歐洲的空間碎片清除技術發展及其啟示
2018-09-18 08:22:58焉寧唐慶博陳蓉李揚
空間碎片研究 2018年2期
焉寧,唐慶博,陳蓉,李揚
(中國運載火箭技術研究院研究發展中心,北京100076)
1 引言
空間碎片,是指人類在空間進行活動時產生的各種廢棄物及其衍生物。特別是執行完發射任務的運載火箭末級/上面級、失效失控航天器等大尺寸目標,或者大量潛在的退役小衛星和衛星星座,將嚴重威脅著有限的空間軌道資源和在軌運行航天器的安全,因此備受人們關注[1]。有必要對低軌大型失效航天器實施主動離軌、受控再入,降低其再入大氣層未能完全燒毀帶來的威脅和隱患,從而保障地面生命財產的安全。
自從2012年起,歐洲空間局 (ESA)的 “清潔太空” (Clean Space)倡議主動系統地考慮了全生命周期的空間活動,包括從早期的概念設計到任務壽命結束,甚至考慮如何清除空間碎片。“清潔太空”倡議有三個分支[2],主要包括ecodesign(通過生態設計降低對人類的影響)、cleansat(通過衛星設計減少空間碎片)和e.deorbit(通過主動清除技術實現空間碎片離軌)。
本文重點結合 e.deorbit、RemoveDEBRIS等計劃,對歐洲在此方面的技術進展進行梳理和總結,并對我國空間碎片減緩與主動清除技術發展思路提出了建議。
2 歐洲的空間碎片清除技術任務
2.1 e.deorbit任務
e.deorbit的任務目標是移除近地軌道保護區域內歐洲航天局自有的大型空間碎片 (比如廢棄衛星ENVISAT),以減少太空垃圾所造成的問題。按照此目標,e.deorbit任務共分解為6個步驟,即發射入軌、進入指定LEO軌道測試、變軌調相至目標軌道、與目標交會、捕獲目標、使目標離軌[3]。早期設想的空間碎片捕獲及清除手段主要包括:機械臂、夾持機構/觸須、飛網、離子束、安裝太陽帆、安裝推進模塊等,如圖1所示。
