GPS輔助無人機航空攝影在大比例尺測圖中的應用
2018-10-13 02:45:26楊智博
科技與創新 2018年19期
楊智博
?
GPS輔助無人機航空攝影在大比例尺測圖中的應用
楊智博
(新疆兵團勘測設計院(集團)有限責任公司,新疆 烏魯木齊 830002)
結合實際介紹了無人機航攝系統的發展的相關理論、技術方法等,論證了利用無人機航測技術能夠滿足1∶1 000地形圖的精度要求,闡述了其生產流程,探討了像片控制點密度和GPS輔助數據對成圖精度的影響。
GPS輔助;無人機;航空攝影;大比例尺地形圖
1 無人機大比例尺測圖關鍵技術
GPS輔助空中三角測量是利用裝在飛機上的GPS信號接收機連續的觀測GPS衛星信號,通過GPS載波相位測量差分定位技術的離線數據后處理獲取航攝儀曝光時刻設站的三維坐標,然后將其視為附加觀測值引入攝影測量區域網平差中,經采用統一的數學模型和算法以整體確定點位并對其質量進行評定的理論、技術和方法。
2 GPS無人機系統
本次試驗所用的SKY-27型無人機系統的整體組成:無人機航攝平臺、航攝儀、飛控系統、差分GPS、地面站系統。全系統需操作人員4名:機長、駕駛員、任務設備操作員(導航員)、飛行助手,也可視情況適量增減人員。
3 GPS輔助的無人機航攝數據獲取
3.1 測區概況
處于北緯43°59′25″~44°39′00″,東經87°17′42″~87°43′15″。城區南距烏魯木齊市33 km,西距昌吉23 km,東距阜康55 km。地貌形態南高北低,由南向北傾斜坡降0.5‰~2.5‰,海拔420~530 m。
3.2 航線設計
根據作業任務和低空數字航空攝影規范要求,利用地面監控站軟件對待航攝測區進行航攝技術參數設計。其中測圖比例尺為1∶1 000,攝區設計GSD為0.09 m,相對航高為337 m,航向重疊度為80%,旁向重疊度為60%.
3.3 飛行作業
3.3.1 任務準備階段
選擇起降場地,確定特情處理方案,做好無人機系統的檢測和調試工作,事先制訂航攝方案設計航線。
3.3.2 執行任務階段
完成無人機的組裝和檢查工作,系統檢測調試,任務航線發送至飛控,檢測完全正常后,發動起飛。地面站實時顯示無人機的飛行航跡、飛行參數。數碼相機根據航線的設置自動拍照。
3.3.3 返航回收階段
