一種LFMCW雷達(dá)多動(dòng)目標(biāo)檢測方法
2018-09-18 11:04:10佳佳
雷達(dá)科學(xué)與技術(shù) 2018年4期
關(guān)鍵詞:信號
, , , 佳佳,
(1.南通大學(xué)電子信息學(xué)院, 江蘇南通 226019; 2.南通大學(xué)交通學(xué)院, 江蘇南通 226019)
0 引言
近年來,隨著智能交通在全球的興起,無人駕駛汽車開始成為人們研究的熱點(diǎn)。作為無人駕駛汽車所必需的高級駕駛輔助系統(tǒng)(ADAS)的關(guān)鍵技術(shù),車載雷達(dá)技術(shù)迅速發(fā)展,并受到各大汽車公司的廣泛關(guān)注[1]。線性調(diào)頻連續(xù)波(Linear Frequency Modulated Continuous Wave, LFMCW)雷達(dá)因具有結(jié)構(gòu)簡單、分辨率高、發(fā)射功率低等優(yōu)點(diǎn),被認(rèn)為是適用于無人駕駛汽車的主要車載雷達(dá)之一[2]。然而,LFMCW雷達(dá)在多目標(biāo)情況下要實(shí)現(xiàn)目標(biāo)上下掃頻段差拍信號頻譜的準(zhǔn)確配對仍然是一個(gè)難點(diǎn)。
為解決LFMCW雷達(dá)的距離-速度耦合問題,實(shí)現(xiàn)多個(gè)動(dòng)目標(biāo)頻譜的準(zhǔn)確配對,學(xué)者們提出了很多方法。目前常用的方法有MTD-速度配對法[3]、多次篩選法[4-5]和設(shè)計(jì)新的波形[6-10]等。