日本KITE試驗任務綜述與啟示
2018-09-18 08:23:06張烽王小錠吳勝寶焉寧李揚
空間碎片研究 2018年2期
關鍵詞:系統
張烽,王小錠,吳勝寶,焉寧,李揚
(中國運載火箭技術研究院研究發展中心,北京100076)
1 概述
2016年12月,日本成功發射的HTV貨運飛船 (也稱鸛號貨運飛船)6號機抵達國際空間站,此次任務攜帶電動力繩系裝置,在完成主任務后,將在太空釋放系繩以對該電動力繩系技術進行在軌測試,此次在軌演示任務被稱為 “鸛號集成系繩試驗” (Konotori Integrated Tether Experiment,KITE)。但根據官方報道,該計劃后因繩系釋放裝置出現故障而中止。盡管并未達到試驗目的,但該任務的系統方案與技術路線具有較強的借鑒意義。因此,本文較為詳細地介紹了KITE任務的總體方案[1]、系統組成[2]及任務關鍵技術仿真與地面試驗驗證情況[3-4],最后總結了該任務在電動力繩系離軌技術發展領域的啟示,并對我國開展電動力繩系離軌技術發展思路提出了建議。
2 總體方案
2.1 演示方案
日本此次KITE任務的主要目的是驗證應用于空間碎片清除的電動力繩系關鍵技術,主要包括以下試驗內容:
(1)釋放約700m長的裸系繩;
(2)繩系和末端運動狀態監測;
(3)電動力產生試驗;
(4)裸系繩電荷收集試驗;
(5)電子發射器陰極電荷發射試驗;
(6)力的測量試驗。
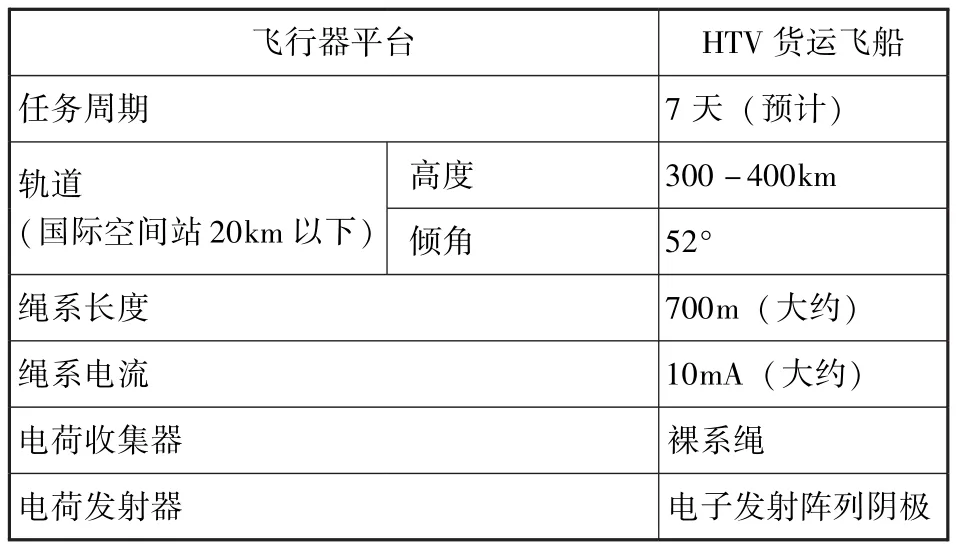
表1 KITE任務技術指標Tab.1 The specifications of the KITE mission

圖1 KITE任務原理示意圖Fig.1 The schematic of the KITE mission
整個試驗任務流程如下:
HTV貨運飛船完成向國際空間站的任務并分離后,降低到國際空間站軌道20km以下。繩系末端由安裝在HTV上的彈射裝置彈射出來,繩系末端中安裝約700m長度繩系的卷軸,繩系另一端連接HTV。繩系從卷軸緩慢釋放展開,展開過程的摩擦力有效降低末端的釋放速度,但經過足夠長的時間后,重力梯度力還是使繩系的展開速度加快,制動卷軸安裝在繩系末端,以此來降低繩系展開速度,這樣避免繩系釋放完畢時繩張力過大對繩系造成破壞。
