基于著色Petri網(wǎng)的下一代列控系統(tǒng)虛擬閉塞技術(shù)仿真分析研究
2018-10-09 03:32:48開祥寶楊霓霏宋志丹柴金川
鐵路計算機應(yīng)用 2018年9期
王 琳,開祥寶,楊霓霏,宋志丹,柴金川
(1.中國鐵道科學(xué)研究院集團有限公司 通信信號研究所,北京 100081;2.國家鐵路智能運輸系統(tǒng)工程技術(shù)研究中心,北京 100081;3.中國鐵道科學(xué)研究院集團有限公司 國家鐵道試驗中心,北京 100081)
隨著我國列控系統(tǒng)的快速發(fā)展,采用衛(wèi)星定位技術(shù)的下一代列控系統(tǒng)將是我國信號控制系統(tǒng)的重點研究方向。在下一代列控系統(tǒng)中,采用衛(wèi)星定位技術(shù)實現(xiàn)列車的連續(xù)精確定位為實現(xiàn)虛擬閉塞技術(shù)提供了技術(shù)支持。虛擬閉塞技術(shù)的實現(xiàn),對于高海拔、環(huán)境惡劣、日常維修維護工作困難的西部鐵路具有重要意義。本文主要內(nèi)容是:(1)介紹下一代列控系統(tǒng)的系統(tǒng)定義及系統(tǒng)構(gòu)成;(2)針對下一代列控系統(tǒng)的結(jié)構(gòu)特征,對其虛擬閉塞技術(shù)進行研究;(3)采用著色Petri網(wǎng)對虛擬閉塞技術(shù)的實現(xiàn)進行建模仿真分析。
1 下一代列控系統(tǒng)
1.1 系統(tǒng)定義
根據(jù)2004年頒布的《中國列車運行控制系統(tǒng)CTCS技術(shù)規(guī)范總則》,對CTCS-4級列控系統(tǒng)進行了如下描述:
(1)完全基于無線通信(如GSM-R)的列車運行控制系統(tǒng);
(2)列車可按虛擬閉塞或移動閉塞方式運行,由地面RBC和車載設(shè)備完成列車占用檢查和列車完整性檢測;
(3)線路上安裝點式設(shè)備,主要為列車提供用于測距修正的定位基準信息;
(4)無線通信系統(tǒng)實現(xiàn)地面-列車間連續(xù)、雙向的信息傳輸;
(5)可采用目標(biāo)距離模式控制;
(6)由地面RBC生成行車許可,通過無線通信系統(tǒng)傳送到列車上。其它與列車運行控制系統(tǒng)有關(guān)的信息也通過無線通信系統(tǒng)傳輸;
(7)車載設(shè)備為主體信號,可取消地面信號。
根據(jù)CTCS-4級列控系統(tǒng)的特點,結(jié)合既有CTCS-3級列控系統(tǒng)的成熟技術(shù),下一代列控系統(tǒng)可有如下定義:下一代列控系統(tǒng)是基于無線通信及衛(wèi)星導(dǎo)航技術(shù)的列車運行控制系統(tǒng)。該系統(tǒng)采用衛(wèi)星定位融合車輪速度傳感器、慣性導(dǎo)航等技術(shù)實現(xiàn)列車的綜合定位。通過無線通信網(wǎng)絡(luò)實現(xiàn)車地間信息交互,以此完成列車位置、行車許可等信息的傳輸。列車以連續(xù)一次性速度距離控制曲線運行,可實現(xiàn)虛擬閉塞或移動閉塞追蹤。