其中,MTD-速度配對法消除了固定回波對目標(biāo)配對的影響,簡化了目標(biāo)環(huán)境,但是該方法仍然難以對具有相似反射強(qiáng)度和頻譜形狀的不同目標(biāo)進(jìn)行正確配對;多次篩選法常采用兩次篩選,得到目標(biāo)差拍信號頻譜的所有配對組合,但是其不能很好地剔除虛假目標(biāo),增加了目標(biāo)識(shí)別的難度;設(shè)計(jì)新的波形雖然可以較好解決目標(biāo)頻譜的配準(zhǔn)問題,但是其增加了信號處理的復(fù)雜度。基于目標(biāo)在上下掃頻段差拍信號頻譜的局部相似度,本文提出了一種新的多個(gè)動(dòng)目標(biāo)配對方法,實(shí)現(xiàn)了對一定速度范圍內(nèi)多個(gè)動(dòng)目標(biāo)的精準(zhǔn)檢測。
本文首先簡要分析介紹LFMCW雷達(dá)的基本原理,然后給出頻譜配對方法的詳細(xì)過程,最后是算法的驗(yàn)證及驗(yàn)證結(jié)果的分析,
1 LFMCW雷達(dá)原理
LFMCW雷達(dá)系統(tǒng)的原理框圖如圖1所示。圖中,信號波形及時(shí)序控制單元產(chǎn)生的連續(xù)三角波控制射頻信號發(fā)生器,射頻信號發(fā)生器的輸出信號經(jīng)功分器一方面?zhèn)鬏數(shù)桨l(fā)射天線使其發(fā)射微波信號,另一方面?zhèn)鬏斀o接收通道的混頻器;發(fā)射的目標(biāo)后向散射回波信號被雷達(dá)接收天線接收后,經(jīng)過混頻模塊得到目標(biāo)的基帶信號。
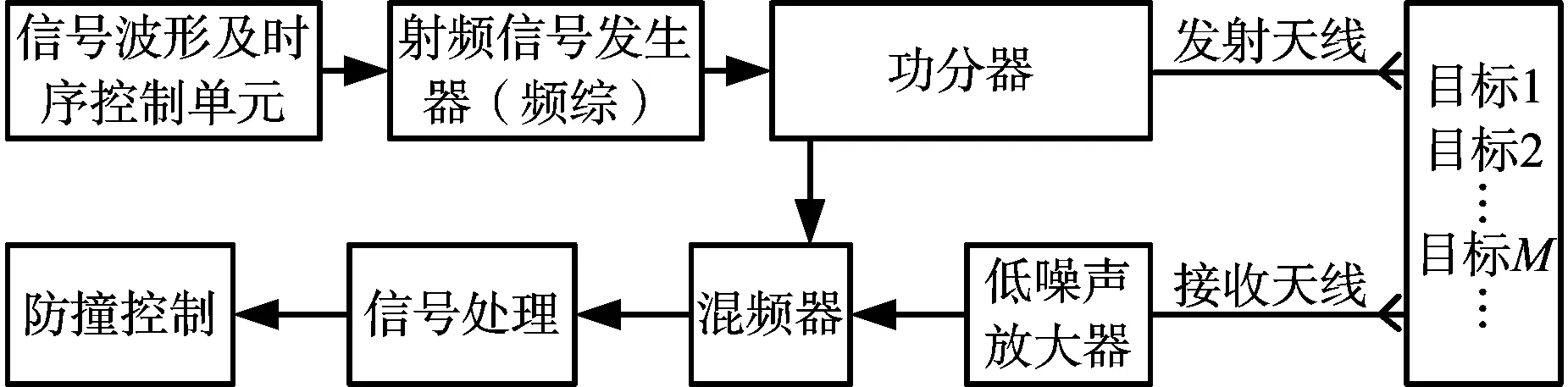
圖1 LFMCW雷達(dá)系統(tǒng)原理框圖
