火箭橇彈道測試技術研究
2018-09-20 02:10:50唐瑞姚然中
電子測試 2018年17期
唐瑞,姚然中
(航宇救生裝備有限公司, 湖北襄陽 ,441003)
1 國內外同類技術發展現狀分析
智能傳感器(Intelligent Sensor)的概念最初是由美國宇航局在研發宇宙飛船過程中提出并形成的,1978年研發出產品,是由于宇宙飛船上需要用大量的傳感器不斷向地面發送溫度、位置、速度和姿態等數據信息而產生的。智能傳感器技術是一門正在蓬勃發展的現代傳感器技術,是涉及微機械與微電子技術、計算機技術、信號處理技術、電路與系統、傳感技術、神經網絡技術及模糊控制理論等多種學科的綜合性技術。
2 火箭橇彈道測試遇到的問題
(1)系統中任意位置的某一個傳感器出現故障,其輸出的雜波會干擾整個系統,造成整個系統癱瘓;必須精確定位故障傳感器并更換新傳感器,才能保證系統正常運行。(2)無法精確定位故障傳感器位置。目前只能使用二分法,對整個進行排故檢查。(3)終端接受到的任意一個傳感器信號無法溯源。(4)遠距離信號傳輸存在時間延遲和信號嚴重衰減。
3 擬采取的研究方法及實施途徑
3.1 研究方法
目前使用的磁電測速系統其原理如下: 沿火箭橇副軌側間隔一定距離安裝雙度霍爾開關傳感器,在火箭橇橇體側面安裝一塊永磁鋼。當火箭橇運行時,永磁鋼的磁場經過一個霍爾開關傳感器,產生一個脈沖信號,利用數采器記錄下火箭橇運行過程中經過各個霍爾開關傳感器的時刻,并送至存儲器進行存儲。事后經過判讀各個脈沖的間隔時間即可得到火箭橇運行在各個霍爾傳感器之間的時間ΔT;測量相鄰傳感器之間的距離ΔS,即可計算出火箭橇經過相鄰兩傳感器之間的平均速度:ΔS~ΔT,再加上時統系統便可獲得火箭橇運行的時空位置。
測速系統沿滑軌鋪設有540支傳感器,其中老滑軌每間隔10米鋪設一支傳感器共310支,新擴建滑軌每間隔12.5米鋪設一支傳感器共230支。相鄰兩傳感器通過電纜串接,其系統結構如圖1示。
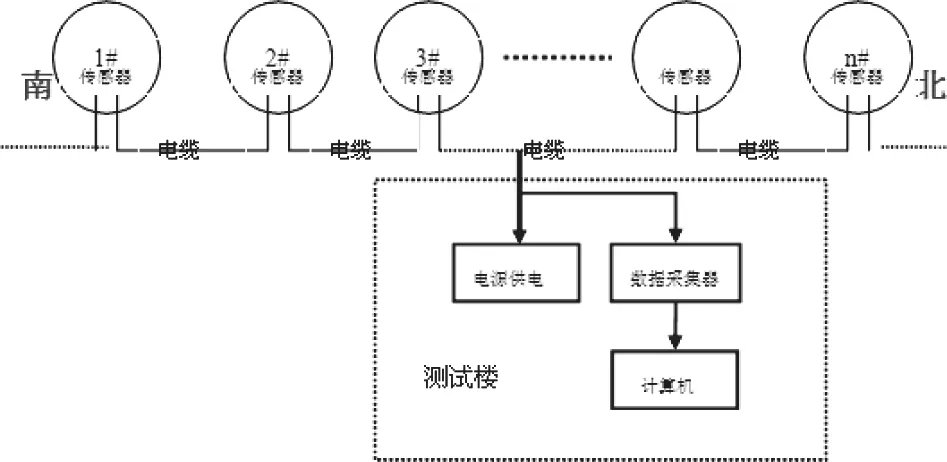
圖1 現有磁電測速系統結構圖
從圖中可以看出,傳感器的輸出采用了邏輯“或”的拓撲結構,即任何一個傳感器有輸出均會拉低整條線路的輸出。這種系統結構存在以下缺陷。
(1)線路中的任何一個傳感器發生故障,其輸出的雜波,會干擾整個系統的信號輸出,造成系統癱瘓,系統可靠性極大的降低。
(2)“或”這種拓撲結構的存在會導致在查找故障的過程中極其困難,需要耗費大量的時間尋找故障傳感器的位置。目前只能使用對線路二分法,破壞性的去尋找故障點。
(3)遠距離供電及信號傳輸問題。6公里長的通信電纜的電阻在100歐姆左右,因此如果系統中引入的30v的直流電壓供電的情況下,通信電纜在線路上的損耗將會非常之大,導致雖然傳感器有輸出,但是因為線路損耗的原因,導致整個系統中的部分傳感器的信號直接衰減殆盡,數采器無法獲取正確的輸入,而且對于系統的電源容量也是一個巨大的考驗。
3.2 人工智能技術下測速系統的系統結構