任務完成后,無人機自動返航到降落場地上空盤旋下降,到達一定高度后在合適位置遙控無人機傘降著陸。著陸后,導航員轉存照片和下載POS數據。地勤人員立即進行航后檢查、檢測、擦拭,并拆卸后裝入專用包裝箱內。
3.4 數據檢查
3.4.1 飛行質量檢查
本次成果質量檢查,檢查結果如下:旁向重疊度61%;航向重疊度80%;傾角(占測區像片數的百分比)優于5°的占90%;旋偏角(占測區像片數的百分比)優于15°的占99.7%.
3.4.2 影像質量檢查
先檢查POS數與照片數是否一致,抽查轉彎處POS是否和照片匹配,再對單片原始影像進行檢查。檢查要求如下:①影像應清晰,層次豐富,反差適中,色調柔和;②影像上不應有云、云影、煙、大面積反光、污點等缺陷;③確保因飛機地速的影響,在曝光瞬間造成的像點位移動一般不應大于1個像素,最大不應大于1.5個像素;④成果影像不能曝光過度,不能過黑,不能發虛。經檢查此次航飛原始影像滿足上述要求,可轉入下一環節。
3.5 像片控制點布設與測量
3.5.1 像控點的布設
本次試驗像片控制點布設方案是按1 km等間距布設,由于測區邊界不規則,在凹凸處也加設像控點。
3.5.2 像控點的判刺和整飾及測量
野外控制點應該以判點為主,刺點為輔。平高控制點的實地判點精度為圖上0.1 mm。點位應選在高程變化較小,且清晰易判的地物目標。電子版整飾時,點位指示要明確,點位描述要準確,尤其是高程描述,備注好刺點者、檢查者姓名。
4 數據處理及精度分析
4.1 差分GPS數據的解算
具體算法為:①提取移動站數據;②GPS基準站文件轉換;③GPS移動站站文件轉換;④基準站位置計算;⑤載波相位差分處理;⑥輸入相機與GPS相對位置參數;⑦提取GPS數據。
4.2 空三加密數據解算
空三解算流程:GPS數據解算→內定向→相對定向→絕對定向→區域網平差→結果輸出。
4.3 地形圖制作
制作步驟:①以空三加密的成果為基礎,生成密集點云數據和DOM數據;②點云數據處理,過濾掉非地面點,生成DEM和等高線;③DOM數據的矢量化;④將矢量化的數據與等高線數據進行套合,進行最后的編輯與整飾,最終成產出滿足1∶1 000地形圖精度要求的產品。
5 精度分析
