內窺鏡夾持機器人驅動電機參數的確定*
2018-10-10 11:20:48趙中華
機械制造 2018年7期
□ 王 琰 □ 趙中華
上海工程技術大學機械工程學院 上海 201600
1 研究背景
醫療機器人的發展推動了國民生活水平的提高。微創手術中的腹腔內窺鏡手術,只需要在患者腹部打三四個直徑為2~3 mm的孔,出血量小,傷口愈合快,極大減輕了病人的痛苦[1]。在微創手術中,內窺鏡相當于醫生的眼睛。在手術過程中,要求內窺鏡能夠提供合適的手術視野給醫生,同時還要保證提供穩定清晰的畫面,這對內窺鏡夾持機器人的動態特性提出了較高的要求。醫療器械的電機選型問題比通用電機選型要求高,不僅要求電機體積小,而且由于使用環境比較極端,要求電機具有便于消毒、噪聲小、啟停頻繁、精確度高、可靠性高等特點。筆者主要針對內窺鏡夾持機器人的運動特點,結合醫療環境等相關影響因素,使用Adams仿真軟件進行運動學仿真,并使用MATLAB軟件進行數據處理,最終確定其驅動電機的參數,為醫療器械電機選型提供參數確定方法,在保證機器人功能的前提下,最大程度降低成本,縮短設計周期。
2 內窺鏡夾持機器人概述
目前微創手術已經得到了普遍應用,醫療器械的自動化程度逐漸提高。腹腔內窺鏡手術中,對內窺鏡的夾持是非常重要的,內窺鏡夾持機器人如圖1所示。內窺鏡夾持機器人在手術過程中共需要四個自由度,即內窺鏡通過穿刺點后,能夠圍繞穿刺點進行X軸、Y軸方向的轉動,沿穿刺點軸向的直線運動,以及內窺鏡自身的轉動[2]。對內窺鏡夾持機器人的要求為體積小,可靠性高,與醫生的交互性好,在手術過程中能夠不干擾醫生的操作,靈活性高。
內窺鏡夾持機器人要求圍繞穿刺點進行轉動,因此采用雙平行四邊形單自由度運動方式。豎直方向的轉動通過整體結構的翻轉來實現,夾持內窺鏡的末端直線運動通過滾珠絲杠或者導軌滑塊等結構實現。內窺鏡在腹腔手術過程中需要進行小幅度緩慢轉動,當達到醫生所需要的位置后,要求能夠保持長時間的固定姿態或者小幅度調整,最終為醫生提供清晰穩定的畫面。實現圍繞穿刺點進行轉動的結構如圖2所示,桿通過鉸鏈固定在支架上為驅動桿為末端執行件,連桿通過鉸鏈連接在桿及末端執行件上。當驅動桿件轉動角θ時,末端執行件也相應轉動角θ。
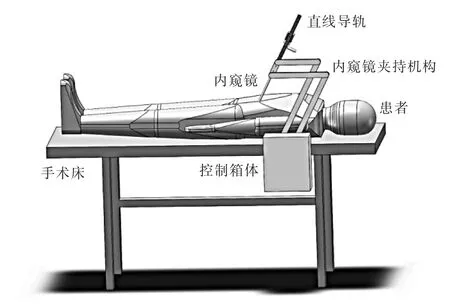
▲圖1 內窺鏡夾持機器人

