基于光纖傳感技術的輸電線路覆冰監測系統
2018-09-07 05:39:30張長勝梁仕斌
電力科學與工程 2018年8期
楊 俊, 張長勝, 梁仕斌, 李 川, 昌 明
(1. 昆明理工大學 信息工程與自動化學院,云南 昆明 650501; 2. 云南電網公司研究生工作站, 云南 昆明 650217; 3. 云南電力試驗研究院(集團)有限公司,云南 昆明 650217; 4. 昆明能訊有限責任公司,云南 昆明 650217)
0 引言
輸電線路是電力系統穩定運行的基礎,輸電線路覆冰和積雪會導致其性能下降,會引起到地線折斷,導線舞動,絕緣子覆冰閃絡,甚至導致桿塔倒塌和通信中斷等嚴重事故[1~3]。因此加強對輸電線路的覆冰監測具有保證電網穩定工作和減小國家經濟損失的意義。
目前國內的輸電線路覆冰監測系統主要通過導線溫度/傾角傳感器、拉力傳感器以及圖像在線監測實現[4,5]。但是,現有的傳感器均為電子式測量傳感器,容易受到野外環境干擾,具有非線性、零點漂移等特性,測量結果穩定性差,使用壽命比較短,可靠性有待提高[6,7]。與電子式測量傳感器比,光纖Bragg光柵傳感器具有耐腐蝕、無需野外供電、抗電磁干擾能力強、傳輸距離較遠等特點[8,9]。
基于光纖Bragg光柵傳感器的輸電線路覆冰監測系統是一套為了針對輸電線路在某些特殊地點覆冰而設計的,通過在桿塔上安裝光纖Bragg光柵拉力傳感器,可監測輸電線路覆冰情況。并將傳感信號通過OPGW光纜傳送到變電站內的解調儀進行解調。變電站內工控機可對采集到的拉力數據進行分析、存儲和分析,當出現各種異常情況時,系統會發出預警信號,提示管理人員對報警點進行查看和采取預防措施。該系統可以減少電網人員的巡線次數和提高巡線效率。
