飛行器跨超聲速風洞試驗模型中尾支撐結構的力學特性研究
2018-10-10 11:25:50毛代勇
機械制造 2018年7期
□ 郝 東 □ 毛代勇 □ 余 婧 □ 張 林 □ 吳 晗
1.中國空氣動力研究與發展中心高速空氣動力研究所 四川綿陽 621000
2.中國空氣動力研究與發展中心計算空氣動力研究所 四川綿陽 621000
飛行器的氣動力研究對于飛行器的外形設計、飛行控制等工作具有重要意義,準確的氣動力參數可以為飛行器的氣動特性設計和飛行控制系統研制提供依據。目前,得到飛行器氣動力參數的途徑主要有兩種,一種是數值仿真[1-4],另一種是風洞試驗[5-7]。 風洞試驗無疑是獲得飛行器氣動力參數最為準確、直接和可靠的手段。大部分飛行器在大型風洞試驗時采用的是尾支撐連接方式,設計得到靜態剛度高、動態性能好的風洞試驗模型尾支撐結構對于飛行器的風洞試驗具有現實意義。
筆者針對飛行器2.4 m×2.4 m跨超聲速風洞試驗,面向風洞全模試驗段設計了試驗模型的尾支撐結構,并對尾支撐結構進行了力學建模,采用ABAQUS有限元分析求解器求解方程[8],研究尾支撐結構的靜力學和動力學特性,為后續風洞試驗支撐結構的研發提供技術支持。
1 力學建模
1.1 結構設計
根據試驗模型機械接口尺寸約束、風洞試驗段機械接口尺寸約束和氣動影響約束等條件,設計了飛行器跨超聲速風洞試驗模型尾支撐結構,如圖1所示。在圖 1中,尾支撐結構主要有四部分:模型或天平機械接口、受力桿件、試驗段機械接口和信號線走線口。模型或天平機械接口將試驗模型或測量天平與尾支撐結構前端相連接。受力桿件是尾支撐結構的主要傳力與受力部分。試驗段機械接口將尾支撐結構與試驗段相連接,將試驗模型緊固安裝于試驗段之中。信號線走線口是測量信號線的走線部分,信號線在尾支撐結構內部走線,可以減小信號對流場的擾動,同時增強信號的穩定性。在圖1中,X軸方向為氣流方向,Y軸方向在結構對稱面內垂直于X軸向上,Z軸、X軸和Y軸形成右手坐標系。