▲圖2 繞穿刺點轉動結構示意圖
3 傳統伺服電機選型步驟
伺服電機廣泛應用于機床及汽車等機械行業,作為動力的核心部件,選型的合理性關系到生產成本和產品質量[3]。對伺服電機進行選型的主要步驟如下:①根據機械結構特點,計算各構件的轉動慣量,并折算到總電機軸上,得到需要的總轉動慣量;②當機器空載運行時,折算各構件的負載轉矩,最終計算出電機軸所需要的負載轉矩;③當機器承受最大載荷作用時,計算出電機軸需要的負載轉矩;④根據實際工作需要,以最大負載轉矩作為等效負載轉矩。
4 醫用電機選型要點
傳統的伺服電機選型,通常根據慣量折算、扭矩折算等公式表格來計算等效轉動慣量及等效負載轉矩,計算量大,對使用的工作環境要求不高,而且精度與可靠性要求較低。在醫療器械的驅動電機選型問題上,可靠性和精確度是最為關鍵的影響因素。在醫療器械驅動電機選型時,還需要保證機器能夠運行平穩,便于消毒。筆者主要簡化內窺鏡夾持機器人結構,利用SolidWorks軟件進行建模,導入Adams軟件進行運動學仿真與求解,并利用MATLAB軟件對驅動電機參數進行精確計算與合理的數據處理,優化機器人的運動特性,縮短設計周期。
5 夾持機器人建模與求解
5.1 建模與仿真
利用SolidWorks、軟件Adams View 2016軟件分別對內窺鏡夾持機器人進行建模和仿真。
5.1.1 設置工作環境
設置單位為“MMKS”,設置重力方向為-Y軸,重力值默認。
5.1.2 構建模型
筆者主要利用SolidWorks軟件進行建模,在構建內窺鏡夾持雙平行四邊形結構過程中,忽略精確尺寸和形狀,用簡單鉸鏈代替復雜的關節連接及內窺鏡的夾持結構。建立簡單模型后,生成Parasolid(*.x_t)中間文件,將中間文件導入Adams軟件,具體結構如圖3所示。導入的結構只具有外形特征,因此需要進一步對桿件屬性進行賦值。
5.1.3 施加約束
圖3中 A、B、C、D、E、F、G 處都采用轉動鉸鏈約束。
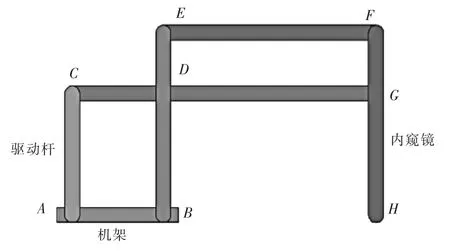
▲圖3 內窺鏡夾持機器人結構簡圖
5.1.4 添加驅動
根據內窺鏡夾持機器人的運動特征,確定繞穿刺點轉動的一個運動周期。驅動桿在豎直狀態為初始狀態,θ為π/2。在逆時針旋轉時,用正向角表示。一個運動周期為60 s,驅動桿的角位移函數以Y軸正方向為起始位置,具體如式 (1)所示,同時利用MATLAB軟件進行數據處理,得到角度時間關系曲線,如圖4所示。
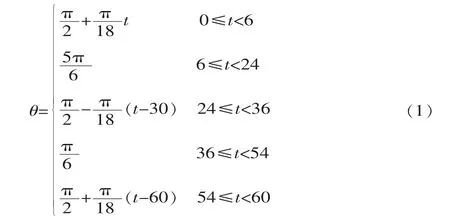
式中:t為時間,s。
在Adams軟件中添加驅動桿的角位移函數,軟件默認驅動桿豎直狀態角位移為0,具體函數為:
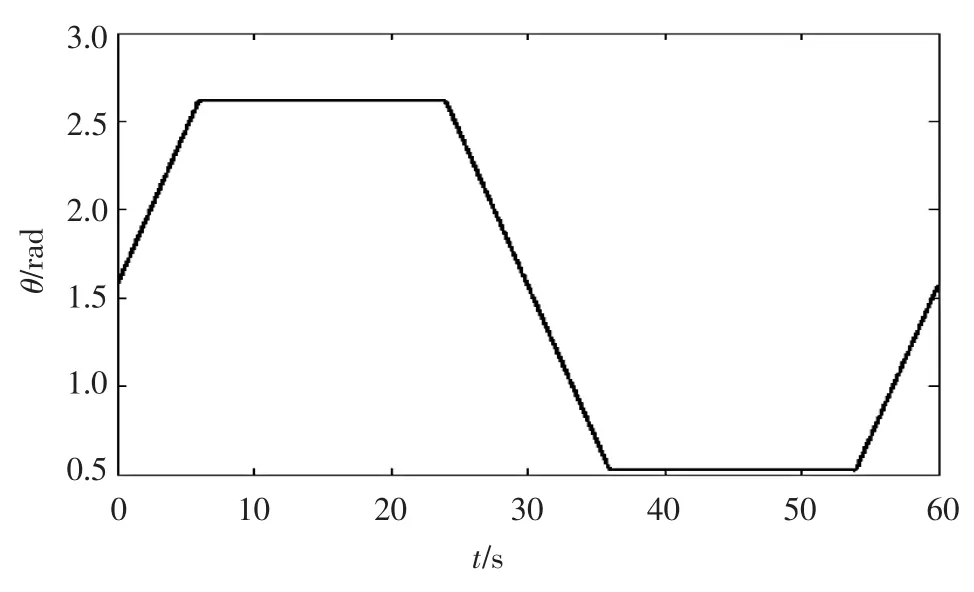
▲圖4 驅動桿AC角度時間關系曲線

5.1.5 運動學仿真
對內窺鏡夾持機器人機構進行運動學仿真,設置時長為60 s,步數為2 000,步數值可以根據觀察需要進行修改。
5.2 驅動轉矩與等效轉動慣量
通過Adams軟件能夠直接仿真出雙平行四邊形機構驅動桿的轉矩,而仿真得到的等效慣量只是將雙平行四邊形機構的總動能轉化到驅動桿上,獲得與轉動慣量擁有相同量綱的數值,但并非是真正的轉動慣量[4]。雙平行四邊形機構的總動能E可以根據動能定理計算得到:

