基于激光攝像式傳感器的軌底坡動態(tài)檢測方法研究
2018-09-28 02:27:52熊仕勇陳春俊
振動與沖擊 2018年18期
關(guān)鍵詞:檢測
熊仕勇, 陳春俊, 王 鋒, 夏 銀
(1. 西南交通大學(xué) 機(jī)械工程學(xué)院, 成都 610031; 2. 西南交通大學(xué) 牽引動力國家重點實驗室, 成都 610031)
由于車輪踏面具有一定錐度,為使鋼軌軸心受力,鋼軌需向內(nèi)側(cè)傾斜,這種鋼軌自身結(jié)構(gòu)向內(nèi)的傾斜度即形成了軌底坡。鋼軌軌底坡是軌道幾何參數(shù)之一,合理設(shè)置軌底坡有利于保證鋼軌軌頭與車輪踏面的合理接觸,提高鋼軌的橫向穩(wěn)定能力,減少輪軌不均勻磨耗及接觸疲勞,減少養(yǎng)護(hù)維修費用,提高車輛輪對與鋼軌的使用壽命[1-3]。
目前,許多鐵路運營單位對軌底坡的測量還局限于靜態(tài)測量,當(dāng)鋼軌“光帶”出現(xiàn)嚴(yán)重偏離鋼軌頂面中心現(xiàn)象后,才對鋼軌軌底坡進(jìn)行檢測調(diào)整。這種養(yǎng)護(hù)作業(yè)方式不僅效率低而且不利于提高車輪和鋼軌的使用壽命。隨著我國城市軌道交通的快速興建,只有對鋼軌軌底坡的動態(tài)檢測才能滿足鐵路的運營維護(hù)需求。鋼軌軌底坡的動態(tài)測量,對軌道幾何參數(shù)實時檢測進(jìn)行養(yǎng)護(hù)維修是確保鐵路運輸安全的重要途徑。我國鐵路自1965年起,軌底坡標(biāo)準(zhǔn)統(tǒng)一由原來的1/20改為1/40,軌底坡的合理設(shè)置還與實際線路情況有關(guān),綜合調(diào)研,軌底坡的設(shè)置在[1/40~1/20],用坡角表示為[0.025~0.05]rad。
隨著我國軌道檢測車的不斷創(chuàng)新發(fā)展,特別是激光攝像技術(shù)在軌道不平順檢測中的應(yīng)用,使得我國軌道檢測技術(shù)實現(xiàn)了質(zhì)的飛越。激光攝像式傳感器的應(yīng)用實現(xiàn)了鋼軌輪廓的連續(xù)動態(tài)測量[4],采用鋼軌輪廓數(shù)據(jù)與標(biāo)準(zhǔn)軌形數(shù)據(jù)對比獲得實際軌形的一些特征參數(shù),借助數(shù)值計算方法便可獲得實際軌道的一些幾何不平順狀態(tài)。在現(xiàn)有軌道檢測車中,添加軌底坡動態(tài)檢測功能有利于全面了解軌道服役狀態(tài),掌握軌道不平順發(fā)展規(guī)律。
