基于模擬的反導(dǎo)預(yù)警雷達(dá)目標(biāo)交接搜索景幅設(shè)置研究
2018-09-07 03:20:22李凌鵬
上海航天 2018年4期
關(guān)鍵詞:優(yōu)化
李凌鵬,王 進(jìn),王 剛
(1.空軍預(yù)警學(xué)院,湖北 武漢 430019; 2.空軍工程大學(xué) 防空反導(dǎo)學(xué)院,陜西 西安 710038)
0 引言
在反導(dǎo)預(yù)警作戰(zhàn)過(guò)程中,通常由遠(yuǎn)程預(yù)警相控陣?yán)走_(dá)(EWR)和多功能地基相控陣?yán)走_(dá)(GBR)共同完成對(duì)彈道導(dǎo)彈的探測(cè)、跟蹤與識(shí)別任務(wù)。EWR波束較寬,主要負(fù)責(zé)對(duì)彈道導(dǎo)彈的大范圍搜索和監(jiān)視;GBR波束較窄,跟蹤精度較高,主要負(fù)責(zé)精確跟蹤和目標(biāo)識(shí)別。兩類(lèi)雷達(dá)之間的目標(biāo)交接是實(shí)戰(zhàn)中必須面對(duì)和首要解決的問(wèn)題。
目前,國(guó)內(nèi)外對(duì)雷達(dá)目標(biāo)交接問(wèn)題的研究主要集中于目標(biāo)匹配[1]、波位編排[2-3]、搜索優(yōu)化[4-6]、監(jiān)視空域[7-8]、部署優(yōu)化[9-10]等方面。它們研究前提是雷達(dá)的搜索空域已知,但從實(shí)際作戰(zhàn)需求來(lái)看,在EWR和GBR目標(biāo)交接時(shí),如何確定GBR的最合理搜索空域才是反導(dǎo)預(yù)警作戰(zhàn)任務(wù)規(guī)劃迫切需要解決的問(wèn)題。即在EWR向GBR指示目標(biāo)時(shí),GBR在多大范圍(由距離、方位角、俯仰角,以及徑向速度所組成的四維空間區(qū)域),采取什么信號(hào)形式實(shí)現(xiàn)最快、最穩(wěn)地搜索捕獲目標(biāo)。一般情況下,景幅較大時(shí),目標(biāo)穿越時(shí)間長(zhǎng),有利于提高發(fā)現(xiàn)概率,但雷達(dá)搜索時(shí)間長(zhǎng),搜索數(shù)據(jù)率低,不利于快速發(fā)現(xiàn)和截獲目標(biāo);景幅較小時(shí),雷達(dá)搜索發(fā)現(xiàn)目標(biāo)快,但目標(biāo)運(yùn)動(dòng)速度較快時(shí),目標(biāo)在景幅內(nèi)時(shí)間短,不利于目標(biāo)截獲。在空間目標(biāo)分布較多或有目標(biāo)分離時(shí),對(duì)景幅的選擇要求更高。
因此,本文結(jié)合相控陣?yán)走_(dá)的特點(diǎn)和作戰(zhàn)需要,將目標(biāo)捕獲景幅設(shè)置問(wèn)題轉(zhuǎn)換為優(yōu)化問(wèn)題,即在GBR能量資源有限的情況下,如何設(shè)置雷達(dá)搜索景幅使目標(biāo)捕獲概率最大。具體思路為:根據(jù)EWR的指示位置,結(jié)合EWR的探測(cè)參數(shù),通過(guò)隨機(jī)模擬生成目標(biāo)真實(shí)位置;結(jié)合GBR的探測(cè)參數(shù),按照目標(biāo)截獲概率最大原則,以及目標(biāo)被GBR搜索景幅覆蓋、目標(biāo)被GBR截獲2個(gè)約束條件,建立優(yōu)化模型;通過(guò)Crystal Ball的優(yōu)化計(jì)算功能,運(yùn)用蒙特卡洛方法模擬求解最優(yōu)的GBR搜索景幅,為作戰(zhàn)單位的在線(xiàn)任務(wù)規(guī)劃提供科學(xué)、簡(jiǎn)易的方法和原則。
1 相控陣?yán)走_(dá)搜索景幅選擇原則
景幅最優(yōu)選擇主要依據(jù)雷達(dá)作用距離方程和目標(biāo)截獲概率的分析計(jì)算。但在實(shí)際工作中,要合理選擇景幅必須注意以下原則:
1) 在彈道導(dǎo)彈目標(biāo)穿越搜索空域的方式不能確定時(shí),需要考慮目標(biāo)各種可能的穿越方式,并分別計(jì)算雷達(dá)截獲概率。
2) 彈道導(dǎo)彈目標(biāo)的子彈頭先后分離時(shí),選擇景幅需要充分考慮對(duì)各個(gè)彈頭目標(biāo)的可靠截獲。在前后2個(gè)目標(biāo)分離間隔時(shí)間較長(zhǎng)時(shí),可以考慮變景幅截獲。
3) 在難以兼顧所有目標(biāo)時(shí),要根據(jù)需求,確保對(duì)重點(diǎn)目標(biāo)的可靠截獲。
4) 搜索景幅的選擇既要考慮到搜索范圍能覆蓋目標(biāo)區(qū)域并留有一定的驗(yàn)證、處理和操作時(shí)間,又要考慮到盡量縮短搜索時(shí)間以提高脈沖積累和數(shù)據(jù)率。
2 相控陣?yán)走_(dá)搜索景幅選擇方法
2.1 生成隨機(jī)數(shù)的方法
生成隨機(jī)數(shù)的方法依據(jù)以下定理:
設(shè)r是服從[0,1]均勻分布的隨機(jī)變量,x的分布函數(shù)為F(x),則
x=F-1(r)
(1)
2.2 模擬生成目標(biāo)真實(shí)位置
圖1為EWR波束與目標(biāo)的位置關(guān)系示意圖。設(shè)原點(diǎn)O為EWR對(duì)目標(biāo)的指示位置,M點(diǎn)為目標(biāo)的真實(shí)位置,EWR探測(cè)目標(biāo)距離為Rp,波束寬度為θpx、θpy,令波束寬度覆蓋范圍為[-x0,x0]、[-y0,y0],則x0=Rp·θpx/2,y0=Rp·θpy/2。對(duì)第i次模擬,由于橫向誤差與系統(tǒng)誤差的存在,目標(biāo)指示位置不一定是目標(biāo)真實(shí)位置。

