基于RST數(shù)字控制器的直流電機調(diào)速系統(tǒng)仿真設(shè)計
2018-10-10 11:11:16俞皖蘇
數(shù)字技術(shù)與應(yīng)用 2018年7期
俞皖蘇
摘要:本文從直流電機調(diào)速方法出發(fā),設(shè)計了數(shù)字化直流電機調(diào)速系統(tǒng)模型結(jié)構(gòu)。以MATLAB為工具,根據(jù)數(shù)字控制器設(shè)計的要求,對被控對象即直流電機進(jìn)行模型辨識。根據(jù)確定的模型為直流電動機設(shè)計RST控制器,建立Simulink模型來評估控制器的性能,并驗證閉環(huán)系統(tǒng)是否滿足建議的魯棒裕度。實現(xiàn)了采用RST數(shù)字控制器對直流電機調(diào)速系統(tǒng)的仿真設(shè)計。
關(guān)鍵詞:RST控制;直流電機;辨識;MATLAB仿真
中圖分類號:TM571 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-9416(2018)07-0001-03
1 研究背景與意義
直流電機調(diào)速系統(tǒng)的數(shù)字控制實現(xiàn)是目前全球電力電子行業(yè)研究的一個重要方向。鑒于微處理器控制性能好,以及它在應(yīng)用領(lǐng)域控制系統(tǒng)中的突破性發(fā)展,采用微處理器控制直流電機調(diào)速具有很高的實際意義和應(yīng)用價值。采用微處理器進(jìn)行控制,整個控制系統(tǒng)的結(jié)構(gòu)更加簡單,并且調(diào)速性能得到較大改善,因此是具有較高的性價比。
目前,我國的數(shù)字化直流調(diào)速控制在生產(chǎn)水平上尚且處于不成熟的階段,并沒有全數(shù)字化直流調(diào)速控制裝置的生產(chǎn)產(chǎn)商,需要依靠引進(jìn)國外設(shè)備,這大大增加了投資成本,影響經(jīng)濟效益。因此,對直流電機調(diào)速系統(tǒng)數(shù)字控制的研究在我國意義深遠(yuǎn)。
廣泛用于直流電機的速度控制的方法之一是PID控制[1]。然而,直流電機具有參數(shù)不確定性,并且易有擾動影響,在使用傳統(tǒng)的PID控制時,動態(tài)性能受到限制。針對電機對外部負(fù)載擾動和參數(shù)變化敏感的問題,研究人員開始在電機調(diào)速中采用RST控制器。M.Larbi[2]為了優(yōu)化永磁同步電動機的速度控制,使用一種配置有矢量PWM(脈沖寬度調(diào)制)逆變器的RST實驗方法,并提出了一種與負(fù)載觀測器相關(guān)聯(lián)的控制策略。實驗結(jié)果證明,該系統(tǒng)可以更好地控制電機運行,同時保證了具有良好的魯棒性和一定范圍內(nèi)的靈敏度。
2 直流電機調(diào)速系統(tǒng)與模型辨識
2.1 直流電機調(diào)速系統(tǒng)概述
直流電機轉(zhuǎn)速的數(shù)字化控制系統(tǒng)框圖如圖1所示。
在該系統(tǒng)中,由直流電機控制器計算產(chǎn)生相應(yīng)的控制信號u(t),并輸入功率放大器,使其輸出能夠驅(qū)動直流電機以目標(biāo)轉(zhuǎn)速運行的電壓。轉(zhuǎn)速計用以測量直流電機的轉(zhuǎn)動速度,并通過濾波器平滑測量數(shù)據(jù),獲得系統(tǒng)的輸出轉(zhuǎn)速y(t),同時作為直流電機控制器的反饋量,參與電機的調(diào)速控制。