1.2 系統(tǒng)結(jié)構(gòu)方案
繼承于CTCS技術(shù)體系,下一代列控系統(tǒng)整體由3部分構(gòu)成,分別為:地面子系統(tǒng)、車載子系統(tǒng)及無線通信子系統(tǒng),系統(tǒng)結(jié)構(gòu)如圖1所示。
1.2.1 地面子系統(tǒng)
在下一代列控系統(tǒng)中,考慮地面設(shè)備虛擬化、軌旁設(shè)備稀疏化的需求,區(qū)間不再設(shè)置軌道電路。地面子系統(tǒng)主要由計算機聯(lián)鎖系統(tǒng)(CBI)、無線閉塞中心(RBC)、軌旁數(shù)據(jù)存儲單元(DSU)、地面定位單元等構(gòu)成。
其中,CBI除完成車站聯(lián)鎖功能外,還新增有區(qū)間方向控制,與RBC新增信息交互等功能;對于RBC,除向車載提供移動授權(quán)、線路基礎(chǔ)數(shù)據(jù)等信息外,還與列車定位裝置共同完成列車在區(qū)間的占用、出清與虛擬閉塞功能;DSU設(shè)備主要完成電子地圖數(shù)據(jù)的存儲與上傳等功能。
1.2.2 車載子系統(tǒng)
車載子系統(tǒng)由車載安全計算機、無線通信單元、軌道電路信息接收單元、應(yīng)答器信息接收模塊、車載記錄單元、列車接口單元、人機界面等設(shè)備組成。新增有列車定位單元(LPU)及衛(wèi)星定位天線以完成列車的精確定位。其中,LPU具有以下功能:
(1)存儲電子地圖數(shù)據(jù),接收衛(wèi)星定位、差分基站信息,接收車載發(fā)送的測速測距信息與實體應(yīng)答器信息,根據(jù)接收到的信息進行融合濾波計算,以此確定列車當(dāng)前位置與速度并將以上信息發(fā)送至車載;
(2)當(dāng)列車運行位置通過電子地圖中的虛擬應(yīng)答器時,LPU將向車載設(shè)備發(fā)送虛擬應(yīng)答器報文信息;
(3)列車通過道岔時,LPU將接收道岔位置表示信息。根據(jù)車站的地理數(shù)據(jù)信息完成對列車位置的精確定位,同時根據(jù)道岔位置信息確定列車走向。
2 虛擬閉塞技術(shù)
所謂虛擬閉塞即將區(qū)間線路劃分為若干虛擬閉塞分區(qū),與傳統(tǒng)固定自動閉塞制式不同,地面不再使用實際的軌道占用檢測設(shè)備,而是采用邏輯區(qū)段的方式對區(qū)間進行劃分。追蹤列車位置,實現(xiàn)列車的占用檢查是實現(xiàn)虛擬閉塞技術(shù)的難點。此外,當(dāng)列車與地面失去通信,出現(xiàn)丟失列車位置的故障情況,如何確保列車在區(qū)間的安全運行成為又一問題。
