基于CoDeSys的EtherCAT總線控制系統設計
2018-10-10 01:43:24郭奕鑫劉江帆
現代工業經濟和信息化 2018年12期
郭奕鑫, 劉江帆
(廣東水利電力職業技術學院,廣東 廣州 510925)
1 項目簡介
本套系統主要采用德國3S公司研發的軟件—CoDeSys,CoDeSys環境中集成了多種總線協議,EtherCAT協議作為一種基于以太網技術的工業現場總線,具有諸多的優點,無論是從傳輸速度,還是在開放性及安全性方面都更優于傳統的現場工業總線。EtherCAT總線采用“一網到底”的概念,即協議在處理過程直達底層,中間過程不需要任何的轉換設備或是子總線,在CPU的循環時間和任務處理速度上傳輸速率能夠達到100 Mb/s,幾乎無網關延時。其優越的性能及總線的處理速度區別于傳統的現場工業總線[1]。
2 系統的硬件設計
硬件上采用三層架構,主要表現如圖1所示,第一層采用研華工控機及其輔助設備;第二層主采用支持EtherCAT總線的的華泰遠程IO模塊,針對下層系統實現完全的控制及監控;第三層則為車庫執行系統,主要由步進驅動器、傳感器、輔助按鈕等開關量及采集信號構成。
EtherCAT總線的遠程IO模塊主包括華泰smartLink的FR8200適配器模塊、8位數字量輸入的FR1118模塊、8位數字量輸出的FR2118模塊、2路高速計數器FR5002模塊及支持EtherCAT總線的雷賽步進驅動器。
數字量輸入模塊主要用在輔助設備和傳感器信號的采集,判斷當前車位的使用情況,另一方面也實時檢測出入庫車輛的數量。高速計數器模塊用于反饋執行機構的實時位置,與控制系統形成閉環控制,雷賽步進驅動器用于控制電機,以實現執行機構的運動。
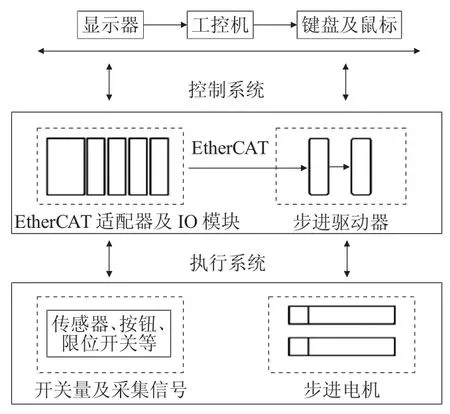
圖1 硬件結構
3 控制系統的軟件設計
系統的軟件設計主要有三方面的內容組成:EtherCAT總線的配置、控制程序的編寫和可視化界面的設計,如圖2所示。
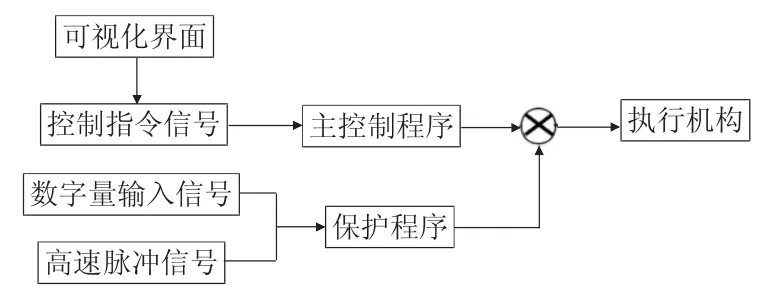
圖2 控制系統的軟件架構
3.1 EtherCAT總線的配置
利用CoDeSys平臺對設備進行編程,需要在項目Device設備管理器上配置總線管理器,即配置EtherCAT現場總線主站。針對EtherCAT現場總線主站再配置從站模塊,相應地從站模塊需要在CoDeSys開發環境中安裝對應的XML文件,即設備描述文件。對于運動控制模塊的設計,要在項目樹中的EtherCAT_Task中調用主程序,否則運動控制系統將無法正常響應。
3.2 控制程序設計
本設計的輸入信號主要包括數字量信號、高速脈沖信號及可視化界面的控制指令信號。輸入的數字量信號主要是對進場車輛和車庫車位進行檢測,保護單元程序再根據檢測結果判定存取車輛是否滿足先決條件,同時高速計算器信號將實時反饋傳動機構的位置。在符合存取車的條件下,通過發送控制指令信號并經過主控制程序邏輯分析后,將控制對應的執行機構動作,將車輛送到指定位置。否則,控制系統將不執行控制指令的請求。
3.3 可視化界面設計
CoDeSys開發環境中可在項目應用中添加網絡可視化界面,同時一個codesys工程文件中可包含多個可視化對象,并且在不同的對象之間可以用通訊連接。在編輯項目中,通過簡單的拖動及配置即可關聯PLC變量[2]。在程序調試階段,可將控制程序和可視化程序一同下載進控制器,通過移動智能設備瀏覽器訪問網絡視圖進行調試,突破了現場調試的硬件局限。在用戶選擇服務時,只需掃描特定的二維碼,便可在手機或Ipad等移動智能設備上進行存取車服務。
本控制系統可視化界面分為系統界面和用戶界面。系統界面主要是供控制系統后臺維護使用,包含了系統的內部參數設置、報警顯示、數據記錄和功能調試等方面。用戶界面主要是供用戶進行停取車服務以及顯示車位使用情況和停取車進度等信息。
4 結語
通過實驗室平臺測試,該控制系統能夠實現遠程維護和無人值守,用戶可通過手機等移動智能設備自助停取車輛,并可獲取車庫的車位情況停聽取車服務狀態等信息,與傳統的車庫控制系統相比,有較大的應用前景。
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當代陜西(2020年13期)2020-08-24 08:22:02
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
電子制作(2018年11期)2018-08-04 03:25:42
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11