不同載荷下壓縮機的氣動特性動態監測與控制
2018-09-29 02:38:04逯佳旺李華
智能計算機與應用 2018年4期
關鍵詞:控制
逯佳旺 李華
摘 要:在不同荷載下進行壓縮機的氣動特性動態監測,提高壓縮機的遠程動態控制和自適應故障診斷分析能力,從而改善壓縮機的運行工況。提出一種基于氣動特征傳動匹配和反饋補償的壓縮機的氣動特性動態監測與控制方法。構建不同荷載下壓縮機的氣動特征方程,以進出口壓力差、動力轉矩、轉軸加速度等參量為約束參量,進行壓縮機的荷載與氣動性的最佳匹配控制,在不同荷載下進行壓縮機氣動特征提取,以提取的特征量為輸入進行模糊決策控制,建立反饋補償的壓縮機動態控制模型,實現不同荷載下的壓縮機氣動監測控制。仿真結果表明,采用該方法進行不同載荷下壓縮機的氣動特性動態監測的準確性較好,載荷匹配能力較強,提高了壓縮機的動態控制能力。
關鍵詞:載荷; 壓縮機; 氣動特性; 動態監測; 控制
Abstract: Dynamic monitoring of compressor aerodynamic characteristics under different loads could improve the capability of remote dynamic control and adaptive fault diagnosis and analysis of compressors. In order to improve the operating conditions of the compressor, a dynamic monitoring and control method of the compressor aerodynamic characteristics based on the pneumatic characteristic transmission matching and feedback compensation is proposed, and the aerodynamic characteristic equation of the compressor under different loads is constructed. Taking the parameters such as inlet and outlet pressure difference, dynamic torque, acceleration of rotating shaft as constraint parameters, the optimal matching control of compressor load and aerodynamic performance