圖2給出了LFMCW雷達(dá)系統(tǒng)中調(diào)頻連續(xù)波發(fā)射信號、回波信號的頻率與時(shí)間關(guān)系示例。其中,圖2(a)為發(fā)射信號與回波信號的時(shí)頻關(guān)系,圖中B為掃頻帶寬,T為上下掃頻間隔,td為回波信號與發(fā)射信號之間的延遲,fd表示運(yùn)動(dòng)目標(biāo)回波信號產(chǎn)生的多普勒頻移;圖2(b)為差拍信號的時(shí)頻關(guān)系,圖中fb+和fb-分別表示上下掃段所得的差頻。
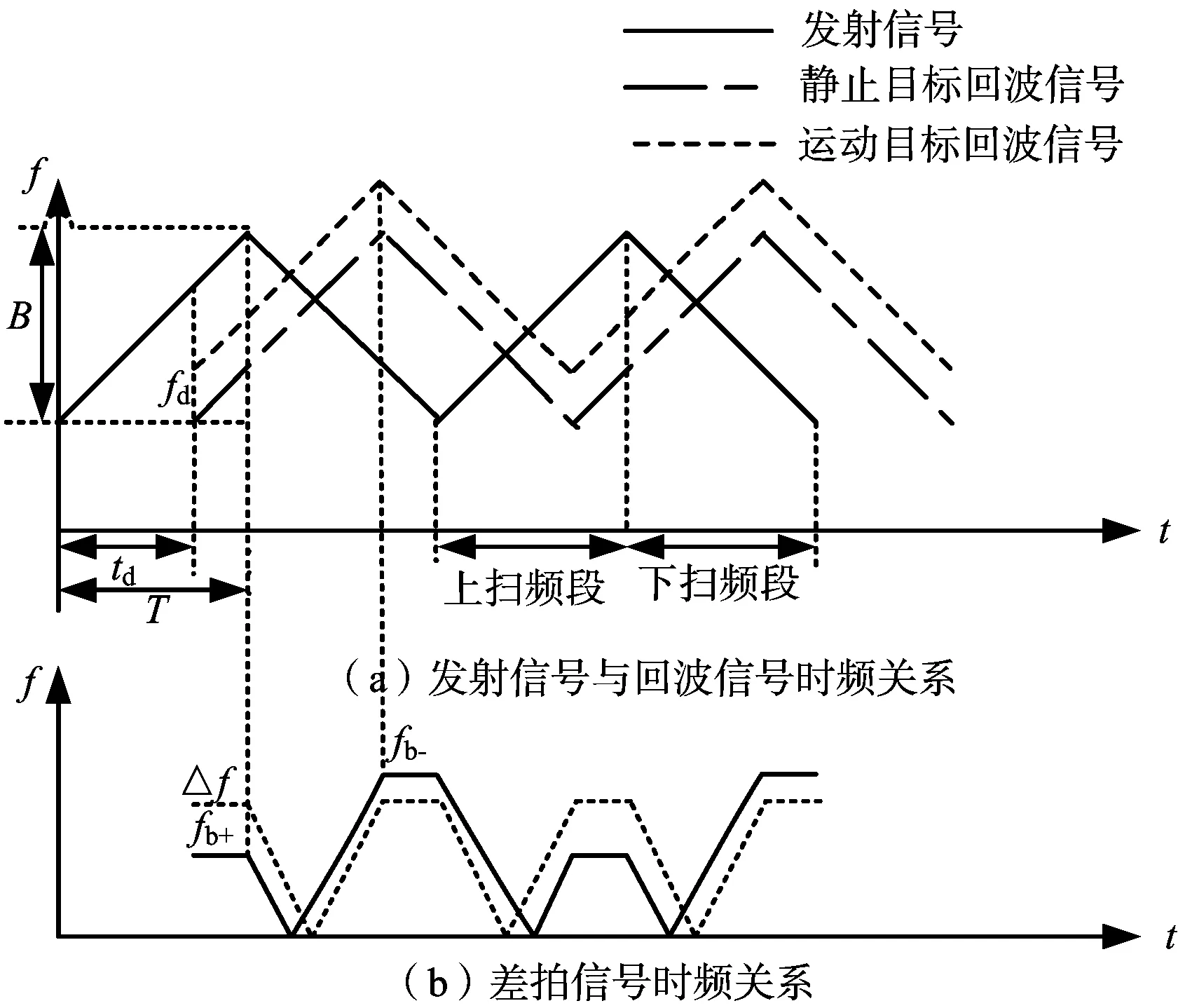
圖2 線性調(diào)頻連續(xù)波雷達(dá)信號頻率與時(shí)間關(guān)系
由圖2可見,當(dāng)目標(biāo)處于靜止時(shí),回波信號與發(fā)射信號的形狀保持一致,但兩者之間存在一個(gè)延遲td。td與雷達(dá)距目標(biāo)的距離R的關(guān)系為
td=2R/c
(1)
式中,c為光速。
若設(shè)發(fā)射信號與靜止目標(biāo)回波信號的頻率差為Δf,根據(jù)圖2(a)所示的發(fā)射信號與靜止目標(biāo)回波信號的時(shí)頻關(guān)系可得
(2)
結(jié)合式(1)和式(2),進(jìn)一步得到靜止目標(biāo)的距離R為
(3)
當(dāng)目標(biāo)處于運(yùn)動(dòng)狀態(tài)時(shí),運(yùn)動(dòng)目標(biāo)回波信號中將產(chǎn)生多普勒頻移fd,該頻移與發(fā)射信號頻率f0,目標(biāo)與雷達(dá)間的相對速度v的關(guān)系為
(4)
此時(shí),在三角波的上升沿和下降沿得到的差頻如圖2(b)所示,它們的計(jì)算式為
(5)
結(jié)合式(3)、式(4)和式(5),最終推導(dǎo)出運(yùn)動(dòng)目標(biāo)的速度v和距離R分別為
(6)
(7)
