以分?jǐn)?shù)階微分為基礎(chǔ)的尺度不變特征變換圖像匹配算法分析
2018-09-13 10:54:48孫奇
電腦與電信 2018年7期
孫奇
(北京信息職業(yè)技術(shù)學(xué)院,北京 100018)
1 圖像處理與匹配理論
1.1 分?jǐn)?shù)階微分
在計(jì)算機(jī)的視覺識別中,提取圖像匹配特征的關(guān)鍵點(diǎn),應(yīng)提前保證圖像的清晰度良好,圖片模糊或紋理區(qū)域相對較弱的時(shí)候,圖像特征不會特別突出,這將會直接造成難以準(zhǔn)確提取圖像的關(guān)鍵點(diǎn),以此導(dǎo)致圖像匹配的準(zhǔn)確性大大降低。但是,分?jǐn)?shù)階微分能夠以圖像特征增強(qiáng)的方式,進(jìn)一步解決這一不良現(xiàn)象。分?jǐn)?shù)階微分來源于古典微積分,從古至今發(fā)展形成了一定的表達(dá)式,即R-L定義、G-L定義和Caputo定義。其中,R-L定義與G-L定義都可以利用卷積形式計(jì)算數(shù)值,但是,G-L定義主要把微分階次從整數(shù)限定條件向分?jǐn)?shù)條件進(jìn)行推廣,所以,能夠在很大程度上保證圖像處理結(jié)果的精確度,并在各個(gè)領(lǐng)域得以廣泛應(yīng)用。本文通過利用G-L定義,處理圖像特征。
1.2 分?jǐn)?shù)階微分
利用各種尺度的分?jǐn)?shù)階微分掩模算子,調(diào)節(jié)分?jǐn)?shù)階階數(shù),觀察分?jǐn)?shù)階微分的圖像增強(qiáng)效果。利用m×n算子,進(jìn)行圖像分?jǐn)?shù)階運(yùn)算,以此增強(qiáng)圖像。其中運(yùn)算規(guī)則就是利用模板算子對m×n大小的圖像通過相關(guān)公式,進(jìn)行線性濾波。其中,一般模板大小m與n是相同的,而且都屬于奇數(shù)。為了確保圖像全方位接受濾波處理,需要對各個(gè)像素點(diǎn)加以處理。由于屬于方形掩模,在其中心點(diǎn)距離圖像邊緣小于(n-1)/2個(gè)像素的時(shí)候,掩模行與列都會位于圖像平面以外,圖像的周圍像素則無法進(jìn)行濾波處理。而為了確保效果良好,在進(jìn)行運(yùn)算的時(shí)候,應(yīng)該先填充圖像,將邊緣填充(m-1)/2行與(n-1)/2列,這樣一來,則能對圖像邊緣的像素點(diǎn)進(jìn)行分?jǐn)?shù)階微分計(jì)算。
1.3 尺度不變特征變換
所謂尺度不變特征變換圖像匹配算法是由Lowe提出來的。利用SIFT算法所獲取的特征關(guān)鍵點(diǎn)描述子與圖像比例、旋轉(zhuǎn)變化有較好的適應(yīng)性,是現(xiàn)階段最為有效的計(jì)算機(jī)視覺圖像處理技術(shù),而且在各個(gè)領(lǐng)域都實(shí)現(xiàn)了廣泛應(yīng)用。SIFT圖像匹配算法整個(gè)流程包括五大步驟:(1)檢測尺度空間的極值;(2)定位關(guān)鍵點(diǎn);(3)匹配關(guān)鍵點(diǎn)的具體方向;(4)制造SIFT特征關(guān)鍵點(diǎn)描述子;(5)匹配SIFT特征。
1.3.1 檢測尺度空間極值
因?yàn)镾IFT算法需要在尺度空間上,提取圖像特征關(guān)鍵點(diǎn),所以,需要提前把圖像向尺度空間內(nèi)部轉(zhuǎn)換,可以利用二維高斯函數(shù)和圖像,通過卷積計(jì)算,把二維圖像向尺度空間內(nèi)部轉(zhuǎn)換,具體的轉(zhuǎn)換過程為:

其中,L(x,y,σ)代表尺度空間的圖像;G(x,y,σ)代表高斯函數(shù);I(x,y)代表原始圖像;σ代表灰度空間的尺度因子。想要進(jìn)一步檢測尺度空間的極值,可以利用差分高斯函數(shù)和原始圖像,通過卷積計(jì)算,獲得尺度空間極值。
1.3.2 定位關(guān)鍵點(diǎn)
定位關(guān)鍵點(diǎn),關(guān)鍵在于計(jì)算DoG函數(shù)的二次泰勒,同時(shí)利用以下公式對采樣點(diǎn)進(jìn)行計(jì)算:

其中,X=(x,y,σ),T代表極值點(diǎn)到樣本數(shù)據(jù)點(diǎn)的偏移量,在X求導(dǎo)之后,取其中極值,獲取極值點(diǎn)的具體位置。
1.3.3 匹配關(guān)鍵點(diǎn)方向
SIFT在變換時(shí),都明確對圖像局部特征的具體關(guān)鍵點(diǎn)進(jìn)行方向設(shè)定,所以,可以實(shí)現(xiàn)圖像旋轉(zhuǎn)的不變性,在計(jì)算關(guān)鍵點(diǎn)方向的相關(guān)參數(shù)時(shí),可以通過獲取關(guān)鍵點(diǎn)相鄰區(qū)域像素的梯度方向分布特性,以此確定關(guān)鍵點(diǎn)的梯度模值與方向,進(jìn)一步明確匹配關(guān)鍵點(diǎn)方向。
1.3.4 構(gòu)造SIFT特征關(guān)鍵點(diǎn)描述子
通過確定關(guān)鍵點(diǎn)的具體位置、尺度、方向參數(shù),使在二維空間中圖像局部特征不會發(fā)生變化。如果需要圖像在光照變化與3D圖像中不會發(fā)生變化,需要構(gòu)造特征關(guān)鍵點(diǎn)描述子。在進(jìn)行構(gòu)造時(shí),應(yīng)先計(jì)算關(guān)鍵點(diǎn)周圍的像素點(diǎn)梯度模值與方向,再利用關(guān)鍵點(diǎn)的尺度,進(jìn)一步確定圖像模糊高斯函數(shù)的尺度因子,然后調(diào)整描述子坐標(biāo)與梯度方向,確保其與關(guān)鍵點(diǎn)保持在同一方向,以此保證旋轉(zhuǎn)不會發(fā)生變化。
1.3.5 匹配SIFT特征
