單軸旋轉(zhuǎn)捷聯(lián)慣性導(dǎo)航系統(tǒng)誤差分析與轉(zhuǎn)位方案研究
2018-09-26 03:28:44劉生攀王文舉饒興橋
兵工學(xué)報 2018年9期
關(guān)鍵詞:系統(tǒng)
劉生攀, 王文舉, 饒興橋
(貴州航天控制技術(shù)有限公司, 貴州 貴陽 550009)
0 引言
光纖陀螺是一種無機械轉(zhuǎn)動的全固態(tài)陀螺,廣泛應(yīng)用于捷聯(lián)慣性導(dǎo)航(簡稱慣導(dǎo))系統(tǒng)中[1]。光纖陀螺的常值漂移是引起慣導(dǎo)系統(tǒng)導(dǎo)航誤差的主要因素,需要采用相關(guān)技術(shù)予以補償。旋轉(zhuǎn)調(diào)制技術(shù)是捷聯(lián)慣導(dǎo)系統(tǒng)中一種常用的誤差自校準(zhǔn)方法,它可以在不使用外部信息的情況下,通過對慣性測量單元(IMU) 的周期性轉(zhuǎn)動調(diào)制慣性器件的常值誤差,從而減小對系統(tǒng)精度的影響[2]。美國在20世紀(jì)70年代開始了此類系統(tǒng)的研究,典型研究成果有MK39Mod3C、WSN-7B單軸旋轉(zhuǎn)系統(tǒng),MK49、WSN-7A雙軸旋轉(zhuǎn)系統(tǒng)以及ADMII、ADMIII三軸旋轉(zhuǎn)系統(tǒng),目前國外的單軸、雙軸旋轉(zhuǎn)式慣導(dǎo)系統(tǒng)已經(jīng)大量裝備海軍,三軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)也已經(jīng)完成各項驗證試驗,并有望替代靜電陀螺平臺式慣導(dǎo)系統(tǒng)應(yīng)用于核潛艇[3-5]。近年來國內(nèi)許多研究機構(gòu)也開展了旋轉(zhuǎn)式慣導(dǎo)系統(tǒng)的研究工作。文獻[6]分析了單軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自補償基本原理,對影響旋轉(zhuǎn)調(diào)制效果的各項誤差進行了研究和系統(tǒng)驗證試驗。文獻[7]分析了慣性測量組件的誤差模型和旋轉(zhuǎn)式捷聯(lián)系統(tǒng)誤差傳播方程,設(shè)計了單軸正反轉(zhuǎn)停和雙軸轉(zhuǎn)位的系統(tǒng)旋轉(zhuǎn)方案,并進行了相應(yīng)的數(shù)學(xué)仿真。文獻[8-9]提出了一種帶傾斜轉(zhuǎn)位機構(gòu)的單軸旋轉(zhuǎn)調(diào)制方案,將IMU放置一定的傾斜角度便可以消除轉(zhuǎn)軸方向上陀螺常值漂移誤差對導(dǎo)航精度的影響,其定位精度與雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)相當(dāng)。文獻[10]推導(dǎo)了兩位置最優(yōu)對準(zhǔn)方案,并設(shè)計相關(guān)試驗驗證了方案的可行性和精度。上述文獻對旋轉(zhuǎn)調(diào)制誤差補償?shù)脑矶甲隽嗽敿?xì)研究,但對系統(tǒng)的旋轉(zhuǎn)方式以及工程適用性缺少必要的研究與說明。本文在對IMU誤差調(diào)制機理分析的基礎(chǔ)上,給出了單軸單向連續(xù)旋轉(zhuǎn)、大于360°兩位置正反轉(zhuǎn)停、小于360°四位置正反轉(zhuǎn)停的3種旋轉(zhuǎn)方式,對不同旋轉(zhuǎn)方案的誤差調(diào)制效果以及工程適用性進行了說明,并在單軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)上進行了驗證試驗。
1 旋轉(zhuǎn)調(diào)制原理