圖1 EWR波束與目標(biāo)的位置關(guān)系示意圖Fig.1 Schematic diagram of relation between EWR and target’s position
1) 產(chǎn)生[0,1]均勻分布的隨機(jī)數(shù)ri,rj。
(2)
(3)

1) 產(chǎn)生[0,1]均勻分布的隨機(jī)數(shù)ri,rj。
2) 產(chǎn)生標(biāo)準(zhǔn)正態(tài)分布N(0,1)的隨機(jī)數(shù)ui,vi,
(4)
(5)
3) 計(jì)算目標(biāo)真實(shí)位置
(6)
(7)
2.3 建立搜索景幅最優(yōu)化模型
設(shè)GBR設(shè)置捕獲目標(biāo)的距離為Rx,探測(cè)方位范圍為α,仰角厚度為β,波束寬度分別為θxx,θxy。
1) 判斷目標(biāo)是否在雷達(dá)搜索景幅內(nèi)
(8)
2) 計(jì)算目標(biāo)在雷達(dá)搜索范圍內(nèi)的飛行距離(飛行方向不確定):
a) 產(chǎn)生[0,1]均勻分布的隨機(jī)數(shù)ri,rj。
b) 計(jì)算目標(biāo)在雷達(dá)搜索景幅內(nèi)的飛行距離,有
(9)
(10)
3) 判斷目標(biāo)是否被雷達(dá)搜索發(fā)現(xiàn)。設(shè)GBR脈沖重復(fù)周期為t,每次發(fā)射脈沖數(shù)為n,則搜索完整個(gè)空域用時(shí)
(11)
當(dāng)目標(biāo)穿越GBR搜索景幅時(shí),雷達(dá)發(fā)現(xiàn)目標(biāo)的條件是雷達(dá)波束掃描到目標(biāo)2次以上,才能確保高概率截獲,即
(12)
當(dāng)來(lái)襲導(dǎo)彈射程為3 500 km時(shí),導(dǎo)彈最大速度v小于4 km/s,其分量vx,vy服從[0,4]之間的均勻分布。
4)計(jì)算截獲概率。彈道導(dǎo)彈屬Swerling Ⅲ型目標(biāo)。針對(duì)Swerling Ⅲ型目標(biāo),多脈沖檢測(cè)概率與虛警概率、信噪比的關(guān)系式[11]簡(jiǎn)化為
(13)
文獻(xiàn)[12]給出了單脈沖情況下的信噪比RSN的計(jì)算模型
(14)