2 頻譜配對方法
2.1 相關(guān)系數(shù)
為了分析目標(biāo)上掃頻段和下掃頻段差拍信號頻譜之間的關(guān)系,假設(shè)x(f)為某一目標(biāo)的上掃頻段差拍信號頻譜函數(shù),y(f)為該目標(biāo)下掃頻段差拍信號頻譜函數(shù),若用y(f)近似表示x(f),即
x(f)≈axyy(f)
(8)
式中,逼近系數(shù)axy為實(shí)系數(shù)。定義這兩個(gè)信號的近似誤差信號e(f)為
e(f)=x(f)-axyy(f)
(9)
由式(9)可見,適當(dāng)選擇逼近系數(shù)axy可使該近似誤差信號最小,即為最佳近似。而誤差信號的二階規(guī)范量或能量(當(dāng)功率信號是為平均功率時(shí))常被用來衡量誤差信號的大小,因此,根據(jù)信號分析中著名的最小誤差能量(或均方誤差)準(zhǔn)則[11],即上述誤差信號的能量(或平均功率)最小時(shí)可認(rèn)為獲得了最佳近似,計(jì)算近似誤差信號e(f)的均方誤差為


(10)

(11)
由此,求得用y(f)表示x(f)的最佳逼近系數(shù)axy為
(12)
將此最佳逼近系數(shù)代入式(10),可以得到最佳近似下的均方誤差為
(13)
若把式(13)用原信號能量歸一化成相對誤差,則有

(14)
若令
(15)
則式(14)改寫為
(16)
式中,ρxy通常稱為y(f)與x(f)的相關(guān)系數(shù),根據(jù)積分或求和形式的施瓦茲不等式和2個(gè)信號的特性可知,0≤ρxy≤1。