傳統(tǒng)捷聯(lián)慣導(dǎo)系統(tǒng)中,IMU直接與載體固連,它們之間沒有相對運動。旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)中IMU安裝在轉(zhuǎn)位機構(gòu)上,導(dǎo)航計算機控制轉(zhuǎn)位機構(gòu)使其做周期性轉(zhuǎn)動。本文中IMU由3個光纖陀螺和3個石英撓性加速度計正交安裝組成,旋轉(zhuǎn)機構(gòu)具有繞天向軸單軸旋轉(zhuǎn)的功能,IMU固連在旋轉(zhuǎn)機構(gòu)上。
定義:s系為旋轉(zhuǎn)坐標(biāo)系;b系為載體坐標(biāo)系;n系為導(dǎo)航坐標(biāo)系;i系為慣性坐標(biāo)系;e系為地球坐標(biāo)系。初始時刻s系與b系重合。
單軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)中IMU繞b系的Ozb連續(xù)旋轉(zhuǎn),在t時刻旋轉(zhuǎn)角速度為Ω,b系相對于s系的變換矩陣為
(1)
在旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)中,考慮標(biāo)度因數(shù)誤差與安裝誤差,陀螺和加速度計輸出誤差為
(2)
式中:Δωs為陀螺輸出誤差;Δfs為加速度計輸出誤差;ω為陀螺測量的角速度;f為加速度計測量的比力;Kg、Ka分別為陀螺和加速度計的標(biāo)度因數(shù)誤差陣;θg、θa分別為陀螺和加速度計安裝誤差陣;Bg為陀螺常值漂移;Ba為加速度計常值偏置;δω、δf分別為陀螺和加速度計隨機誤差。
根據(jù) (1) 式可以將陀螺和加速度計輸出誤差由旋轉(zhuǎn)坐標(biāo)系s轉(zhuǎn)換到載體坐標(biāo)系b:
(3)
式中:Δωx、Δωy、Δωz分別為陀螺輸出誤差在當(dāng)前坐標(biāo)系x軸、y軸、z軸的分量;Δfx、Δfy、Δfz分別為加速度計輸出誤差在當(dāng)前坐標(biāo)系x軸、y軸、z軸的分量。
由(3)式可以看出,IMU經(jīng)過周期性轉(zhuǎn)動后,x軸和y軸慣性元件的常值誤差呈周期性變化,一個積分周期內(nèi)其誤差為0,z軸誤差沒有變化。
2 旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)誤差調(diào)制機理分析
在旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)中,慣性元件自身漂移并沒有因為系統(tǒng)級旋轉(zhuǎn)有任何改變,轉(zhuǎn)動只是使慣性元件漂移引起的導(dǎo)航誤差在轉(zhuǎn)動周期內(nèi)互相抵消,從而使漂移不再引起導(dǎo)航方程解的發(fā)散。旋轉(zhuǎn)導(dǎo)航系統(tǒng)采用的仍然是捷聯(lián)慣導(dǎo)系統(tǒng)的導(dǎo)航算法,在導(dǎo)航計算機內(nèi)部建立“數(shù)學(xué)平臺”來跟蹤IMU的姿態(tài),系統(tǒng)誤差方程與捷聯(lián)系統(tǒng)的誤差方程一致,因此不難推出旋轉(zhuǎn)慣導(dǎo)系統(tǒng)的誤差傳播方程[2]為
(4)


考慮標(biāo)度因數(shù)誤差以及安裝誤差,陀螺組合件誤差模型可寫成:
(5)
2.1 標(biāo)度因數(shù)誤差旋轉(zhuǎn)調(diào)制分析
只考慮標(biāo)度因數(shù)誤差時,陀螺組合件誤差為
(6)
通過分析推導(dǎo)可得
(7)
式中:
由(7)式可以看出,經(jīng)過旋轉(zhuǎn)調(diào)制后標(biāo)度因數(shù)引起的水平方向誤差依然存在直流分量,即單軸旋轉(zhuǎn)調(diào)制對水平方向上標(biāo)度因數(shù)誤差的補償作用有限,但在方位軸上引入了大小為KgzΩ的常值漂移,例如:當(dāng)方位軸陀螺標(biāo)度因數(shù)誤差為10×10-6時,轉(zhuǎn)位機構(gòu)16°/s的轉(zhuǎn)速將引入0.576°/h常值漂移,這對于高精度慣導(dǎo)系統(tǒng)是不可容忍的。
因此單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)要避免向某一個方向持續(xù)轉(zhuǎn)動,應(yīng)該將正轉(zhuǎn)和反轉(zhuǎn)相結(jié)合,采取正反交替的旋轉(zhuǎn)方式。將此種方式下的誤差進行積分,水平方向和轉(zhuǎn)位軸方向上與Ω有關(guān)的誤差項積分為0,從而將標(biāo)度因數(shù)與轉(zhuǎn)位運動之間的耦合誤差予以抵消。
2.2 安裝誤差旋轉(zhuǎn)調(diào)制分析
同理,只考慮安裝誤差時, (5)式可簡化為
(8)
通過分析推導(dǎo)可得
(9)
式中:
由(9)式可以看出,經(jīng)過旋轉(zhuǎn)調(diào)制后,旋轉(zhuǎn)軸方向上的安裝誤差能夠被調(diào)諧掉,水平方向依然存在常值誤差項,不過通過前期的轉(zhuǎn)臺精確標(biāo)定,這些安裝誤差量基本都能控制在角秒級范圍內(nèi),因此無論采用何種旋轉(zhuǎn)方式,其對系統(tǒng)精度的影響都不大,后續(xù)通過仿真也驗證了該結(jié)論的正確性。
2.3 常值漂移誤差旋轉(zhuǎn)調(diào)制分析
當(dāng)只考慮常值漂移誤差時,陀螺組合件誤差為
(10)
當(dāng)轉(zhuǎn)軸做周期性旋轉(zhuǎn)時,與轉(zhuǎn)軸相垂直平面上的常值漂移被調(diào)制,而轉(zhuǎn)軸上的陀螺常值漂移沒有任何補償作用。等效北向陀螺常值漂移和天向陀螺常值漂移決定了系統(tǒng)最終的經(jīng)度誤差,單軸旋轉(zhuǎn)調(diào)制系統(tǒng)中,水平方向上的陀螺常值漂移經(jīng)過旋轉(zhuǎn)調(diào)制后誤差被抵消,因此系統(tǒng)能在一定程度上抑制經(jīng)度誤差的積累,從而可以提高捷聯(lián)慣導(dǎo)系統(tǒng)的定位精度。
2.4 隨機漂移誤差旋轉(zhuǎn)調(diào)制分析
加速度計組合件輸出誤差的調(diào)制結(jié)果與陀螺組合件輸出誤差的調(diào)制結(jié)果相類似,具有相同的結(jié)論。
3 旋轉(zhuǎn)方案設(shè)計
3.1 單軸單向連續(xù)旋轉(zhuǎn)
單軸連續(xù)旋轉(zhuǎn)調(diào)制系統(tǒng)描述如下:初始時刻s系與b系重合,啟動上電后轉(zhuǎn)位機構(gòu)以一定的角加速度加速至角速度Ω,然后轉(zhuǎn)位機構(gòu)一直以該恒定角速度連續(xù)旋轉(zhuǎn),直到導(dǎo)航系統(tǒng)關(guān)機、停止工作為止。
3.2 大于360°兩位置正反轉(zhuǎn)停旋轉(zhuǎn)
大于360°兩位置正反轉(zhuǎn)停旋轉(zhuǎn)方案如圖1所示,轉(zhuǎn)動方案描述如下:
次序1:IMU從A點出發(fā)逆時針轉(zhuǎn)180°到達位置B點,停止時間為t;
次序2:IMU從B點出發(fā)順時針轉(zhuǎn)180°到達位置A點,停止時間為t;
次序3:IMU從A點出發(fā)順時針轉(zhuǎn)180°到達位置B點,停止時間為t;
次序4:IMU從B點出發(fā)逆時針轉(zhuǎn)180°到達位置A點,停止時間為t.