光纖Bragg光柵拉力傳感器性能決定著整個覆冰監測系統的監測結果,所以對傳感器進行性能測試實驗是必須的。胡練華,趙振剛等[10]在光纖Bragg光柵拉力傳感器不確定度標定實驗中,得到FBG拉力傳感器的靈敏度為0.161 kN/nm,線性度為1.769%FS。蔣建[11]研制了輸電線路覆冰監測光纖光柵拉力傳感器,其性能指標靈敏度為 0.048 9 kN/nm,線性度為0.78%FS,遲滯性誤差為1.47%FS。
1 桿塔受力的有限元分析
當輸電線路覆冰時,導線重量的變化會造成桿塔橫擔的變形,傳感器的性能取決于其安裝的位置,如果傳感器的安裝位置不對,傳感器的監測會由于桿塔的形變而受到影響。為了消除輸電線路覆冰時桿塔變形造成的傳感器監測數據的偏移,使用ANSYS軟件對桿塔受力進行有限元分析,傳感器的安裝位置以仿真結果作為依據。
由圖1和圖2可知,當桿塔橫擔在承受1 kN荷載時,形變的最大位移(DMX)數值為 0.021 358,求解形變的最大值(SMX)為 0.021 958;應力的最大位移(DMX)為 0.021 358,求解應力的最大值(SMX)為1.386,求解應力的最小值(SMN)為0.734E-05。應力分布最大和產生形變最大的位置是在桿塔橫擔的端部,而在桿塔橫擔的中間產生的形變和分布的應力都是最小的。
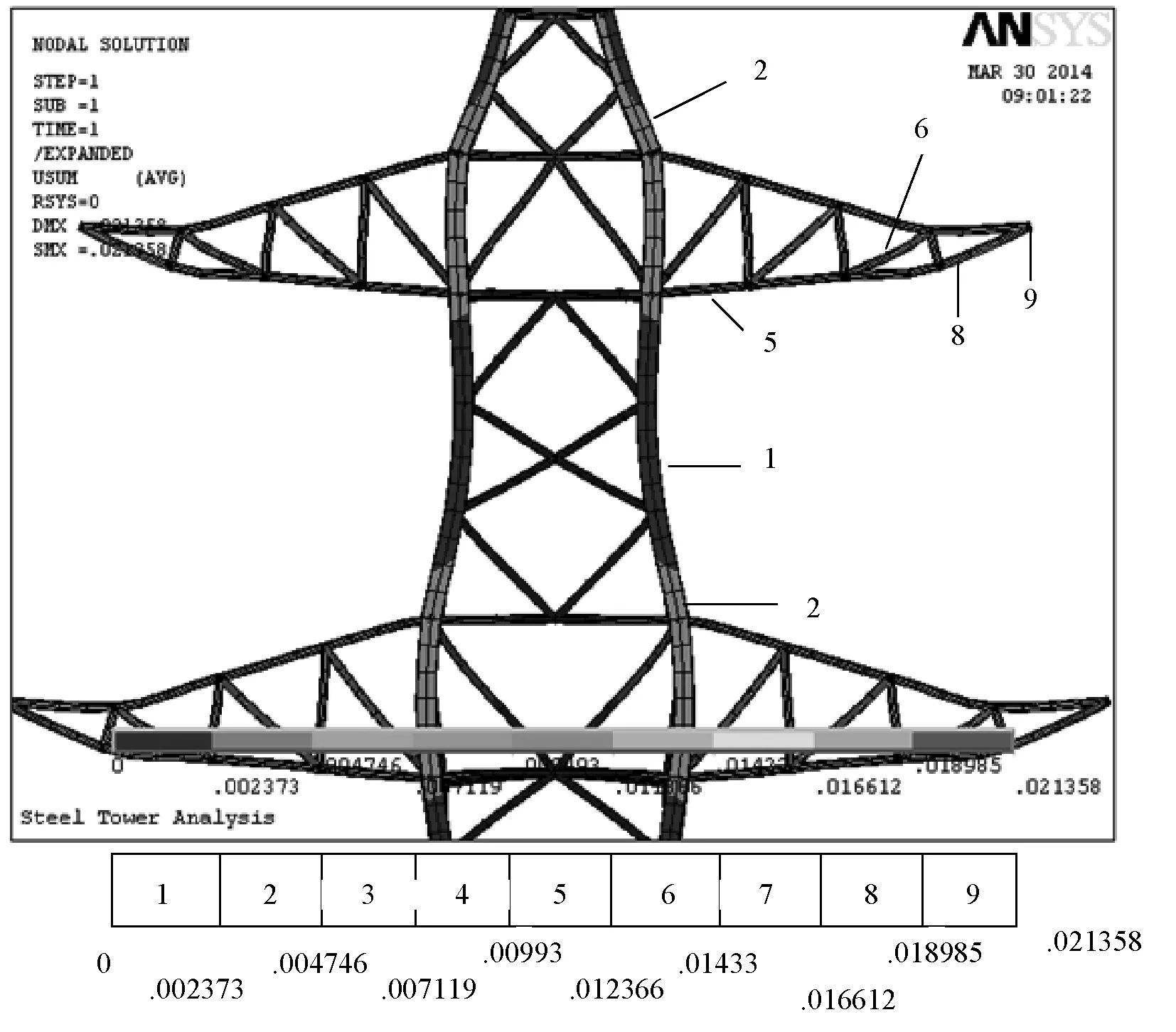
圖1 橫擔承受1 kN荷載時的形變云圖