匹配SIFT圖像特征的時(shí)候,應(yīng)先確定首張圖像的特定局部特征關(guān)鍵點(diǎn),尋找此關(guān)鍵點(diǎn)到次張圖像的最小歐氏間距以及次歐氏間距。如果最近間距與次近間距相除,獲取的值在閾值以內(nèi),那么可以匹配圖像中的兩個(gè)關(guān)鍵點(diǎn),閾值一般設(shè)定為0.8。
2 實(shí)驗(yàn)結(jié)果分析
想要進(jìn)一步對分?jǐn)?shù)階微分的圖像配準(zhǔn)算法性能提升進(jìn)行驗(yàn)證,應(yīng)選擇不同階數(shù),并匹配實(shí)驗(yàn)多幅圖像。其中,選擇灰度圖像如圖1-1所示,并旋轉(zhuǎn)30°,獲得圖1-2所示,利用SIFT算法,提取圖1的SIFT特征關(guān)鍵點(diǎn),再匹配圖像。通過利用RANSAC算法,對錯(cuò)誤的匹配數(shù)進(jìn)行判斷。
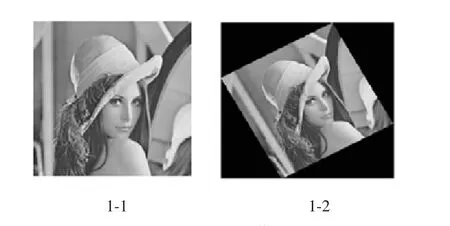
圖1 匹配圖像
選取不同分?jǐn)?shù)階數(shù)的改進(jìn)SIFT算法與原始SIFT匹配算法做實(shí)驗(yàn)比較分析,具體結(jié)果如表1所示。
就相關(guān)數(shù)據(jù)可知,使用分?jǐn)?shù)階微分與改進(jìn)SIFT匹配算法能夠獲得更多關(guān)鍵點(diǎn),以此提高匹配的正確率。在分?jǐn)?shù)階階數(shù)在0.4的時(shí)候,在圖1匹配中,關(guān)鍵點(diǎn)個(gè)數(shù)與正確匹配數(shù)最大,而且匹配率也得以明顯提升。在0.8時(shí),達(dá)到了最高狀態(tài)。這就說明在分?jǐn)?shù)階微分中利用SIFT匹配算法,所檢測的關(guān)鍵點(diǎn)個(gè)數(shù)與匹配數(shù)都會得到很大程度上的提升,其中錯(cuò)誤配數(shù)也會有所減少,并大大提高圖像匹配的準(zhǔn)確率。
為了進(jìn)一步證明SIFT算法的良好性能,選取圖2,利用不同分?jǐn)?shù)階算子做匹配實(shí)驗(yàn)。
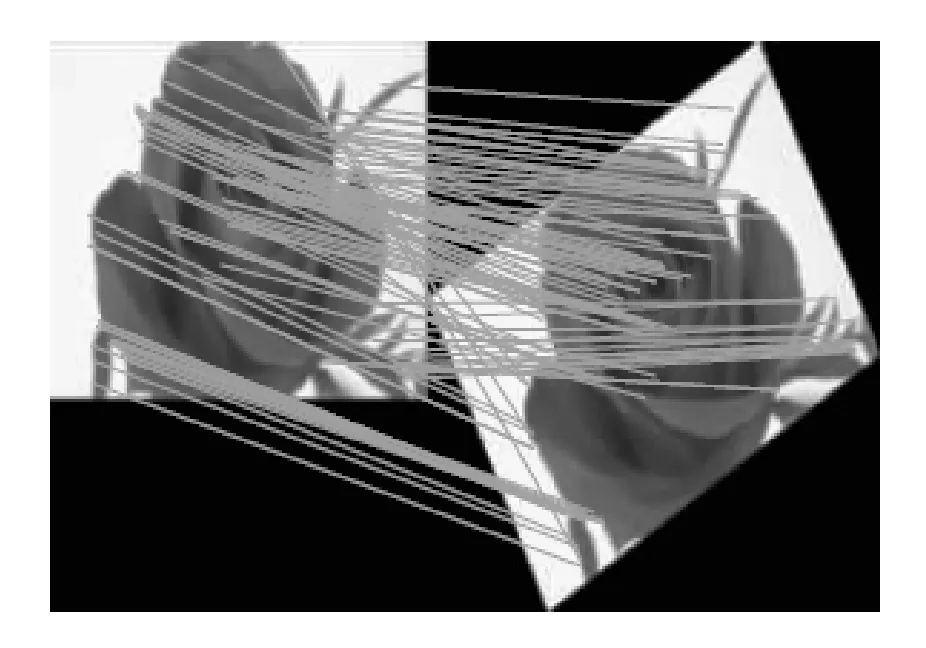
圖2 匹配圖像