然后按照次序1~次序4的順序循環(huán)運動,不同位置處停留5 min.
3.3 小于360°四位置正反轉(zhuǎn)停旋轉(zhuǎn)
小于360°兩位置正反轉(zhuǎn)停旋轉(zhuǎn)方案如圖2所示,轉(zhuǎn)動方案描述如下:
次序1:IMU從位置A點逆時針轉(zhuǎn)動180°到達位置C點,停止時間為t;
次序2:IMU從位置C點逆時針轉(zhuǎn)動90°到達位置D點,停止時間為t;
次序3:IMU從位置D點順時針轉(zhuǎn)動180°到達位置B點,停止時間為t;
次序4:IMU從位置B點順時針轉(zhuǎn)動90°到達位置A點,停止時間為t;
然后按照次序1~次序4的順序循環(huán)運動,不同位置處停留5 min.
4 仿真研究
4.1 仿真環(huán)境設(shè)置
4.1.1 慣性器件性能仿真條件
假設(shè):3個陀螺的常值漂移均為0.01°/h,隨機游走系數(shù)為0.001°/h1/2,標(biāo)度因數(shù)誤差為10×10-6,陀螺組件的6個安裝誤差角為10″;3個加速度計的偏置均為100×10-6g,隨機白噪聲標(biāo)準(zhǔn)差為200×10-6g,標(biāo)度因數(shù)誤差為10×10-6,加速度計組件的6個安裝誤差角為10″;轉(zhuǎn)位機構(gòu)測角精度為5″.
4.1.2 仿真環(huán)境
初始經(jīng)度106.690 6°,初始緯度26.501 9°;系統(tǒng)模擬搖擺運動,姿態(tài)角變化規(guī)律分別為:俯仰角θ=5°sin(2πt/5),橫搖角γ=2°sin(2πt/1.25),航向角Ψ=5°sin(2πt/5).
假設(shè)初始航向角誤差為1′,初始俯仰角誤差和橫搖角誤差均為15″,旋轉(zhuǎn)機構(gòu)測角誤差為30″,陀螺和加速度計采樣間隔時間為5 ms,由于連續(xù)旋轉(zhuǎn)方式不具有工程應(yīng)用價值,這里僅對以下3種方案進行仿真,仿真時間設(shè)置為72 h:
1) 沒有旋轉(zhuǎn);
2) 大于360°兩位置正反轉(zhuǎn)停旋轉(zhuǎn),轉(zhuǎn)速為16°/s,每個位置停留時間為5 min;
3) 小于360°四位置正反轉(zhuǎn)停旋轉(zhuǎn),轉(zhuǎn)速為16°/s,每個位置停留時間為5 min.
4.2 仿真結(jié)果
圖3給出了3種轉(zhuǎn)位方式下的導(dǎo)航定位誤差曲線。
由圖3可以看出,兩位置正反轉(zhuǎn)停方案與四位置正反轉(zhuǎn)停方案72 h的定位精度相當(dāng),分別為18.37 n mile和18.36 n mile,而非旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)中,同樣慣性器件誤差條件下,其72 h定位誤差為55.52 n mile,這充分體現(xiàn)了旋轉(zhuǎn)調(diào)制的作用,同時也表明了四位置轉(zhuǎn)停方案與兩位置轉(zhuǎn)停方案具有同樣的抑制導(dǎo)航誤差性能。由于兩位置轉(zhuǎn)停方案旋轉(zhuǎn)角度為360°,四位置轉(zhuǎn)停方案旋轉(zhuǎn)角度為270°,四位置轉(zhuǎn)停方案不需要加裝導(dǎo)電滑環(huán),實現(xiàn)起來更加簡單,是一種最為有效的單軸旋轉(zhuǎn)方式。
5 試驗及分析
利用實驗室三軸轉(zhuǎn)臺、車載試驗系統(tǒng)和自行研制的單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)進行驗證試驗,其中IMU由3個光纖陀螺與3個石英撓性加速度計組成,轉(zhuǎn)臺試驗環(huán)境和車載試驗環(huán)境分別如圖4和圖5所示。單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)的主要技術(shù)參數(shù)見表1.