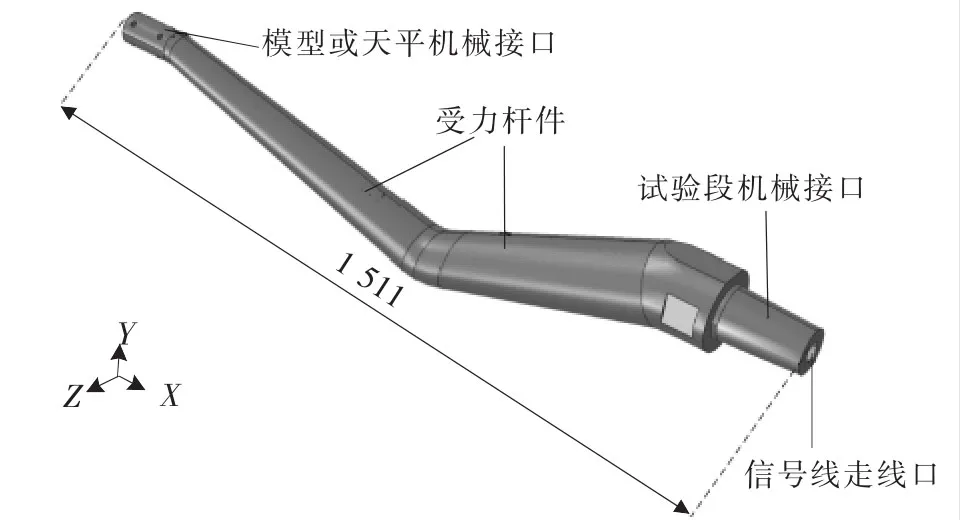
▲圖1 尾支撐結構
1.2 等效柔度矩陣
為了得到尾支撐結構三個方向的靜態等效柔度特性,在模型機械接口端面施加三個方向的力Fx、Fy和Fz,計算得到對應的位移 ux(Fx)、uy(Fx)、uz(Fx)、ux(Fy)、uy(Fy)、uz(Fy)、ux(Fz)、uy(Fz)、uz(Fz)。
當力為Fx時,尾支撐結構僅在XOY平面內發生變形,則 uz(Fx)=0,即柔度 Jxz=0。 根據 Fx與 ux(Fx)、uy(Fx)的關系,即可得到 Fx對 ux的柔度 Jxx、Fx對 uy的柔度Jxy:

其它兩個方向同理。根據力F的作用效果疊加原理,式(1)可以擴展為:

式中:u為尾支撐結構模型安裝端的位移矢量;Jyx為Fy對 ux的柔度;Jzx為 Fz對 ux的柔度;Jyy為 Fy對 uy的柔度;Jzz為Fz對uz的柔度;Jeff為等效柔度矩陣。
則等效剛度矩陣Keff為:

經過大量仿真發現,在考慮幾何變形影響時,尾支撐結構模型安裝端某一方向的位移ui與該方向的力Fi具有如下數學形式:

式中:a和b均為待確定系數。
1.3 有限元求解
采用四節點四面體單元進行網格劃分,單元長度設為10 mm,試驗段機械接口為固定支撐邊界條件,加載位置為模型或天平機械接口的端面。尾支撐結構的制造材料為00Ni18Co8Mo5TiAl馬氏體時效鋼,簡稱F141[9],其彈性模量為 187.25 GPa,泊松比為 0.274 3,密度為8 000 kg/m3。