在下一代列控系統(tǒng)中,由基于衛(wèi)星定位的綜合定位技術(shù)實現(xiàn)列車的精確定位。列車在運行過程中,通過相應(yīng)定位單元確定自身位置并將位置報告發(fā)送至RBC,RBC通過內(nèi)部查詢,確定列車占用的虛擬閉塞分區(qū),以此追蹤列車的運行。由此可以看出,RBC設(shè)備、車載設(shè)備以及相關(guān)的定位系統(tǒng)是實現(xiàn)虛擬閉塞技術(shù)的核心設(shè)備。其中,列車在虛擬區(qū)段的占用檢查、列車在區(qū)間運行的安全防護主要由RBC設(shè)備完成。
RBC對虛擬閉塞技術(shù)的實現(xiàn)主要分為3部分:(1)RBC上電啟動,確定區(qū)間列車位置;
(2)列車于區(qū)間運行,RBC完成運行列車在虛擬閉塞分區(qū)的占用檢查;
(3)車地通信故障,列車位置丟失時,RBC對列車在區(qū)間運行的安全防護。
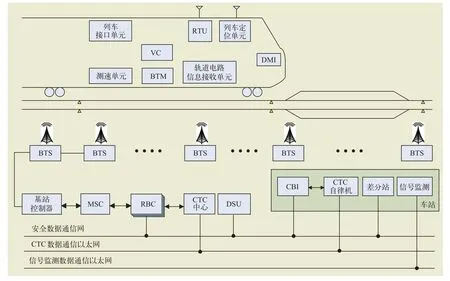
圖1 下一代列控系統(tǒng)結(jié)構(gòu)示意圖
2.1 RBC上電啟動,確定區(qū)間列車位置
在下一代列控系統(tǒng)中,地面設(shè)備RBC將在上電啟動后,將管轄范圍內(nèi)所有虛擬閉塞分區(qū)設(shè)置為邏輯占用狀態(tài)。當(dāng)RBC與CBI建立通信連接后,RBC將根據(jù)獲取的CBI相關(guān)信息,分別進行如下處理:
(1)若CBI根據(jù)區(qū)間計軸設(shè)備信息確認區(qū)間空閑時,RBC將自動確認管轄范圍內(nèi)區(qū)間所有虛擬閉塞分區(qū)為空閑狀態(tài);
(2)若CBI根據(jù)區(qū)間計軸設(shè)備信息確認區(qū)間有車占用時,將由調(diào)度人員對區(qū)間列車位置進行確認,無列車占用的虛擬閉塞分區(qū)將由人工解鎖。
2.2 列車在虛擬閉塞分區(qū)的占用檢查
RBC對進入?yún)^(qū)間的列車進行追蹤定位,當(dāng)列車頭部進入虛擬閉塞分區(qū)時,RBC將設(shè)置該虛擬閉塞分區(qū)狀態(tài)為報告車占用。當(dāng)RBC判斷列車尾部出清虛擬閉塞分區(qū)后,該虛擬閉塞分區(qū)將被RBC設(shè)置為空閑。
RBC在接收到列車位置報告后,根據(jù)列車車長及車載設(shè)備測距估計誤差等信息判斷虛擬閉塞分區(qū)占用、出清狀態(tài)。如圖2所示,列車安全估計位置由列車車長與測距誤差構(gòu)成。當(dāng)列車車頭最大估計前端占用虛擬閉塞分區(qū),盡管列車實際車頭位置未到達虛擬閉塞分區(qū)入口,RBC仍設(shè)置該虛擬閉塞分區(qū)為占用狀態(tài)。
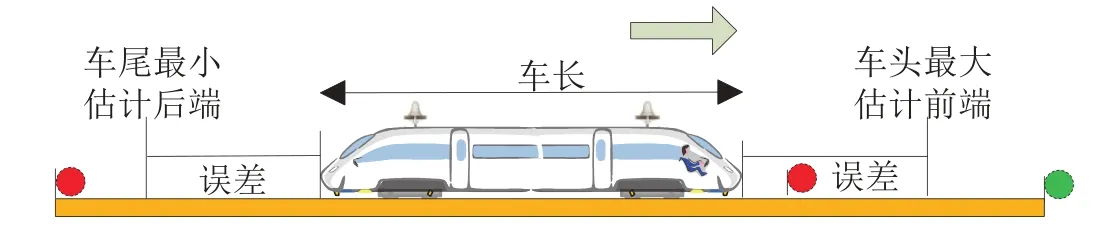
圖2 列車占用虛擬閉塞分區(qū)