針對現有系統出現的問題,本系統將通過對傳感器的輸出信號進行數字化改造,減小其在傳輸線路上的信號衰減;通過在傳感器輸出端增加一個智能處理單元,完成傳感器信號位置編碼,從而實現輸出信號溯源問題,解決故障傳感器定位;通過光纖傳輸傳感器的輸出信號,降低系統損耗,同時將數采器的計時功能前移到處理單元。智能型磁電測速系統結構如圖2所示。
3.3 智能芯片控制單元設計
改進后的系統,通過增加并聯處理單元的方式采集現場600個傳感器信號,每個處理單元收集20個傳感器的觸發信號,利用處理單元內部的高精度晶振計算觸發時間間隔,同時保留在系統的內部,在整發試驗完成后將數據通過光纖上傳。本系統信號通過光纖進行傳遞,可以保證信號的完整性,同時在傳送數據時可將傳感器的位置信息與時間間隔信息同時編碼進行上傳,因此,如果系統中的傳感器出現故障,可通過編碼信息進行快速定位。系統的處理單元的結構示意圖如圖3所示。
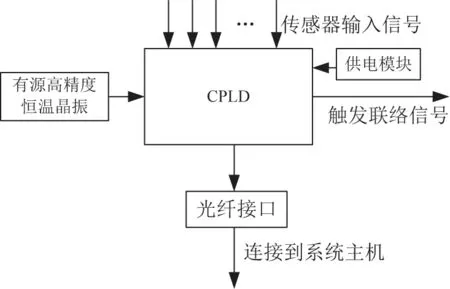
圖3 處理單元結構示意圖
3.4 智能控制單元對時間信號的處理
系統采用CPLD(復雜可編程邏輯器件)作為數據采集及處理的主要核心模塊。CPLD內部采用固定長度的金屬線進行各邏輯塊的互連,所以設計的邏輯電路具有時間可預測性。由于系統中的所有CPLD使用相同的程序,因此系統中所有觸發信號到光纖接口的延時均保持一致,在數據采集端這些延時在計算時差時會進行相減,消除了延時的誤差。
系統使用有源高精度恒溫晶振OCXO作為系統的時鐘精度保證,振蕩器頻率穩定度至少保持在1×10-9,當OCXO運行的頻率為40Mhz的時候,系統的頻率誤差保持在40M±0.04hz頻率;同時CPLD采用的是硬件描述形式的編程,保證了系統的誤差均在ns級別。
處理單元在工作過程中,CPLD的引腳監測傳感器的輸入情況,一旦輸入信號發生變化,便開始計算此輸入信號距離上個傳感器輸入信號的時鐘個數,根據時鐘個數即可判斷出兩次輸入信號之間的時間差。同時CPLD監測輸入信號的頻率,如果此輸入信號輸入超過兩次,則認為傳感器出現故障,在最后通過光纖接口發送數據時直接發送錯誤碼,便于現場工作人員查找傳感器故障。
3.5 控制單元時間統一部分的設計
由于系統傳感器采用了分組結構,因此需要通過觸發聯絡信號將兩個不同的處理單元進行聯絡。當一個處理單元的最后一個觸發信號產生后,CPLD發送觸發聯絡信號給下一處理單元,讓兩個處理單元保持同步。若因為某種原因觸發聯絡信號沒有發送至下一塊處理單元,則后續的時間基準信號以下一處理單元的第一個時鐘信號作為基準,因此可以得知,系統在傳感器故障的情況下可以識別并封鎖相應傳感器在故障情況下的輸出,同時,當處理單元出現故障時,系統僅僅部分傳感器的信號丟失,其他傳感器的信號的完整性沒有被破壞,因此,極大的提升的系統的可靠性和魯棒性,盡可能的將系統中的有用信息進行了處理。
4 結語
彈道測試系統是火箭橇試驗的核心系統,彈道測試系統數據的準確性與完整性是檢驗試驗是否成功的重要依據。為了實現和驗證智能型測速系統的科學性,通過搭建一個2-3控制單元組成的控制系統,完成對傳感器的電源控制、信號編碼、故障定位;改進現有系統的缺陷,為今后增加傳感器鋪設密度,提高測速精度做好技術儲備。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