2012-2014年,開展了以空間碎片服務再定向方法的主動清除研究,準備采用歐洲運載火箭 “織女星”的上面級作為e.deorbit捕獲系統平臺,實施了e.deorbit計劃的階段A研究工作。
2014年12月,歐洲空間局 (ESA)與德國宇航中心 (DLR)就碎片主動清除在軌演示驗證(IOD)聯合任務簽署了諒解備忘錄[4]。DLR已經開展了多年的在軌服務任務研究,如DLR的DEOS計劃。
2015年,ESA從軌道上移除太空垃圾的e.deorbit任務進入階段B1,開展任務設計工作。在2016年12月舉行的歐洲部長會議上積極推動了e.deorbit任務,列入了下一次部長會議的議程,但最終決定是否能夠獲得批準是在2019年,預計2024年發射并執行任務[5]。目前制定的具體任務計劃為:
(1)2024年1月由歐洲運載火箭 “織女星”改進型VEGA-C發射升空,并在300km的圓軌道試運行,通過軌道轉移及調相至目標軌道;
(2)2024年2月,采用先進圖像處理技術實施目標監視;
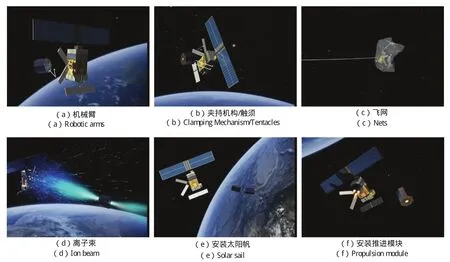
圖1 擬采用的空間碎片捕獲及清除技術方案示意圖Fig.1 Schematic of space debris capture and removal techniques
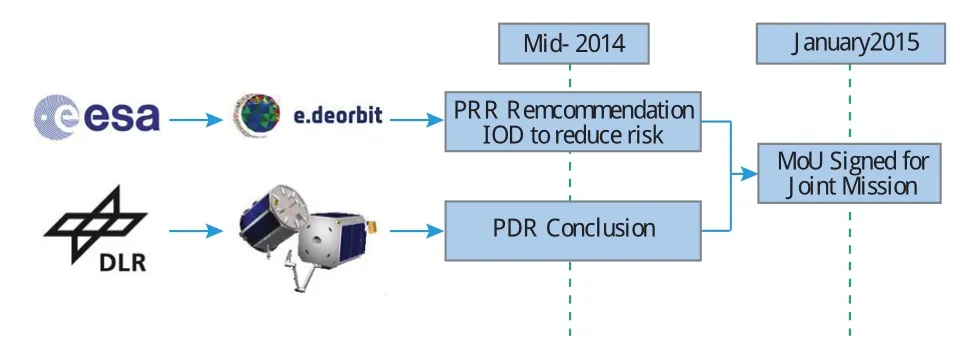
圖2 ESA與DLR之間的空間碎片主動清除在軌驗證諒解備忘錄Fig.2 MoU between ESA and DLR for an ADR in-orbit demonstration