同樣,RBC會根據(jù)列車車尾最小估計后端判斷列車是否出清虛擬閉塞分區(qū)。當(dāng)列車車尾最小估計后端未出清虛擬閉塞分區(qū),盡管列車實際車尾位置已出清該虛擬閉塞分區(qū),RBC仍設(shè)置該虛擬閉塞分區(qū)為報告車占用狀態(tài)。只有當(dāng)列車車尾最小估計后端出清該虛擬閉塞分區(qū)后,該虛擬閉塞分區(qū)狀態(tài)才視為出清。如圖3所示。
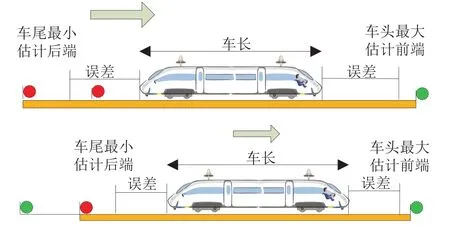
圖3 列車出清虛擬閉塞分區(qū)
RBC對虛擬閉塞分區(qū)狀態(tài)的判斷處理是在列車完整性檢查正常的條件下進行的。當(dāng)車載設(shè)備判斷列車完整性檢查失敗后,會采用最大常用制動停車。后續(xù)將按照非正常方式行車,確保列車安全運行。
2.3 車地通信故障時列車的安全防護
RBC通過虛擬方式對其內(nèi)部存儲的區(qū)間線路數(shù)據(jù)進行劃分,通過列車的位置報告,判斷虛擬閉塞分區(qū)的占用、出清狀態(tài)以此實現(xiàn)列車的虛擬閉塞運行。但是,當(dāng)列車在運行過程中發(fā)生車地通信故障時,區(qū)間軌道電路的缺失將使得RBC無法對丟失列車進行精確定位,丟失列車將成為區(qū)間線路的安全隱患。RBC將無法為后續(xù)正常運行于區(qū)間的列車計算行車許可。因此,在下一代列控系統(tǒng)中,應(yīng)充分考慮區(qū)間、站內(nèi)車地失去通信的故障情況,并給予相應(yīng)的安全防護。
2.3.1 車地在區(qū)間失去通信
當(dāng)兩列車在區(qū)間正常運行時,前行列車突然與RBC失去通信連接,丟失車輛成為區(qū)間的幽靈車,RBC將無法判斷丟失車輛的具體位置。針對上述故障情況,RBC將對區(qū)間虛擬閉塞分區(qū)增加封鎖功能。
當(dāng)前車失去通信連接后,RBC將從該列車丟失位置開始,進行虛擬閉塞分區(qū)封鎖設(shè)置。
(1)單車區(qū)間運行
當(dāng)丟失車所在位置至前方車站的進站信號機前無其他列車運行,RBC對區(qū)間虛擬閉塞分區(qū)的封鎖設(shè)置將從丟失位置開始,延續(xù)至前方車站的進站信號機所在區(qū)段的邊界入口處。
(2)多車區(qū)間運行
當(dāng)丟失車位置前方有注冊列車運行,RBC對區(qū)間虛擬閉塞分區(qū)的封鎖操作將設(shè)置至前方運行車輛所在的虛擬閉塞分區(qū)邊界入口處。如圖4所示。被封鎖的虛擬閉塞分區(qū)狀態(tài)顯示為“非報告車占用”。
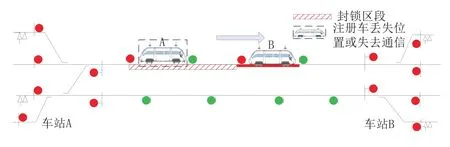
圖4 多車運行區(qū)間,車地失去通信
當(dāng)注冊列車與地面失去通信連接后,ATP車載設(shè)備將實施常用制動停車。丟失車輛將憑借調(diào)度命令在區(qū)間運行,直至丟失車進入下一車站內(nèi)停車。若在此期間車地通信仍無法恢復(fù)連接,丟失車可憑借調(diào)度命令在下一區(qū)間按照站間閉塞方式運行。