2次累積發(fā)現(xiàn)概率為
P=1-(1-Pd2
(15)
5) 建立優(yōu)化模型。確定GBR的搜索景幅,就是確定GBR搜索的方位范圍、仰角范圍、信號(hào)形式。從美軍公開(kāi)的GBR雷達(dá)作戰(zhàn)數(shù)據(jù)來(lái)看,搜索窗的方位范圍、仰角范圍均不超過(guò)10°,發(fā)射脈沖數(shù)量不超過(guò)16個(gè),這些數(shù)據(jù)可作為優(yōu)化模型的約束條件,并可適當(dāng)擴(kuò)大范圍。同時(shí),對(duì)戰(zhàn)術(shù)彈道導(dǎo)彈而言,3 500 km的目標(biāo),飛行速度不超過(guò)4 km/s。以GBR雷達(dá)的目標(biāo)發(fā)現(xiàn)概率為目標(biāo)函數(shù),設(shè)GBR截獲概率P與搜索景幅的方位范圍α(設(shè)α不超過(guò)20°)、仰角范圍β(設(shè)β不超過(guò)20°)、每個(gè)波位發(fā)射脈沖數(shù)n(設(shè)n不超過(guò)16)的關(guān)系為
maxP=f(α,β,n)
(16)
3 計(jì)算分析
以美軍的EWR向THAAD GBR雷達(dá)[13]進(jìn)行目標(biāo)交接為例展開(kāi)分析。EWR目標(biāo)交接參數(shù)見(jiàn)表1,GBR目標(biāo)交接參數(shù)見(jiàn)表2。

表1 EWR目標(biāo)交接參數(shù)

表2 GBR目標(biāo)交接參數(shù)
1) 目標(biāo)交接距離對(duì)GBR搜索景幅的影響分析。調(diào)用Crystal Ball(水晶球,一種插件)的優(yōu)化計(jì)算功能進(jìn)行仿真,仿真變量設(shè)置見(jiàn)表3,仿真置信度設(shè)為0.95。

表3 仿真變量設(shè)置
當(dāng)Rx=1 500km時(shí),Rp取不同值時(shí),求得α,β,n,P見(jiàn)表4。

表4 EWR目標(biāo)交接距離對(duì)GBR搜索景幅的影響
EWR目標(biāo)指示的距離越遠(yuǎn),其橫向誤差越大,導(dǎo)致目標(biāo)位置誤差分布擴(kuò)大,從而使GBR搜索景幅范圍增大。由于搜索周期是作戰(zhàn)既定的,所以導(dǎo)致脈沖積累數(shù)減少,發(fā)現(xiàn)概率降低。
當(dāng)Rp=2 000 km,Rx取不同值時(shí),求得α,β,n,P見(jiàn)表5。

