柔性蒙皮形狀監測的光纖光柵傳感及重構方法*
2018-09-27 08:09:26張俊康孫廣開祝連慶
傳感器與微系統 2018年10期
關鍵詞:變形
張俊康, 李 紅, 孫廣開, 祝連慶
(北京信息科技大學 光電信息與儀器北京市工程研究中心,北京 100016)
0 引 言
飛行器的氣動特性由柔性蒙皮的形狀直接決定,必須采用有效的技術方法實時監測柔性蒙皮的變形形狀,使其達到既定的變體形狀和位置精度,對保證飛機高速飛行狀態下的氣動特性、機動性、穩定性和安全性至關重要[1]。
作為柔性蒙皮的主要研究方向之一的柔性表層結構[2],就融入結構基體的分布傳感技術而言,光纖Bragg光柵[3,4](fiber Bragg grating,FBG),構成的柔性蒙皮適用于機翼變形物理量的實時監測,可將光纖傳感技術與面型重構方法和圖形可視化技術結合起來,根據光纖傳感網絡測得的飛機機翼各測點應變等物理量信息,重構變形后的三維形狀,實時監測機翼變形姿態。
在國外,美國LUNA創新公司的Duncan R G等人[5]利用波分復用的光纖光柵傳感器陣列構建光纖全局定位系統,實驗數據表明利用光纖傳感技術可以準確重構出結構的二維和三維形狀,誤差值可以達到1.2 %。Blandino J等人[6]研究了FBG傳感器對飛機吊桿結構彎曲形狀和運動跟蹤的傳感。Kressel I等人[7]將光纖光柵傳感器嵌入用于臨床手術的器械中,利用傳感器的監測信號實現對手術器械在體內腔道中的形狀和位置進行實時監測。Jutte C V等人[8]在機翼地面載荷試驗中,利用光纖光柵傳感器陣列進行了全尺度機翼彎曲和扭曲形態的測量。國內,上海大學錢晉武教授課題組的邱亞等人[9]研究了利用光纖光柵傳感器測量空間曲率信息進而對線性、桿形結構形態重構的方法。張合生等人[10]研究了太空柔性伸展機械臂的光纖光柵傳感與重構方法。狄海廷等人[11]提出了利用環形光纖曲率傳感器進行三維曲面重構的方法。與國外相比,目前我國在針對變體飛機柔性蒙皮形態的光纖傳感技術方面,針對性的研究工作十分匱乏、技術差距明顯,而國外一貫實行嚴密的技術封鎖。因此,本文對硅膠板構成的變形機翼柔性蒙皮,建立機翼曲面的仿真模型,在變形機翼實驗原型的基礎上對柔性蒙皮變形角度進行測量。
1 形狀重構原理
柔性蒙皮三維形狀重構近似為空間面型的曲面重構問題。根據曲面微分幾何學,曲率信息是曲線、曲面的關鍵表征參量,曲率和弧長信息決定的曲面的唯一形狀,在實時監測時,通過FBG得到測量點的應變信息,進而轉化為該點的曲率信息。
1.1 曲率檢測原理
FBG傳感器的中心波長為
λB=2neff·Λ
(1)
式中λB為FBG的中心波長,neff為有效折射率,Λ為光柵周期。溫度保持恒定時,光纖光柵受縱向拉伸或壓縮作用,即其僅受軸向應變ε,光柵周期Λ將會改變,此時中心波長會發生漂移ΔλB為ΔλB=λB·(1-Pe)·ε,Pe為光纖的彈光系數。FBG的被測點可以建模為圓形截面的變形梁,當對其施加一個軸向應變時,變形梁上下表面會同時承受拉伸和壓縮,會形成一個圓弧,如圖1所示。在變形彎曲變形區內,在縮短和伸長的兩個變形區之間,應變中性層的長度始終不變,即應變量為0。圖中虛線表示中性層,L為微元長度,ΔL為結構微元長度的變化量,ρ為曲率半徑,θ為圓弧的圓心角[12]。
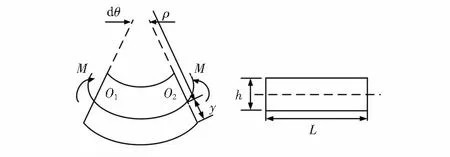
圖1 曲率推導模型

(2)
對于FBG傳感器,λB,h,ΔλB,Pe均為常量,因此式(2)中A為常數,曲率k的大小與ΔλB呈線性關系,只要檢測FBG傳感器測點的中心波長變化量ΔλB即可獲得k的大小,為基于曲率信息的機翼原型曲面重構算法提供基礎數據。
1.2 曲面重構算法
將曲面離散為多條平面曲線,首先完成曲面上多條曲線的重構,然后通過B樣條插值的數值計算方法實現曲面重構。

(3)