本次試驗總共抽取了54個檢測點,平面坐標和高程檢測位置相同,這些點分布在容易檢測的關鍵點上,主要分布在路邊線、房角、井蓋中心、圍墻等上面。以外業實測數據作為真實坐標,作為檢測的真實精度,航測內業測量的坐標與實測坐標進行對比。
5.1 平面精度分析
平面中誤差分布情況如圖1所示。《CHT9008.1—2010基礎地理信息數字成果1∶500 1∶1 000 1∶2 000數字線
劃圖》要求平面中誤差要小于0.3 m。由圖1可看出,最大誤差為0.19 m,最小為0.04 m,平面中誤差為0.11 m,因此測圖成果精度符合規范要求。
5.2 高程精度分析
高程中誤差分布情況如圖2所示。《CHT9008.1—2010基礎地理信息數字成果1∶500 1∶1 000 1∶2 000數字線
劃圖》要求高程中誤差要小于0.2 m。由圖1可看出,最小誤差為0.1 m,最大誤差為0.3 m,其中誤差為0.18 m,因此測圖成果精度符合規范要求。
6 結論
本文通過介紹GPS輔助無人機航空攝影的工藝流程,結合實例得出結論:①GPS輔助無人機航空攝影生產1∶1 000比例尺地形圖具有可行性;②在GPS輔助無人機航空攝影中1 km均勻布設一個像控點能滿足1∶1 000地形圖成圖規范要求;③GPS輔助無人機航空攝影在大比例尺測圖中能極大地提高生產效率,減少外業勞動強度,節約生產成本。
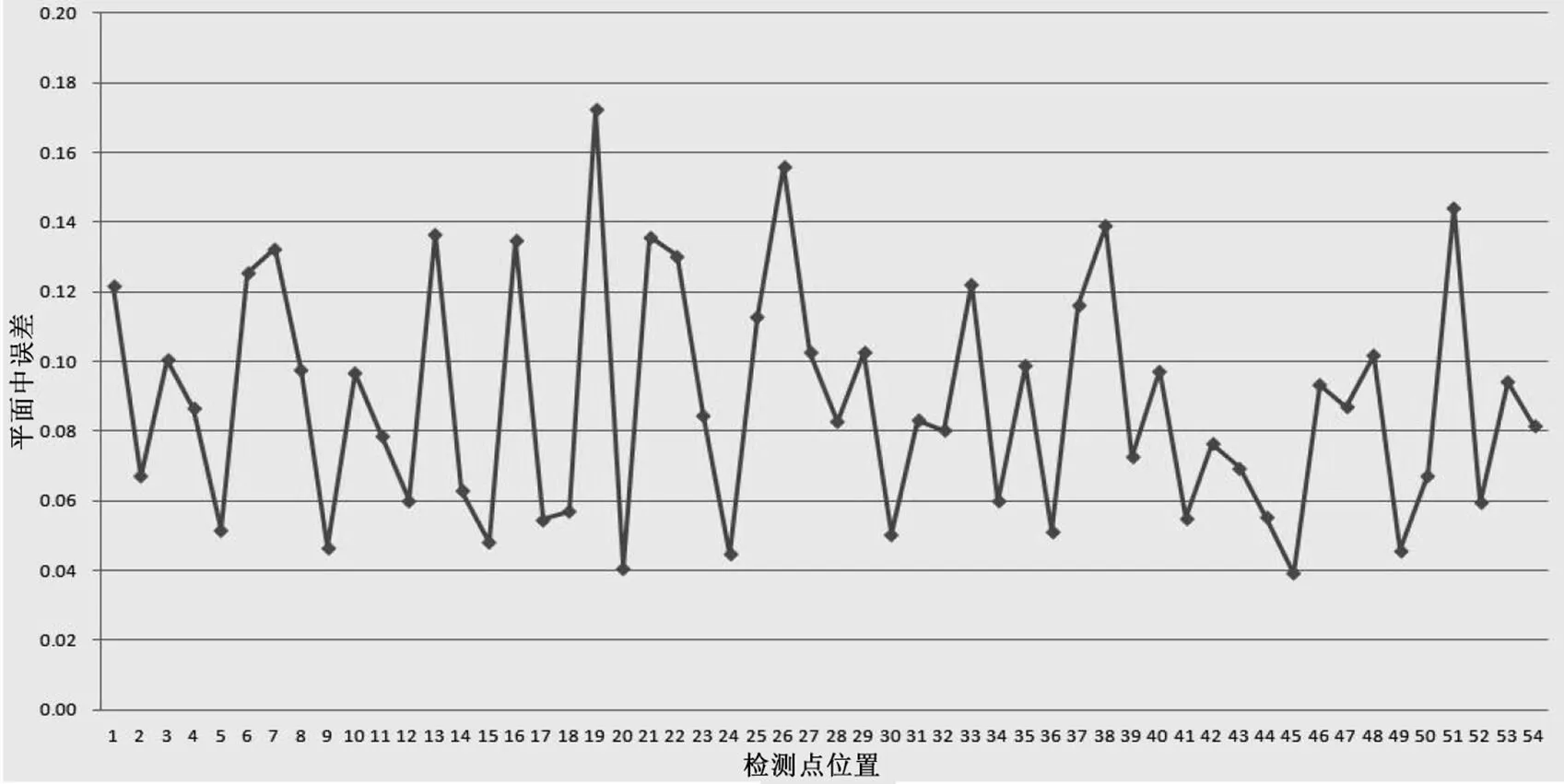
圖1 平面中誤差分布圖
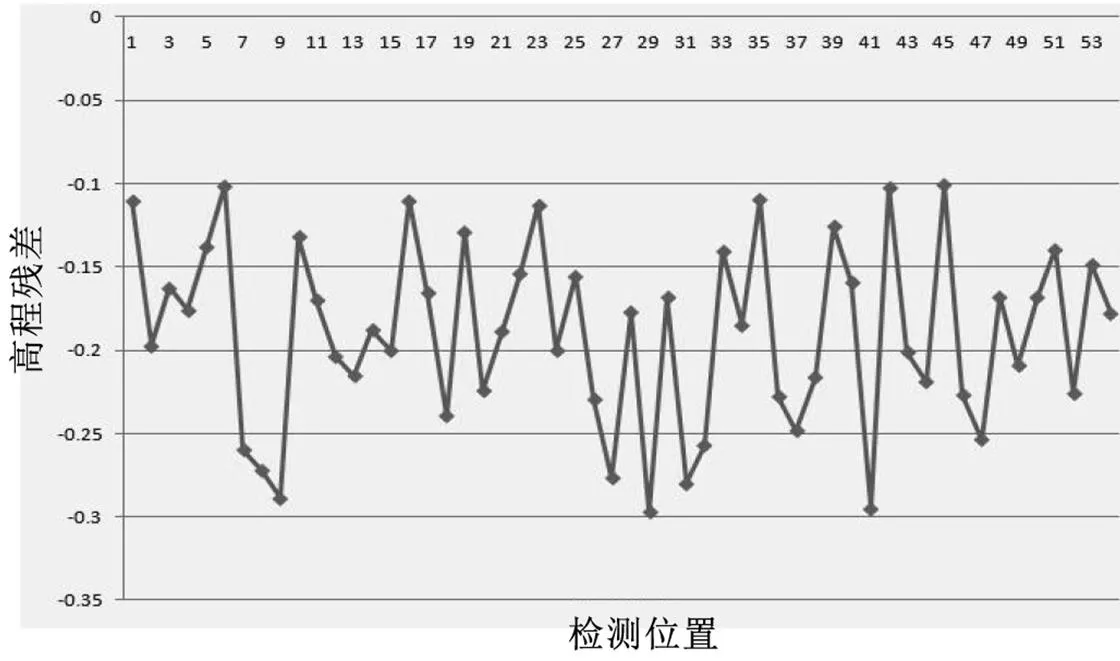
圖2 高程中誤差分布圖
[1]張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2003.
[2]袁修孝,高宇,鄒小容.GPS輔助空中三角測量在低空航測大比例尺地形測圖中的應用[J].武漢大學學報,37(11):1291-1293.
[3]張繼紅.無人機攝影測量技術的應用分析[J].城市建設理論研究(電子版),2013,36(26):45-47.
[4]孫曉華,朱長春.GPS輔助空中三角測量原理及應用[J].太江西測繪,2010,22(1):30-31.
〔編輯:嚴麗琴〕
2095-6835(2018)19-0154-02
P231.2
A
10.15913/j.cnki.kjycx.2018.19.154