由圖3和圖4可知,當桿塔橫擔承受3 kN荷載時,形變的最大位移(DMX)數值為 0.035 597,求解形變的最大值(SMX)為 0.035 597;應力的最大位移(DMX)為 0.035 497,求解應力的最大值
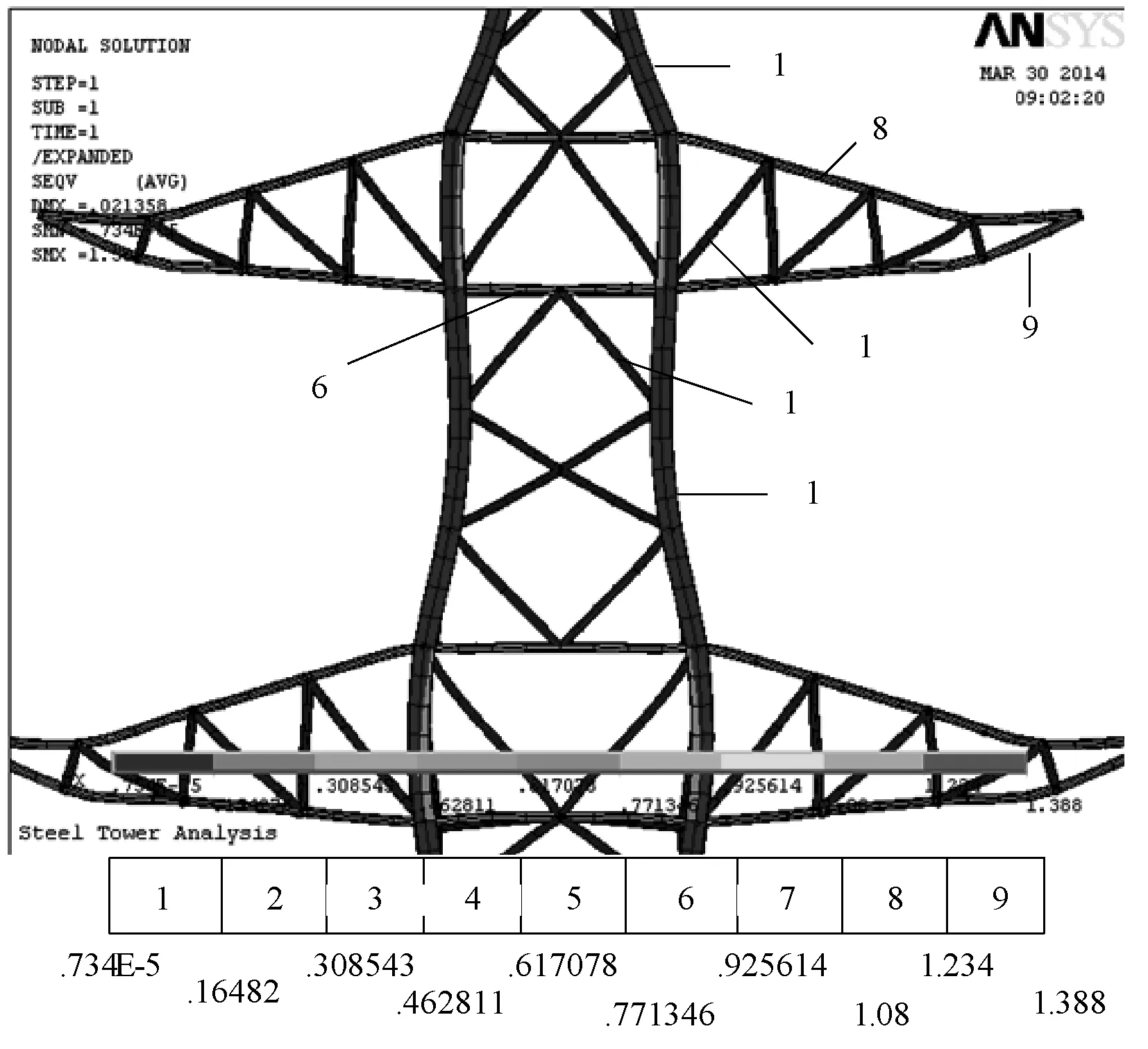
圖2 橫擔承受1 kN荷載時的應力分布云圖
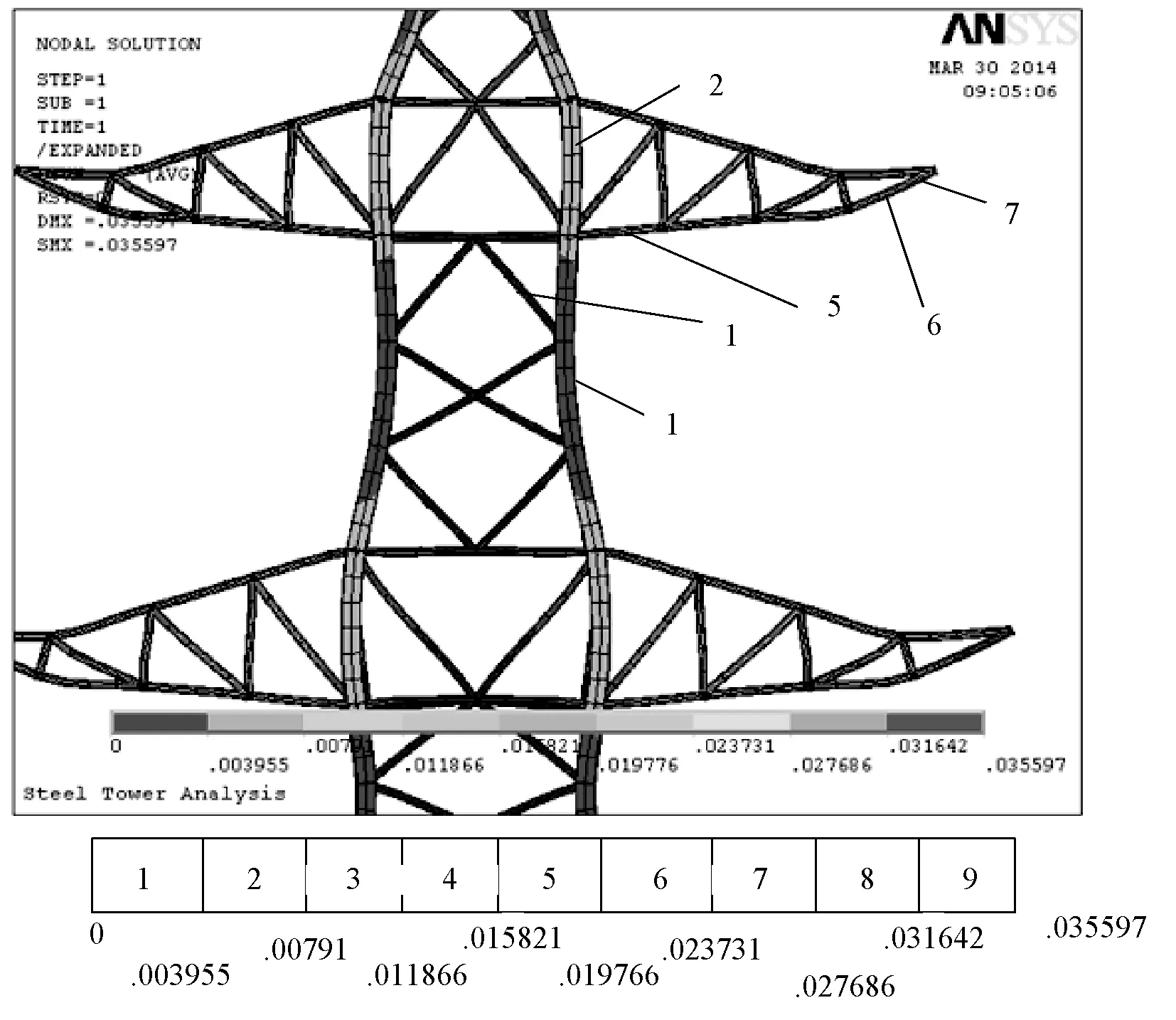
圖3 桿塔橫擔承受3 kN荷載時的形變云圖
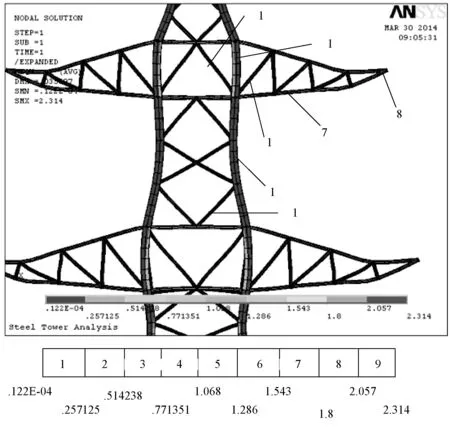
圖4 桿塔橫擔承受3 kN荷載時的應力分布云圖
(SMX)為2.314,求解應力的最小值(SMN)為0.122E-04。產生形變最大位置和應力分布最大位置同樣在桿塔橫擔端部處,而在桿塔橫擔中間位置產生的形變和應力分布最小。
通過對桿塔受力的有限元分析可知,當桿塔橫擔承受不同荷載時,在橫擔端部位置產生的形變最大,同時橫擔端部承受的應力也是最大的。所以桿塔橫擔端部是輸電線路覆冰時桿塔橫擔最容易斷裂的地方,應該在此處安裝拉力傳感器和角度傳感器。溫濕度傳感器由于其特殊的機械結構,在實際的安裝中要求安裝位置與安裝角度不能發生任何變化,所以溫濕度傳感器安裝于桿塔橫擔中間位置。
2 光纖Bragg光柵傳感原理
光纖Bragg光柵的中心反射波長可以表示為:
λB=2neffΛ
(1)
式中:λB為光纖Bragg光柵反射波的中心波長;neff為光纖的有效折射率;Λ為光柵周期。由(1)式知,光纖Bragg光柵反射波的中心波長λB隨著光纖的有效折射率neff和光柵周期Λ變化而改變,當外界力、溫度改變時都將使neff和Λ發生改變,通過測量反射波的中心波長偏移量能夠測量所需物理量。光纖Bragg光柵傳感器借助于外界裝置將被測參量轉化為溫度或者應變的變化,使得光纖Bragg光柵反射波的中心波長發生變化,以便達到要監測物理量的目的。