(3)2024年3月,采用復雜GNC技術實施交會和同步運動,并采用創新的機器人技術捕獲目標 (如機械臂、飛網、魚叉等機構),然后實現組合體穩定;
(4)2024年4月,實施離軌處置。
2.2 RemoveDEBRIS任務
碎片清除任務 (RemoveDEBRIS Mission)是歐盟框架7(European Union Framework 7)的研究項目,為耗資1130萬歐元的低成本任務。該任務旨在驗證碎片主動清除關鍵技術,包括在真實的太空環境下使用飛網、魚叉、拖拽帆以及基于視覺的導航技術,原計劃在2016年發射。但根據目前的實際情況,擬定于2018年4月通過獵鷹-9運載火箭發射,用于技術驗證的衛星將在國際空間站上釋放。母星約120kg,拖拽帆展開面積達10m2,模擬的碎片目標為立方星,每顆重約3kg[6]。
RemoveDEBRIS任務的第一項試驗是利用飛網捕獲太空碎片目標。首先從演示平臺上發射第一顆立方體衛星DebrisSat 1,然后衛星可展開裝置充氣,形成模擬碎片目標,演示平臺將發射飛網捕獲目標,并切斷飛網,如圖4(a)所示。隨后開展第二項試驗,從演示平臺上伸展出十字靶標,然后發射自帶的魚叉命中靶標,如圖4(b)所示。接著開展第三項試驗,釋放第二顆立方體衛星DebrisSat 2,使用平臺上的視覺導航設備對空間碎片進行觀測和成像,如圖4(c)所示。最后開展第四項試驗,從演示平臺上伸展出機構,然后展開制動帆,促使衛星加速脫離軌道,并在大氣層中燒毀,如圖4(d)所示。
2.3 DEOS任務