對于多輛列車在區(qū)間追蹤運行,中間列車與地面設(shè)備發(fā)生通信故障情況,RBC會立即將丟失列車所在的虛擬閉塞分區(qū)狀態(tài)設(shè)置為“非報告車占用”。被封鎖的虛擬閉塞分區(qū)數(shù)量會隨著前方正常注冊列車的不斷前行而不斷增加,以此確保后車的運行安全。
2.3.2 車地在車站失去通信
列車除在區(qū)間運行可能出現(xiàn)失去通信或丟失位置的故障情況,在站內(nèi)運行時,列車失去位置,也可能對區(qū)間造成安全隱患。以下分別對列車進、出站以及列車在站內(nèi)運行情況進行分析。
(1)列車進、出站
接車信號或發(fā)車信號正常開放,列車在進、出站過程中出現(xiàn)失去通信的故障情況,此時RBC根據(jù)列車丟失位置,對相應(yīng)虛擬閉塞分區(qū)進行封鎖設(shè)置。RBC封鎖設(shè)置的方式與區(qū)間一致,如圖5、圖6所示。
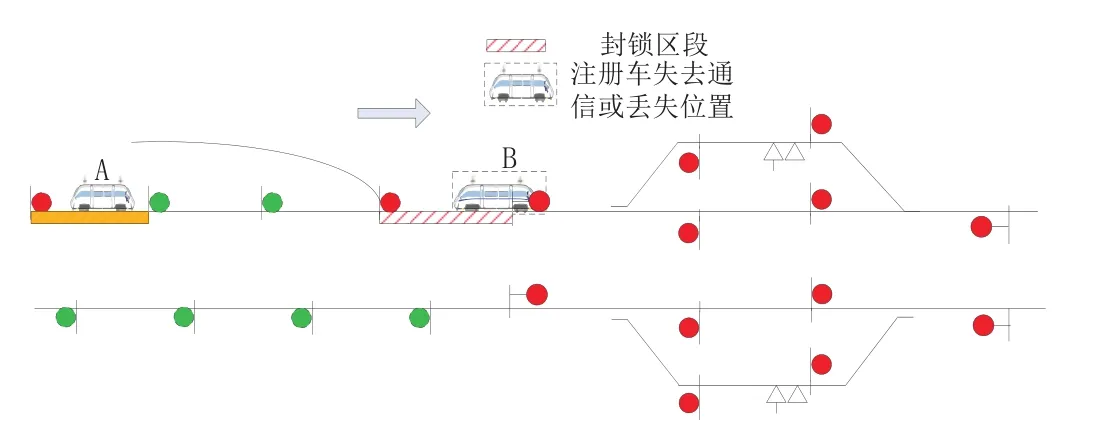
圖5 列車進站,車地失去通信
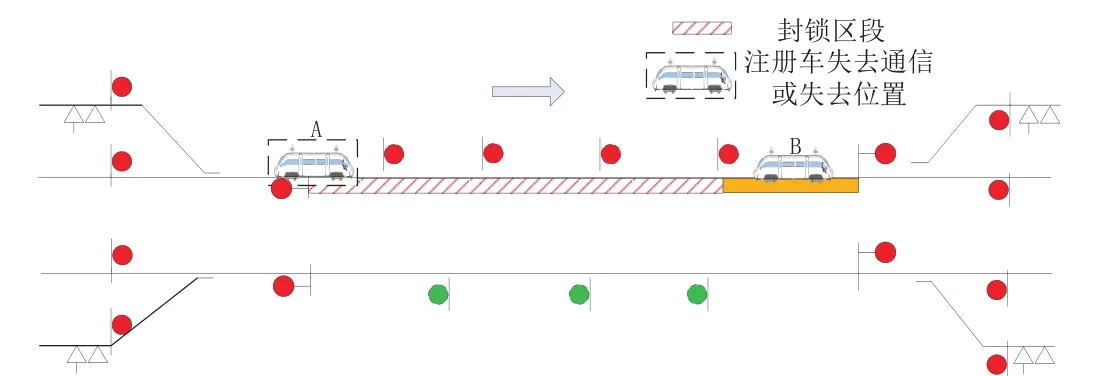
圖6 列車出站,車地失去通信
(2)列車位于站內(nèi)
當(dāng)列車在站內(nèi)運行出現(xiàn)丟失通信的故障情況,可能會出現(xiàn)以下兩種情況:
a. 列車在站內(nèi)股道運行,出現(xiàn)故障后,丟失車位置仍位于站內(nèi)。
注冊列車失去通信連接,ATP設(shè)備實施制動,丟失列車在停車后,列車位置仍位于站內(nèi),此時RBC不對區(qū)間虛擬閉塞分區(qū)進行封鎖設(shè)置。
b. 列車在站內(nèi)股道運行,出現(xiàn)故障情況后,丟失車向前運行進入?yún)^(qū)間。
對于第2種故障情況,丟失車在進入?yún)^(qū)間后會成為區(qū)間其他運行列車的安全隱患。針對此情況,RBC會從一離去區(qū)段開始對區(qū)間虛擬閉塞分區(qū)進行封鎖設(shè)置。封鎖情況將與區(qū)間相同,如圖7所示。
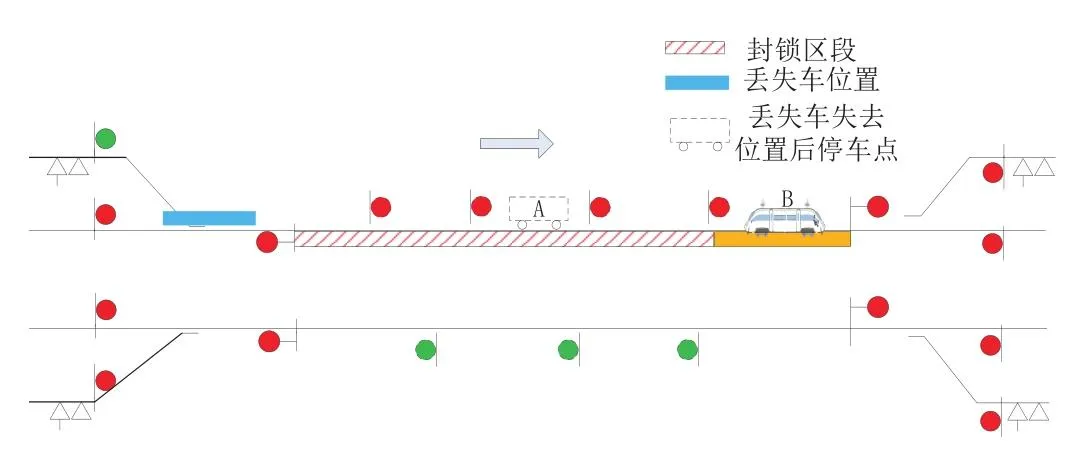
圖7 列車在站內(nèi)失去通信
RBC對相關(guān)虛擬閉塞分區(qū)設(shè)置封鎖后,丟失車可憑借調(diào)度命令進入下一車站,對于區(qū)間虛擬閉塞分區(qū)封鎖的解除可分以下情況:
(1)當(dāng)區(qū)間只有一輛列車運行,且該車失去通信,丟失車進入下一車站后,區(qū)間計軸設(shè)備向RBC報告區(qū)間空閑,此時RBC可自動清除對區(qū)間虛擬閉塞分區(qū)的封鎖設(shè)置;
(2)當(dāng)區(qū)間線路中有多輛列車運行,丟失車輛憑借調(diào)度命令進入下一車站后,調(diào)度人員將人工確認相關(guān)封鎖的虛擬閉塞分區(qū)是否空閑。當(dāng)調(diào)度人員確認虛擬閉塞分區(qū)無車占用后,在操作終端對處于空閑狀態(tài)的虛擬閉塞分區(qū)進行解鎖操作,后續(xù)注冊列車可繼續(xù)在區(qū)間運行。