3 傳感器的性能測試
光纖Bragg拉力傳感器主要由光纖Bragg光柵、法蘭盤、鎧裝光纜、金屬光纜固定頭和不銹鋼件組成,光纖Bragg光柵固定于金屬外殼內,使用鎧裝光纜將兩端光纜引出,使用金屬光纜固定頭將其固定在法蘭盤。拉力傳感器受力是由于安裝的金具受力應變傳導而至,本質上拉力傳感器測量的是傳感器的金具產生的應變量。所以,光纖Bragg拉力傳感器測量量受到傳感器金具的材料、長度、橫截面積和傳感器安裝方式的影響。
光纖Bragg光柵拉力傳感器原理是當傳感器兩固定支點受到力的作用時,固定支點之間的距離發生了變化,使應變管發生了軸向形變,固定支點通過緊固管帶動光纖Bragg光柵形變,從而引起了光纖Bragg光柵波長移位變化,通過測量波長移位量可以測出對應的應變量。在該傳感器中,應變管所受外力產生的應變量按比例轉換為管內光纖Bragg光柵的應變量,以降低傳感器靈敏度,提高傳感器量程。當比例系數為k時,傳感器波長變化量與所受拉力之間關系為[10]:

(2)
式中:λ為拉力傳感器波長;E為不銹鋼件的彈性模量;S為拉力傳感器的橫截面積;Pe為光纖有效彈光系數。
設計傳感器外形時選擇了圓柱式結構,將光纖光柵安裝于鋁制殼體內,殼體能夠保護光纖光柵的作用,傳感器兩端一端安裝一個封閉的U型掛環,另一端安裝一個開口的U型掛環,開口U型掛環兩端打孔。此設計是為了不增加輸電線路的長度,將傳感器代替實際輸電線路垂直塔處的U型掛環(U-10)。實物如圖5所示。