式中:E1、E2、E3、E4、E5依次為桿件的動能。
E1~E5動能數值都可以通過Adams軟件仿真直接得到,然后利用MATLAB軟件進行計算,得到總動能。

式中:ω1為驅動桿的角速度。
5.3 仿真結果分析
在對雙平行四邊形機構仿真之后,可以從Adams軟件中提取出驅動轉矩、功耗等相關參數,總動能及等效轉動慣量可以根據式(2)、式(3)計算得到。
5.3.1 驅動轉矩與功耗
圖5所示為雙平行四邊形機構在一個運動周期內驅動轉矩T與時間的關系曲線。當驅動桿逆時針轉動時,轉矩是負值,且隨轉動角度的增大而減小。在雙平行四邊形機構的一個運動周期內,轉矩是對稱變化的,轉矩的最大絕對值為11.91 N·m。雙平行四邊形機構驅動電機功耗P與時間的關系曲線如圖6所示。由于轉動過程中角速度和轉動角度都是對稱相等的,因此功耗也是正功和負功對稱相等的,且都是在運動到極限位置時達到最大值,約為2.07 W。

▲圖5 驅動轉矩時間關系曲線
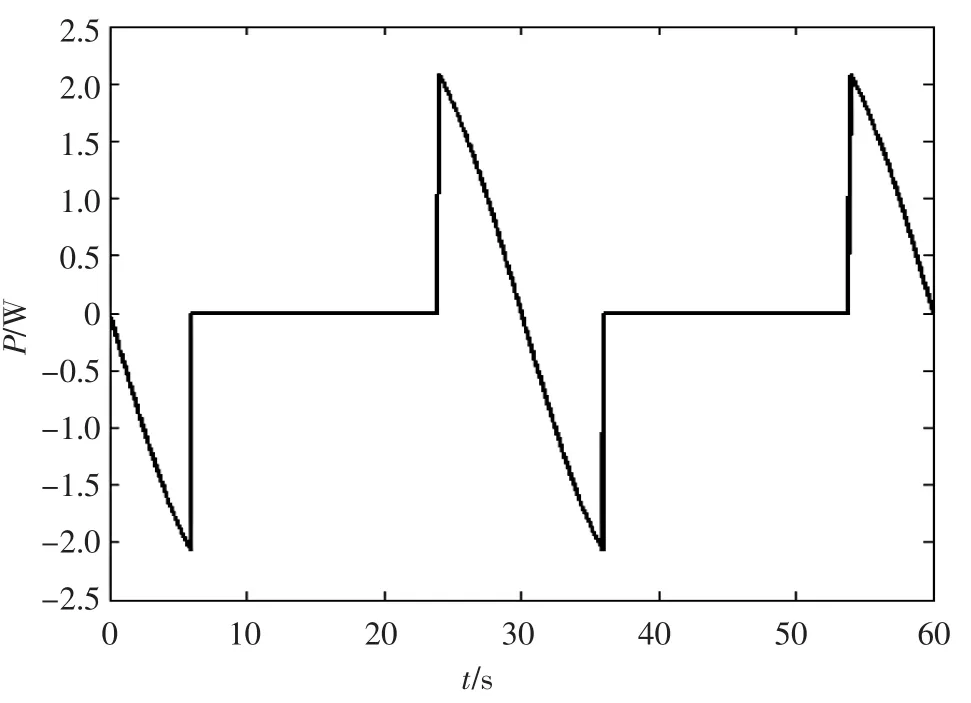
▲圖6 功耗時間關系曲線
5.3.2 動能與等效轉動慣量
雙平行四邊形機構總動能E與時間關系曲線如圖7所示。總動能根據式(2)計算得到,其中每個運動桿件的動能是通過Adams軟件獲取的。等效轉動慣量J與時間關系曲線如圖8所示。需要注意的是,等效轉動慣量可通過式(3)計算得到,最大等效轉動慣量為128.49 N·m·s2。當內窺鏡在一個運動行程結束以后,需要保持靜止一段時間,為醫生的手術操作預留時間。當機構保持靜止時,動能為0,同時等效轉動慣量也為0,對整體電機參數確定的影響可以忽略不計。
6 驅動電機參數確定
驅動電機應用在微創手術機器人方面,要求具有可靠性高、體積小、響應快、精度高、運行噪聲小等特點。對驅動電機參數進行較為精確的計算是進行選型的關鍵一步。有效利用現有軟件工具,結合經驗理論計算,可以快捷確定內窺鏡夾持機器人的驅動電機參數。
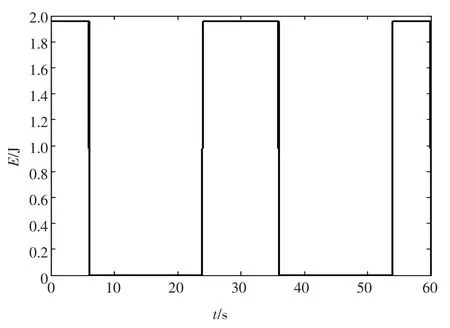
▲圖7 總動能時間關系曲線
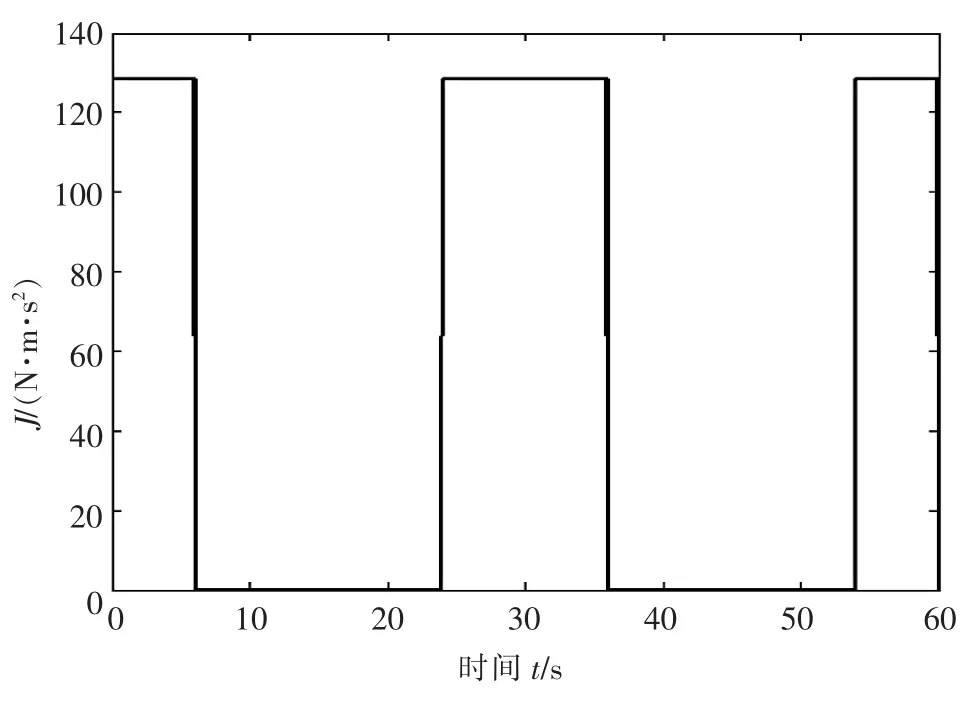
▲圖8 等效轉動慣量時間關系曲線
6.1 額定轉矩
轉矩容量的選擇有多個原則,平均轉矩可以根據轉矩的變化規律,采用均方根轉矩計算[5]:

式中:tp為一個負載工作的周期時間;T為瞬時轉矩;Trms為平均轉矩。
用Adams軟件進行仿真,導出數據,再利用MATLAB軟件進行數值求解,得到平均轉矩為79.46 N·m。選擇的額定轉矩要大于平均轉矩,計算額定轉矩TR采用相關經驗公式:

式中:K1為安全因數,一般取K1=1.2;K2為轉矩波因數,矩形轉矩波因數取K2=1.05,三角形轉矩波因數取K2=1.67,圖5所示的梯形轉矩波因數取K2=1.4。
6.2 轉動慣量
負載轉動慣量JL直接影響伺服電機的靈敏度、系統精度和動態性能。手術過程中需要電機有高的靈敏度,人機交互友好,因此主要考慮選取慣量較小的伺服電機。
電機轉子的轉動慣量JM與負載轉動慣量JL滿足下式:

得到準確的轉矩及等效轉動慣量之后,結合電機轉動所需要的轉速選擇減速器。由于醫療機器人要求精度高且可靠性高,因此需要搭配相應的編碼器進行控制和調節。綜合而言,采用體積小、質量輕及可靠性高的電機是最佳選擇[6-8]。
7 結論
選用Maxon電機,以及與之配合使用的編碼器與控制器,制作內窺鏡夾持機器人樣機。試驗證明,Maxon電機能夠快速響應,驅動內窺鏡夾持機器人樣機精準地運行。
針對醫療器械上使用的驅動電機的參數確定問題,還沒有比較成熟的體系。通過使用相關軟件與經驗公式,可以得到較為精準的驅動電機相關參數[9-10],大大減少計算量,提高工作效率,縮短設計周期。