空間系統演示驗證技術衛星 (TECSAS)任務是由歐洲宇航防務集團空間運輸公司聯合德國宇航中心 (DLR)提出的,并與俄羅斯聯邦航天局、加拿大航天局聯合開展的一個研究項目,旨在演示驗證空間機器人在軌服務的可行性和技術的成熟性。項目于2006年結束之后,DLR繼續開展了名為 “德國在軌服務任務”(DEOS)的計劃,重點對LEO軌道非合作目標的交會、捕獲和離軌等技術進行了研究。DEOS計劃攜帶七自由度機械臂,臂展4.2m,機械臂設計為能夠捕獲空間翻滾目標,單軸角速度不超過 5°/s,捕獲位置為 ENVISAT的星箭對接環[7]。
2.4 CleanSpace One衛星
2015年7月,瑞士洛桑聯邦理工學院研究人員公布了 “太空清潔一號”(CleanSpace One)衛星捕獲目標的模擬動畫。目前,該衛星已經通過原理樣機研制階段,下一步是開發工程樣機,計劃最早于2018年發射升空。

圖3 e.deorbit任務最新方案設想圖Fig.3 Artist’s concept of the e.deorbit mission
“太空清潔一號”衛星第一個清理目標是2009年瑞士發射的一顆衛星,將使用精確制導與控制系統進入近地軌道,利用相機識別太空垃圾,并接近目標,之后將其捕獲。 “太空清潔一號”衛星選擇了類似 “吃豆子”(Pac-Man)游戲的捕獲方案,采用一個網狀結構張開,在捕捉目標后閉合。這種方案能夠提供比爪子和人造機械手更大的運動包絡空間。成功捕捉到太空垃圾后,“太空清潔一號”衛星將攜帶太空垃圾一起在地球大氣層燃燒殆盡[8]。
3 歐洲的空間碎片清除技術路線圖
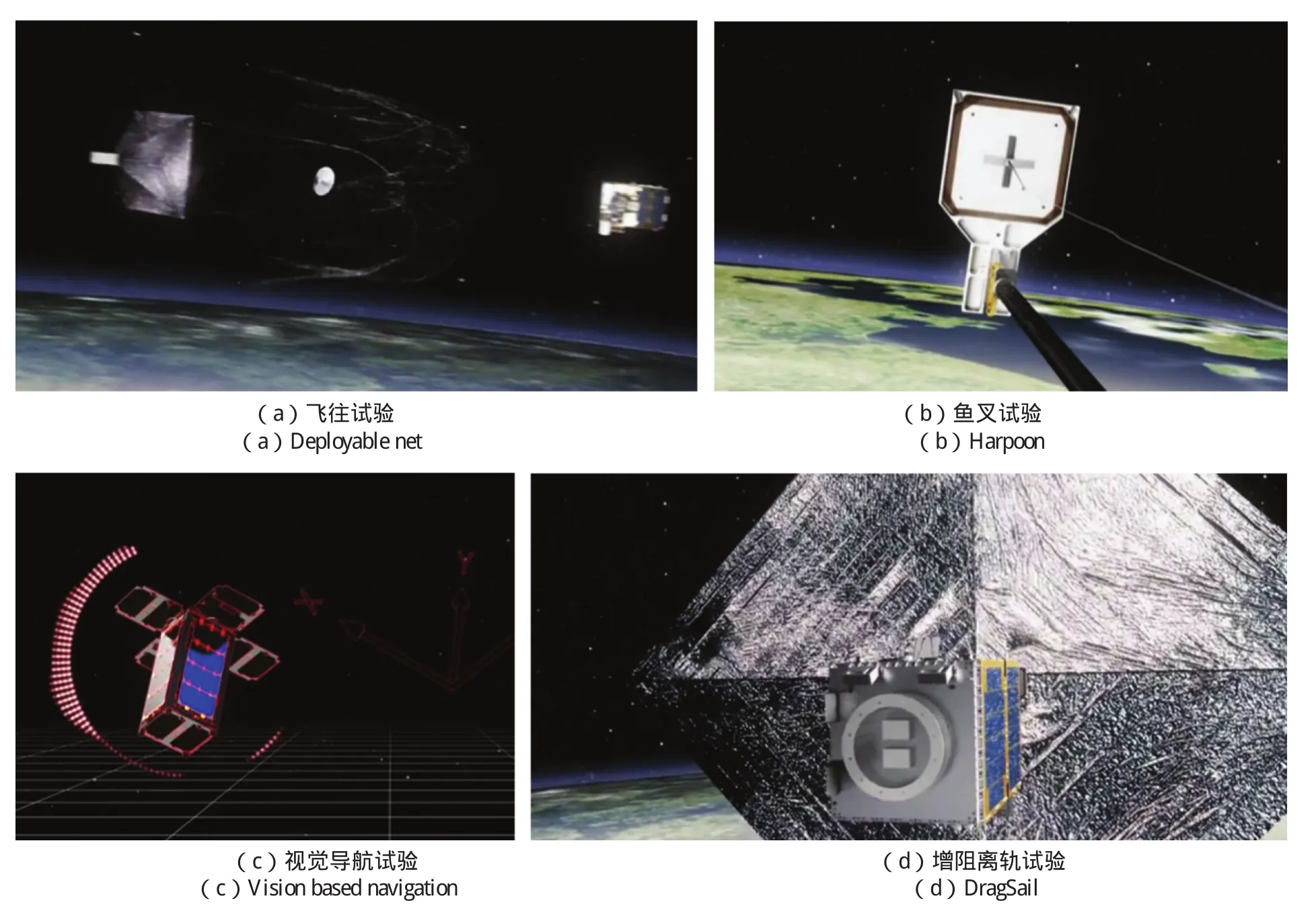
圖4 RemoveDEBRIS任務方案示意圖Fig.4 RemoveDEBRIS mission demonstration