針對目前軌底坡檢測現(xiàn)狀,本文基于激光攝像技術(shù)對軌底坡檢測原理方法進(jìn)行了研究,對多個激光攝像式傳感器空間姿態(tài)關(guān)系解算的非線性標(biāo)定模型及標(biāo)定方法,對基于Kalman濾波算法數(shù)據(jù)融合功能的車體振動修正軌底坡計算結(jié)果等核心問題進(jìn)行了研究。最后采用GJ-4型軌道檢測車進(jìn)行實際線路試驗驗證了該檢測方法切實、可行。同時,通過不同線路試驗驗證了Kalman濾波算法數(shù)據(jù)融合模型的正確性,本文采用計算軌底坡坡角大小對軌底坡進(jìn)行表示。
1 基于激光攝像的鋼軌輪廓測量
基于激光攝像及圖像處理技術(shù)的軌底坡動態(tài)檢測方法需要連續(xù)在線檢測鋼軌輪廓。激光攝像式傳感器用于在線檢測鋼軌輪,其原理如圖1所示。以檢測左股鋼軌軌底坡為例,1#、2#激光攝像傳感器安裝在專用檢測梁上,激光攝像式傳感器的安裝需滿足能同時對鋼軌頂面、側(cè)面及軌腰進(jìn)行攝像檢測,檢測梁中部還安裝了傾角儀和光纖陀螺儀,檢測梁與檢測車轉(zhuǎn)向架焊接連接。

圖1 激光攝像式傳感器鋼軌輪廓測量Fig.1 Measurement of rail profile by laser camera transducers
用于軌底坡動態(tài)檢測的激光攝像式傳感器由線型激光器與面陣式CCD攝像機(jī)構(gòu)成,線型激光器發(fā)射線型激光切面,在激光切面內(nèi)形成一個梯形可測范圍平面,如圖2所示。在切面激光的梯形可測范圍內(nèi)的激光投射在鋼軌表面形成鋼軌輪廓線,利用三角測距原理及圖像處理算法,與激光切面具有一定夾角安裝的攝像機(jī)同步收集鋼軌輪廓激光線形,實現(xiàn)連續(xù)在線測量鋼軌輪廓。
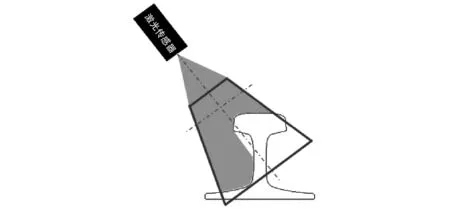
圖2 鋼軌激光輪廓Fig.2 Rail profile
2 鋼軌軌底坡測量
2.1 兩個激光攝像式傳感器標(biāo)定模型
標(biāo)定涉及到系統(tǒng)檢測的精確性和穩(wěn)定性。通常對激光攝像式傳感器的標(biāo)定是確定傳感器內(nèi)部參數(shù),而該檢測系統(tǒng)所介紹的兩個激光攝像式傳感器標(biāo)定是確定兩個激光攝像式傳感器的空間幾何關(guān)系。