圖5 光纖Bragg光柵拉力傳感器實物
為了對光纖Bragg光柵拉力傳感器進行標定實驗和計量實驗,設計了一個拉力測量系統。拉力傳感器系統由萬能拉力機、光纖Bragg光柵拉力傳感器、解調儀和工控機組成。圖6為拉力測量系統的原理圖。實驗過程中使用金具把光纖Bragg拉力傳感器與萬能拉力機連接,光纖Bragg光柵傳感器與解調儀使用FC跳線連接,工控機與解調儀使用USB數據線連接。實驗過程可分為4個步驟:步驟一,對拉力傳感器進行預負荷一次,萬能拉力機對傳感器施加負荷從0 kN增加到40 kN,再從40 kN逐漸減少到0 kN;步驟二,當傳感器處于空載狀態時,記錄傳感器空載時的波長;步驟三,設置拉力傳感器的檢測點,當萬能拉力機施加荷載為0 kN、10 kN、20 kN、30 kN、40 kN時分別保持3 min的時間觀察傳感器穩定后的波長;步驟四萬能拉力機對傳感器減小荷載,當荷載減小檢測點30 kN、20 kN、10 kN、0 kN時,同樣保持3 min的時間觀察傳感器中心波長。圖7為拉力傳感器與萬能拉力機的實驗現場布置。
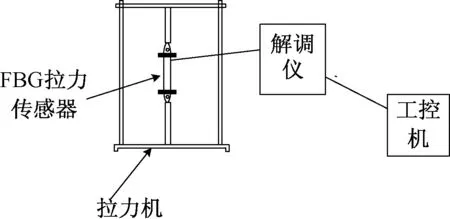
圖6 拉力測量系統原理圖

圖7 實驗現場布置
通過上述的測量系統,對光纖Bragg光柵拉力傳感器進行定標試驗和計量實驗。當室內溫度為25 ℃時對光纖Bragg拉力傳感器進行正反行程的測試,繪制出光纖Bragg光柵拉力傳感器拉力值與中心波長的特性曲線,并將其數據進行線性擬合,得出擬合曲線。如圖8和圖9所示。
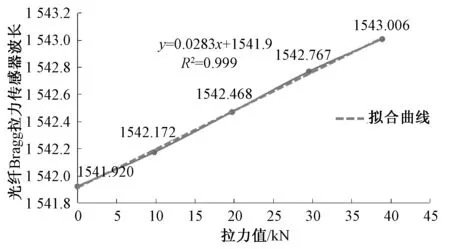
