中未列出)完全一致,且通過表3、表4各級齒輪強度計算值的對比可見,ZGCAD計算強度雖總體略高于Kisssoft計算結果,但兩者差異較小,完全可被接受。經分析導致計算結果差異的主要原因在于兩種軟件內置計算程序在引用標準上存在區別,并非計算方法有誤。
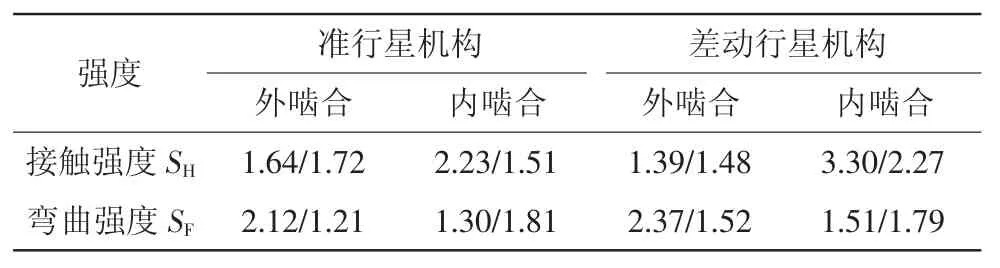
表4 Kisssoft強度計算報告
實踐證明,運用嚙合功率法對行星齒輪傳動進行機構轉化計算在原理上完全正確。通過此方法借助ZGCAD軟件進行封閉行星齒輪傳動設計計算完全可行,且能夠得到較準確的強度計算結果。
4 結語
本文應用嚙合功率法的基本原則,通過機構轉化法將原輸入參數轉化為ZGCAD軟件內置NGW計算模塊認可的輸入條件,實現了用國產軟件進行封閉行星齒輪強度的校核計算的實踐探索,大大提升了齒輪強度計算的效率和準確性。從前述理論分析可知此方法亦可推廣到其他各類復雜形式的齒輪傳動計算過程中,具有廣泛的應用價值。
本文通過對封閉行星傳動機構傳動比、分流功率表達式的推導,也為相關文獻針對類似傳動結構進行其他形式的等效分析方法提供了理論依據。
本文在前面分別推導了封閉機構太陽輪功率Pa1、Pa2與轉化機構太陽輪嚙合功率、的表達式,意在通過對比直觀地說明利用嚙合功率法所傳遞的嚙合功率與實際傳遞功率不相同,切不可混淆概念造成計算錯誤。