以檢測左股鋼軌軌底坡為例,對其精確計算的前提是對1#、2#兩個激光攝像傳感器的空間姿態(tài)關(guān)系進(jìn)行精確標(biāo)定。因此,對兩個激光攝像式傳感器的空間姿態(tài)關(guān)系建立合適的標(biāo)定模型,是提高測量軌底坡精度的前提。對兩個激光攝像式傳感器空間姿態(tài)關(guān)系標(biāo)定,即建立兩個攝像機(jī)像素坐標(biāo)系之間的映射關(guān)系。
如圖3所示。兩個攝像機(jī)坐標(biāo)系分別為Oc1xc1yc1zc1和Oc2xc2yc2zc2,圖像像素坐標(biāo)系分別為Oe1xe1ye1ze1和Oe2xe2ye2ze2。設(shè)(R1|T1)、(R2|T2)分別為1#、2#相機(jī)坐標(biāo)系Oc1xc1yc1、Oc2xc2yc2與世界坐標(biāo)系Owxwywzw之間的旋轉(zhuǎn)矩陣及平移向量,為攝像機(jī)的外部參數(shù),(α,β,γ,u0,v0)為1#相機(jī)內(nèi)部參數(shù)。理想情況下,假設(shè)1#、2#攝像機(jī)可測視角中任何一點(xw,yw,zw)在1#攝像機(jī)中對應(yīng)圖像像素坐標(biāo)為(xe1,ye1),在2#攝像機(jī)中對應(yīng)圖像像素坐標(biāo)為(xe2,ye2)。

圖3 兩個激光攝像式傳感器標(biāo)定示意圖Fig.3 Calibration of two laser camera sensors
根據(jù)映射關(guān)系及攝像機(jī)標(biāo)定理論可知[5-7],世界坐標(biāo)系中任何一點(xw,yw,zw)與相機(jī)像素坐標(biāo)系中坐標(biāo)點有如下關(guān)系,以1#相機(jī)為例
(1)
根據(jù)式(1),便可對相機(jī)內(nèi)部參數(shù)進(jìn)行標(biāo)定求解。而本文針對兩個相機(jī)之間的空間姿態(tài)關(guān)系進(jìn)行標(biāo)定,考慮到兩個攝像機(jī)相對位置固定安裝于檢測梁上因此其空間姿態(tài)關(guān)系具有不變特性,且由于兩個激光器安裝在同一平面,1#、2#攝像機(jī)像素坐標(biāo)系處于同一個空間平面安裝。設(shè)(R|T)為兩個相機(jī)像素坐標(biāo)系之間的旋轉(zhuǎn)矩陣和平移向量
則兩個相機(jī)像素坐標(biāo)系間有如下關(guān)系
(2)