由于科氏力以及電動力和大氣阻力產生的扭矩影響,繩系會產生明顯的振動。這種摩擦力和繩系振動狀態在地面試驗無法驗證,需要在軌進行驗證測試。繩系釋放展開的動力學特性通過HTV上的交會雷達來測量,該雷達也用于與國際空間站的交會對接,在繩系末端只要安裝發射器即可完成測量,而不需要任何電子設備。HTV上同時安裝了視覺相機來監測繩系釋放展開的過程。此次任務中,采用電子發射陣列陰極來發射繩系收集的電子,通過等離子電壓監測器來測量繩系電壓,通過地磁傳感器來測量地磁場。這些部件的供電和通信都是利用HTV上的設備完成。當繩系釋放完成后,開始測量繩系電壓、電流和電子場陣列發射控制的關系。此次任務計劃持續7天,任務完成后,繩系將被切斷,HTV按計劃進行再入過程。
考慮電動力的方向以及電子發射器安裝在HTV的位置,繩系選擇朝天頂方向釋放。繩系700m長度設計是滿足電動力指標需求以及受激光傳感器指標限制,激光傳感器用來測量HTV和末端的距離。
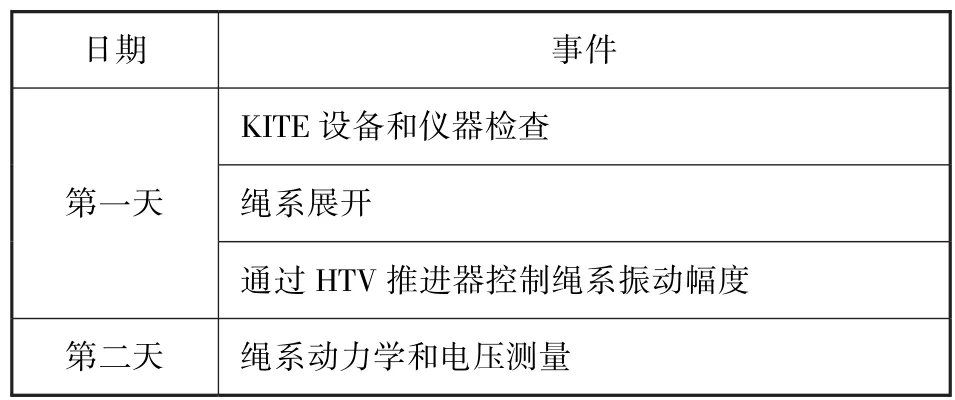
表2 KITE任務日程安排Tab.2 The time schedule of the KITE mission
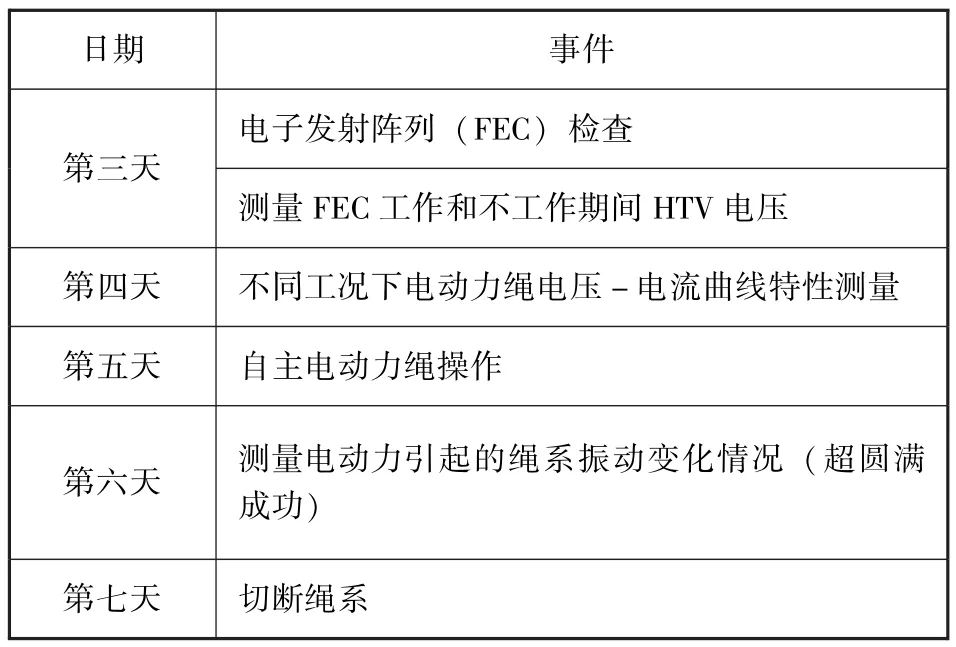
續表2
2.2 日本電動力繩系碎片清除發展規劃
日本利用電動力繩進行空間碎片清除的技術路線如圖2所示。路線圖分三步走:第一步,關鍵技術驗證;第二步,系統級驗證;第三步,空間碎片清除應用。系統級驗證任務剖面如圖3所示。最終目標是通過保護空間環境的國際合作,發展一種經濟有效的空間碎片清除系統。
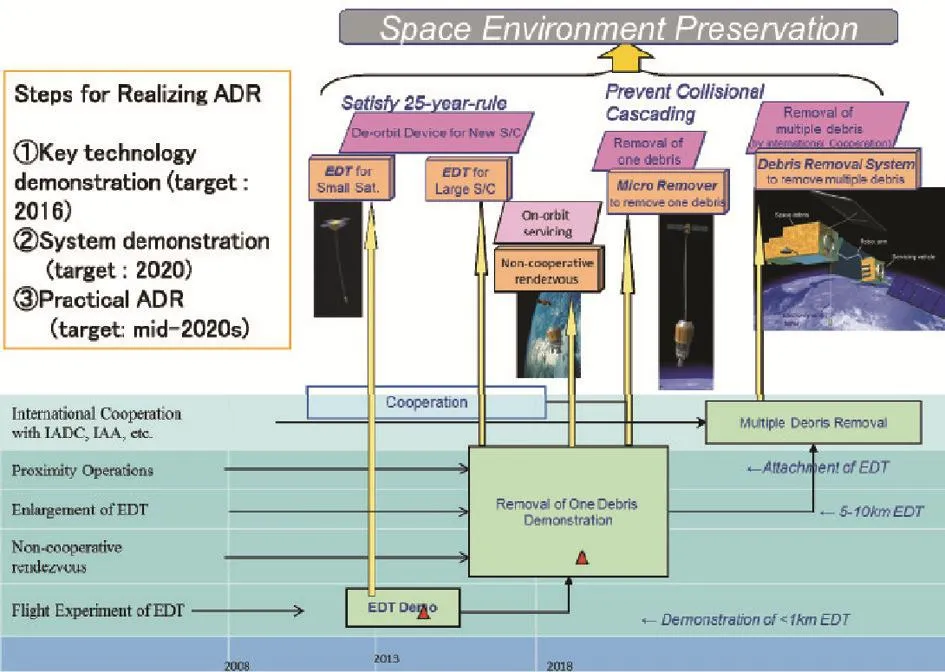
圖2 基于電動力繩的空間碎片清除的技術路線圖Fig.2 Roadmap for EDT based space debris removal
若電動力繩系被驗證能夠用于碎片離軌,和傳統的動力系統相比,電動力繩系離軌過程挑戰性要小。而且采用電動力繩不需要太多燃料,這樣可將小衛星應用于碎片清除系統。所以,日本規劃實現碎片清除系統的路線圖第一步是發展電動力繩系技術,路線圖的下一步則是發展用小衛星來清除大質量碎片的技術。如果第一步 (電動力繩系技術)得到驗證,后續將進行碎片清除系統的系統級驗證。日本同時在開展的還有非合作目標的交會對接和近距離操作技術,如運動狀態估計、繩系末端和目標的連接操作等。