尾支撐結構總質量為102 kg。所得到的有限元模型如圖 2所示,單元數為109 870,節點數為22 623,總自由度數為67 869。將有限元計算結果用于檢驗等效柔度矩陣模型,并分析尾支撐結構的動態特性。
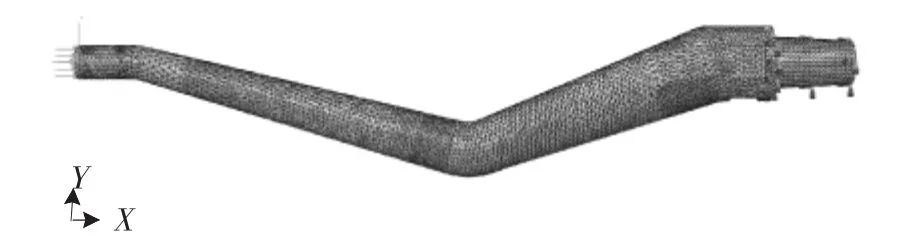
▲圖2 尾支撐結構有限元模型
2 仿真分析
2.1 靜態特性
將有限元計算結果作為準確值,用于確定等效柔度矩陣中的各個元素。在有限元計算中,力Fx、Fy、Fz的取值為 20 000 N、40 000 N、…、200 000 N。
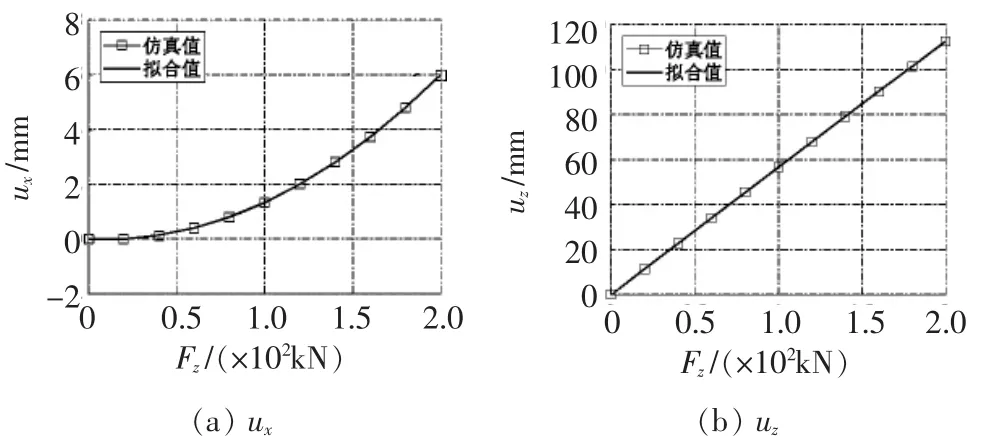
當作用力在X軸方向時,ux、uy與Fx的關系曲線如圖3所示。當作用力在Y軸方向時,ux、uy與Fy的關系曲線如圖4所示。當作用力在Z軸方向時,ux、uz與Fz的關系曲線如圖5所示。擬合得到的等效柔度矩陣元素結果見表1。

表1 等效柔度矩陣元素
由圖3~圖5和表 1結果可知,所建立的等效柔度矩陣模型能夠很好地表征尾支撐結構的總體柔度特性,等效柔度矩陣計算值與有限元直接仿真值具有較好的一致性,三個方向的擬合度均在0.999 99以上。此外,通過研究還發現,等效柔度矩陣中的每個元素值并不是一個常數,而是與關聯方向的力成二次關系,且常數項為0。
為進一步驗證所建立的尾支撐結構等效柔度矩陣的正 確性 ,選擇 載 荷 (Fx、Fy、Fz)為 (30 kN,25 kN,25 kN)、(30 kN,40 kN,25 kN)、(30 kN,40 kN,45 kN)、(50 kN,40 kN,25 kN)、(50 kN,40 kN,45 kN) 共五種復合加載情況進行驗證,有限元計算結果與等效柔度矩陣計算結果見表2。由表2可知,在復合載荷情況下,最大相對誤差小于5%,滿足工程上快速估算的使用要求。