若兩個(gè)信號的相關(guān)系數(shù)ρxy=1,均方誤差為0,表示這兩個(gè)波形相同,為同一目標(biāo)產(chǎn)生的譜線;若相關(guān)系數(shù)ρxy=0,則無法用一個(gè)信號來近似表示另一個(gè)信號,即兩者不為同一目標(biāo)產(chǎn)生的譜線;若0<ρxy<1時(shí),則表示這兩個(gè)信號之間有一定的相似度,可以用一個(gè)信號近似地表示另一個(gè)信號,此時(shí),ρxy愈接近于1,表示近似的誤差愈小,兩個(gè)信號愈加相似,愈加可能為同一目標(biāo)產(chǎn)生的譜線。
2.2 頻譜相似度算法
理論上,同一目標(biāo)的上掃頻段和下掃頻段產(chǎn)生的差拍信號頻譜具有相同的幅度和頻率。雖然在實(shí)際應(yīng)用環(huán)境中,由于目標(biāo)運(yùn)動(dòng)起伏、天線損耗等多方面的影響,可能出現(xiàn)兩個(gè)頻譜的幅度不完全相同的情況,但同一目標(biāo)產(chǎn)生的差拍信號頻譜在上下掃頻段總是有最大的相似性,從而可以在上下掃頻段分別得到的差頻信號頻譜中找到同一目標(biāo)產(chǎn)生的譜線。因此,通過計(jì)算差拍信號頻譜的相關(guān)系數(shù),可以實(shí)現(xiàn)上下掃頻段目標(biāo)的配準(zhǔn)。
圖3給出了計(jì)算多目標(biāo)相似度的算法流程。首先,確定目標(biāo)環(huán)境,若目標(biāo)個(gè)數(shù)M=1,則為單目標(biāo)環(huán)境,直接利用式(6)和式(7)求出目標(biāo)的速度和距離,結(jié)束配對;若目標(biāo)個(gè)數(shù)M>1,則計(jì)算上掃頻段和每個(gè)下掃頻段差拍信號頻譜的相關(guān)系數(shù),如目標(biāo)第i個(gè)上掃頻段和每個(gè)下掃頻段的相關(guān)系數(shù)為ρi1…ρiM,找到最大的一個(gè)相關(guān)系數(shù)ρij,視其為同一目標(biāo)并進(jìn)行配對,以此類推,直到完成對每個(gè)目標(biāo)的配準(zhǔn);最后利用式(6)和式(7)求出目標(biāo)的速度和距離。
