開(kāi)-閉環(huán)結(jié)合控制方式的定日鏡跟蹤控制策略
2018-09-15 04:31:08郝曉弘郭鐵鍔汪寧渤
自動(dòng)化儀表 2018年9期
郝曉弘,郭鐵鍔,汪寧渤,丁 坤
(1.蘭州理工大學(xué)電氣工程與信息工程學(xué)院,甘肅 蘭州 730050; 2.甘肅電力公司風(fēng)電技術(shù)中心,甘肅 蘭州 730050)
0 引言
定日鏡是塔式光熱電站中用于收集太陽(yáng)能并將其聚集到吸熱器的裝置。其在電站中數(shù)量較多、占據(jù)場(chǎng)地較大。其控制方式、跟蹤精度和穩(wěn)定性等性能的優(yōu)劣,將直接影響電站的運(yùn)行效率。
常見(jiàn)的定日鏡跟蹤控制方式有開(kāi)環(huán)控制和閉環(huán)控制兩種[1]。國(guó)外已建塔式電站大多采用開(kāi)環(huán)控制方式。開(kāi)環(huán)控制(即程序控制)具有跟蹤快速、適用于大型鏡場(chǎng)集中調(diào)度方便的優(yōu)點(diǎn),其缺點(diǎn)是控制算法復(fù)雜、存在累積誤差[2-5]且較難校正。閉環(huán)控制(即傳感器控制)通過(guò)光電傳感器檢測(cè)定日鏡與太陽(yáng)光線的相對(duì)位置,根據(jù)偏差控制執(zhí)行機(jī)構(gòu)運(yùn)動(dòng),從而達(dá)到精準(zhǔn)聚集太陽(yáng)光的目的[1,6-8]。這類控制可有效克服累積誤差以及鏡面偏心導(dǎo)致的跟蹤角度修正問(wèn)題。但其缺點(diǎn)也顯而易見(jiàn):當(dāng)陰天時(shí),光電傳感器無(wú)法檢測(cè)到太陽(yáng)光,可能導(dǎo)致控制失效;不適用于鏡場(chǎng)的集中監(jiān)控和調(diào)度;光電傳感器較難實(shí)施定日鏡的大范圍跟蹤,并且跟蹤的精度受傳感器結(jié)構(gòu)、光電池的靈敏度等因素的影響。
由于以上兩種控制方式存在不同的優(yōu)缺點(diǎn),隨著塔式電站對(duì)定日鏡跟蹤精度要求的不斷提高,本文提出一種兼具這兩種控制方式優(yōu)點(diǎn)的開(kāi)-閉環(huán)結(jié)合的控制方式,并通過(guò)試驗(yàn),驗(yàn)證了該方法的可行性。
1 定日鏡結(jié)構(gòu)
根據(jù)定日鏡設(shè)計(jì)要求及控制方式,本文研究的定日鏡采用雙軸結(jié)構(gòu),即方位角-高度角跟蹤。定日鏡結(jié)構(gòu)如圖1所示。
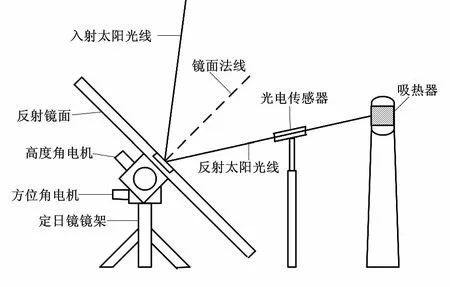
圖1 定日鏡結(jié)構(gòu)圖
部分入射太陽(yáng)光線經(jīng)過(guò)定日鏡鏡面幾何中心(幾何中心處放置一塊小型平面鏡)反射后,反射太陽(yáng)光線穿過(guò)閉環(huán)光電傳感器,投射到吸熱器內(nèi)。當(dāng)太陽(yáng)相對(duì)運(yùn)動(dòng)時(shí),跟蹤控制系統(tǒng)通過(guò)控制定日鏡的鏡面角度,使定日鏡鏡面中心、閉環(huán)光電傳感器與吸熱器接收面中心點(diǎn)(或其他指定目標(biāo)點(diǎn))始終成“三點(diǎn)一線”。
2 跟蹤控制策略
跟蹤控制系統(tǒng)采用開(kāi)-閉環(huán)結(jié)合的控制方式。開(kāi)環(huán)進(jìn)行鏡場(chǎng)集中控制,快速調(diào)整各定日鏡光斑位置。閉環(huán)進(jìn)行跟蹤微調(diào),校正和消除定日鏡累積誤差,實(shí)現(xiàn)精準(zhǔn)跟蹤。對(duì)于因陰雨天或光照強(qiáng)度過(guò)低而導(dǎo)致的光電傳感器失效、鏡場(chǎng)能量的優(yōu)化調(diào)度等情況,系統(tǒng)將只進(jìn)行開(kāi)環(huán)控制,所以開(kāi)環(huán)控制方式也應(yīng)具有較高的跟蹤精度。
根據(jù)太陽(yáng)運(yùn)行規(guī)律和定日鏡場(chǎng)經(jīng)緯度等數(shù)據(jù),監(jiān)控計(jì)算機(jī)實(shí)時(shí)計(jì)算入射太陽(yáng)光的方位角和高度角,并將定日鏡旋轉(zhuǎn)目標(biāo)值發(fā)送至定日鏡控制器,控制器輸出脈沖寬度調(diào)制(pulse width modulation,PWM)信號(hào),驅(qū)動(dòng)方位角、高度角電機(jī)按設(shè)定的方向、位置轉(zhuǎn)動(dòng)。
在一個(gè)控制周期內(nèi),當(dāng)定日鏡角度反饋值與目標(biāo)值的偏差大于Emax時(shí),定日鏡以快速運(yùn)行速度Vmax進(jìn)行快速定位(即開(kāi)環(huán)粗調(diào));當(dāng)偏差小于Emax時(shí),定日鏡進(jìn)行開(kāi)環(huán)細(xì)調(diào),采用增量式PID算法繼續(xù)跟蹤,至此實(shí)現(xiàn)開(kāi)環(huán)控制;當(dāng)定日鏡跟蹤偏差進(jìn)一步減小至Emin,達(dá)到光電傳感器的工作范圍內(nèi),并且光照強(qiáng)度高于傳感器正常工作限制,則切換至閉環(huán)控制。閉環(huán)微調(diào)過(guò)程采用閉環(huán)跟蹤速度Vmin。整個(gè)控制周期內(nèi)采用復(fù)合式控制算法,如式(1)所示。當(dāng)下一次反射太陽(yáng)光偏離誤差產(chǎn)生后,重復(fù)以上控制過(guò)程,實(shí)現(xiàn)定日鏡精準(zhǔn)跟蹤。此外,在閉環(huán)控制過(guò)程中,如果出現(xiàn)光電傳感器失效、鏡場(chǎng)需要優(yōu)化調(diào)度等情況,即切換至開(kāi)環(huán)控制。
(1)
式中:U為算法輸出值,即步進(jìn)電機(jī)PWM脈沖頻率控制量;Vmax為定日鏡快速移動(dòng)速度輸出;f(PID)為增量式數(shù)字PID算法;Vmin為定日鏡閉環(huán)跟蹤速度輸出;E為反饋值與目標(biāo)值的偏差;Emax和Emin為偏差絕對(duì)值的兩個(gè)設(shè)定閾值。