2.2 系統(tǒng)模型辨識
為了獲得直流電機的模型,本文采用系統(tǒng)辨識的方法[3],依據(jù)來自loan.D.landau的256組以PRBS偽隨機序列控制信號疊加穩(wěn)態(tài)控制信號作為系統(tǒng)的輸入u(t),以及電機轉(zhuǎn)速輸出y(t)的公開數(shù)據(jù),獲得調(diào)速系統(tǒng)的模型。
本文中系統(tǒng)的辨識過程包括四個步驟:
(1)在設(shè)定的實驗條件下采集輸入、輸出數(shù)據(jù);(2)選擇或估計模型結(jié)構(gòu)和復(fù)雜度;(3)估計模型參數(shù);(4)驗證辨識模型。
圖2展示了直流電機轉(zhuǎn)速控制系統(tǒng)的結(jié)構(gòu)框圖,其中,功率放大器、直流電機、轉(zhuǎn)速計、濾波器是辨識的對象。
在對直流電機進(jìn)行離散化模型辨識時,首先,導(dǎo)入采集的輸入輸出數(shù)據(jù)。使用基于輔助變量(Instrumental Variables,IV)的復(fù)雜度估計算法,得到的實驗結(jié)果。
實驗結(jié)果表明,在系統(tǒng)最高階次等于2時,其輔助代價函數(shù)取得最小值。同理,可由輔助代價函數(shù)極值確定系統(tǒng)各項階次。可得:系統(tǒng)最高階次N=2,系統(tǒng)時延d=0,多項式B(q-1)的階次NB=2,多項式A(q-1)的階次NA=1。
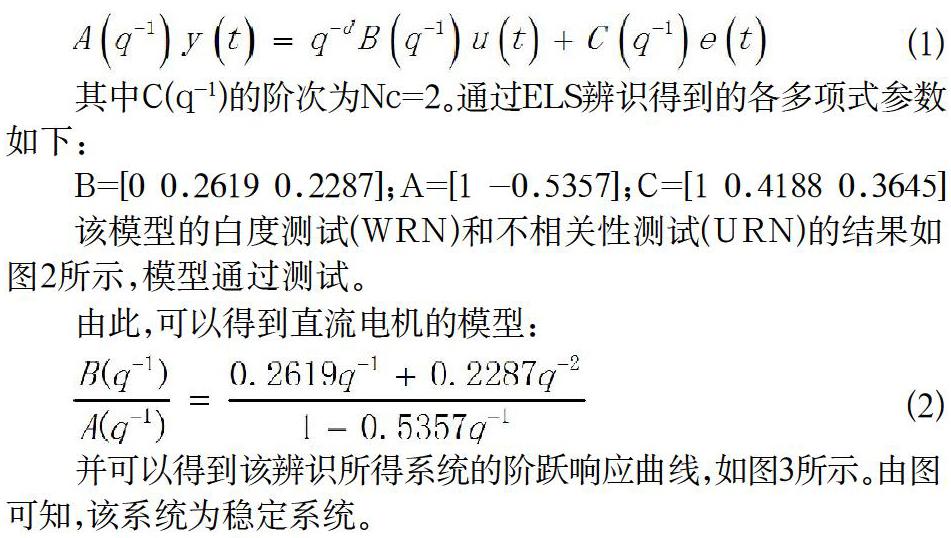
在確定了模型復(fù)雜度之后,選擇合適的遞歸方法進(jìn)行辨識。通過實驗可知,增廣最小二乘法[4](ELS)辨識得到的模型通過了模型驗證,且與實際物理模型相符。這種情況下對應(yīng)的對象及擾動的模型為:
該模型的白度測試(WRN)和不相關(guān)性測試(URN)的結(jié)果如圖2所示,模型通過測試。
由此,可以得到直流電機的模型:
并可以得到該辨識所得系統(tǒng)的階躍響應(yīng)曲線,如圖3所示。由圖可知,該系統(tǒng)為穩(wěn)定系統(tǒng)。
3 RST數(shù)字控制器
3.1 RST數(shù)字控制器結(jié)構(gòu)
在電氣工程應(yīng)用中,RST數(shù)字控制器的應(yīng)用越來越廣泛[5]。它的一般形式如圖4所示。
R(q-1)和S(q-1)是關(guān)于q-1的多項式,多項式的系數(shù)由不同的控制器的性能決定。而q-1為時延算子,也可等效理解為復(fù)變量z-1。
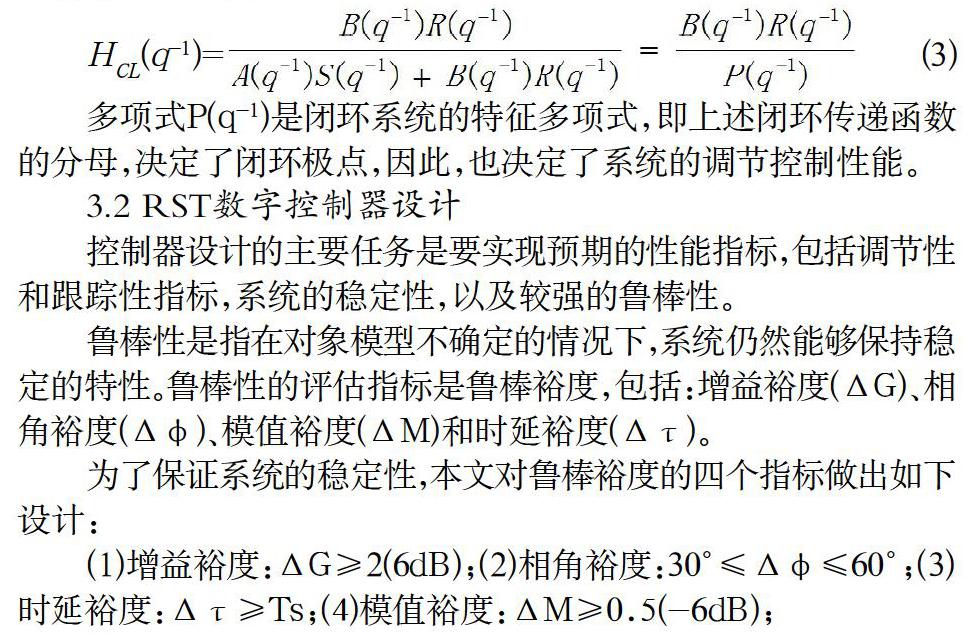
在圖4展示的RST控制器結(jié)構(gòu)中,參考輸入r(t)到參考輸出y(t)的閉環(huán)傳遞函數(shù)為:
多項式P(q-1)是閉環(huán)系統(tǒng)的特征多項式,即上述閉環(huán)傳遞函數(shù)的分母,決定了閉環(huán)極點,因此,也決定了系統(tǒng)的調(diào)節(jié)控制性能。
3.2 RST數(shù)字控制器設(shè)計