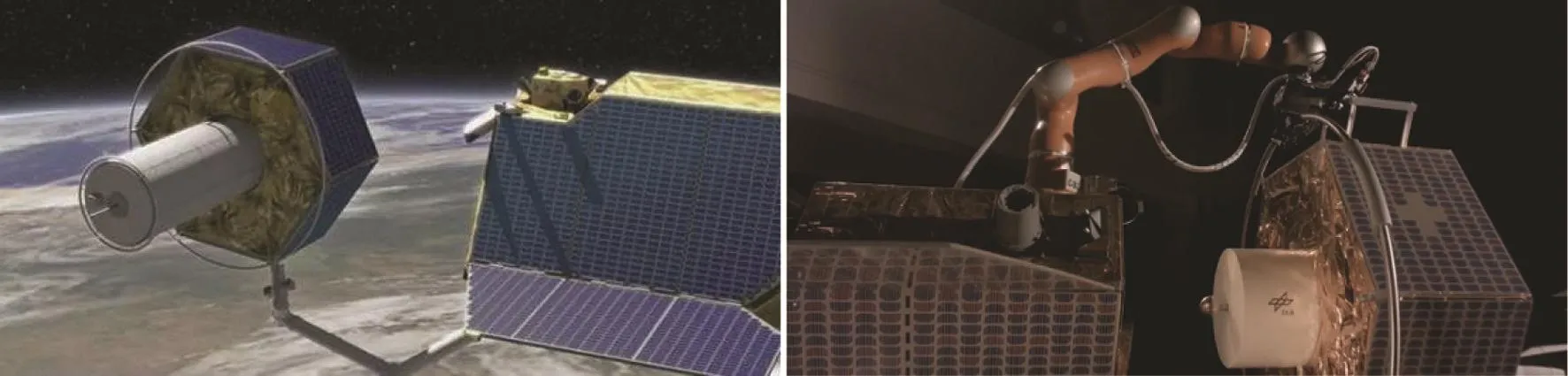
圖5 DEOS計劃及地面試驗Fig.5 DEOS mission and ground test
歐空局 “清潔太空”團隊 (Clean Space Team)于2013年9月份發布了空間碎片減緩的總路線圖,表明了e.deorbit、DEOS和CleanSpace One等項目之間的關系[9]。該團隊根據大眾對環境問題以及對空間開發的可持續關注,希望通過采取行動,將威脅與挑戰轉化為機遇,并提出了倡議的目標是通過保護環境來保證未來的空間活動。
ESA在其2015年底發布的e.deorbit實施計劃中給出了系統研究、剛性捕獲機構、柔性捕獲機構、GNC及電子設備的詳細發展路線圖,其中的系統研究路線圖如圖8所示。
ESA于2012年開展了階段A(見圖7)的協同設計實施工作,提出了相應的研究成果,并給出了夾持機構捕獲和飛網捕獲的初步方案[10]。
(1)夾持結構方案,如圖9(左)所示:
1)夾持機構+推桿
2)需要機械臂
3)VEGA運載火箭發射 (1590kg)
4)化學推進,2個425N噴管,總質量的52%為推進劑
5)激光雷達、遠距離和近距離相機、反作用飛輪+推力器
6)受控再入
(2)飛網方案,如圖9(右)所示:
1)飛網射向目標

圖6 CleanSpace One計劃及捕獲網兜地面樣機Fig.6 CleanSpace One and capture net ground mockup
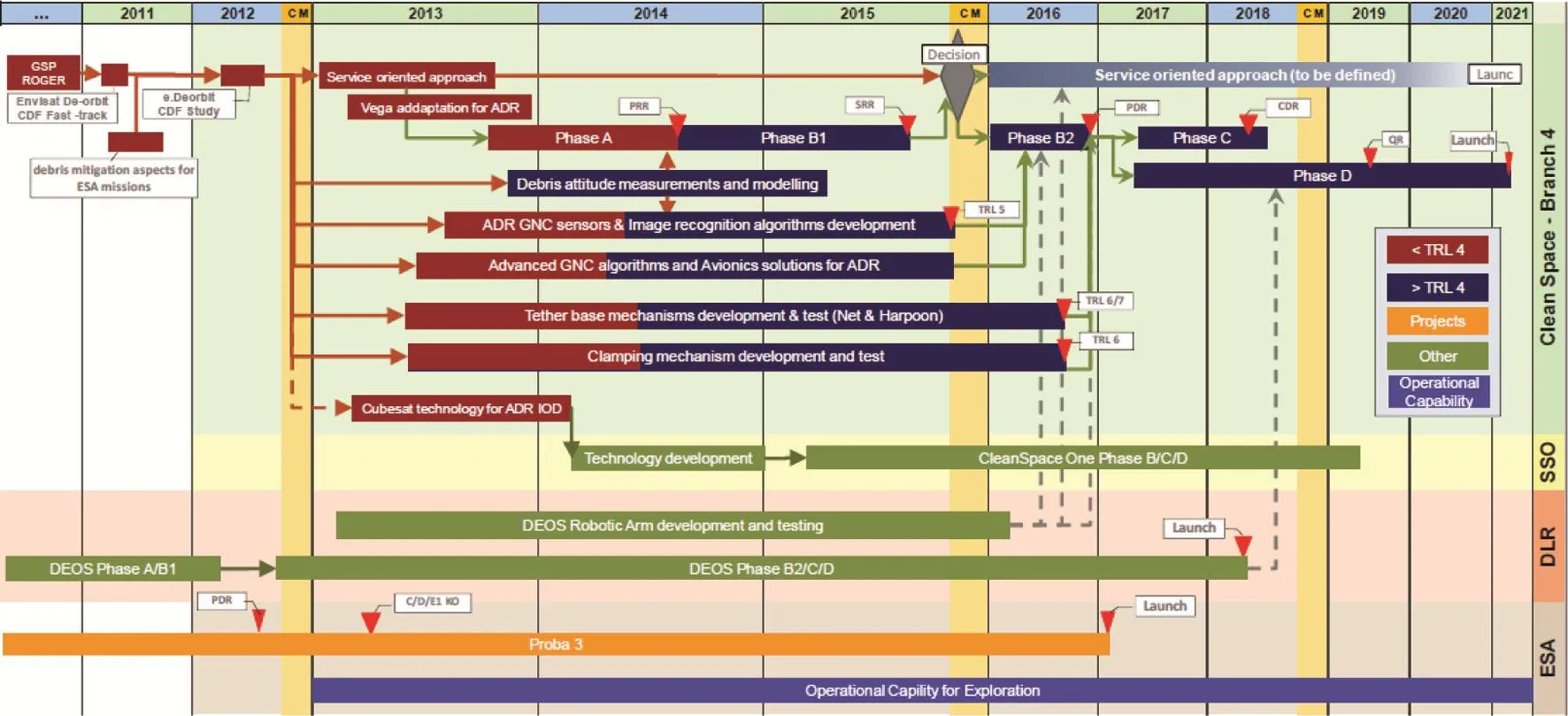
圖7 ESA于2013年發布的空間碎片減緩總路線圖Fig.7 ESA’s space debris mitigation roadmap released in 2013