2.2 動態特性
在分析尾支撐結構的靜態特性之后,對其動態特性進行研究。
為了得到尾支撐結構的動力學特性,首先采用蘭喬斯法對其進行模態分析,模態分析是結構動態分析中的一種有效分析方法[10-11]。蘭喬斯法是一種將對稱矩陣通過正交相似變換為三對角矩陣的算法,廣泛應用于結構動力學方程的求解中。
計算得到的模態頻率范圍為74.163~930.82 Hz,前 八 階 的 模 態 頻 率 為 74.163 Hz、76.251 Hz、239.95 Hz、240.62 Hz、576.65 Hz、580.74 Hz、879.25 Hz、930.82 Hz,前兩階模態振型為繞Y軸一階彎曲,如圖6所示。
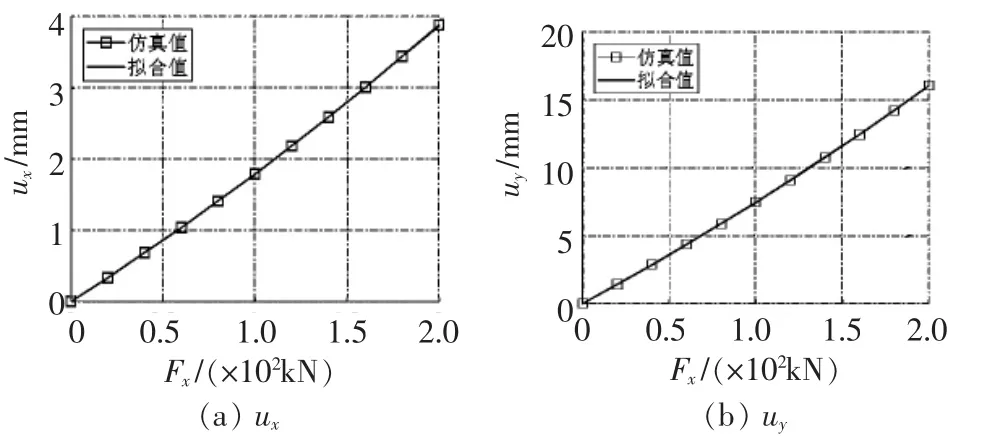
▲圖3 Fx與 ux、uy關系曲線
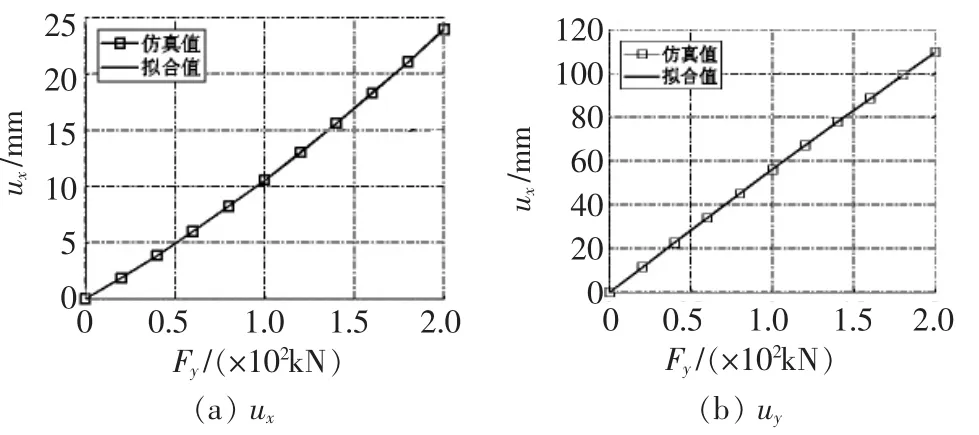
▲圖4 Fy與 ux、uy關系曲線
▲圖5 Fz與 ux、uz關系曲線
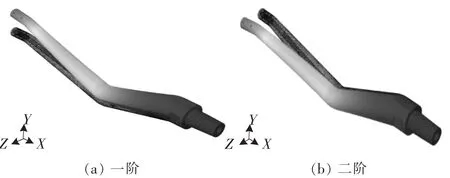
▲圖6 前兩階模態振型
由模態分析可知,所設計的尾支撐結構的前兩階模態頻率(74.163 Hz和76.251 Hz)遠大于其它支撐結構的前一階模態頻率(31.1 Hz),三階模態頻率(239.95 Hz)大于其它支撐結構的二階模態頻率(120.9 Hz)[12]。
在分析了尾支撐結構的模態后,對其受沖擊響應進行分析。