is carried out, and the aerodynamic characteristics of compressor are extracted under different loads. Taking the extracted characteristic quantity as input, the fuzzy decision control is carried out, the dynamic control model of compressor with feedback compensation is established, and the pneumatic monitoring control of compressor under different loads is realized. The simulation results show that this method has better accuracy and better load matching ability in dynamic monitoring of compressor aerodynamic characteristics under different loads, and improves the dynamic control ability of compressor.
Key words: load; compressor; aerodynamic characteristics; dynamic monitoring; control
引言
壓縮機作為氣體壓縮的重要機械設備,在天然氣西氣東輸工程中具有廣泛的應用,天然氣壓縮機通過壓氣裝置將天然氣壓縮到適當的強度并輸送到管道中實現天然氣的遠程管道輸送。由于西氣東輸工程是國家的重點建設工程,為了保障西氣東輸工程的穩定高效運轉,需要對沿線壓氣站的天然氣壓縮機進行實時動態監測,保障其具有一個穩定的運行工況[1]。天然氣壓縮機的氣動特性能準確反饋壓縮機的機械特性和運行狀態,通過對壓縮機的氣動特性監測和控制,提高壓縮機的動態監測能力,在不同荷載下,壓縮機的氣動特性具有相應的動態特征,通過提取不同荷載下的壓縮機的氣動特性,并進行特征分析和信息融合,實現壓縮機氣動特性監測與控制,相關的控制方法研究在壓縮機狀態監測、模式識別與控制和機械故障智能診斷等領域具有很好的應用價值[2-4]。
本文針對傳統的壓縮機的氣動特性動態監測與控制方法存在穩態誤差和失真的問題,進行控制模型的改進設計,提出一種基于氣動特征傳動匹配和反饋補償的壓縮機的氣動特性動態監測與控制方法。構建不同荷載下壓縮機的氣動特征方程,以進出口壓力差、動力轉矩、轉軸加速度等參量為約束參量,在不同荷載下進行壓縮機氣動特征提取,以提取的特征量為輸入進行模糊決策控制,實現不同載荷下壓縮機的氣動特性監測與控制模型的優化設計。最后進行仿真實驗,展示了本文方法在提高壓縮機的氣動特性動態監測與控制能力方面的優越性。