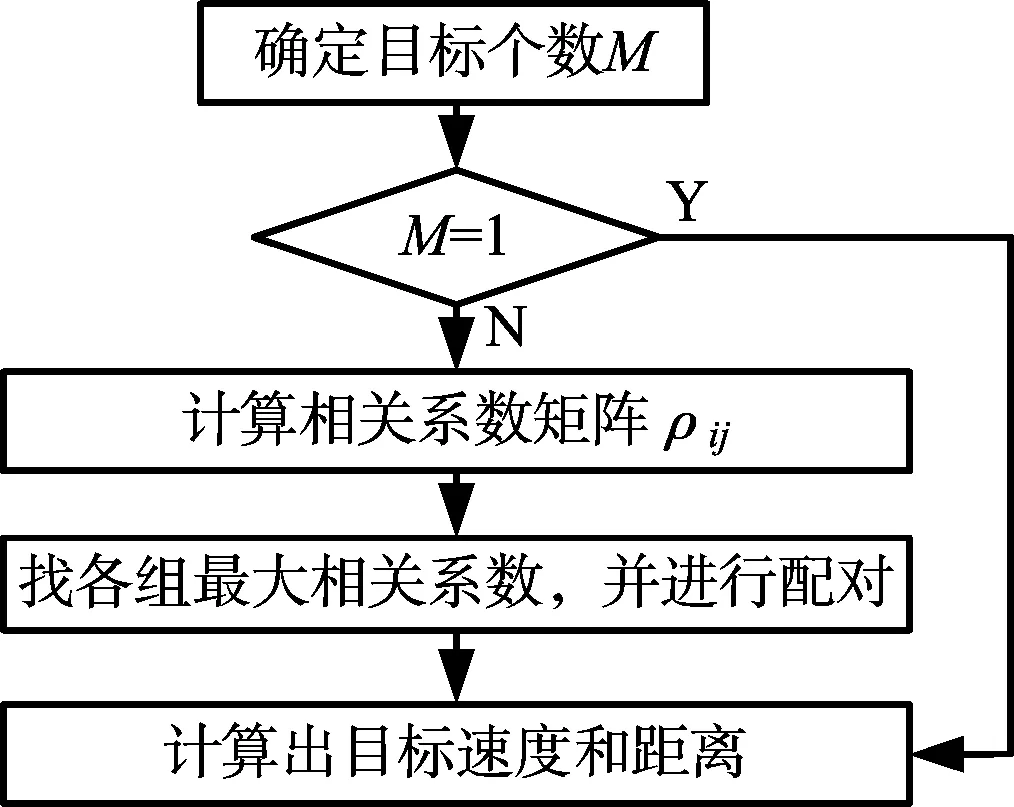
圖3 多目標(biāo)相似度算法流程
3 算法實(shí)驗(yàn)
3.1 仿真實(shí)驗(yàn)
本文主要研究中短程雷達(dá)對多個(gè)動(dòng)目標(biāo)的檢測,其探測距離小于60 m。具體的雷達(dá)信號仿真參數(shù)為:中心頻率f0=77 GHz;調(diào)頻帶寬B=600 MHz;為了取2冪級數(shù)的采樣點(diǎn)數(shù),方便后續(xù)的FFT運(yùn)算,上下掃頻間隔T為1.024 ms;調(diào)頻斜率K=B/T=5.859 4×1011,距離分辨率dR=0.250 0 m,速度分辨率dv=1.902 km/h。
假設(shè)目標(biāo)數(shù)M=4,其中,在距離為25 m(100 dR)處有兩個(gè)運(yùn)動(dòng)目標(biāo),速度分別為19.02 km/h(10 dv)和114.14 km/h(60 dv);在距離為32.5 m(130 dR)處也有兩個(gè)運(yùn)動(dòng)目標(biāo),速度同樣為19.02 km/h(10 dv)和114.14 km/h(60 dv)。圖4給出了雷達(dá)信號經(jīng)目標(biāo)反射后,上掃頻段和下掃頻段差拍信號的頻譜,由圖可見,上、下掃頻段各有4個(gè)峰值,即4個(gè)目標(biāo)在上、下掃頻段差拍信號的頻譜。圖4中,上掃頻段曲線上按照峰值的頻率由小到大分別稱為A,B,C,D,下掃頻段曲線上同樣按照峰值的頻率由小到大排列,分別稱為a,b,c,d。