以上兩種解鎖情況為車輛丟失通信連接后,無法恢復(fù)與地面設(shè)備連接的情況。若丟失車在失去位置后,與RBC的通信連接恢復(fù)且成功注冊RBC,則RBC會自動將相關(guān)虛擬閉塞分區(qū)解鎖。
3 基于著色Petri網(wǎng)的虛擬閉塞技術(shù)建模仿真分析
Petri網(wǎng)是一種適合用于描述系統(tǒng)異步、并發(fā)現(xiàn)象的系統(tǒng)模型[2]。 主要應(yīng)用于通信協(xié)議驗證、故障診斷、軟件工程設(shè)計、系統(tǒng)可靠性分析等領(lǐng)域。Petri網(wǎng)主要可分為基本Petri網(wǎng)與高級Petri網(wǎng)兩大類。在基本Petri網(wǎng)中,每個對象狀態(tài)或每種變化與事件均對應(yīng)一個庫所或變遷。這樣的一一對應(yīng)關(guān)系,使基本Perti網(wǎng)對個體描述較為詳細,造成系統(tǒng)節(jié)點過多、模型較為復(fù)雜的問題。針對基本Petri網(wǎng)的不足,有學(xué)者提出了著色Petri網(wǎng)的概念。著色Petri網(wǎng)定義如下:

在上式中,P表示庫所的有限集合,T表示變遷的有限集合,A表示有向弧有限集合; ∑代表顏色集,為有限的非空集合;N為節(jié)點函數(shù),是有向弧映射到P× T∪ T×P的函數(shù);C代表顏色函數(shù),每個庫所都可映射到相應(yīng)的顏色集;G定義為守衛(wèi)函數(shù),其為變遷的表達式函數(shù),值類型為布爾型,當(dāng)防衛(wèi)函數(shù)的值為真時,變遷才可觸發(fā),防衛(wèi)函數(shù)返回值為空,則默認為真;E為有向弧表達式函數(shù),該值應(yīng)屬于有向弧對應(yīng)庫所顏色集的多重集;I表示庫所映射到表達式的初始化函數(shù),且表達式的值應(yīng)屬于庫所顏色集上的多重集[2]。
CPN Tools是一款支持著色Petri網(wǎng)建模仿真的工具。該仿真軟件支持CPN ML語言,可對建立的模型進行語法檢測,確保建立模型的正確性。同時,CPN Tools能對所建模型的可達性、活性、有界性、家態(tài)性等屬性以及模型的狀態(tài)空間性能進行分析,以此確保所建模型邏輯的正確性并實現(xiàn)對模型的動態(tài)仿真[3]。
根據(jù)上述對虛擬閉塞技術(shù)的研究,以車地通信故障情況下,RBC對區(qū)間虛擬閉塞分區(qū)的封鎖設(shè)置為例,采用CPN Tools建模仿真工具,對該功能進行建模仿真驗證分析。
3.1 通信故障情況下虛擬閉塞分區(qū)封鎖設(shè)置模型
故障情況下,RBC對區(qū)間虛擬閉塞分區(qū)的封鎖設(shè)置共分為3個流程:
(1)跟蹤列車的運行位置。通過判斷列車最大安全前端與最小安全后端是否占用虛擬閉塞分區(qū),確定列車所在位置;
(2)保存列車位置并與上一周期進行比較,查看是否存在列車位置丟失的故障情況;
(3)若存在丟失列車,則對虛擬閉塞分區(qū)進行封鎖設(shè)置。
根據(jù)虛擬閉塞分區(qū)封鎖設(shè)置流程,采用層次化網(wǎng)絡(luò)完成封鎖功能的模型建立。層次化網(wǎng)絡(luò)類似于模塊化編程的思想,在廣義上定義所建模型網(wǎng)絡(luò)的整體框架,然后利用替代變遷將相關(guān)子網(wǎng)絡(luò)關(guān)聯(lián)至更詳細的頁面,從而對模型進行逐步細化,對封鎖功能頂層模型設(shè)計如圖8所示。在頂層模型中,RBC封鎖功能可細化為3個子網(wǎng)絡(luò),分別為“Trace train”、“Train miss”以及“Block section”,相應(yīng)的庫所及變遷說明如表1所示。

圖8 封鎖功能頂層模型

表1 頂層模型庫所及變遷說明
根據(jù)上述頂層模型,分別建立如下子模型。
(1)追蹤列車位置子模型
在追蹤列車位置子模型中,主要輸入列車車次號、列車最大安全前端及最小安全后端等參數(shù)。通過判斷列車頭尾在虛擬閉塞分區(qū)是否有偏移量,確定列車是否占用虛擬閉塞分區(qū)并在相應(yīng)的數(shù)據(jù)結(jié)構(gòu)記錄保存,具體模型如圖9所示。

圖9 追蹤列車位置子模型
(2)列車失蹤搜索子模型
在列車失蹤搜索子模型中,主要完成的是區(qū)間列車搜索任務(wù)。若區(qū)間運行列車為首次注冊,則RBC只對該注冊列車的車次號及車頭車尾位置進行保存。對于已經(jīng)在RBC存儲單元中保存位置的注冊列車,RBC將對比前后兩時刻注冊列車的位置,以此判斷注冊列車是否丟失。
若注冊列車在區(qū)間正常運行,則RBC存儲列車位置;若注冊列車在區(qū)間丟失通信后失去位置,則RBC將對上一時刻丟失車所處的虛擬區(qū)段進行標(biāo)記。所建模型如圖10所示。
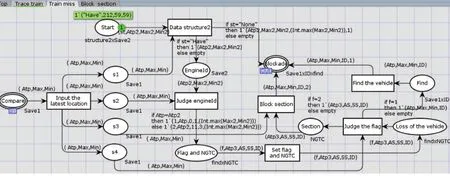
圖10 列車失蹤搜索子模型
(3)封鎖區(qū)段子模型
根據(jù)上述列車失蹤搜索子模型的搜索結(jié)果,封鎖區(qū)段子模型將對相關(guān)的區(qū)段進行狀態(tài)設(shè)置,完成自動封鎖。封鎖原則為:從丟失車上一時刻所在區(qū)段開始,依照列車運行方向進行搜索,直到遇到其它列車或車站進站信號機為止。 其模型,如圖11所示。
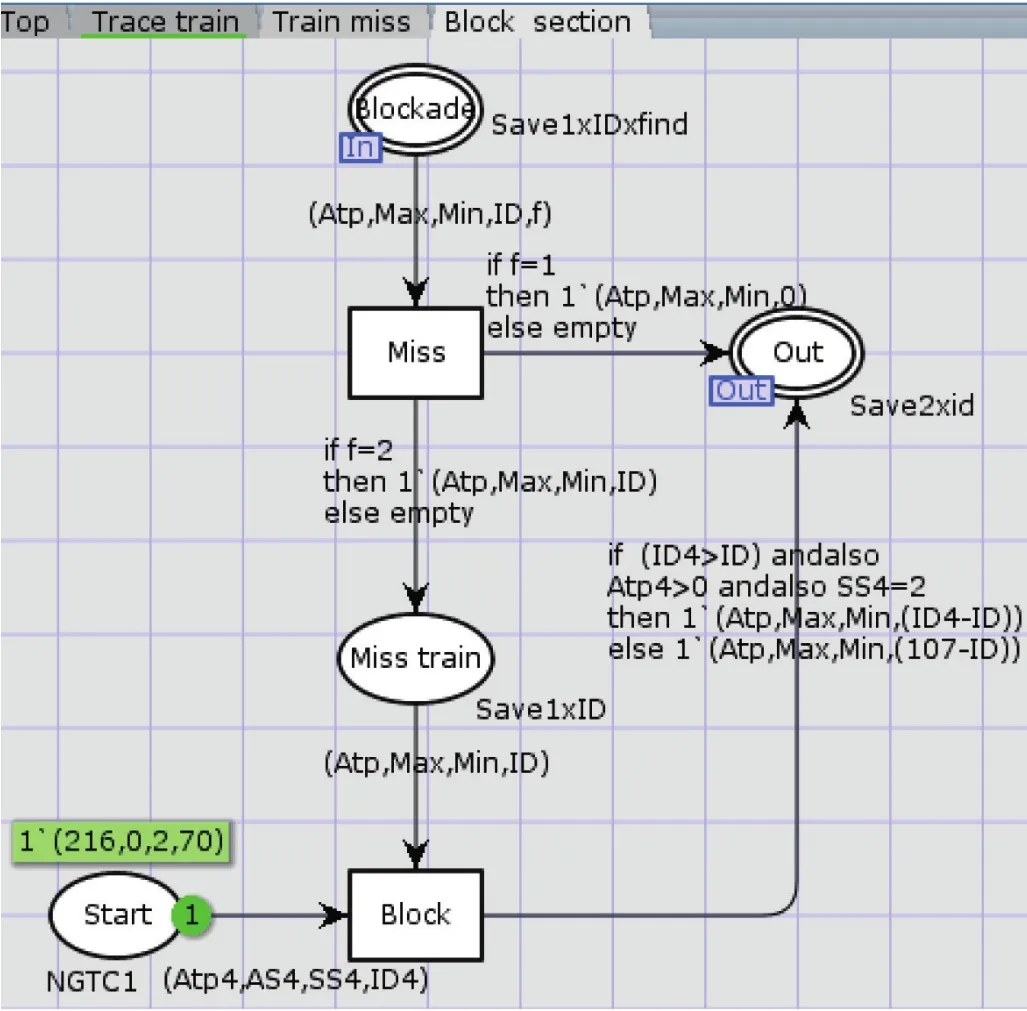
圖11 封鎖區(qū)段子模型
3.2 模型驗證分析
CPN Tools工具為用戶提供了模型的仿真與狀態(tài)分析等功能。用戶通過生成的可達圖與狀態(tài)空間報告判斷模型的相關(guān)功能可否實現(xiàn)以及模型的可達性、活性及家態(tài)性等特性是否滿足要求。為此,本節(jié)將對上述建立模型的相關(guān)功能特性進行驗證分析。