表5 GBR目標(biāo)交接距離對(duì)GBR搜索景幅的影響
GBR搜索目標(biāo)的距離越近,視場(chǎng)越小,為保證對(duì)高速目標(biāo)的截獲,應(yīng)擴(kuò)大搜索景幅范圍。由于搜索周期是作戰(zhàn)既定的,所以導(dǎo)致脈沖積累數(shù)減少,發(fā)現(xiàn)概率降低。
2) 目標(biāo)飛行方向?qū)BR搜索景幅影響分析。當(dāng)Rp=2 000 km,Rx=1 500 km,預(yù)測(cè)目標(biāo)飛行方向不同時(shí),求得α,β,n,P見(jiàn)表6。
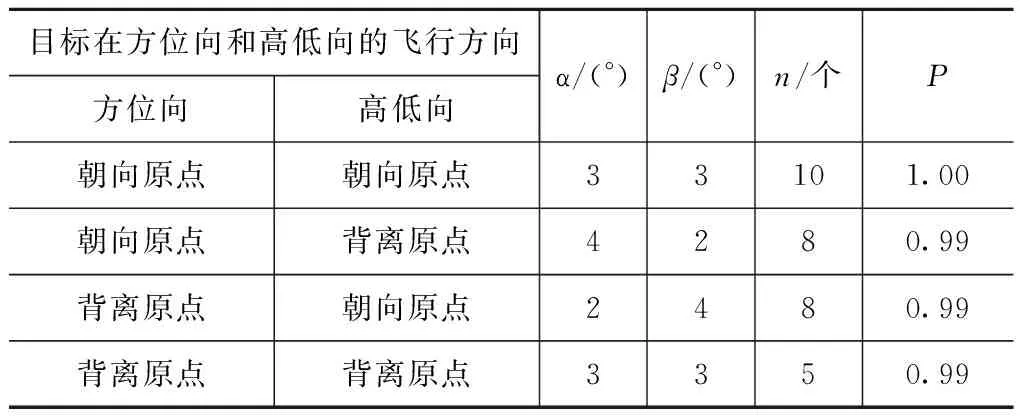
表6 目標(biāo)飛行方向?qū)BR搜索景幅的影響
當(dāng)EWR預(yù)測(cè)出目標(biāo)的飛行方向時(shí)(即提供先驗(yàn)信息),若目標(biāo)在方位向或高低向朝原點(diǎn)飛行時(shí),則GBR搜索景幅范圍較小。若目標(biāo)在方位向和高低向朝(或背離)原點(diǎn)飛行時(shí),則GBR搜索景幅范圍稍有擴(kuò)大。
3) EWR目標(biāo)指示精度對(duì)GBR搜索景幅影響分析。當(dāng)Rp=2 000 km,Rx=1 500 km,EWR探測(cè)精度取不同值時(shí),求得α,β,n,P見(jiàn)表7。

表7 EWR目標(biāo)指示精度對(duì)GBR搜索景幅的影響
EWR探測(cè)精度越差,GBR搜索景幅范圍越大,脈沖積累數(shù)越小,發(fā)現(xiàn)概率越低。因此,在選擇目標(biāo)交接方式時(shí),若目標(biāo)均在EWR和GBR的探測(cè)威力范圍內(nèi),且EWR的可調(diào)度資源比較充裕時(shí),應(yīng)采用握手交接。即EWR保持對(duì)目標(biāo)的跟蹤濾波,每次通過(guò)濾波器時(shí)對(duì)下一時(shí)刻的位置和速度進(jìn)行預(yù)測(cè),將其提供給GBR,GBR通過(guò)少數(shù)幾個(gè)波束即可覆蓋EWR的探測(cè)誤差管道,從而快速截獲目標(biāo);若目標(biāo)在EWR或GBR的探測(cè)威力范圍外,或者EWR由于其他客觀因素?zé)o法獲得更多觀測(cè)信息來(lái)提高導(dǎo)彈狀態(tài)估計(jì)精度時(shí),應(yīng)采用預(yù)報(bào)交接。此時(shí)EWR利用已有觀測(cè)信息估計(jì)導(dǎo)彈狀態(tài)、預(yù)測(cè)飛行軌跡,直到落點(diǎn),并將此作為引導(dǎo)信息提供給GBR。預(yù)測(cè)誤差管道隨著時(shí)間的延長(zhǎng)而顯著增加,加大了GBR截獲目標(biāo)的難度。
4 結(jié)束語(yǔ)
本文從作戰(zhàn)需求出發(fā),用蒙特卡洛方法建立了GBR目標(biāo)交接搜索景幅優(yōu)化模型,分析了目標(biāo)交接距離、飛行方向和雷達(dá)探測(cè)精度等因素對(duì)搜索景幅設(shè)置的影響,仿真結(jié)果表明:該方法簡(jiǎn)單易行,能顯著提高任務(wù)規(guī)劃效率和雷達(dá)搜索效能,具有較強(qiáng)的實(shí)踐意義。考慮到目標(biāo)交接涉及到多目標(biāo)問(wèn)題,以及雷達(dá)探測(cè)受電離層、天氣等因素的影響,下一步將細(xì)化完善所建模型,增強(qiáng)方法的完備性和實(shí)用性,以滿(mǎn)足實(shí)戰(zhàn)化需要。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45