圖3 電動力繩系碎片清除技術系統級驗證任務剖面圖Fig.3 Demonstration mission profile of EDT based space debris removal technology
在系統級驗證方面,日本規劃的方案是在運載火箭發射小衛星后,由小衛星將火箭末級作為清除的對象。這個小衛星在和火箭分離后,與火箭交會并接近,然后將繩系一端和火箭連接,小衛星自身作為繩系末端,將火箭末級拖曳離軌。這種小衛星將是未來碎片清除實踐應用最終目標的一種方式,會大大降低碎片清除成本。
3 系統組成
KITE的裝置和工具安裝在HTV上面的各個部位,具體如圖4所示。KITE的主要部分包括用于加速和減速制動的繩系和卷軸、末端、釋放繩系機械裝置、記錄繩系動力學特征的傳感器和相機、電子發射器、電勢感應器、磁傳感器和數據處理控制單元。
3.1 繩系釋放機械臂裝置
繩系釋放機械裝置由末端外部的發射彈簧和一個非爆炸彈射裝置組成。釋放過程由3個單獨的控制指令發出,配置3個單獨發出的控制指令是為了保證HTV飛行器的安全。釋放裝置彈射末端的初速度在1m/s左右。
3.2 繩系和卷軸
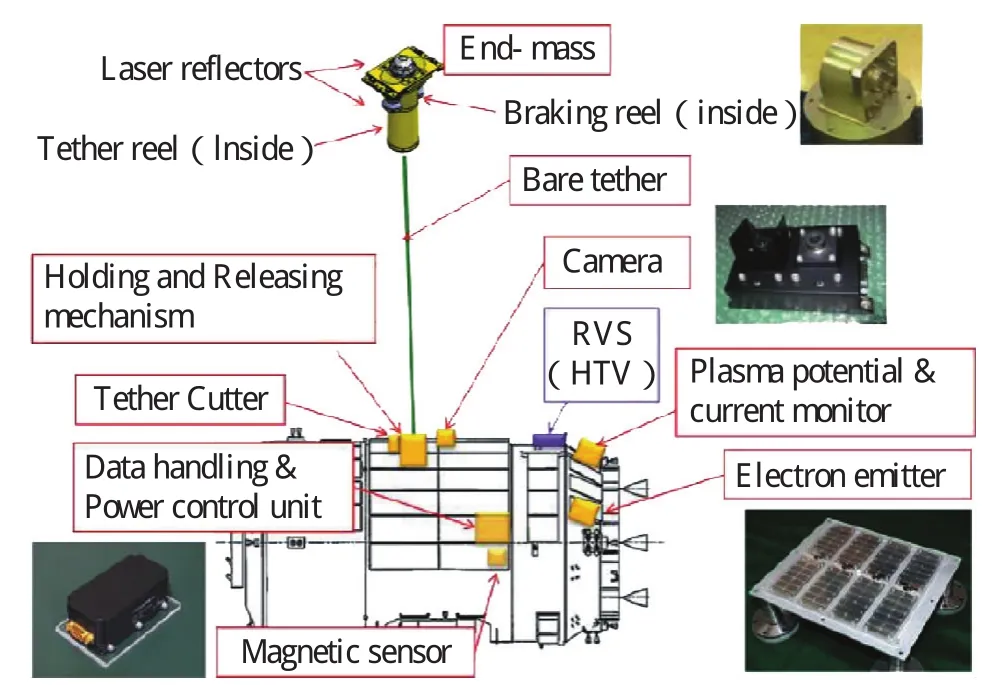
圖4 KITE任務系統組成圖Fig.4 The system components of the KITE mission
KITE繩系采用裸系繩,主要任務是從周圍等離子區吸收電子,繩系上電子流動產生電動勢,切割磁感線產生洛倫茲力。繩系總長度大約700m,且采用網狀結構,由3條線組成,每條線由鋁和不銹鋼組成。裸系繩收集空間等離子電荷,采用網狀結構來應對小碎片的影響。其實物結構及微觀結構參見圖5。
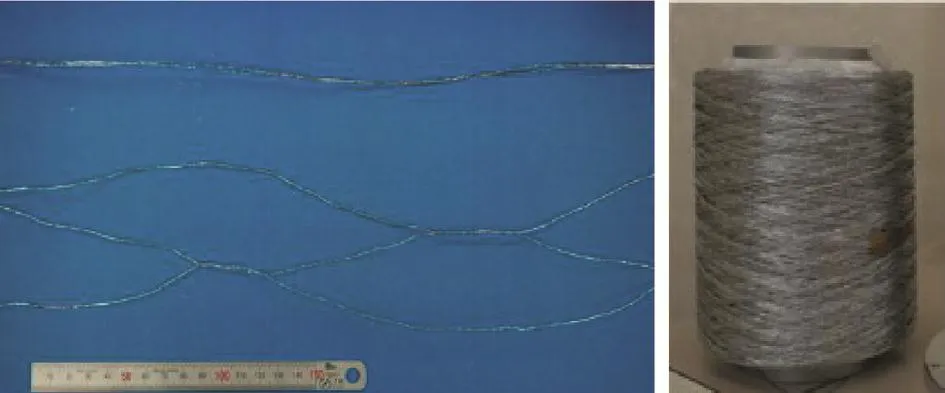
圖5 網狀繩系和卷軸Fig.5 The net tether and the reel
存儲和釋放系統由末端、末端存儲裝置和彈射裝置組成。當壓縮的彈簧被釋放后,末端便離開HTV飛行器,繩子從末端的卷軸中逐漸伸出。在繩系展開的最后階段,末端通過制動卷軸開始減速,保證展開的最后階段不會出現過多的振蕩或者回彈現象。
制動卷軸放置在末端中,繩系的最后10m卷繞在制動裝置的卷軸上。這種被動制動系統無法調節制動力,優點是簡單易行。制動力只能通過不同力的內部彈簧來改變,且大小必須通過地面測試來估計。
3.3 傳感器和相機