RBC自動封鎖功能中包含子網(wǎng)絡(luò)模型,對頂模型與子網(wǎng)絡(luò)模型分別設(shè)置如下初始托肯:
(1)“Top”父頁中,輸入初始托肯為 1`(1,211,1,1,57),表示當(dāng)前時刻211次列車最大安全前端與最小安全后端占用序號為57的虛擬閉塞分區(qū)。
(2)“Train Miss”子頁中,輸入初始托肯為1`(“Have”,212,59,59),表示上一時刻區(qū)間線路中212次列車占用59號虛擬區(qū)段。
(3)“Block Section”子頁中,輸入初始托肯為1`(216,0,2,70),表示當(dāng)前時刻216次列車占用70號虛擬區(qū)段。
上述設(shè)置的場景為多車運行,其中,212次列車為丟失列車,211次列車追蹤212次列車,212次列車追蹤216次列車。根據(jù)上述初始托肯設(shè)置,得出模型可達圖,如圖12所示。
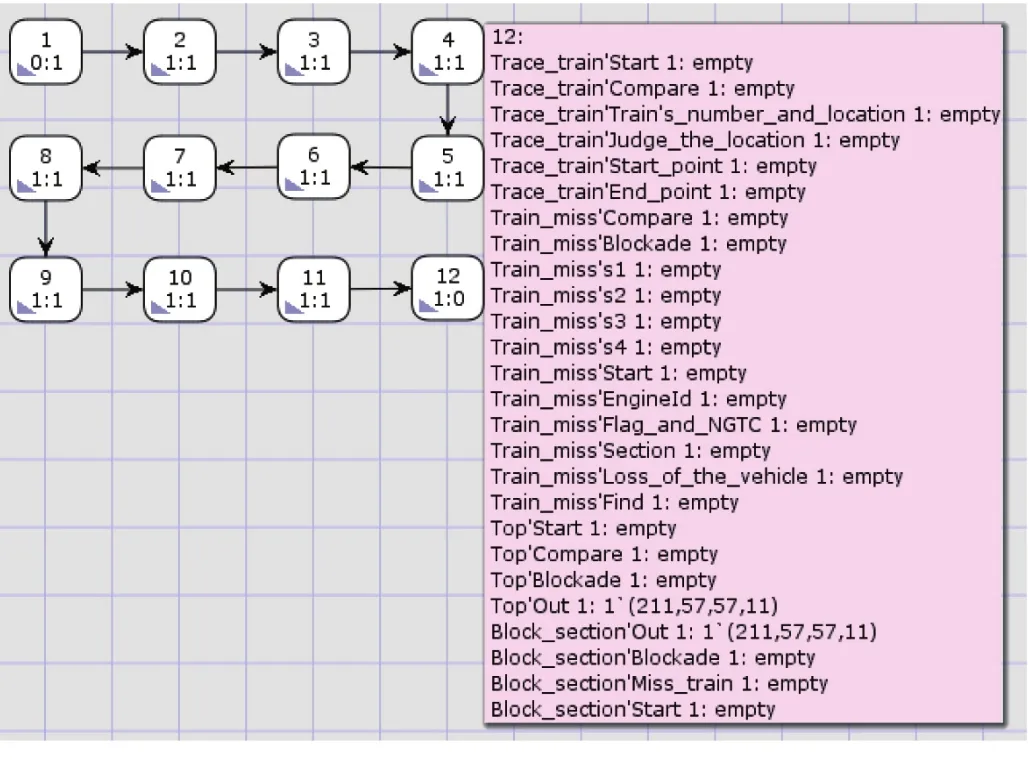
圖12 模型可達圖
對應(yīng)模型狀態(tài)空間分析報告如圖13所示。該模型具有有界性,節(jié)點12為死鎖標(biāo)志。在可達圖中,該節(jié)點對應(yīng)模型的輸出節(jié) 點,因此模型不具有死鎖性。同時,該模型存在3個死變遷,在上述初始條件下,3個死變遷均未被觸發(fā),因此滿足要求。
根據(jù)可達圖及狀態(tài)空間報告可以得出,模型中子網(wǎng)絡(luò)涉及的相關(guān)功能成功實現(xiàn),頂層模型的輸出結(jié)果滿足設(shè)計要求。
4 結(jié)束語
本文在下一代列控系統(tǒng)技術(shù)方案的基礎(chǔ)上,對其虛擬閉塞技術(shù)進行研究。分析了虛擬閉塞條件下,列車占用檢查功能的實現(xiàn)以及車地通信故障情況下,RBC設(shè)備對區(qū)間的安全防護。通過相關(guān)邏輯場景分析,利用CPN Tools工具對虛擬區(qū)段的封鎖設(shè)置進行仿真,根據(jù)得出的驗證分析結(jié)果,對模型進行修正,確保邏輯設(shè)計的正確性。
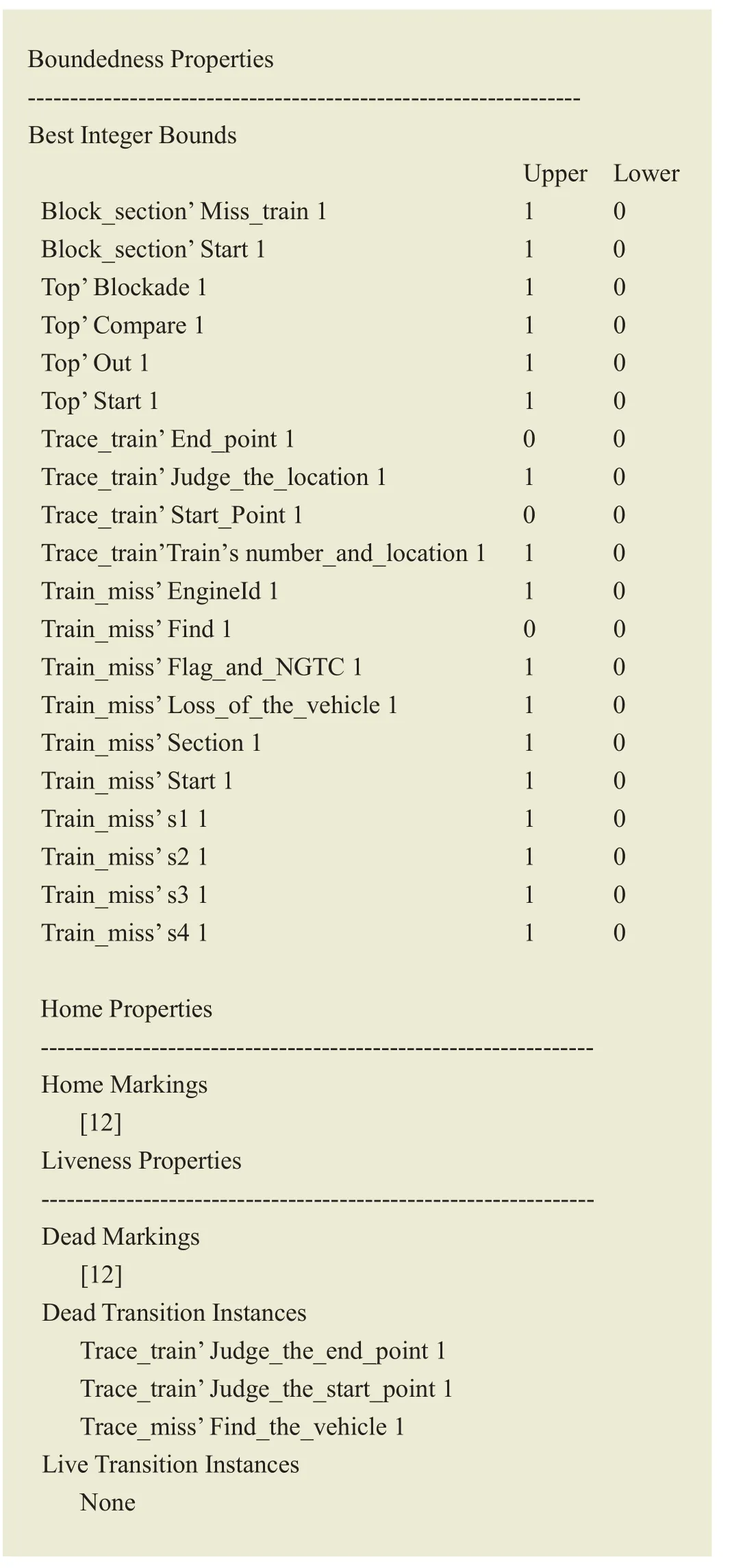
圖13 部分狀態(tài)空間報告

猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
少先隊活動(2021年4期)2021-07-23 01:46:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
沈陽醫(yī)學(xué)院學(xué)報(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