考慮實際攝像機(jī)鏡頭存在徑向畸變、偏心畸變和薄棱畸變[8-10],攝像機(jī)為非線性模型。因此,攝像機(jī)的理想像素坐標(biāo)(xe,ye)會發(fā)生畸變,設(shè)畸變后對應(yīng)的像素坐標(biāo)變?yōu)?u,v),在工程應(yīng)用中,考慮二階徑向畸變已能達(dá)到很高精度。畸變因子如式(3)所示,式中前三項分別為徑向畸變因子、薄棱畸變因子、偏心畸變因子,其中r2=u2+v2。
(3)
因此,畸變像素坐標(biāo)與理想像素坐標(biāo)之間的關(guān)系可表示為
(4)
將式(3)、式(4)代入式(2)可建立兩個攝像機(jī)空間姿態(tài)的非線性關(guān)系模型
(5)
2.2 軌底坡計算方法
對鋼軌軌底坡的計算,首先對1#、2#攝像機(jī)進(jìn)行標(biāo)定獲得兩個攝像機(jī)像素坐標(biāo)系間的空間姿態(tài)關(guān)系,實際標(biāo)定操作圖解,如圖4所示。在檢測梁靜態(tài)下,把帖有足夠多吸光紙的反光板(標(biāo)定尺)水平放置在軌底坡為零的軌道上,圖中激光切面投射在反光板上,由于吸光紙的存在會使得在攝像機(jī)中得到一條間斷的直線,如圖5所示。利用圖像處理技術(shù)得到每個間斷點分別在1#、2#攝像機(jī)中對應(yīng)的像素坐標(biāo)系坐標(biāo)值構(gòu)成一對標(biāo)定數(shù)據(jù)對,利用式(5)兩個攝像機(jī)空間姿態(tài)的非線性關(guān)系模型求解出式(2)中系數(shù)(a1,a2,…,a6),并利用最小二乘擬合得到水平直線在1#攝像機(jī)像素坐標(biāo)系中的斜率值k0,該值將作為計算軌底坡的一個基準(zhǔn)值。
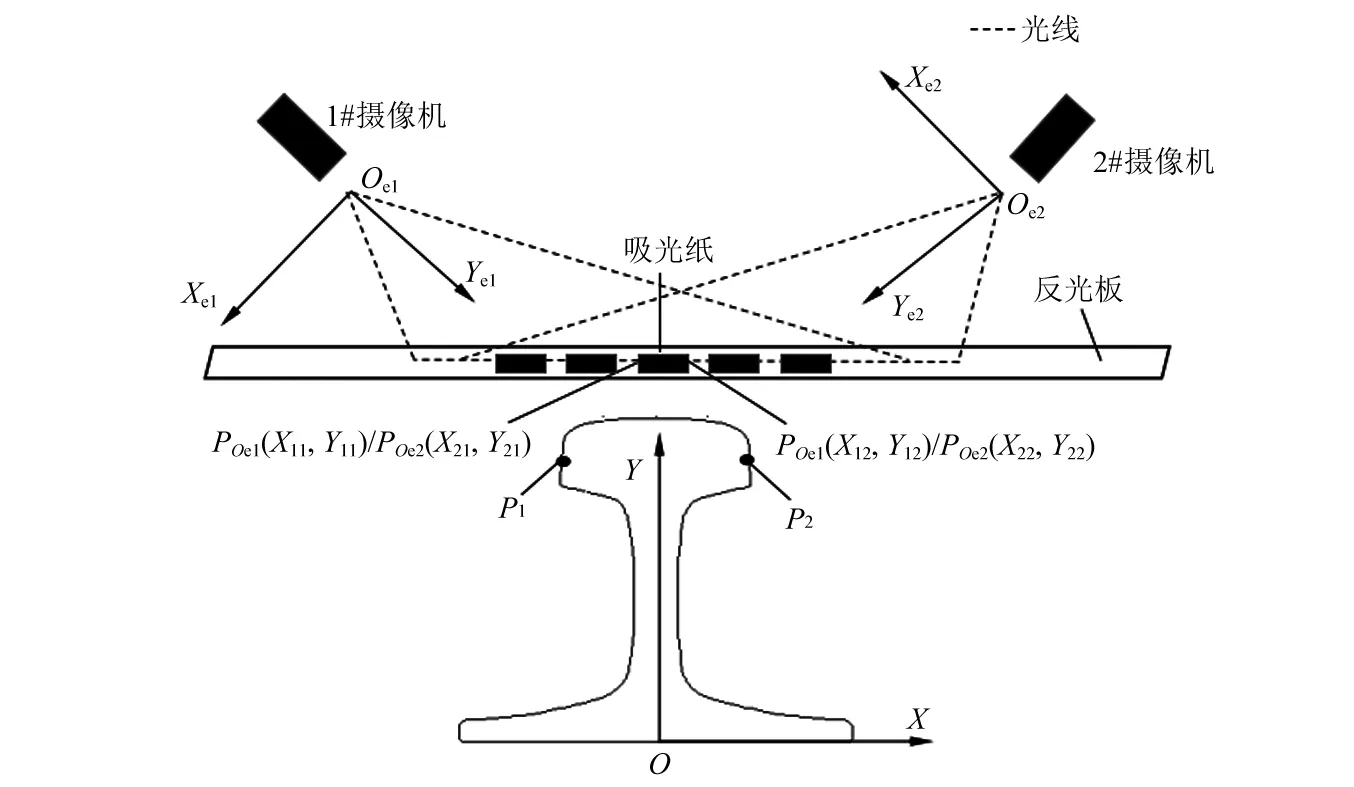
圖4 攝像機(jī)標(biāo)定操作圖解Fig.4 Camera calibration operation
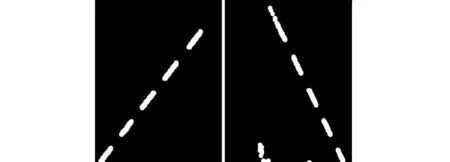
圖5 實測標(biāo)定尺圖像Fig.5 Measured ruler image

(6)
2.3 基于Kalman數(shù)據(jù)融合坡角修正
(7)
為了實時檢測車體側(cè)滾運動角度φ,如圖1所示。檢測梁上還安裝了傾角儀和光纖陀螺儀。由于傾角儀動態(tài)響應(yīng)慢,適合于靜態(tài)測量,光纖陀螺儀適合于動態(tài)測量角度變化,因此利用傾角儀檢測檢測梁側(cè)滾角低頻分量,光纖陀螺儀用于檢測其高頻分量。利用卡爾曼濾波數(shù)據(jù)融合功能建立傾角儀與陀螺儀數(shù)據(jù)融合模型,實時跟蹤檢測梁的振動狀態(tài)。