末端質量塊的運動通過HTV的交會傳感器來監測,該交會傳感器主要用于HTV與國際空間站的交會對接過程。為便于實施監測,需要在末端質量塊安裝激光反射器來配合。
兩個相機,包括EECMR和TSCMR,安裝在HTV上,EECMR監視彈射時末端的運動,TSCMR通過繩系上三個標記點運動來監視繩系擺動。
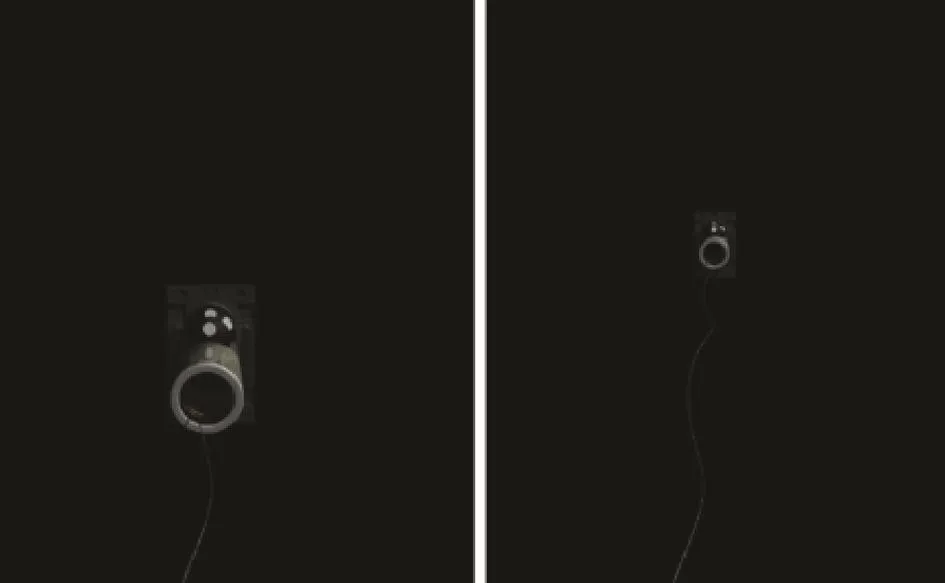
圖6 相機監視過程Fig.6 The figures inspected by cameras
3.4 電子場發射陣列
電子陣列發射陰極向空間等離子層發射電子,形成繩系電流,碳納米管材料用作電子發射器。電子場發射陣列模塊安裝在HTV的推進器模塊上,有助于電子發射與繩系的隔離。電子場發射陣列模塊由發射器 (FECH)、控制器 (FECC)和指令器 (FECG)組成。發射器用于向周圍環境發射電子,控制器向發射器提供高電壓,指令器負責向發射器提供指令。指令器在第三天設備準備好電子發射的時候打開。發射器表面是一個平行的發射極,發射時對準軌道方向,防止發射電子反彈回來造成機殼氧化。
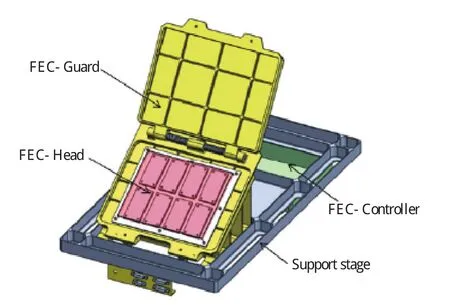
圖7 電子場發射陣列模塊Fig.7 The sketch of the FEC module
3.5 其它
繩系切斷裝置 (TCM)和存儲釋放裝置的繩系一端連接,在任務結束后切斷繩系,以有利于安全再入。LP-POM測量電壓和電動力、發射電流關系,該設計基于ATOTIE-mini,經過了在軌HTV-4驗證。磁傳感器測量磁場數據來計算電磁力和洛侖茲力。數據處理單元和電源管理單元是KITE的主計算機,負責KITE的部件 (除了TCM和LP-POM)和HTV的接口。
4 關鍵技術仿真與驗證情況
電動力繩在軌釋放的動力學特性需要在地面試驗及數字仿真中進行驗證。在地面試驗測試關鍵參數,包括展開摩擦力和制動力,通過數字仿真分析展開動力學過程。另外,針對任務過程也進行參數推導來驗證。
4.1 動力學與控制仿真
4.1.1 動力學模型
系統建模過程中,將繩系視為由粘彈性部段連接的 “珠點”模型,每一個珠點的運動模型如下:
式中,,r,μ為系統軌道角速度、軌道半徑及地球重力常數;mi為珠點質量;Q為作用于珠點的廣義力。在Gauss形式的軌道攝動方程中,考慮了洛倫茲力、空氣阻力及地球位勢引起的軌道攝動。繩系的釋放通過增加新的珠點來建模模擬。系繩的拉伸模量、阻尼比、釋放摩擦力及光熱特性等參數通過繩系地面試驗進行了測量。