在轉(zhuǎn)臺試驗環(huán)境中,慣導(dǎo)系統(tǒng)安裝在三軸轉(zhuǎn)臺上,將三軸轉(zhuǎn)臺設(shè)置在三軸搖擺狀態(tài),其中搖擺規(guī)律分別為:俯仰角θ=5°sin(2πt/5),橫搖角γ=2°sin(2πt/1.25),航向角Ψ=5°sin(2πt/5). 在搖擺過程中給慣導(dǎo)系統(tǒng)上電,全程采集試驗過程數(shù)據(jù)。
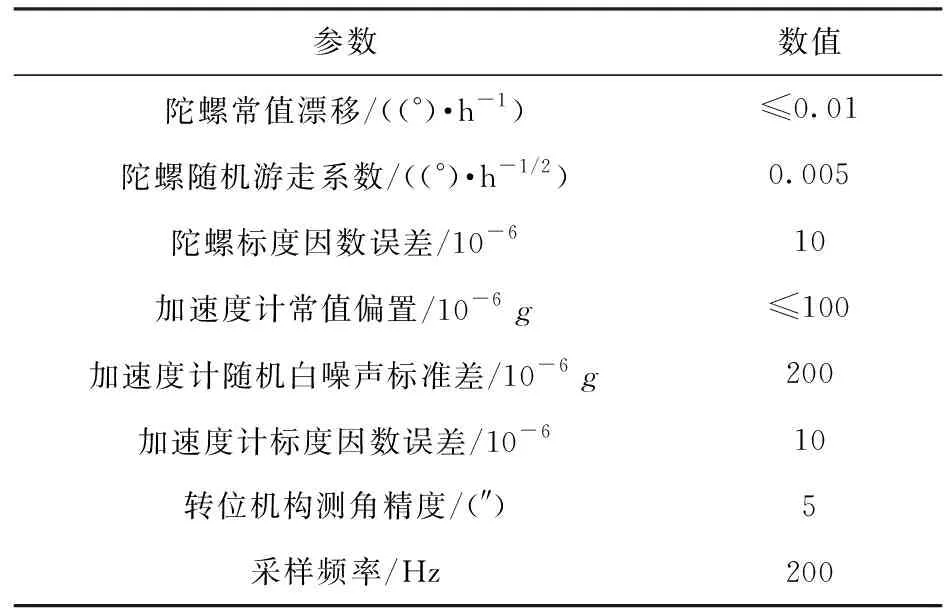
表1 單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)技術(shù)參數(shù)
在車載環(huán)境試驗中,慣導(dǎo)系統(tǒng)安裝在車輛內(nèi)部基準(zhǔn)平臺上,啟動車輛發(fā)動機,在靜止條件下利用車載試驗系統(tǒng)中全球定位系統(tǒng)(GPS)提供的速度信息進行初始對準(zhǔn)。對準(zhǔn)完成后車輛開始運動,利用GPS提供的位置信息與慣導(dǎo)系統(tǒng)輸出的位置信息進行比較,得到定位誤差。
在轉(zhuǎn)臺試驗和車載試驗中均分別進行了兩組驗證試驗,其中一組試驗中將轉(zhuǎn)位機構(gòu)停止旋轉(zhuǎn),另一組驗證試驗中啟動轉(zhuǎn)位機構(gòu),采用四位置轉(zhuǎn)停方案進行誤差調(diào)制。圖6描述了慣導(dǎo)系統(tǒng)試驗過程中各個時間段的工作狀態(tài),前3 min進行粗對準(zhǔn),采用的是慣性系解析法;然后進行精對準(zhǔn),精對準(zhǔn)時間為20 min,精對準(zhǔn)結(jié)束后,轉(zhuǎn)入到純慣性導(dǎo)航工作模式。
在實驗室轉(zhuǎn)臺環(huán)境中,當(dāng)單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)的IMU不進行旋轉(zhuǎn)時,5 h導(dǎo)航結(jié)束后的定位誤差為0.397 n mile/h;當(dāng)IMU采用四位置轉(zhuǎn)停方式進行周期性旋轉(zhuǎn)后,其5 h導(dǎo)航結(jié)束后的定位誤差為0.102 n mile/h. 表明了單軸旋轉(zhuǎn)調(diào)制能夠抵消IMU誤差對系統(tǒng)精度的影響,從而提高慣性導(dǎo)航系統(tǒng)的定位精度。轉(zhuǎn)臺試驗誤差對比曲線如圖7所示。
圖8是車載試驗路線圖,在起始點先進行初始對準(zhǔn)試驗,對準(zhǔn)結(jié)束后啟動車輛開始運行進行車載導(dǎo)航試驗,沿著某大道控制車速為10 km/h到達某處調(diào)頭繼續(xù)行進到試驗結(jié)束,共進行5 h車載導(dǎo)航試驗。