2)一個飛網+一個冗余備份
3)VEGA運載火箭發射 (1560kg)
4)化學推進,2個425N噴管+2個220N噴管,總質量的56%為推進劑
5)激光雷達、遠距離相機、推力器
6)受控再入
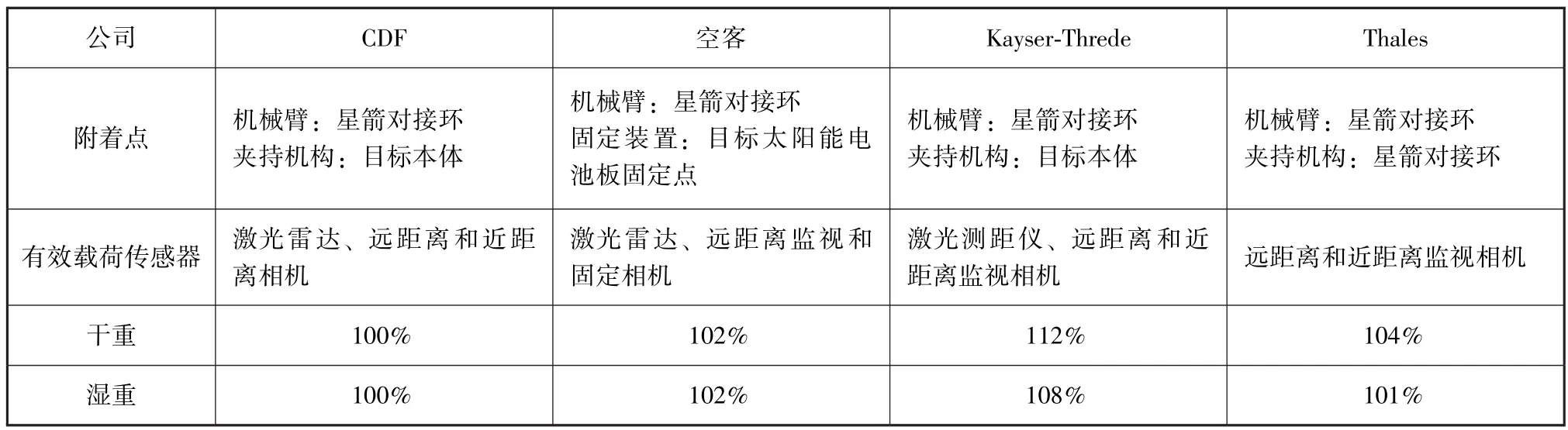
隨后開展的階段A研究工作中,空客、Kayser-Threde和Thales分別就剛性捕獲方案和柔性捕獲方案提出各自的捕獲技術、附著方式、有效載荷、質量和經費等,如表1和表2所示。
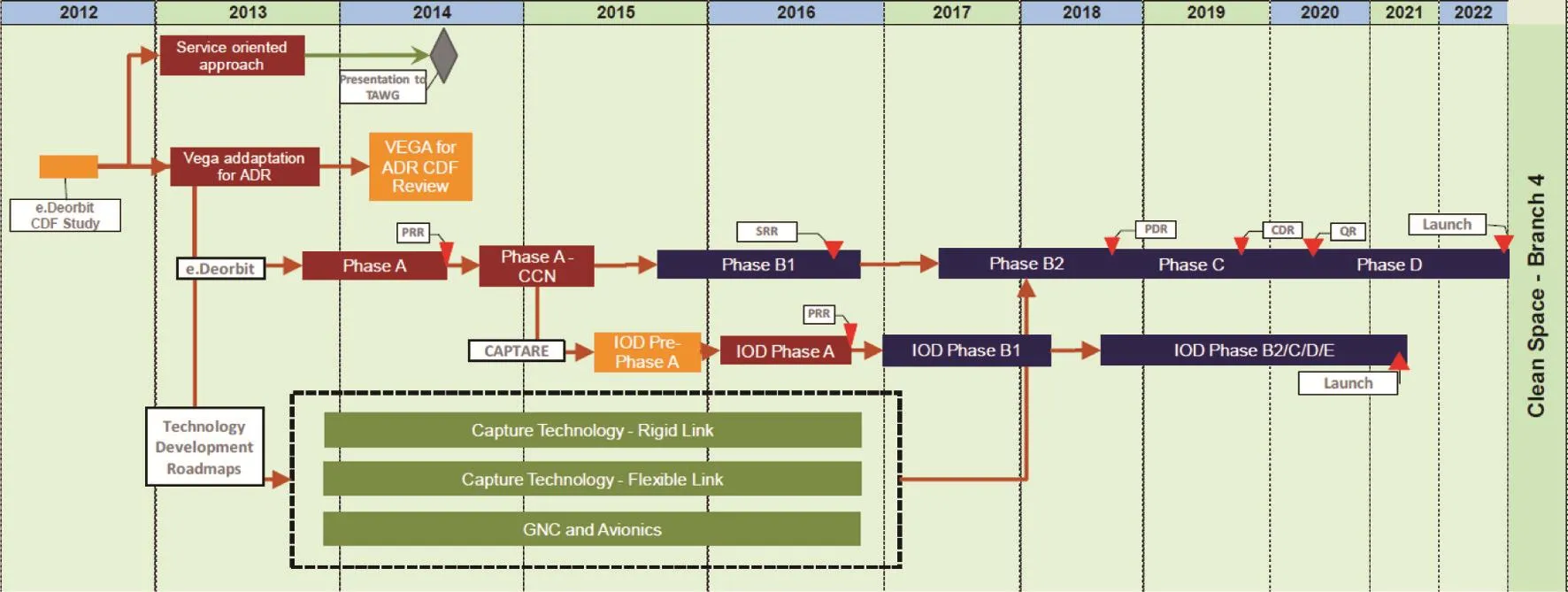
圖8 ESA于2015年在e.deorbit實施計劃中給出的系統研究路線圖Fig.8 ESA’s system research roadmap by e.deorbit implementation plan in 2015
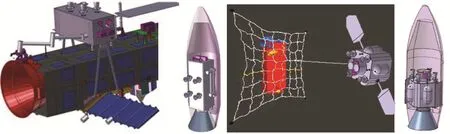
圖9 夾持結構方案 (左)和飛網方案 (右)Fig.9 Clamping structure(left)and fly net(right)

表1 剛性捕獲方案對比Tab.1 Comparison of robotic capture concept
續表1
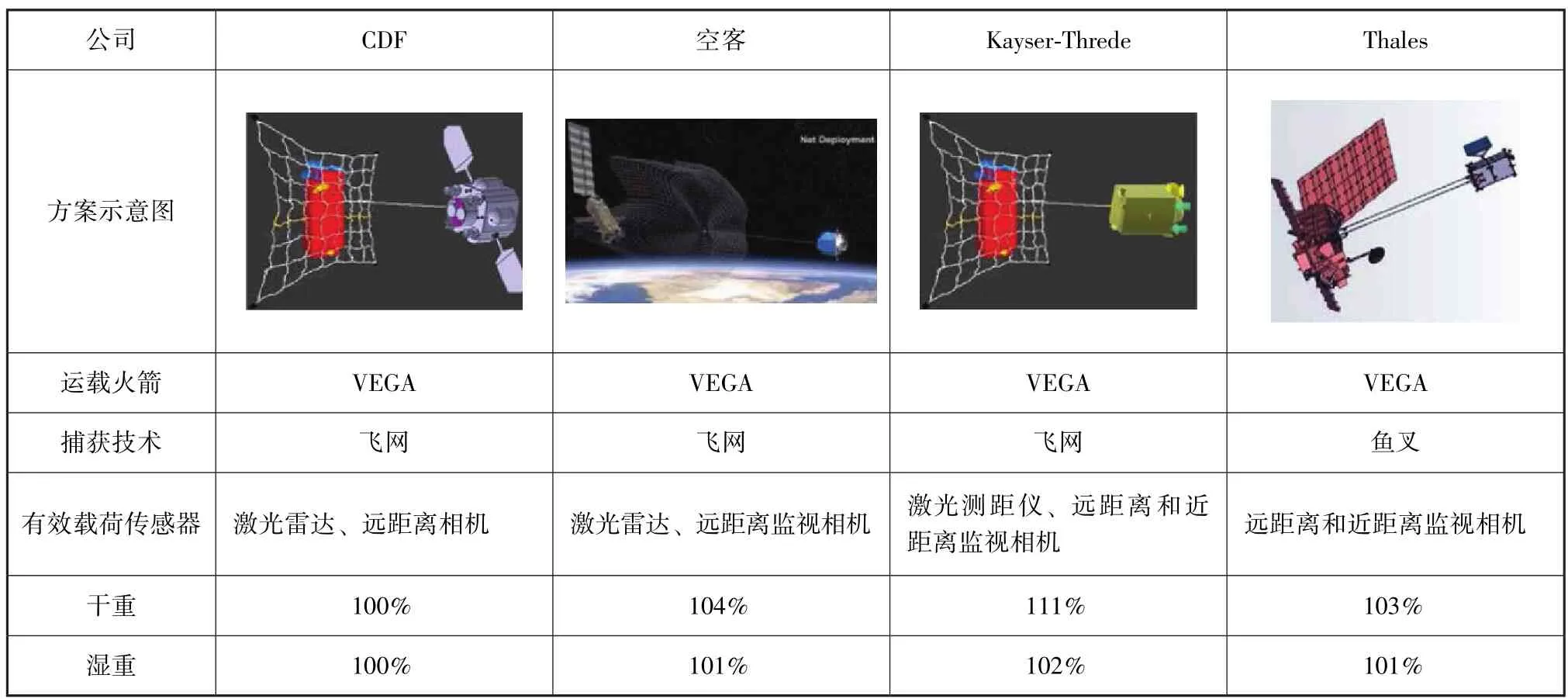
表2 柔性捕獲方案對比Tab.2 Comparison of flexible capture concept
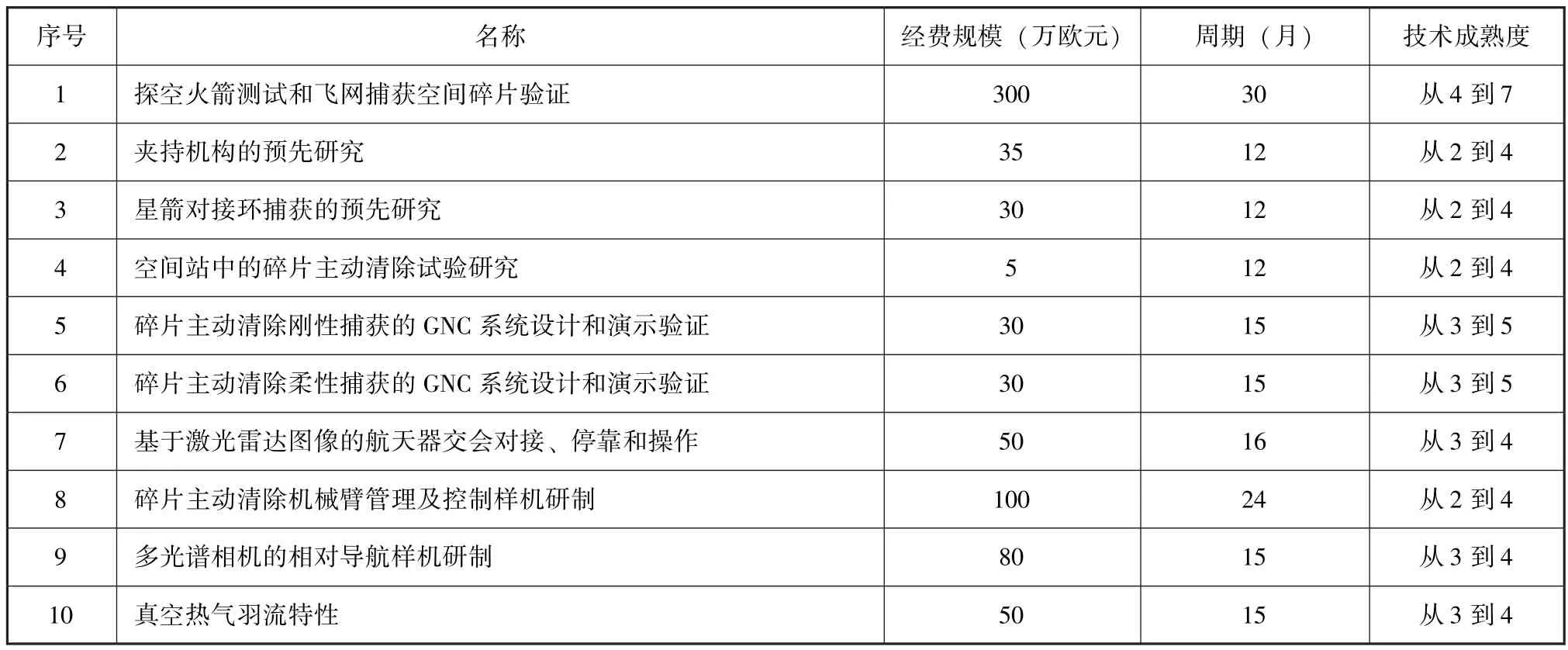