在仿真中,地磁場采用了IGRF2000模型,離子密度采用了IRI2001模型,大氣密度采用了NRLMSISE-00模型,地球位勢采用了EGM96模型。對于裸系繩的電子收集模型,采用了二維軌道限制理論。仿真同時計算了繩系的溫度,因為繩系的自然長度及導熱率隨著溫度的變化而變化。
4.1.2 繩系釋放過程仿真
圖8(a)給出了釋放過程中的繩系動態變化。圖8(b)給出了釋放過程中及釋放后軌道面內天平動擺角變化。末端質量塊以1m/s彈射速度沿天頂方向釋放,釋放方向偏離軌道角速度方向20°,并偏離軌道面11.25°。由于存在Coriolis力,軌道面內天平動角度變動幅度較大。
4.1.3 HTV的俯仰角控制
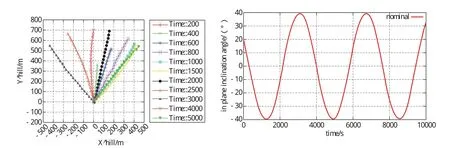
圖8 繩系釋放過程仿真結果Fig.8 The simulation results of the tether deployment process
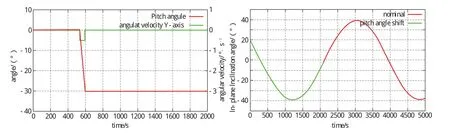
圖9 HTV的俯仰角控制仿真結果Fig.9 The simulation results of controlling HTV pitch angle
HTV的交會雷達視場為地平 (azimuth)和高程 (elevation)方向±20°,因此,當繩系天平動幅度超過20°時,末端質量塊將會超出交會雷達的視場。為了能夠持續測量到末端質量塊的位置,需要控制HTV的俯仰角以保證末端質量塊在交會雷達的視場中。圖9(a)給出了為滿足交會雷達視場約束,HTV俯仰角變化30°及角速率滿足0.5°/s時,HTV的俯仰角及角速率變化結果。圖9(b)對比了HTV采取俯仰機動及沒有俯仰機動情況下的繩系軌道面內天平動角度變化結果。繩系足夠長,并且通過末端質量塊的卷軸機構釋放。因此,繩系另一端連接HTV,并不會影響釋放過程的動特性。
4.1.4 基于HTV推力的天平動抑制
在測量到繩系天平動運行一段時間后,利用HTV的推力器對其進行抑制。如果采取合適推力序列 (當末端質量塊相對于HTV的運動與軌道角速度方向相反,推力應該為相同方向),天平動角度能夠減少,如圖10所示。在圖11(a)中,采用雙推力 (dV=0.2m/s)用于減少繩系天平動角度。通過降低和抬高軌道高度,系統的軌道高度能夠維持在常值 (如圖11(b)所示)。