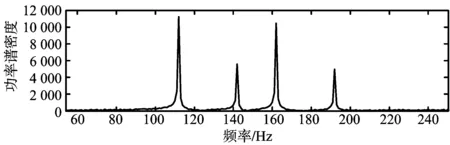
(a) 上掃頻段目標(biāo)頻譜
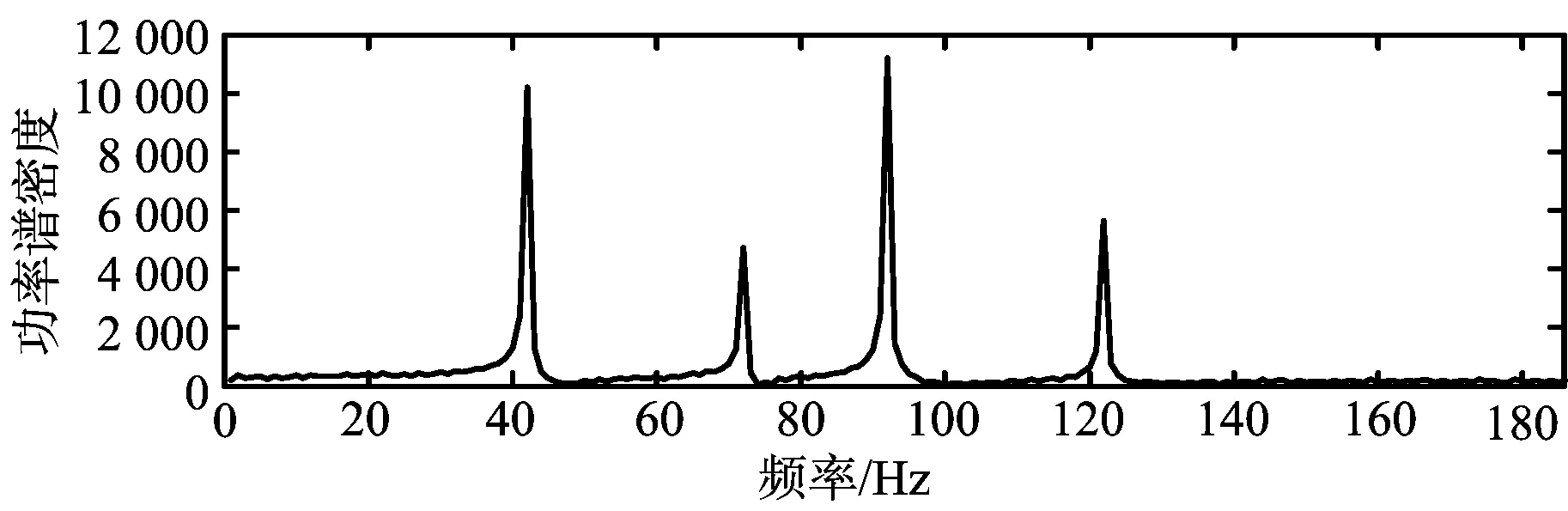
(b) 下掃頻段目標(biāo)頻譜圖4 目標(biāo)上、下掃頻段差拍信號的頻譜
根據(jù)圖3所示的相似度算法流程,計(jì)算得到上、下掃頻段差拍信號頻譜的各相關(guān)系數(shù)如表1所示。接著按照相關(guān)系數(shù)最大的原則進(jìn)行配對,配對結(jié)果為:A和c配對;B和d配對;C和a配對;D和b配對。
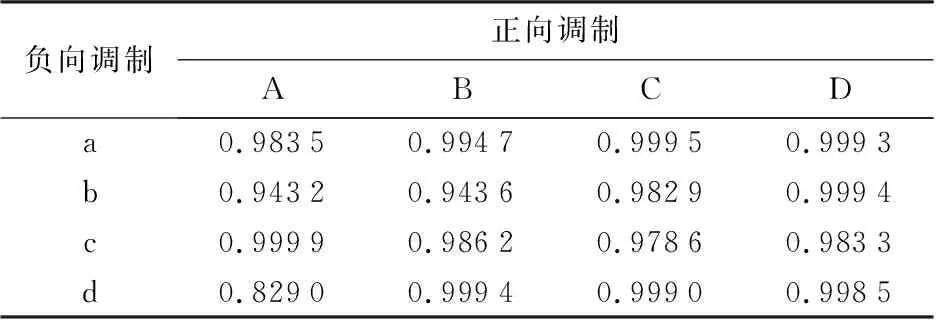
表1 差拍信號頻譜的相關(guān)系數(shù)
3.2 算法分析
選取其中的一組進(jìn)行比較,圖5給出了上掃頻段信號A分別與下掃頻段信號a,b,c,d的對比分析圖。可見,差拍信號A和目標(biāo)下掃頻段的差拍信號c的頻譜波形相似度。可以發(fā)現(xiàn)峰值A(chǔ)和峰值c的波形相似程度最大,并且從表1的數(shù)據(jù)可知,兩者的相關(guān)系數(shù)也最大,即兩者為同一目標(biāo)的頻譜,和上文配對結(jié)果相吻合。表2詳細(xì)列出了目標(biāo)距離、速度的設(shè)定值及其計(jì)算值與誤差。
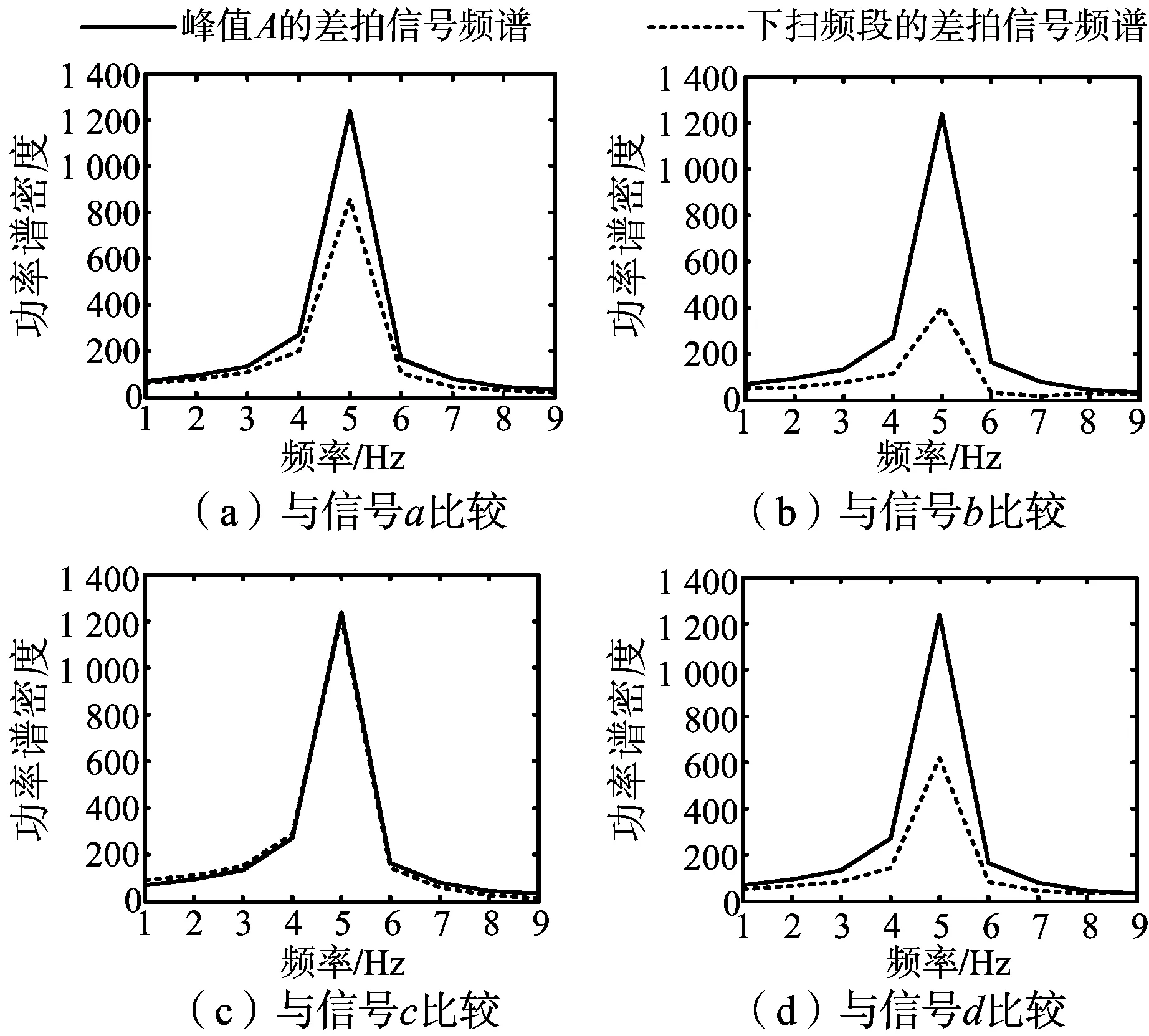
圖5 峰值A(chǔ)和目標(biāo)下掃頻段的差拍信號頻譜
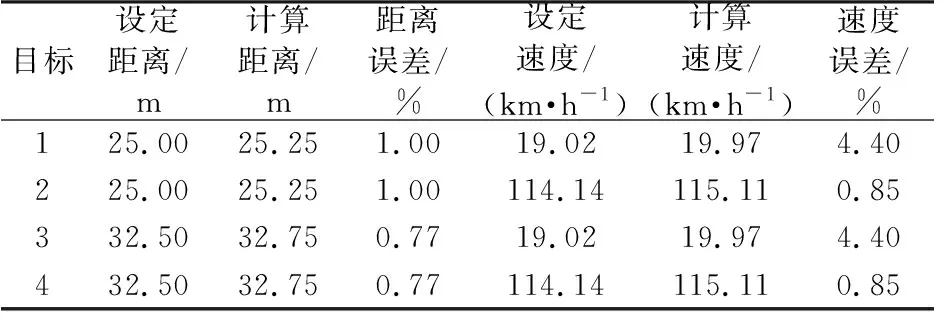