控制器設(shè)計的主要任務(wù)是要實現(xiàn)預(yù)期的性能指標(biāo),包括調(diào)節(jié)性和跟蹤性指標(biāo),系統(tǒng)的穩(wěn)定性,以及較強的魯棒性。
魯棒性是指在對象模型不確定的情況下,系統(tǒng)仍然能夠保持穩(wěn)定的特性。魯棒性的評估指標(biāo)是魯棒裕度,包括:增益裕度(ΔG)、相角裕度(Δφ)、模值裕度(ΔM)和時延裕度(Δτ)。
為了保證系統(tǒng)的穩(wěn)定性,本文對魯棒裕度的四個指標(biāo)做出如下設(shè)計:
(1)增益裕度:ΔG≥2(6dB);(2)相角裕度:30°≤Δφ≤60°;(3)時延裕度:Δτ≥Ts;(4)模值裕度:ΔM≥0.5(-6dB);
因此,在根據(jù)動態(tài)響應(yīng)特性確定了控制器的參數(shù)后,應(yīng)對系統(tǒng)的以上幾項指標(biāo)進(jìn)行魯棒性檢驗。
4 基于RST數(shù)字控制器的直流電機調(diào)速系統(tǒng)
4.1 直流電機調(diào)速系統(tǒng)數(shù)字控制器設(shè)計
利用辨識得到的直流電機模型,即式(2)作為被控對象。觀察模型可以發(fā)現(xiàn),該系統(tǒng)有一個接近[-1,j0]的穩(wěn)定零點,選用極點配置的方法設(shè)計控制器。根據(jù)模型系統(tǒng)的階躍響應(yīng)(圖3)可以得到,系統(tǒng)的上升時間約為4.5Ts,幾乎沒有超調(diào)。為了改善系統(tǒng)的動態(tài)響應(yīng)性能,考慮減少上升時間,設(shè)置自然頻率ω0=75rad/s,阻尼比ξ=0.9,并將系統(tǒng)離散化,得到的分母即對象系統(tǒng)脈沖傳遞函數(shù)的特征多項式P,多項式R(q-1)和S(q-1)也可以根據(jù)P進(jìn)行求解。至此,已確定了控制器的調(diào)節(jié)控制特性。在設(shè)計跟蹤控制時,可以選擇同樣的數(shù)值,即ω0=75rad/s,ξ=0.9。
設(shè)計結(jié)果如表1。
分別作系統(tǒng)和靈敏度的波特圖,如圖5和6所示,通過檢驗圖中各個魯棒裕度,確保設(shè)計的數(shù)字控制系統(tǒng)具有較好的魯棒性。
由圖5可以看出,系統(tǒng)的增益裕度為10.1dB,相角裕度為57.8deg,時延裕度為1.44Ts。在數(shù)字控制系統(tǒng)靈敏度曲線中,模值裕度和靈敏度函數(shù)的關(guān)系為,模值裕度是靈敏度函數(shù)Syp(z-1)極大值的倒數(shù),而圖6所作數(shù)字控制系統(tǒng)靈敏度曲線,曲線的峰值即為-ΔM,因此可得模值裕度為-4.08dB。
4.2 調(diào)速系統(tǒng)的仿真與性能分析
利用Simulink搭建控制系統(tǒng)的模型。仿真結(jié)果如圖7所示,直流電機系統(tǒng)輸出圖中的兩條曲線分別為輸入的階躍信號和電機離散系統(tǒng)輸出的響應(yīng)情況。由圖可以觀察得到系統(tǒng)的上升時間約為50ms,在T=1s時加入了擾動(擾動為幅值為-0.25的階躍信號),抑制擾動的總時間約為40ms,系統(tǒng)的調(diào)節(jié)和跟蹤性能良好。
5 結(jié)語
本文針對直流電機調(diào)速的問題,以MATLAB為仿真工具,設(shè)計了一個RST數(shù)字控制器。主要研究成果如下:
根據(jù)直流電機的電樞電壓調(diào)速的基本原理,通過改變直流電機的電樞電壓為控制方式,設(shè)計了直流電機數(shù)字化控制系統(tǒng)。
使用系統(tǒng)辨識的方法得到被控電機的模型。本文采用256組直流電機的輸入輸出數(shù)據(jù)作為實驗的數(shù)據(jù)。通過復(fù)雜度分析確定了對象模型的階數(shù),再通過實驗和驗證,發(fā)現(xiàn)使用增廣最小二乘法可以辨識出這組數(shù)據(jù)對應(yīng)的直流電機模型。即得到了本研究中被控對象的傳遞函數(shù),這是控制器設(shè)計的一個重要條件。
以極點配置為基本方法完成了RST控制器設(shè)計。RST控制律設(shè)計的依據(jù)是系統(tǒng)的期望性能指標(biāo),根據(jù)為系統(tǒng)預(yù)設(shè)上升時間和超調(diào),得到控制系統(tǒng)的閉環(huán)傳遞函數(shù)。因此設(shè)計的系統(tǒng)具有很好的調(diào)節(jié)性和跟蹤性。使用Simulink仿真,對系統(tǒng)進(jìn)行魯棒性檢驗,確認(rèn)系統(tǒng)在受到擾動的情況下具有很好的魯棒性能。
參考文獻(xiàn)
[1]Y. T. Kim & S. H. Back.The Speed Regulation of a DC Motor Drive System with a PI, PID,and Command Matching Controllers[J].DonggukJournal,1990,(29):525-541.
[2]Larbi M, Hassaine S, Moreau S, et al.Speed control by RST with load observer of a Permanent Magnet Synchronous Motor[C]// Power Electronics and Motion Control Conference.IEEE,2010:10-25.
[3]Landau I D,Gianluca Z.Digital Control Systems[M].Holt, Rinehart and Winston,1980.
[4]王琳,馬平.系統(tǒng)辨識方法綜述[J].電力科學(xué)與工程,2001,(4):63-66.
[5]Longchamp R.Commande numérique de systèmes dynamiques[J].European Journal of the History of Economic Thought,1995,19(3):1-3.
[6]Khlaief A, Bendjedia M, Boussak M, et al. A Nonlinear Observer for High-Performance Sensorless Speed Control of IPMSM Drive[J].IEEE Transactions on Power Electronics, 2012,27(6):3028-3040.
[7]Bendjedia M, Ait-Amirat Y, Walther B, et al. Position Control of a Sensorless Stepper Motor[J]. IEEE Transactions on Power Electronics,2012,27(2):578-587.