圖10 用于天平動抑制的推力施加序列Fig.10 The force sequence to reject the libration
4.1.5 繩系切斷
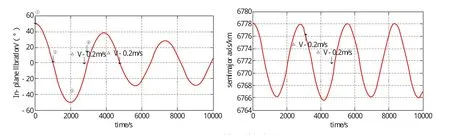
圖11 采用天平動抑制的仿真結果Fig.11 The simulation results of the libration attenuation
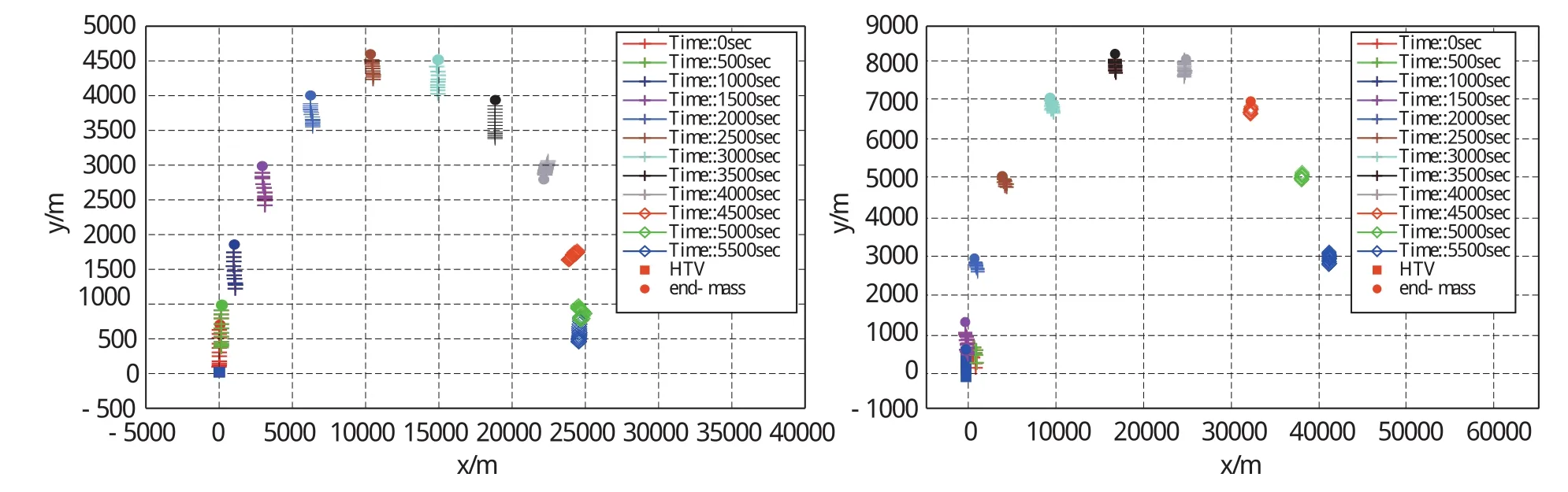
圖12 兩種情況下繩系被切斷時的繩系運動Fig.12 The tether motion after tether cutting in two cases
繩系發生旋轉會對HTV的安全再入形成潛在的障礙,因此在KITE任務完成后,HTV再入前應將系繩切斷。當繩系切斷后,末端質量塊和繩系將進入較高的軌道。當繩系在穩定且垂直的條件下被切斷,拖著繩系的末端質量塊將進入遠地點比原來高5km的軌道,如圖12(a)所示。而當繩系在天平動的情況下被切斷時,末端質量塊的軌道遠地點將會是兩倍,如圖12(b)所示。這也是KITE任務在ISS軌道下方20km處進行的原因,為了防止繩系切斷時會出現意外。
4.2 地面試驗驗證情況
4.2.1 釋放阻尼地面試驗測試
(1)繩系自由落體測試。
繩系自由落體測試用于確定在釋放終止和重啟時刻的繩系行為。試驗配置如圖13所示。繩系卷軸懸掛于裝置內部,且接口向下,同時與高靈敏度力傳感器連接。系繩通過離地1.5m處以自由落體方式釋放。
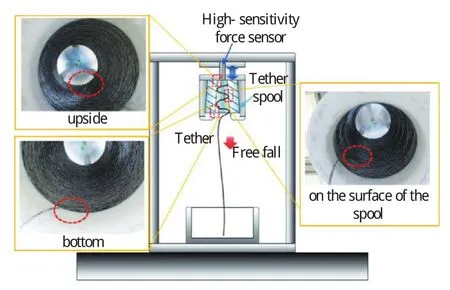
圖13 繩系自由落體試驗配置Fig.13 The free-falling experiment device
如圖14所示,根據仿真結果,1.5m長的繩系拉出后,釋放速度約為4-5m/s,預計比KITE任務在軌得到的速度大。
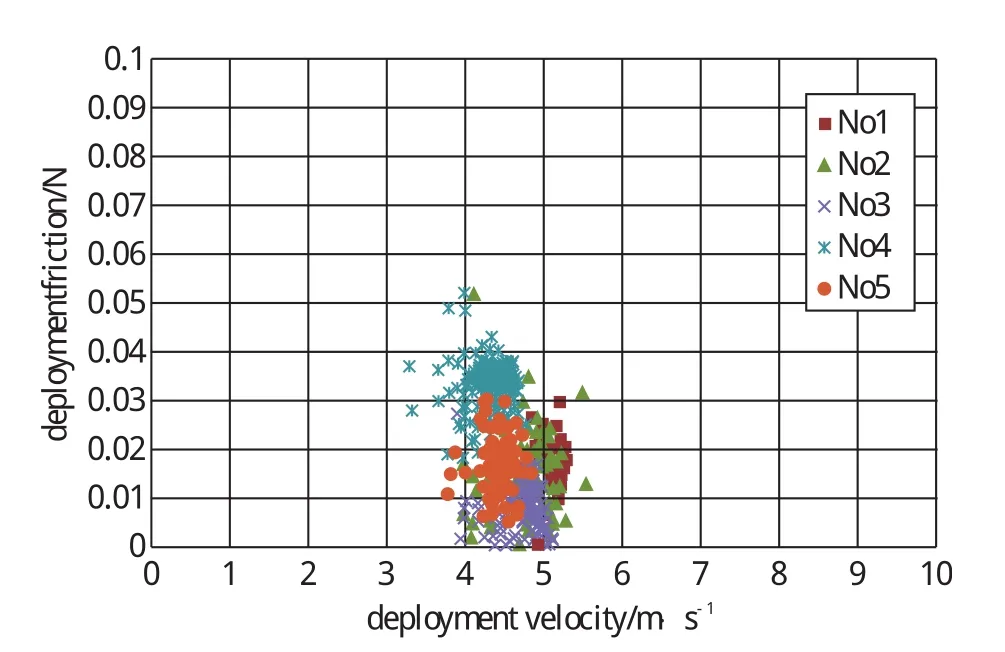
圖14 自由落體形式下的繩系釋放速度 (5組工況)Fig.14 The tether deployment velocity in the free-falling case