圖8 正行程校準曲線和擬合曲線
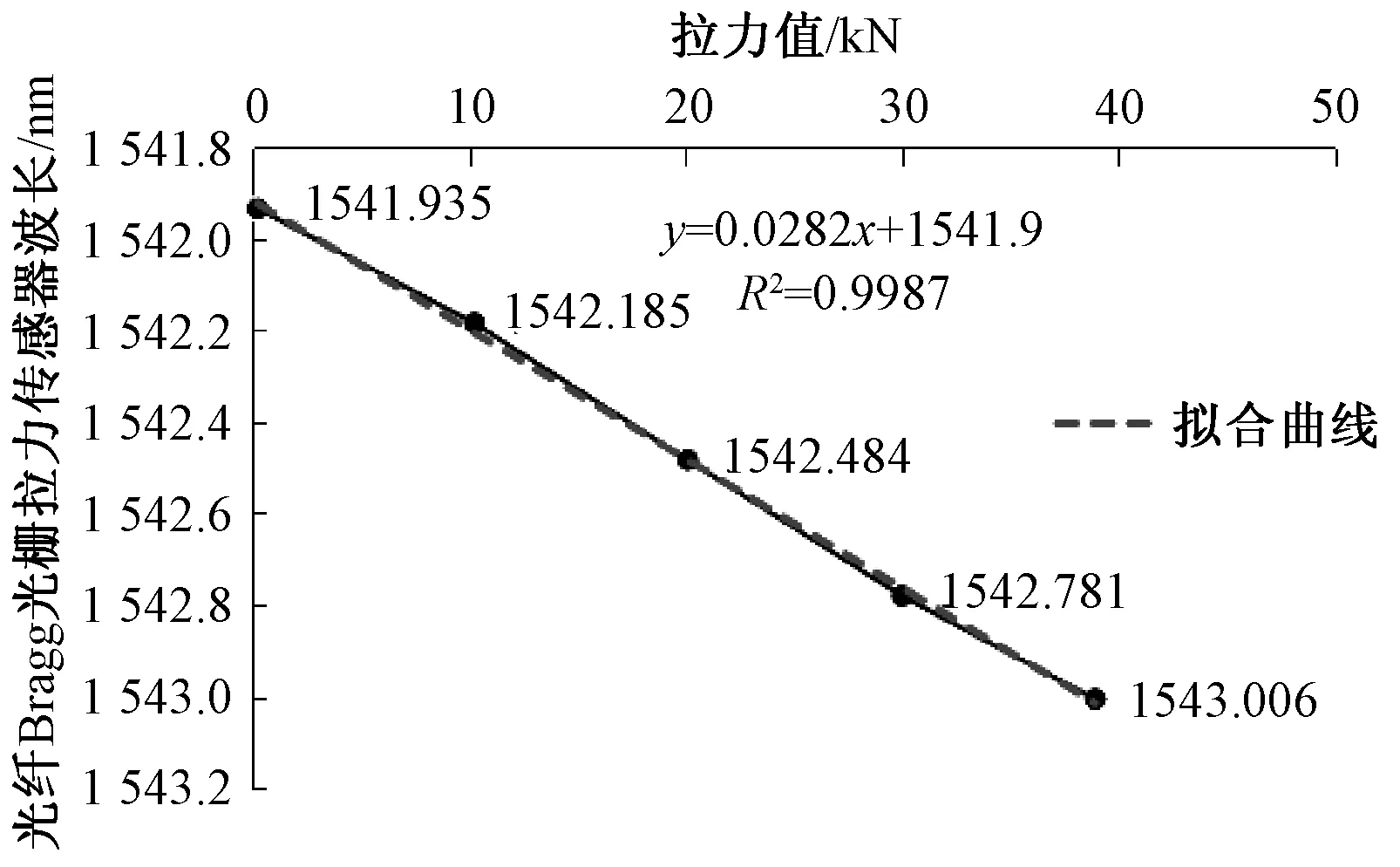
圖9 反行程校準曲線和擬合曲線
從圖8和圖9中可以看出,光纖Bragg光柵拉力傳感器的中心波長與拉力值幾乎呈現一個線性的趨勢,擬合曲線的決定系數R2為0.999,說明了擬合程度很好。正行程的擬合曲線表達式為:y=0.028 3x+1 541.9,反行程的擬合曲線表達式為:y=0.028 2x+1 541.9。其中,0.028 3為光纖Bragg光柵拉力傳感器正行程的靈敏度,0.028 2為光纖Bragg光柵拉力傳感器的反行程靈敏度。
分別對正反行程的擬合曲線進行分析研究,傳感器校準曲線與擬合直線間的最大偏差與滿量程輸出的百分比為線性度[10]。從圖8和圖9中可以看出,傳感器正行程的最大偏差為0.008 nm,反行程的最大偏差為0.01 nm,傳感器正、反行程的線性度分別為:
×100%=0.743%FS
(3)
(4)
遲滯特性是傳感器在測量范圍內,正行程與反行程中輸入—輸出特性不重合的程度[11]。圖8與圖9中能夠發現,正、反行程最大偏差為0.016 nm,光纖Bragg光柵拉力傳感器的遲滯誤差為:
×100%=1.28%FS
(5)
4 光纖傳感器的組網聯調
為了保證施工的順利進行,在實驗室對即將施工的3個FBG拉力傳感器、一只溫濕度傳感器、2只小角度傳感器和1只大角度傳感器進行光纖傳感器的組網,如圖10所示。解調儀發出光源經過15 km模擬損耗,接到分光器,分光器40%端通過熔纖和光纖傳感器網絡連接,電腦和解調儀通過USB數據線連接,觀察系統軟件光柵個數。
圖10 光纖傳感器組網聯調光路圖