3 開(kāi)環(huán)控制
開(kāi)環(huán)控制依據(jù)反饋值與目標(biāo)值偏差的絕對(duì)值大小分成兩段進(jìn)行,如式(2)所示。
(2)
當(dāng)偏差E大于26 mrad時(shí),定日鏡以開(kāi)環(huán)速度Vmax快速達(dá)到等待點(diǎn);當(dāng)偏差E小于26 mrad時(shí),定日鏡轉(zhuǎn)換為開(kāi)環(huán)細(xì)調(diào),進(jìn)行變速運(yùn)行。此時(shí),跟蹤精度成為關(guān)鍵指標(biāo),采用增量式數(shù)字PID算法。
定日鏡跟蹤控制時(shí),采用主從方式,以Modbus遠(yuǎn)程終端單元(remote terminal unit,RTU)通信協(xié)議實(shí)現(xiàn)與監(jiān)控計(jì)算機(jī)的通信,通信波特率為9 600 bit/s。監(jiān)控計(jì)算機(jī)每隔一定的時(shí)間向各定日鏡ID發(fā)送命令。命令串中包含定日鏡角度目標(biāo)值。時(shí)間間隔的設(shè)置與吸熱器接收靶大小、由定日鏡間歇式運(yùn)動(dòng)導(dǎo)致的最大允許漂移誤差以及太陽(yáng)周日運(yùn)動(dòng)角度變化率等因素有關(guān)。本文將間隔設(shè)置為12 s。
當(dāng)定日鏡接收到狀態(tài)查詢命令時(shí),采用應(yīng)答方式將定日鏡的運(yùn)行狀態(tài)返回至監(jiān)控計(jì)算機(jī),方便監(jiān)控計(jì)算機(jī)分析和處理數(shù)據(jù),觀察跟蹤效果。對(duì)于定日鏡臺(tái)數(shù)眾多的鏡場(chǎng),為方便分組集中管理,可將每20臺(tái)定日鏡分為一組,由網(wǎng)絡(luò)中繼器連接構(gòu)成子網(wǎng)。各子網(wǎng)再通過(guò)各自的網(wǎng)絡(luò)中繼器與監(jiān)控計(jì)算機(jī)相連。
4 閉環(huán)控制
光電傳感器主要由凸透鏡、鏡筒、光電池、金屬外殼等部件組成[9]。
4.1 光電傳感器設(shè)計(jì)
光電池布置采用四象限法則[10]。將四片性能、參數(shù)相同的光電池分別安裝在鏡筒底部的Ⅰ、Ⅱ、Ⅲ和Ⅳ四個(gè)象限內(nèi),如圖2所示。光電池Ⅰ、Ⅱ、Ⅲ和Ⅳ由隔板隔開(kāi),分別代表東、北、西、南四個(gè)方向。