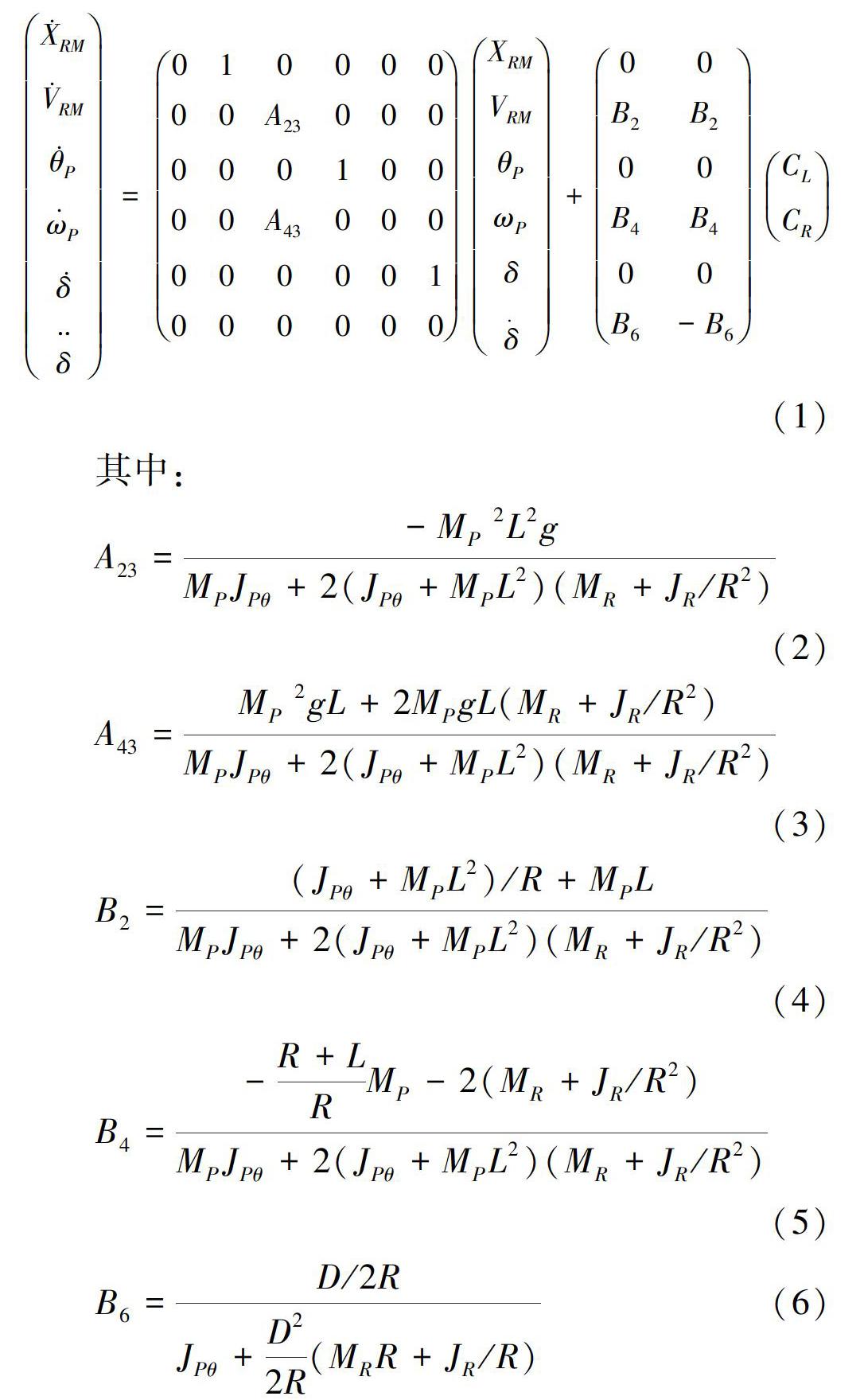
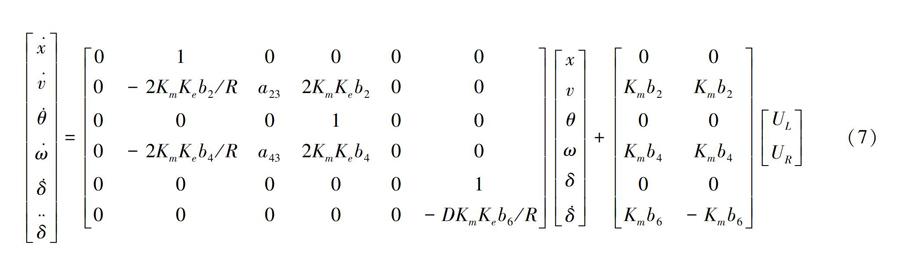
1 約束參量模型及壓縮機氣動特性動力學分析
1.1 控制對象與氣動特性動態監測約束參量模型
壓縮機在工作過程中的氣動特性能有效反饋壓縮機的工作狀況,通過對氣動特性監測,能有效實現壓縮機的工況評估和實時控制。對壓縮機的氣動特性動態監測的穩定性控制是建立在對壓縮機工作物理環境參量信息的采集的測量基礎上的,通過傳感器設備和敏感元件進行壓縮機的氣動特征和力學特征參數采集[5],并采用如圖1所示的Smith模型建立氣動特性動態監測模糊控制對象模型。
分析圖3得知,采用本文方法進行不同荷載下壓縮機的氣動特性監測與控制,具有較好的氣動穩態控制性能,預測輸出和期望輸出具有一致跟蹤能力,說明能實時監測壓縮機的氣動特性,提高壓縮機的實時狀態監控能力。
4 結束語
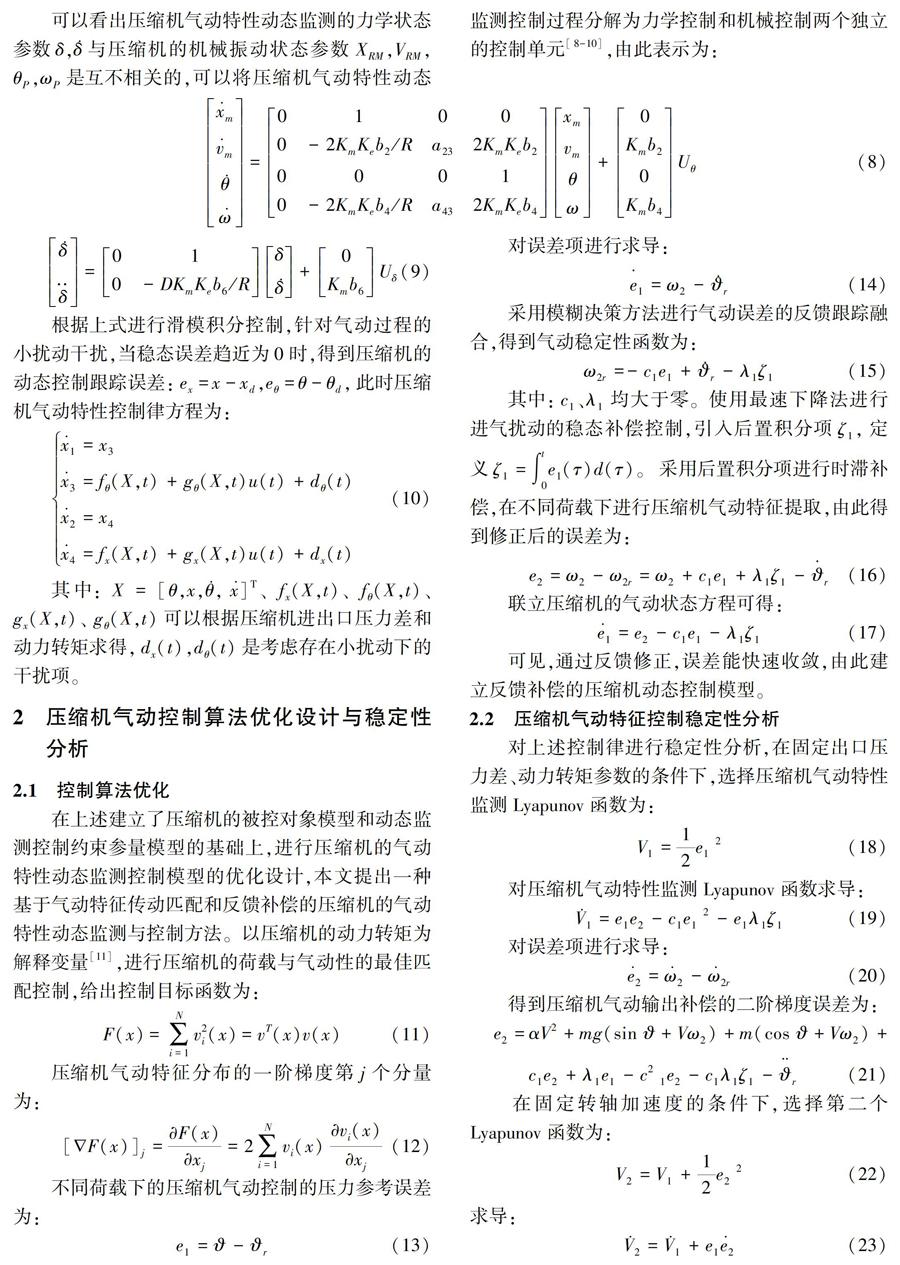
天然氣壓縮機的氣動特性能準確反饋壓縮機的機械特性和運行狀態,通過對壓縮機的氣動特性監測和控制,提高壓縮機的動態監測能力,本文提出一種基于氣動特征傳動匹配和反饋補償的壓縮機的氣動特性動態監測與控制方法。建立壓縮機的氣動特性動態監測控制模型,將壓縮機氣動特性動態監測控制過程分解為力學控制和機械控制兩個獨立的控制單元,建立反饋補償的壓縮機動態控制模型,實現不同荷載下的壓縮機氣動監測控制。研究表明,本文方法能有效實現對壓縮機氣動特性動態監測,對壓縮機的動態穩定性控制能力較好。
參考文獻
[1] 楊俊,周丙寅,張毅,等. 基于遞歸圖分析的壓縮機故障診斷方法研究[J]. 計算機與數字工程,2013,41(6): 984-986.
[2] 李可,米捷. 基于變結構PID的仿生機器人機電控制算法[J]. 河南工程學院學報(自然科學版),2016,28(2):32-37.
[3] 杜學丹, 蔡瑩皓, 魯濤, 等. 一種基于深度學習的機械臂抓取方法[J]. 機器人, 2017, 39(6): 820-828,837.
[4] 任子武,朱秋國,熊蓉. 冗余仿人臂避關節物理約束的一種逆運動學問題求解方法[J]. 機械工程學報,2014,50(19):58-65.
[5] 夏紅偉,翟彥斌,馬廣程,等. 基于混沌粒子群優化算法的空間機械臂軌跡規劃算法[J]. 中國慣性技術學報,2014,22(2):211-216.