研究發現,如果繩系發生卡頓,繩系釋放會終止。通過對繩系施加足夠的張力,可以重新開始釋放。所施加的張力需要大于釋放摩擦力。在地面試驗中,所測得用于重新釋放繩系的最大張力為0.24N,如圖15所示。
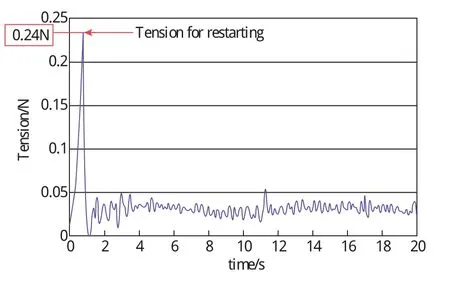
圖15 繩系張力監測結果Fig.15 The measured tether tension variations

圖16 地面試驗配置圖Fig.16 The ground test configuration
(2)測量釋放摩擦的繩系釋放試驗。
試驗配置如圖16(a)和圖16(b)所示。纏繞裝置用于實現繩系從卷軸的恒速釋放。作用于高靈敏度力傳感器 (與卷軸裝置連接)的外力能夠以釋放摩擦力的形式被測量到。通過調節纏繞裝置的速度可以控制繩系的釋放速度。圖17給出了仿真結果。
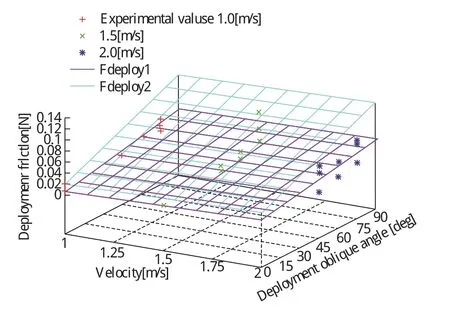
圖17 釋放摩擦力與釋放速度及釋放角度的關系圖Fig.17 The relationship among the release friction force,the deployment velocity and the deployment angle
4.2.2 繩系制動裝置的地面測試
繩系制動裝置試驗配置圖如圖18(a)所示。制動裝置采用懸掛方式,而且與高靈敏度力傳感器連接。當纏繞裝置以恒定速度從制動裝置牽拉繩系,能夠測量到制動裝置產生的外力。釋放速度考慮設置為0.5m/s、1.0m/s及2.0m/s。圖18(b)給出了仿真結果。
5 啟示與建議
5.1 啟示
(1)電動力繩具有極為廣闊的空間應用前景。
以KITE計劃為代表的電動力繩系離軌技術及關鍵技術驗證已逐漸受到國內外航天大國的關注,目前主要應用背景就是空間碎片清理。事實上,空間碎片清理已成為世界航天界非常關注的重大課題。有計算結果表明,僅通過碎片軌道的自然衰減使碎片及失效航天器離軌通常耗時極長,因此迫切需要開發低耗高效的碎片離軌、清除技術。目前主要有推力離軌、空間機器人離軌等方法,但這些方法都存在耗能大、成本高的缺點,而基于電動力繩的離軌技術能夠彌補這些缺點,能夠有效降低推進劑消耗,并實現對太空垃圾執行碎片及失效航天器的清理。
另一方面,根據電動力繩的工作原理,電動力繩不僅可以實現離軌,還可以通過添加額外的電源裝置,實現航天器的推進。因此,電動力繩在空間應用領域存在著極為廣闊的應用前景。
