陣風擾動下大柔性飛行器姿態(tài)跟蹤控制設計
2018-10-09 03:00:16呂蓉蓉徐亮薛辰陸宇平
電子設計工程 2018年18期
呂蓉蓉,徐亮,薛辰,陸宇平
(南京航空航天大學自動化學院,江蘇南京211100)
隨著機載傳感器和通信包近幾年的迅猛發(fā)展,對能在空中長時間停留的飛行器平臺的需求越來越大。大柔性飛行器可帶來更好執(zhí)行任務的能力,體現(xiàn)在更長的巡航時間、承受更重的負載、需要更好的氣動性能等。能夠執(zhí)行軍事上的偵察、收集情報等任務以及民用范圍內(nèi)的網(wǎng)絡中繼、氣象信息采集。
Shearer和Cesnik[1-4]研究了大柔性飛行器非線性動力學和控制問題。研究提出了一種雙閉環(huán)控制結構來控制簡化版大柔性飛行器模型的軌跡。Gibson,Annaswamy 和 Lavretsky[5-6]將 線 性 LQR/LTR控制器與自適應LQR/LTR控制器對大柔性飛行器的穩(wěn)定作用作了比較。Che,Gregory和Cao[7-8]提出了一個LQR控制器增廣L1自適應輸出反饋控制器的控制方案。
本文針對陣風擾動下具有不確定性的大柔性飛行器設計基于LQR的模型參考自適應控制器來跟蹤其俯仰角指令。
1 大柔性飛行器模型描述
本文具體的研究對象是飛翼式柔性飛機,幾何模型如圖1所示。此飛翼式柔性飛機的機翼全展長有72.8 m,半弦長為2.44 m,距柔性機翼兩端六分之一全翼展長處具有10°的上反角,并安置5個發(fā)動機,平均等距離坐落在翼展上。還有3個吊艙,分別位于中心和距兩端六分之一展長處。飛機中心處的吊艙重約27.23 kg,可承受的有效載荷范圍為0~227 kg,227 kg是其滿載時的重量;兩邊的吊艙重約22.70 kg。機翼截面的慣性、彈性和氣動特性參數(shù)如表1所示[9]。本文所用的模型是在空間柔性懸臂梁的非線性結構變形基礎上,結合定常氣動力模型,運用有限元法進行離散,導出其動能、勢能及合外力對應的廣義力,然后基于Lagrange方法推導出的大柔性飛行器非線性氣彈與飛行動力學模型:
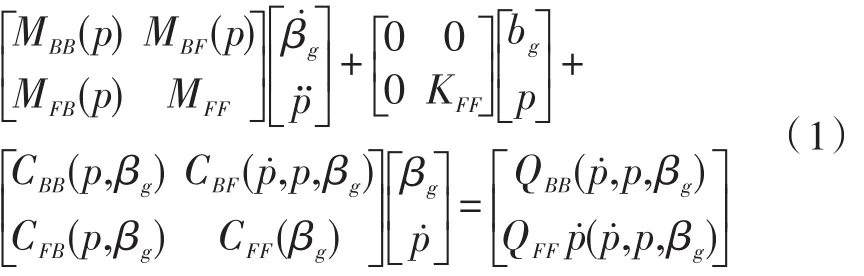
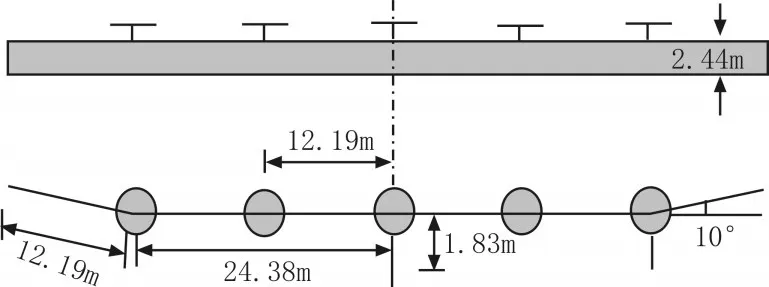
圖1 飛翼式柔性飛機幾何模型
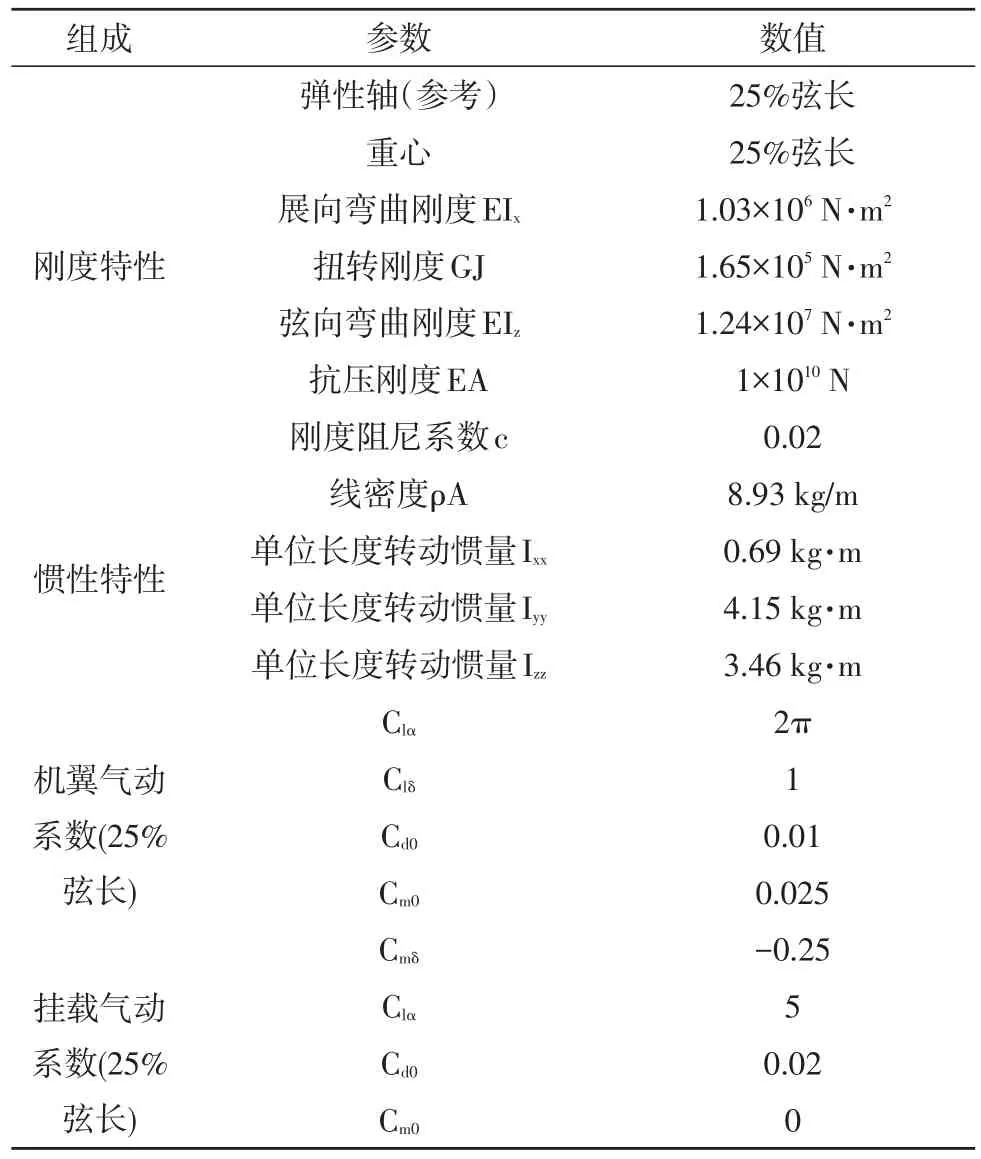
表1 飛翼式柔性飛機相關參數(shù)
2 大柔性飛行器模型簡化
2.1 線性化
為了方便后續(xù)大柔性飛行器控制系統(tǒng)的設計,需要將非線性的模型轉化為線性模型。本節(jié)采用傳統(tǒng)近似線性化方法[10],在配平求得的平衡點附近進行雅可比[11]線性化,可得到線性化系統(tǒng)形式如下:

經(jīng)計算,該線性系統(tǒng)可控可觀并且穩(wěn)定。
2.2 模型降階
1981年,Moore[12]提出了系統(tǒng)內(nèi)平衡實現(xiàn)理論,是從可控可觀性的角度對漸進穩(wěn)定系統(tǒng)一種平衡降階方法。其主要思想為,將系統(tǒng)分為強子系統(tǒng)和弱子系統(tǒng),對部分弱可控可觀的狀態(tài)量進行忽略,對原模型的輸入輸出特性不會造成影響。這種方法的缺點是計算量特別大,但是是最常用的降階方法之一。
考慮如式所示的線性系統(tǒng),定義其可控性Gram矩陣Wc、可觀性Gram矩陣Wo分別為:
由線性時不變系統(tǒng)完全可控可觀的判據(jù)可得,當且僅當Gram矩陣Wc正定,系統(tǒng)完全可控;當且僅當Gram矩陣Wo正定,系統(tǒng)完全可觀[13]。同時可以得出,Wc、Wo是以下Lyapunov方程的解:
并且,若A是漸近穩(wěn)定的,則Wc、Wo是其(4)唯一的對稱解。
對于線性系統(tǒng)(2)而言,倘若存在非奇異變換矩陣T,能將原系統(tǒng)轉化為其等價系統(tǒng),其中,該系統(tǒng)對應的可控性 Gram 矩陣、可觀性 Gram矩陣都是相等的對角陣,即:
則稱該變換T為平衡變換,原系統(tǒng)的平衡系統(tǒng),也稱為平衡實現(xiàn)[14]。并有為系統(tǒng)的Hankel陣奇異值。
平衡截斷降階法的主要思路是舍棄小于σr的Hankel矩陣奇異值所對應的狀態(tài)分量,則會得到輸入輸出特性基本沒有改變的平衡截斷降階系統(tǒng)模型該方法的缺點是與原系統(tǒng)的穩(wěn)態(tài)增益有偏差,優(yōu)點是能在頻率范圍內(nèi)與原系統(tǒng)近似。
3 基于LQR的模型參考自適應控制器設計
3.1 線性二次型(LQR)控制器設計
因為本文要設計的是基于線性二次型(LQR)控制器的模型參考自適應控制器,所以在此之前先設計適用于飛機縱向控制的LQR控制器[15]。LQR控制器是根據(jù)被控系統(tǒng)的狀態(tài)量以及輸入量的二次積分型函數(shù)來制定一個評價函數(shù)作為衡量系統(tǒng)性能的指標,使得該評價函數(shù)達到最小值,從而獲得系統(tǒng)的狀態(tài)反饋矩陣。
考慮系統(tǒng)(2),系統(tǒng)性能指標的評價函數(shù)為:

其中,z為被控系統(tǒng)輸出,zcmd為參考輸出,誤差e=z-zcmd。Q、R均為正定的權重矩陣。LQR控制器的設計目標是使得最優(yōu)控制輸入ubl之后系統(tǒng)的輸出能夠跟蹤參考輸出,并能使得系統(tǒng)性能指標的評價函數(shù)最小。Q和R矩陣一般通過試湊法得出,Q選取得越大則要求系統(tǒng)的誤差越小,R越大則要求系統(tǒng)的控制能量消耗越小,兩者之間相互制衡,通過選取合適的Q和R矩陣,可以使誤差與控制輸入達到平衡的狀態(tài)。
加入姿態(tài)跟蹤的誤差積分:

增廣系統(tǒng)(2),得:
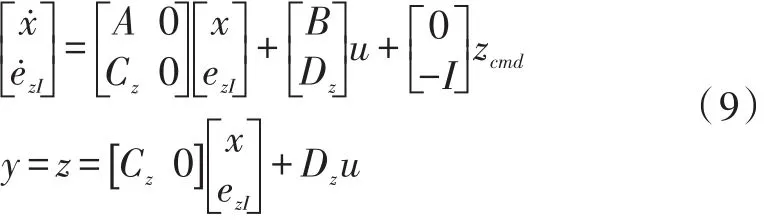
寫為:

則增廣系統(tǒng)性能指標的評價函數(shù)為:

最優(yōu)控制輸入為:

正定矩陣P滿足Riccati方程:

3.2 基于LQR的模型參考自適應控制器設計
在系統(tǒng)(2)中加入不確定性[16-18]:

其中,u∈Rm表示系統(tǒng)的控制輸入,x∈Rn是系統(tǒng)的狀態(tài)量,Λ表示系統(tǒng)控制通道異常,為取值0到1之間的未知對角陣(0代表損壞,1代表完好)。f(x)=ΘTΦ(x)是非線性參數(shù)匹配不確定性,并且基于狀態(tài)量。Φ(x)∈RN是連續(xù)的局部回歸矢量,Θ∈RN×m是未知的常參矩陣。
將誤差加入增廣系統(tǒng)(15),可得:

則輸出為:
對于參考模型的構建,可以使用上一節(jié)設計LQR控制器得到的狀態(tài)反饋矩陣KT,該構建參考模型的方法在飛行器的姿態(tài)跟蹤的自適應控制方法中應用廣泛。描述參考模型為:

最終基于LQR控制器的模型參考自適應控制器的輸入為:

將式帶入增廣系統(tǒng)(16),可得:

狀態(tài)向量的跟蹤誤差為:

令控制器跟蹤誤差為零,則控制器輸入為:

將此控制輸入(22)代入增廣系統(tǒng)(20):

狀態(tài)誤差的導數(shù)記為:

對于系統(tǒng)(22),使其漸進穩(wěn)定的控制律為:

其中,自適應控制是(21),控制輸入是(18),Γ,Pm是正定對稱矩陣,同時Pm滿足:

其中,Qm是正定矩陣。
自適應控制律中Γ為:

自適應律分解為:
模型參考自適應控制器的最終控制輸入為:

4 仿真分析
本節(jié)對Von karman紊流下的大柔性飛行器進行俯仰角跟蹤。考慮不確定性,令Λ=0.7I,Φ(x)=x。初始時刻是飛行器的平衡狀態(tài)下。跟蹤目標zcmd在0~10 s時為 10°,10~20 s時變?yōu)?-10°,20 s后歸零,仿真時間為30 s。
LQR控制器參數(shù):Q=0.05I,Q(81,81)=107,R=I。
自適應增益為:Γu=10-3I,ΓΘ=10-3I。
陣風下的仿真結果如圖2-4。
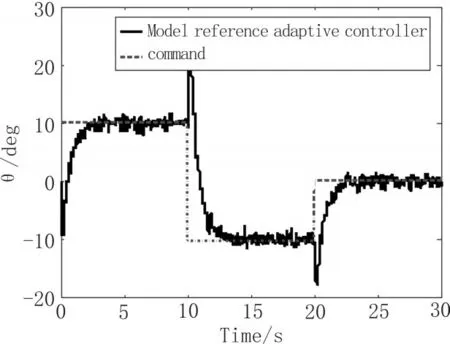
圖2 陣風擾動下模型參考自適應控制器作用的俯仰角輸出跟蹤曲線
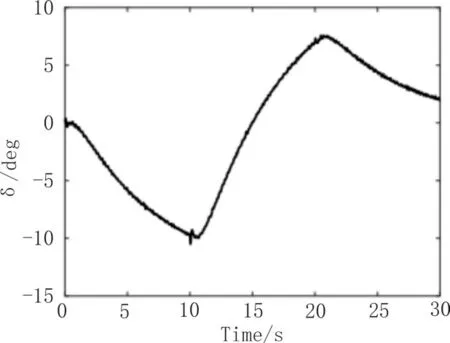
圖3 陣風擾動下模型參考自適應控制器作用的操縱舵面偏角
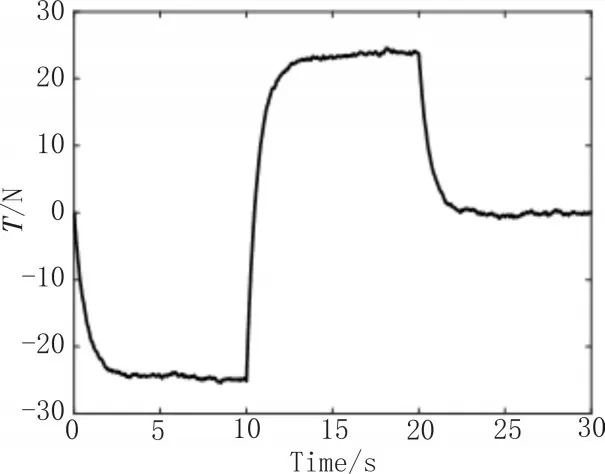
圖4 陣風擾動下模型參考自適應控制器作用的操縱舵面和發(fā)動機的控制輸入
從圖2仿真結果可以看出,即使在有陣風的擾動下,模型參考自適應控制器依然能良好地跟蹤俯仰角。盡管在指令變化時,飛行器由于慣性作用出現(xiàn)了超調(diào),但是反應時間很短,迅速地跟蹤到-10°的俯仰角。
從圖3、4看出,舵面上偏,產(chǎn)生正的俯仰力矩,即俯仰角增大;根據(jù)牛頓第三定律,發(fā)動機產(chǎn)生反方向的推力,使飛行器產(chǎn)生抬頭力矩,增大俯仰角。
5 結論
文中針對大柔性飛行器設計了一種基于LQR控制器的模型參考自適應控制器。首先,由于大柔性飛行器是一種強耦合的非線性模型,為了后續(xù)設計控制器,需要將其轉化為線性系統(tǒng)。接著,由于大柔性飛行器建模時為了體現(xiàn)“柔性”而采用了有限元的思想,造成其狀態(tài)空間的維數(shù)過高,給控制器的設計帶來困難,所以選取平衡截斷法進行模型的降階。然后在控制器的設計中,先設計LQR控制器,再在此基礎上加入了模型參考自適應控制律,仿真結果顯示,即使在陣風的擾動下,其依然具有良好的姿態(tài)跟蹤控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16