[6] LIU H, LIANG Bin, WANG Xueqian, et al. Autonomous path planning and experiment study of free-floating space robot for spinning satellite capturing[C]//13th International Conference on Control,Automation,Robotics & Vision. Singapore:IEEE, 2014:1573-1580.
[7] LIU S, ZHANG Q, ZHOU D. Obstacle avoidance path planning of space manipulator based on improved artificial potential field method[J]. Journal of the Institution of Engineers (India):Series C (Mechanical, Production, Aerospace and Marine Engineering), 2014, 95(1):31-39.
[8] 趙威. 強海水混響背景下水中兵器攻擊目標檢測研究[J]. 智能計算機與應用,2016,6(2):51-54.
[9] 張冀,徐科軍. 自動生成轉速參考曲線的電動執行器定位方法[J]. 電子測量與儀器學報 , 2014,28(11):1222-1234.
[10]徐為民,徐攀. 不確定擾動下雙起升橋吊雙吊具魯棒自適應滑模同步協調控制[J]. 控制與決策, 2016, 31(7): 1192-1198.
[11]李寧, 李亞光, 王宏興,等. 分數階永磁同步電機混沌系統模糊跟蹤控制[J]. 信息與控制, 2016,45(1): 8-13.
[12][JP3]CHEN Bing, LIU Xiaoping, LIU Kefu, et al. Fuzzy approximation-based adaptive control of nonlinear delayed systems with unknown dead zone[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(2): 237-248.
[13]TONG Shaocheng, HUO Baoyu, LI Yongming. Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(1): 1-15.
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