表3 ESA于2015年底提出的后續研究工作Tab.3 Upcoming activity descriptions by ESA at the end of 2015
通過e.deorbit實施階段A的研究工作,目前共識別出5項主要風險,作為階段B1的重點[4]:
①產生更多碎片的風險
②未成功捕獲的風險
③追捕和目標航天器碰撞的風險
④對地面造成傷亡風險
⑤計劃延期的風險
捕獲技術與GNC軟件的技術成熟度較低意味著需要更多經費支持和研發,但首次任務除了利潤和發射費用以外,階段B2/C/D/E的總經費上限為150萬歐元[3]。
4 空間碎片主動清除任務所面臨的挑戰
按照e.deorbit任務實施空間碎片主動清除的6個步驟,并結合e.deorbit任務識別出的5項主要風險,可見執行空間碎片主動清除任務主要面臨著以下三方面的挑戰:
(1)相對目標懸停后對翻滾目標的識別、接近及同步運動。
采用高動態高精度探測技術實現對目標位置、姿態的準確測量和估計,為懸停、接近和同步運動提供重要輸入。基于自主探測感知實現對待捕獲目標特征的識別,為剛性捕獲提供捕獲點。主動清除飛行器應具備高精度的位置和姿態控制能力,實現對目標的接近及同步運動。
(2)無論是采用機械臂等剛性捕獲方式還是飛網等柔性捕獲方式,均應安全可靠,不產生新的空間碎片。
對于剛性捕獲翻滾目標,應在操作環節設置相應的柔順控制,防止捕獲過程中的沖擊對目標或自身造成損壞,避免產生新的碎片。而以飛網為代表的柔性捕獲方式,應注重網口收攏的研究,提升捕獲可靠性。

圖10 在距離目標50m附近的位置懸停,識別翻滾目標,并接近、同步運動Fig.10 Hovering and identifying the tumbling target at a distance of 50m,with approaching and synchronizing