沖擊載荷是進行風洞試驗時最為惡劣的一種載荷,對沖擊載荷衰減的快慢反映了支桿快速穩定能力的強弱。瑞利阻尼因數α=0.2、β=0.000 9,當三個方向分別受到幅值為20 000 N、脈寬為0.01 s的沖擊載荷時,尾支撐結構模型安裝端的位移時間響應曲線如圖7所示。
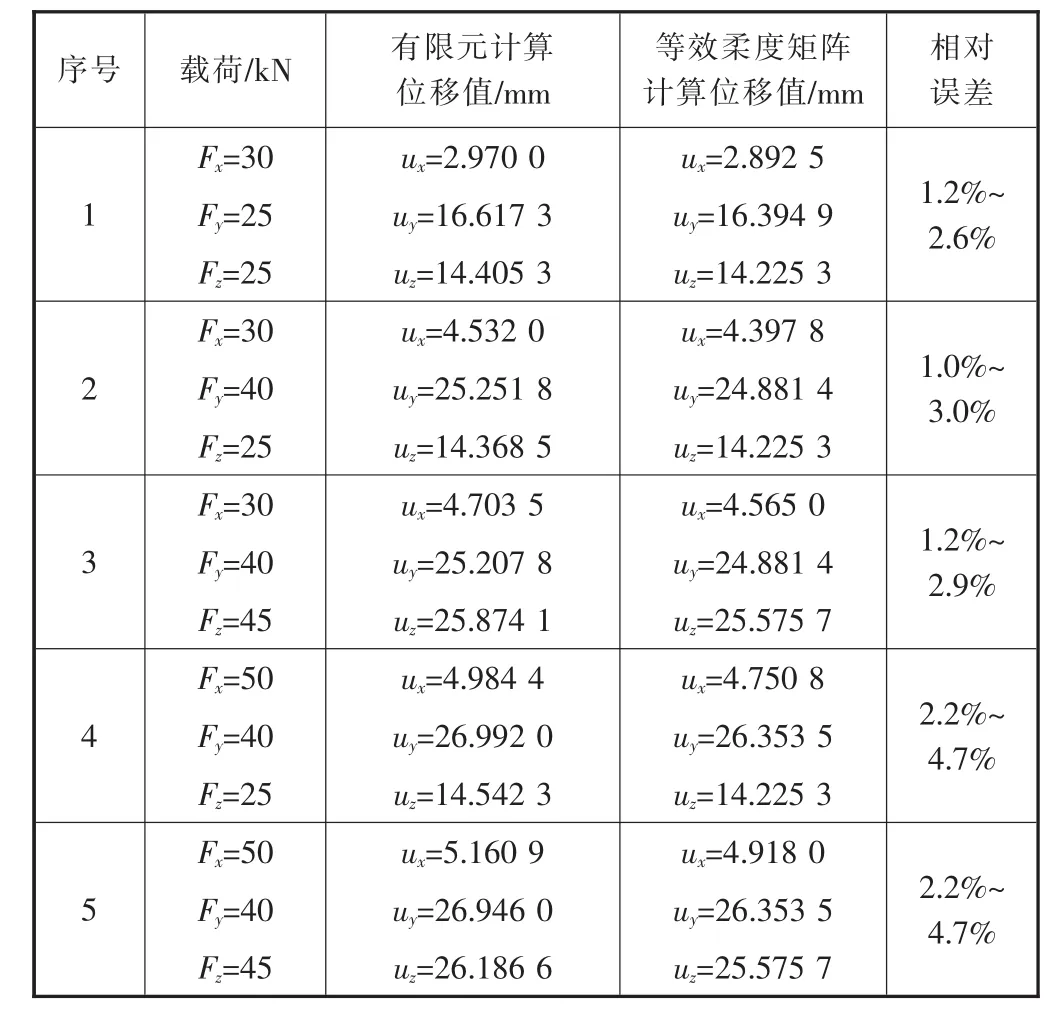
表2 復合載荷驗證結果
由圖7可知,X軸方向的位移響應遠遠小于Y軸和Z軸方向的位移響應,且X軸方向恢復穩定的時間遠遠短于其它兩個方向,即X軸方向的剛度和阻尼比Y軸和Z軸方向的大。在0.02 s之后,三個方向的位移均衰減到5 mm以內,滿足風洞試驗的要求,可見尾支撐結構能夠給風洞試驗模型提供一個較為穩定的試驗支撐平臺。
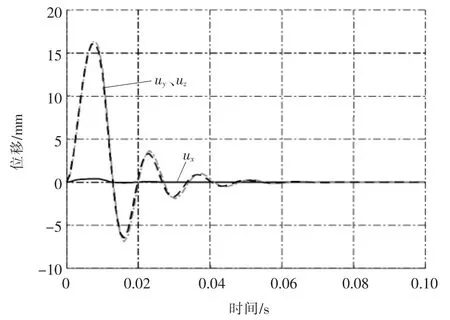
▲圖7 沖擊載荷時位移時間響應曲線
3 結論
筆者針對2.4 m×2.4 m跨超聲速風洞試驗,設計了飛行器跨超聲速風洞試驗模型的尾支撐結構,得到了尾支撐結構的等效柔度矩陣,分析了尾支撐結構的靜力學和動力學特性。
分析結果表明,所設計的尾支撐結構具有較高的靜態剛度和良好的動力學穩定性,滿足風洞試驗的結構要求。所建立的等效柔度矩陣能較好地描述尾支撐結構的總體柔度特性,等效柔度矩陣計算結果與有限元計算結果最大相對誤差在5%以內,滿足工程應用的要求。在20 000 N沖擊載荷作用下,三個方向的位移穩定到5 mm以內的時間均短于0.02 s,尾支撐結構能夠給風洞試驗模型提供一個較為穩定的試驗支撐平臺。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