圖2 光電池布置圖
在光電池前放置長(zhǎng)度可調(diào)的鏡筒,并將凸透鏡放置在鏡筒前端。當(dāng)光線平行于光軸(透鏡法線方向)射入凸透鏡時(shí),合理調(diào)節(jié)鏡筒的長(zhǎng)度,使光斑均勻落在四片光電池上,則此時(shí)各光電池輸出電流大小相等。當(dāng)光線與光軸成φ角入射時(shí),在四片光電池上形成的光斑必然發(fā)生偏移。光線與光軸不平行時(shí)的光斑如圖3所示。光線照到的地方用陰影部分表示。此時(shí)光斑不再等面積地覆蓋在四片光電池上,各光電池產(chǎn)生的光電流也不再相等。這時(shí),控制器經(jīng)過(guò)A/D轉(zhuǎn)化模塊采樣經(jīng)過(guò)信號(hào)放大的光電壓信號(hào)[11-12],并經(jīng)過(guò)比較算法,驅(qū)動(dòng)方位角電機(jī)和高度角電機(jī)動(dòng)作,直到Ⅰ、Ⅲ象限和Ⅱ、Ⅳ象限光電池輸出的光電壓相等或電壓差在誤差范圍內(nèi),即太陽(yáng)光線與透鏡光軸平行,電機(jī)停止運(yùn)行。Ⅰ、Ⅲ象限電壓差控制方位角電機(jī)運(yùn)轉(zhuǎn),Ⅱ、Ⅳ象限電壓差控制高度角電機(jī)運(yùn)轉(zhuǎn)。

圖3 光線與光軸不平行時(shí)的光斑圖
鏡筒的長(zhǎng)度決定了閉環(huán)控制運(yùn)行時(shí)的角度范圍,即跟蹤系統(tǒng)切入閉環(huán)控制的角度閾值。光電傳感器的精度決定了閉環(huán)跟蹤運(yùn)行時(shí)的位置精度。因此,當(dāng)閉環(huán)控制時(shí),能夠比較容易地提高跟蹤系統(tǒng)的精確度。
本文設(shè)計(jì)的光電傳感器,鏡筒長(zhǎng)200 mm,光電池直徑為24 mm;凸透鏡參數(shù)為厚度5 mm,直徑為24 mm,焦距為800 mm。當(dāng)太陽(yáng)光線平行于光軸入射時(shí),形成的光斑直徑d為:
(3)