圖11 無論是采用機械臂還是飛網,安全的捕獲方式,實現停靠Fig.11 Either with a robotic arm or a net, capture it in a secure way
(3)在捕獲后,應采取安全可控的方式實現變軌、離軌,實現空間碎片主動清除。
對于剛性捕獲方式應對目標實現接管控制,對組合體的質量特性進行在軌辨識,利于姿態穩定,為組合體離軌提供必要條件。而對于柔性捕獲方式,則應通過機構鎖緊相應的柔性繩網,提升變軌、離軌的安全性。
5 啟示與建議
參照歐洲在空間碎片清除方面的研究工作、技術發展路線圖、工程任務實施計劃,結合我國開展空間碎片減緩技術的研究現狀,提出后續的發展建議:
(1)開展多種途徑的關鍵技術攻關與驗證。
RemoveDEBRIS演示驗證集成飛網、魚叉、視覺導航、制動帆等多種技術開展在軌演示驗證,CleanSpace One計劃以2009年發射的在軌目標開展捕獲及離軌技術驗證,具備一定的工程應用能力。建議我國應持續跟蹤國外空間碎片主動清除技術,開展深入研究,不斷提升技術成熟度。
(2)加快推進空間碎片清除工程化實施。
e.deorbit項目明確以清除ENVISAT為目標開展多種途徑的技術方案論證,為后續2024年計劃實施的主動清除任務實施提供重要依據。建議我國也應結合多種途徑的關鍵技術攻關,加快推進空間碎片清除工程化實施。
(3)瞄準商業市場開展空間碎片清除服務。
具備空間碎片清除工程化應用能力后,應充分借助運載火箭及上面級發射后的剩余能力,提供空間碎片清除商業服務,實現高效率低成本運營,為商業航天的多元化發展提供有效支撐。