目標(biāo)設(shè)定距離/m計(jì)算距離/m距離誤差/%設(shè)定速度/(km·h-1)計(jì)算速度/(km·h-1)速度誤差/%125.0025.251.0019.0219.974.40225.0025.251.00114.14115.110.85332.5032.750.7719.0219.974.40432.5032.750.77114.14115.110.85
圖6給出了典型的調(diào)頻連續(xù)波匹配方法(菱形標(biāo)記)和本文算法(五角星標(biāo)記)對多個(gè)動(dòng)目標(biāo)檢測的結(jié)果。可見,使用典型的調(diào)頻連續(xù)波匹配算法檢測到的目標(biāo)數(shù)量為28個(gè),其中24個(gè)為虛假目標(biāo),誤檢率高達(dá)87%;而本文算法則排除了所有虛假目標(biāo),誤檢率為0。
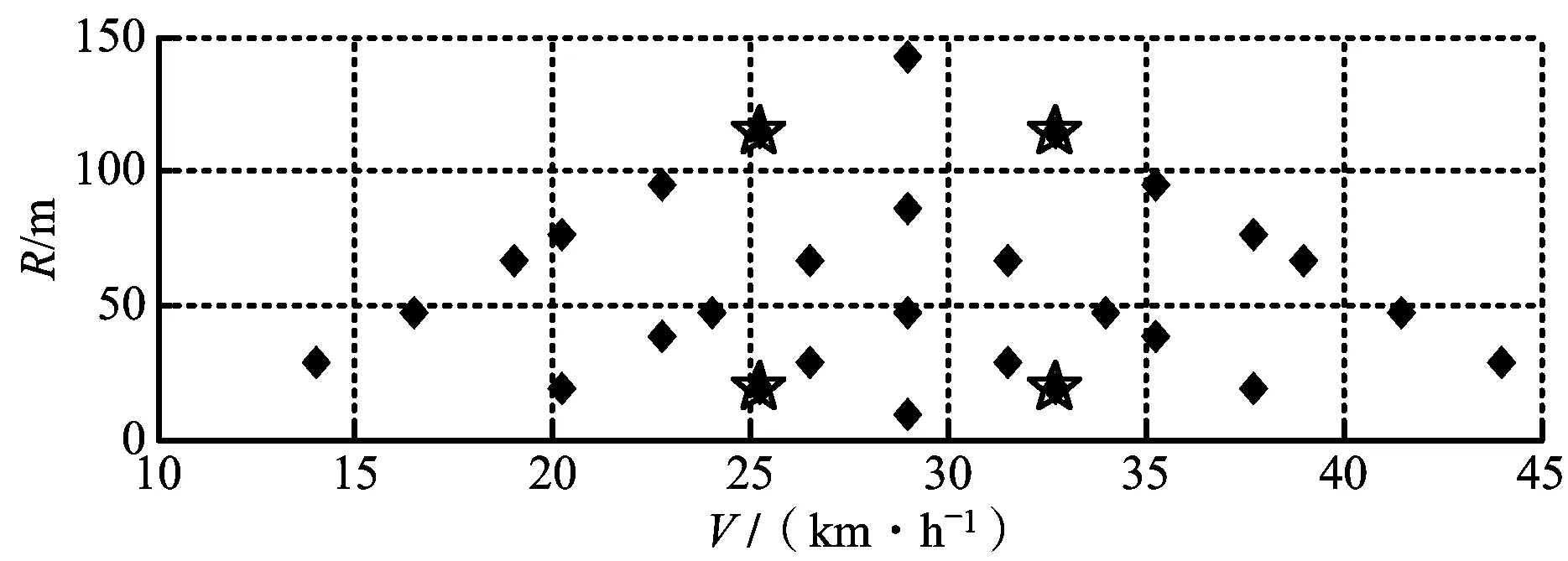
圖6 多目標(biāo)檢測仿真結(jié)果
4 結(jié)束語
應(yīng)用頻譜相似度,提出了一種新的線性調(diào)頻連續(xù)波(LFMCW)雷達(dá)目標(biāo)配準(zhǔn)方法,有效剔除了檢測中的虛假目標(biāo),避免了其固有的距離-速度耦合帶來的在多運(yùn)動(dòng)目標(biāo)情況下的檢測困難。然而,該方法僅適用于中短程距離,并在一定的速度范圍內(nèi)有效。下一步工作是進(jìn)一步拓展本文方法可使用的距離和速度,還將進(jìn)行外場實(shí)驗(yàn),通過對真實(shí)目標(biāo)的實(shí)時(shí)在線檢測與分析,在實(shí)際應(yīng)用檢驗(yàn)所提方法的有效性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