當解調儀發出的光源經過光纖光柵傳感器后反射回去的光信號通過解調儀解調后在系統界面能夠看到每個光柵的波峰以及波峰能量值,如圖11所示光纖光柵傳感器網絡的12個光柵能量峰值較好,適用于現場施工。
圖11 調試界面
5 掛網試運行
光纖Bragg光柵拉力傳感器已經與2017年10月在云南省昭通彝良縣某110 kV輸電線路掛網運行,將桿塔上現有的U型掛環替換為拉力傳感器吊掛在玻璃絕緣子串的上端,注意觀察傳感器的尾纖,確保尾纖的不折斷。
傳感器現場安裝如圖12所示。

圖12 傳感器現場安裝圖
將金屬軟管上夾具固定在桿塔上,尾纖用黑色扎絲就近捆綁在拉力計的金屬軟管上(至少捆綁3處,該夾具上大螺絲在鎖緊時不可損傷大傾角傳感器的尾纖),再以不銹鋼扎帶或黑色扎絲將光纜捆綁在塔桿上,注意走線盡量順沿塔桿,要求美觀、不凌亂,最后在光交箱內熔接光纖頭。
6 結論
基于光纖傳感技術設計了一種輸電線路覆冰監測系統,通過ANSYS對輸電線路桿塔受力進行有限元分析,以仿真結果為依據確定拉力傳感器與傾角傳感器安裝于桿塔橫擔端部位置,溫濕度傳感器安裝于桿塔橫擔中間位置。研制了用于監測覆冰的光纖Bragg光柵拉力傳感器,通過對傳感器的標定實驗,得出了所研制的拉力傳感器靈敏度為0.028 2 nm/kN,線性度為0.743%FS,遲滯誤差為1.28%FS,相對于文獻[10,11]光纖Bragg光柵傳感器的性能得到提升。在實驗中采用的光纖Bragg光柵傳感器和標定的儀器符合檢定要求。
本文中所研制的光纖Bragg拉力傳感器通過OPGW光纜傳輸光信號,無需現場供電,具有強抗電磁干擾能力,適用于架空輸電線路上的覆冰監測。