圖9為慣導(dǎo)系統(tǒng)轉(zhuǎn)位機構(gòu)靜止與轉(zhuǎn)位機構(gòu)旋轉(zhuǎn)調(diào)制時兩次車載試驗定位誤差對比曲線。
由圖9可知:系統(tǒng)不進行旋轉(zhuǎn)調(diào)制導(dǎo)航時,5 h內(nèi)位置誤差最大為2.2 n mile;當(dāng)采用四位置單軸旋轉(zhuǎn)調(diào)制方案時,5 h系統(tǒng)定位誤差最大為0.81 n mile,系統(tǒng)最終定位精度得到了很大提高。
結(jié)合轉(zhuǎn)臺搖擺試驗和車載環(huán)境動態(tài)試驗定位誤差結(jié)果可知:水平方向陀螺誤差對定位精度的影響基本被調(diào)制,系統(tǒng)試驗結(jié)果滿足初始設(shè)計指標(biāo),可以為單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)的研制提供理論與實踐指導(dǎo)。
6 結(jié)論
1)本文對旋轉(zhuǎn)式捷聯(lián)慣導(dǎo)系統(tǒng)誤差特性進行了分析,給出了旋轉(zhuǎn)調(diào)制對陀螺標(biāo)度因數(shù)誤差、安裝誤差、常值漂移和隨機誤差的調(diào)制作用,單軸旋轉(zhuǎn)調(diào)制能將與轉(zhuǎn)軸垂直方向上慣性器件的常值誤差調(diào)制成周期性分量,通過積分運算,可以消除其對導(dǎo)航定位精度的影響。轉(zhuǎn)軸方向上的標(biāo)度因數(shù)誤差會與旋轉(zhuǎn)角速度相耦合,從而會進一步放大其對導(dǎo)航定位精度的影響,因此在工程應(yīng)用中需要采取正反旋轉(zhuǎn)的方案,以抵消該項誤差。旋轉(zhuǎn)調(diào)制對安裝誤差以及隨機噪聲誤差的調(diào)制作用很小,高精度導(dǎo)航系統(tǒng)前期轉(zhuǎn)臺標(biāo)定時應(yīng)盡可能減小該項誤差。
2)給出了單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)3種轉(zhuǎn)位方式,在數(shù)學(xué)仿真環(huán)境下對其中常用的2種轉(zhuǎn)位進行了仿真驗證,指出兩位置與四位置具有同樣的旋轉(zhuǎn)調(diào)制功能,但是四位置轉(zhuǎn)停方式不需要滑環(huán),工程應(yīng)用中具有更高的可靠性。利用三軸搖擺轉(zhuǎn)臺和車載試驗系統(tǒng)對單軸旋轉(zhuǎn)捷聯(lián)慣導(dǎo)系統(tǒng)進行了靜態(tài)和動態(tài)驗證試驗,結(jié)果能夠滿足系統(tǒng)初始設(shè)計指標(biāo),具有工程參考價值。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