表1 特征點(diǎn)數(shù)與匹配
通過利用5×5大小的分?jǐn)?shù)階算子進(jìn)行實(shí)驗(yàn)分析,結(jié)果具體如表2所示。
就相關(guān)數(shù)據(jù)可知,分?jǐn)?shù)階微分與改進(jìn)SIFT匹配算法的有效性較好,在階數(shù)為0.6的時(shí)候,匹配對數(shù)最大,匹配率也有明顯提高。在階數(shù)為0.8的時(shí)候,匹配率能夠達(dá)到最高狀態(tài)。這說明改進(jìn)SIFT算法可以在很大程度上提高關(guān)鍵點(diǎn)個(gè)數(shù)與匹配對數(shù),以此促使匹配的正確率得到明顯提升。
通過利用3×3大小的分?jǐn)?shù)階算子進(jìn)行實(shí)驗(yàn)分析,結(jié)果具體如表3所示。
就相關(guān)數(shù)據(jù)可知,利用3×3大小尺度的分?jǐn)?shù)階算子,直接提高了SIFT匹配的關(guān)鍵點(diǎn)個(gè)數(shù)、匹配對數(shù)、匹配準(zhǔn)確率,但是匹配效果與5×5大小尺度比較,相對較低。
通過圖1和圖2的結(jié)果統(tǒng)計(jì)比較分析,具體如表4所示。
就相關(guān)數(shù)據(jù)可知,在階數(shù)為0.5-0.8的時(shí)候,匹配準(zhǔn)確率相對較高,而且在0.8的時(shí)候達(dá)到了最高狀態(tài)。這就說明利用分?jǐn)?shù)階微分與改進(jìn)SIFT匹配算法,在選擇合適的分?jǐn)?shù)階數(shù)時(shí),既可以大大降低錯(cuò)誤匹配率,又可以提高匹配準(zhǔn)確率。

表2 特征點(diǎn)數(shù)與匹配

表3 特征點(diǎn)數(shù)與匹配

表4 結(jié)果分析統(tǒng)計(jì)
3 結(jié)語
在計(jì)算機(jī)視覺領(lǐng)域中,圖像匹配是十分重要的組成部分,并且與人類日常生活密切相關(guān)。所以,隨之衍生了大量圖像匹配技術(shù)。隨著基于局部特征描述子的提出,也就是尺度不變特征變換算法,其可以提取十分穩(wěn)定的特征點(diǎn),而且具備旋轉(zhuǎn)不變特性,即使是目標(biāo)旋轉(zhuǎn)、平移、大小、光照等都可以保持不變。因此,SIFT算法在圖像匹配中的應(yīng)用越來越廣泛。SIFT圖像匹配算法主要是以局部特征為依據(jù),合理選擇特征匹配點(diǎn),通過分?jǐn)?shù)階微數(shù)處理圖像,可以明顯提高圖像的紋理細(xì)節(jié)特征,把分?jǐn)?shù)階微分與SIFT匹配算法有機(jī)結(jié)合,能夠在很大程度上提高關(guān)鍵點(diǎn)數(shù)與匹配對數(shù),使正確匹配率和SIFT算法效率得以提升。
猜你喜歡
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·中考版(2022年12期)2022-02-16 07:36:56
今日農(nóng)業(yè)(2021年8期)2021-11-28 05:07:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國衛(wèi)生(2014年2期)2014-11-12 13:00:16

- 電腦與電信的其它文章
- PBL模式下高職院校C語言程序設(shè)計(jì)課程教學(xué)改革與實(shí)踐
- 數(shù)據(jù)挖掘技術(shù)在高校網(wǎng)絡(luò)運(yùn)維管理中的應(yīng)用研究
- 實(shí)驗(yàn)室信息系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 淺析智慧水務(wù)在城鎮(zhèn)的彈性應(yīng)用
- 基于Ext JS與SSH2架構(gòu)的固定資產(chǎn)信息管理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 福建省氣象CIMISS存儲系統(tǒng)擴(kuò)容的設(shè)計(jì)