假設(shè)狀態(tài)向量x(k)=[?kφkφk-1θk]T,其中?k為第k次迭代融合輸出結(jié)果,φk為第k次迭代陀螺儀輸出狀態(tài),φk-1為第k-1次迭代陀螺儀輸出狀態(tài),θk為第k次迭代傾角儀輸出狀態(tài)。通過狀態(tài)向量可建立如下狀態(tài)轉(zhuǎn)移模型
(8)

該檢測系統(tǒng)采用陀螺儀和傾角儀兩個觀測量對檢測梁振動狀態(tài)進(jìn)行估計。由于陀螺儀數(shù)據(jù)需要通過積分才能求得實際角度值,因此可建立如下空間模型,通過建立合適的系統(tǒng)狀態(tài)輸出矩陣,得到觀測向量與系統(tǒng)狀態(tài)向量之間的關(guān)系
(9)
其中,協(xié)方差矩陣
離散Kalman濾波算法迭代關(guān)系如式(10)~式(14),初始條件x-(0|-1)=0、P(0|-1)=0,其中x(k+1|k)是狀態(tài)x(k)的估計,P(k+1|k)為第k次迭代中狀態(tài)協(xié)方差信息更新,為下次迭代用。
e(k)=Z(k)-Hx(k|k-1)
(10)
Re(k)=HP(k│k-1)HT+Rk
(11)
Kp(k)=(FP(k│k-1)FT)+
Qk)HTRe(k)-1
(12)
x(k+1|k)=Fx(k|k-1)+Kp(k)e(k)
(13)
P(k+1|k)=(FP(k│k-1)FT+Qk)×
(I-Kp(k)H)
(14)
3 試驗驗證
3.1 軌底坡計算結(jié)果驗證
為驗證軌底坡計算方法,采用GJ-4型軌道檢測車進(jìn)行設(shè)置障礙試驗,利用有碴軌道便于調(diào)整軌道幾何不平順的特點,在新建的試車線路上進(jìn)行試驗,該線路為直線段軌道,初設(shè)軌底坡為1/40,坡角表示為0.025 rad。
檢測梁安裝如圖6所示。首先進(jìn)行激光攝像式傳感器標(biāo)定操作,以檢測左股鋼軌軌底坡為例,如前文圖5所示采集得到1#、2#攝像機(jī)標(biāo)定尺圖像以標(biāo)定兩個攝像機(jī)空間姿態(tài)關(guān)系,并利用最小二乘擬合得到水平直線在1#攝像機(jī)像素坐標(biāo)系中的斜率值。

圖6 檢測梁裝置實物圖Fig.6 Detection beam physical map