為了克服云遮工況或者早晨太陽(yáng)升起以及太陽(yáng)落山等工況造成的光照強(qiáng)度過(guò)低、閉環(huán)控制失效等情況,控制器在采樣電壓信號(hào)的同時(shí),對(duì)光電流強(qiáng)度進(jìn)行測(cè)量。當(dāng)光照強(qiáng)度低于設(shè)定閾值,控制系統(tǒng)切入開(kāi)環(huán)控制。
4.2 跟蹤精度分析
圓形光斑移動(dòng)圖如圖4所示[9]。當(dāng)太陽(yáng)光斑圓心落在光電池中心O點(diǎn)時(shí),Ⅰ、Ⅲ象限面積之差為零,Ⅱ、Ⅳ象限面積之差為零,則東西方向和南北方向電壓差為零。
假設(shè)光斑隨著太陽(yáng)光線的偏移以近似圓形移動(dòng),并且圓形光斑半徑為r。當(dāng)光斑移動(dòng)Δx時(shí)(如圖4所示),光斑落在第Ⅰ象限的面積為扇形SCOD,光斑落在第Ⅲ象限的面積為扇形SAOB。

圖4 圓形光斑移動(dòng)圖
圖4中,點(diǎn)A、B、C、D為光斑移動(dòng)后與各象限邊界的交點(diǎn)。設(shè)∠OAO′=θ,則根據(jù)圖中對(duì)應(yīng)關(guān)系,∠BCO′=∠O′BC=∠OAO′=θ。由圖4可得出以下公式:
(5)
(6)
所以,扇形SCOD和SAOB的面積之差y可表示為:
(7)

(8)
則面積變化率表示為:
(9)

(10)
光電池的半徑r0=12 mm。在此選擇光電池的開(kāi)路電壓U0=650 mV,則Ⅰ、Ⅲ象限的電壓差ΔU變化最大值為:
(11)

5 定日鏡控制程序設(shè)計(jì)
跟蹤流程如圖5所示。圖5中,E(k)為定日鏡角度目標(biāo)值和反饋值之間的偏差。控制切換條件為:當(dāng)光電傳感器失效、鏡場(chǎng)優(yōu)化調(diào)度時(shí),閉環(huán)控制切換至開(kāi)環(huán)控制。

圖5 跟蹤流程圖
6 跟蹤精度測(cè)量
對(duì)所設(shè)計(jì)的定日鏡跟蹤系統(tǒng)進(jìn)行了測(cè)試。首先,測(cè)量定日鏡對(duì)應(yīng)焦距f,選定測(cè)試時(shí)間段,繪制接收靶刻度。然后,設(shè)置定日鏡為接收靶跟蹤狀態(tài),每隔5 min利用光斑采集系統(tǒng)捕捉對(duì)應(yīng)時(shí)刻的光斑圖像,利用軟件確定光斑中心點(diǎn)。光斑直徑以90%能量集中范圍來(lái)限定。

測(cè)試選址在南京江寧(北緯31.98°,東經(jīng)118.83°),時(shí)間為2016年8月20日,當(dāng)?shù)啬昶骄鶜鉁貫?5.5℃,年平均大氣壓為1 015.4 hPa,海拔高度為8.9 m[12]。根據(jù)上述數(shù)據(jù),實(shí)時(shí)計(jì)算當(dāng)天當(dāng)?shù)氐奶?yáng)高度角和方位角。對(duì)應(yīng)的開(kāi)環(huán)控制和閉環(huán)控制測(cè)試的結(jié)果如表1所示。檢測(cè)條件為:風(fēng)速<4 m/s,f=50 m。由表1可知,本文設(shè)計(jì)的定日鏡控制系統(tǒng)開(kāi)環(huán)控制精度優(yōu)于3.5 mrad,閉環(huán)跟蹤精度優(yōu)于1 mrad。

表1 控制精度測(cè)試結(jié)果
7 結(jié)束語(yǔ)
本文設(shè)計(jì)了基于開(kāi)-閉環(huán)結(jié)合控制方式的定日鏡跟蹤裝置,提出了復(fù)合控制策略,有效克服了開(kāi)環(huán)、閉環(huán)單獨(dú)控制方式的各自缺點(diǎn),實(shí)現(xiàn)了定日鏡的高效、精準(zhǔn)、穩(wěn)定跟蹤。在試驗(yàn)測(cè)試中,該定日鏡控制不僅開(kāi)環(huán)精度優(yōu)于3.5 mrad,閉環(huán)跟蹤精度優(yōu)于1 mrad,而且定日鏡與監(jiān)控計(jì)算機(jī)實(shí)時(shí)通信,實(shí)現(xiàn)了開(kāi)、閉環(huán)方式的自動(dòng)、無(wú)擾切換,達(dá)到了預(yù)期研究效果,具有很高的推廣應(yīng)用價(jià)值。