圖2 曲線上點坐標計算幾何模型
圖3為曲面變形角度計算示意,本文曲面變形角度的定義是曲面在xz平面的投影曲線末端切線與x軸的夾角,即圖中兩個虛線的夾角。圖中曲線C為曲面在xz平面內的投影,則曲面的變形角度為θ=α+Δα。
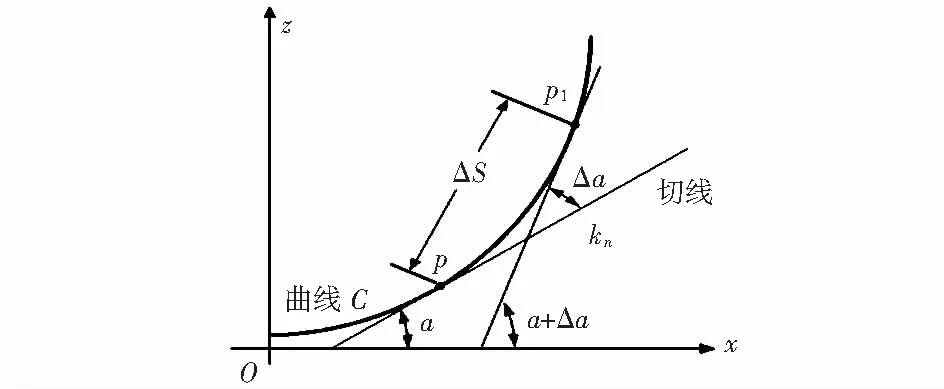
圖3 曲面變形角度計算示意
2 實驗系統設計
采用一臺ASE寬帶光源作為試驗用光源,光源為c波段:1 530~1 565 nm;采用實驗室紫外刻寫的光纖光柵作為傳感器,FBG波長為:1 536.53,1 539.76,1 544.25,1 546.33,1 557.37,1 561.43 nm;采用一臺筆記本電腦作為上位機,用來顯示柔性蒙皮面型重構結果;采用一臺實驗室自主研制解調儀作為實驗的解調裝置,解調儀CCD像素為512,解調速率最高可達17 kHz,實驗用解調速率為100~200 Hz ,保證動態實時顯示結構形態和準確定位。采用自主設計的柔性機翼原型作為實驗對象,翼梁材質為鋼,翼肋材質為航空專用鋁合金,機構變形的驅動為電機驅動。采用上海力全橡塑有限公司生產的硅膠薄板作為柔性蒙皮的材料,硅膠薄板的厚度為0.05 mm。
將兩塊硅膠用道康寧732單組份多功能密封橡膠粘起來,然后將光纖光柵傳感器夾在兩塊硅膠中間。以此保證柔性蒙皮的變形能夠更好地傳遞到傳感器,布局方式為:傳感器之間間隔10 cm,沿機翼弦向變形方向等間距布設,保證柔性蒙皮變形時產生的彎曲形變方向與FBG軸向感知方向一致。
柔性蒙皮曲面重構過程原理如圖4所示,狀態一為蒙皮初始狀態下的平面,狀態二為蒙皮變形后的曲面,由狀態一到狀態二過程中,FBG傳感器拉伸,中心波長漂移,解調儀解調出中心波長的漂移量,利用曲面擬合程序將中心波長的漂移量計算為每個點坐標值,最后在坐標系中擬合出蒙皮變形后的曲面。
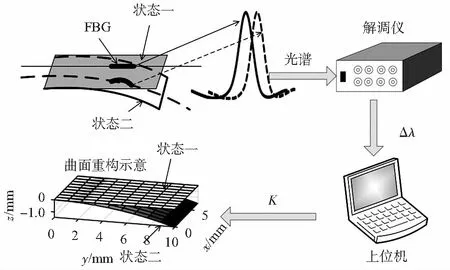
圖4 曲面重構過程原理
3 仿真分析
通過實驗標定出FBG與硅膠板粘貼時應變系數,構建柔性蒙皮仿真模型,驗證柔性蒙皮曲面重構算法的可行性。
建立的硅膠蒙皮模型尺寸為40 mm×10 mm,蒙皮厚度為1 mm,曲面變形角度與被測點曲率的關系為變形角度為-30°,10°,20°,30°時,對應曲率分別為-1.047 2,0.349 1,0.698 1,1.047 2。在MATLAB中將曲面的變形角度對應的曲率作為輸入,利用曲面重構算法及可視化技術對曲面進行重構,圖5為對應的仿真曲面。
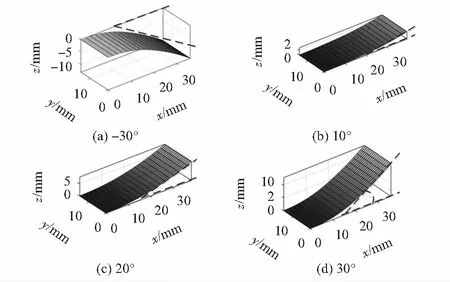
圖5 不同變形角度曲面重構仿真
4 實驗與結果分析
柔性蒙皮形狀重構實驗系統驅動器為步進電機,電機減速比為1︰90,通過電機控制器控制輸出脈沖進而控制步進角,變形機翼采用4軸旋轉結構,第1個軸為固定軸,通過調節另3個驅動軸轉動不同的角度實現機翼的變形,機翼帶動柔性智能蒙皮變形。解調儀將FBG的中心波長上傳給上位機,解算波長漂移量,換算為被測點的曲率信息,由曲面重構算法重構翼面形狀。
實驗過程中柔性智能蒙皮的變形角度為15°,30°,分析可知:當柔性蒙皮變形角度增加時,FBG中心波長紅移,當變形角度減小時,FBG中心波長藍移,但不同位置傳感器漂移量不相同,如圖6所示,因為變形機翼變形時不同的旋轉軸旋轉角度不相同,導致不同位置的傳感器的變形量不相同;由分析可知,柔性蒙皮變形角度與FBG傳感器中心波長漂移量呈線性關系。

圖6 不同位置FBG波長漂移量與變形角度的關系
5 結 論
1)基于曲率的曲面重構算法實現柔性蒙皮的曲面重構具有可行性,為變形機翼柔性蒙皮監測的實現奠定了理論基礎。
2)柔性蒙皮曲面監測時FBG傳感器中心波長漂移量與柔性蒙皮變形角度呈線性關系,且與被測點的位置有關系,在布置傳感器時要考慮被測點的變形能夠被FBG監測且未超出FBG的最大測量范圍。
3)基于光纖光柵的柔性蒙皮曲面重構方法適用于變形機翼蒙皮的監測,但曲面重構算法還需要進一步優化,由于實驗條件所限對于柔性蒙皮的重構精度還需進一步提高。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36