(2)空間繩系動力學十分復雜,需要通過仿真分析與地面試驗開展深入研究。
空間電動力繩的應用是一個探索性極強的研究領域,涉及許多尚待解決的重要科學問題,即使結構形式最為簡單的電動力繩系統,其動力學及控制問題也十分復雜。由于系繩具有柔性大、阻尼小等特點,當其被置于空間環境并與航天器耦合時極易產生一系列復雜的天平動及振動,同時,電-力耦合作用也可能使系統姿態運動能量不斷增加而導致系統失穩。因此,需要通過理論研究、仿真分析及地面試驗等手段對繩系的動力學行為研究透徹。

圖18 繩系制動裝置的地面測試配置與結果曲線Fig.18 The test results of the tether braking device
(3)降低控制算法的復雜性,提高機構的可靠性。
KITE計劃中,其繩系釋放及制動過程通過簡單的硬件機構設計實現,并不存在控制行為,本質上屬于被動釋放過程。這種方式能夠有效地避免復雜的飛行控制軟件帶來的系統低可靠性,同時通過硬件機構的可靠性確保繩系的可靠釋放。盡管最終在軌試驗由于釋放裝置的故障而終止,但這種 “輕算法,重機構”的設計研制思路值得借鑒。進一步,在機構巧妙設計的基礎上,需要大量數值仿真及地面試驗確保機構的可靠性。
(4)在軌試驗盡可能采用搭載試驗,并利用飛行器已有技術及單機。
KITE計劃通過搭載HTV-6開展,并大量使用了HTV的裝置,如交會雷達、推進裝置及電源等裝置,避免了飛行器及相關裝置的重新研制,大大降低了研制周期及費用,使研究團隊聚焦于關鍵技術攻關,顯著提高了研究效率。受啟發于此,新技術的驗證,應盡可能采取搭載方式,并對成熟飛行器進行適應性改進實現。
5.2 建議
空間電動力繩系統是一個探索性極強的研究領域,由于系統具有電-力耦合、強非線性、大變形等特點,導致當前研究多局限于簡化模型、近似方法、數值算例等方面,與真實空間環境存在較大差異。本文通過對KITE計劃的研究,對我國開展電動力繩系離軌技術發展思路提出如下建議:
(1)電動力繩系統屬于多物理場耦合系統,電-力耦合、時變參數、軌道-姿態、環境攝動等使系統具有高度非線性和復雜性,需要深入揭示電動力繩系統的非線性動力學行為。
(2)亟需加強空間電動力繩系統的完備地面試驗研究,尤其加強對 “裸系繩”電子采集技術的試驗研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