實測左軌內(nèi)、外側(cè)鋼軌輪廓圖像,如圖7所示。結(jié)合標(biāo)定關(guān)系,可得到2#攝像機(jī)圖像在1#攝像機(jī)圖像中的投射圖像,然后利用圖像處理技術(shù)把1#攝像機(jī)中的圖像經(jīng)過灰度變換、濾波預(yù)處理、圖像分割、二值化、輪廓特征提取后與標(biāo)準(zhǔn)軌形輪廓進(jìn)行匹配,匹配結(jié)果,如圖8所示。
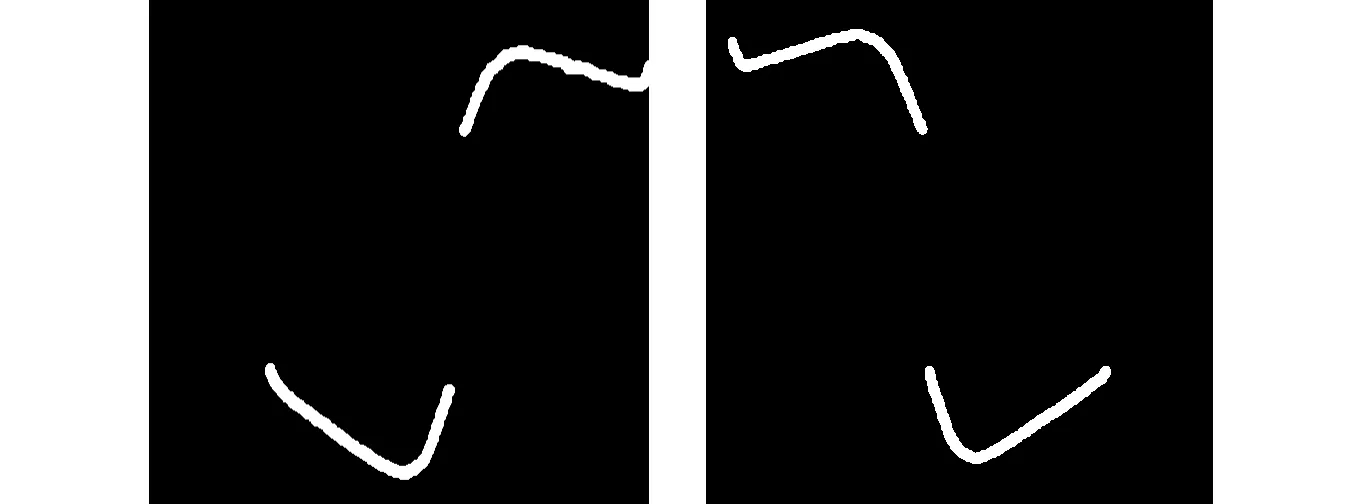
(a)鋼軌外側(cè) (b)鋼軌內(nèi)側(cè)圖7 實測左軌軌形圖像Fig.7 Measured left rail profile image

圖8 左軌實測軌形匹配圖Fig.8 Measured left rail profile matching image
通過與標(biāo)準(zhǔn)輪廓比對后確定,如圖4中所示。軌頭兩個對稱點在1#攝像機(jī)像素坐標(biāo)系中的坐標(biāo)值。最后利用式(6)、式(7)計算出軌底坡坡角大小,如圖9所示。軌底坡理論設(shè)障值與本文方法動態(tài)計算值統(tǒng)計,如表1所示。

圖9 左軌軌底坡計算結(jié)果Fig.9 The calculation results of the left rail cant

距離區(qū)間/m人工設(shè)障平均值/rad動態(tài)檢測平均值/rad誤差/rad480~58000.0060.0061 058~1 1580.0450.036-0.009
誤差分析:從表1可知,該檢測系統(tǒng)還存在較大的誤差,分析誤差的主要來源有激光攝像式傳感器檢測誤差;兩個傳感器空間幾何關(guān)系標(biāo)定誤差;傾角儀及陀螺儀受自身的沉浮、側(cè)滾振動所引起的誤差;輪廓圖像匹配精度等。從圖9 和表1可知,本文軌底坡計算結(jié)果能夠有效反應(yīng)鋼軌軌底坡變化趨勢,并且對檢測結(jié)果具有一定精度。可為鐵路運營單位高效快速的養(yǎng)護(hù)維修作業(yè)提供一定的依據(jù),提前預(yù)測鋼軌變化趨勢,及時調(diào)整病害可提高車輪及鋼軌使用壽命。
3.2 坡角修正算法驗證
為了能驗證本文所建立的Kalman濾波補償算法的正確性,對軌底坡的動態(tài)檢測修正需車體具有較大側(cè)滾姿態(tài),所以試驗工況選為在運營的地鐵線路。同樣,按照“3.1”節(jié)中試驗方法進(jìn)行試驗,試驗采集得到傾角儀和陀螺儀原始數(shù)據(jù),如圖10所示。利用本文所建立的Kalman濾波算法數(shù)據(jù)融合模型濾波后得到車體側(cè)滾角度曲線,如圖11所示。

(a)傾角儀原始數(shù)據(jù)曲線
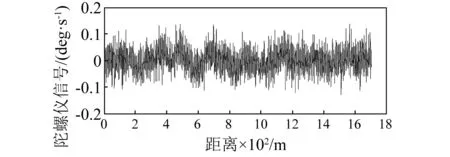
(b)光纖陀螺儀原始數(shù)據(jù)曲線圖10 傾角儀和陀螺儀原始數(shù)據(jù)曲線圖Fig.10 Curve of inclinometer and gyroscope

圖11 Kalman濾波數(shù)據(jù)融合后結(jié)果圖Fig.11 Results of Kalman filter data fusion
最后通過文中所介紹的軌底坡檢測方法得到如圖12所示的軌底坡檢測結(jié)果。從圖12可知,Kalman數(shù)據(jù)融合修正模型可以很好地對車體側(cè)滾振動進(jìn)行補償。
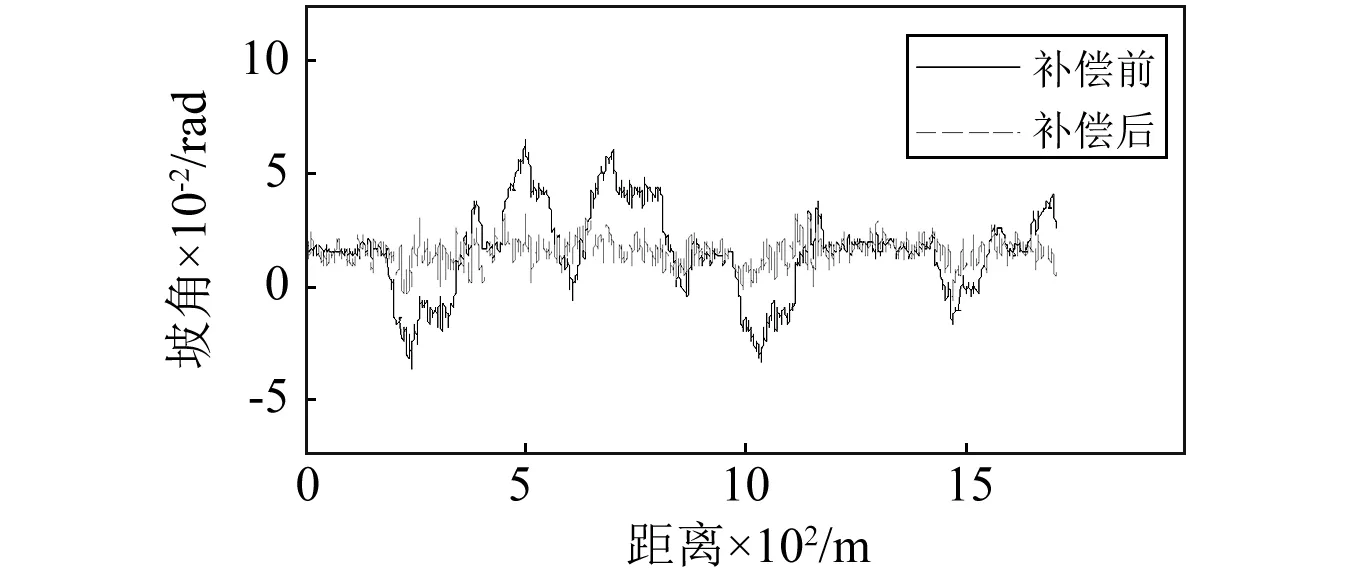
圖12 左軌軌底坡計算結(jié)果Fig.12 Results of the left rail cant
4 結(jié) 論
(1)提出了一種基于激光攝像的軌底坡動態(tài)測量方法。
(2)建立了適用于軌底坡動態(tài)檢測的兩個激光攝像式傳感器空間姿態(tài)關(guān)系的非線性標(biāo)定解算模型及標(biāo)定方法。
(3)利用Kalman濾波算法的數(shù)據(jù)融合功能建立了對多傳感器信號處理的狀態(tài)空間模型,經(jīng)過Kalman濾波后的傳感器數(shù)據(jù)能很好地對軌底坡坡角計算結(jié)果進(jìn)行振動補償修正。
(4)通過實車試驗驗證了軌底坡計算方法切實、可行,同時通過對實測數(shù)據(jù)的處理驗證了振動補償?shù)腒alman濾波數(shù)據(jù)融合模型解算算法的準(zhǔn)確性。
想要利用本文所提出的動態(tài)檢測方法精確計算軌底坡,其需滿足兩個前提條件:①精確標(biāo)定兩個激光攝像式傳感器空間姿態(tài)關(guān)系,建立精確的標(biāo)定模型,尋找合適的標(biāo)定方法;②能實時補償車體側(cè)滾振動對計算結(jié)果的影響,精確跟蹤車體振動狀態(tài)。
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
