考慮伺服回路動態的飛行器攻角魯棒控制技術
2018-09-07 03:27:58楊廣慧杜立夫劉曉東
上海航天 2018年4期
楊廣慧,杜立夫,劉曉東
(北京航天自動控制研究所,北京 100854)
0 引言
日趨復雜的現代戰場環境對飛行器,尤其是戰術導彈提出了輕質化和高動態的雙重要求,然而輕質化的實現會在一定程度上降低伺服的動態特性,造成其姿控回路與伺服回路的頻譜分離不夠明顯。傳統的飛行器姿態控制設計方法通常將姿控回路和伺服回路分開設計,并未充分考慮兩者之間的交聯影響,導致兩者之間缺乏有機的協調匹配,無法充分發揮飛行器的最大潛力。此外,為更好地實現制導任務要求,飛行器控制系統會對其伺服系統提出較高的技術指標要求,增加伺服回路的設計難度,因此需要研究考慮伺服回路特性的姿態控制設計方法,從而降低對伺服回路的性能指標要求。為提高飛行器姿控系統的整體性能指標,研究考慮伺服回路動態的姿態控制設計方法極為必要。
對于飛行器這類非線性系統,通常采取多魯棒面控制與反演設計相結合的方法[1-3]。但是,傳統反演方法中的連續微分會帶來“計算爆炸”問題。為解決此問題,SWAROOP等[4]提出了一種動態面控制方法。該方法通過引入若干組低通濾波器避免了對虛擬指令的直接微分,具有較高的工程實用價值,得到了國內外學者的廣泛關注,并被應用于飛行器的制導控制設計中[5-9]。本文在此基礎上,以飛行器俯仰通道為例,借助多魯棒面控制和動態面控制理論,提出了一種考慮伺服回路動態的攻角控制設計方法。此外,滑模變結構控制方法具有設計簡單、魯棒性強等特點,自首次被提出以來,得到了廣泛的研究,并在工程實踐中逐漸得到推廣和應用[10-11]。因此,在分層設計時,本文將滑模變結構控制理論納入考慮范圍,以提高攻角控制方案的魯棒性能。為衡量不同控制方案下姿控系統的綜合性能,體現本文所提出的控制方案的性能優勢,提出了一個用于評價綜合性能的指標函數,該函數是關于攻角跟蹤誤差與控制舵偏量的加權。
1 問題描述
俯仰通道的姿態運動方程組為
(1)
式中:α和θ分別為飛行器攻角和彈道傾角;m和v分別為飛行器質量和速度;g為重力加速度;ωz為俯仰角速率;Jz為轉動慣量;q,S和L分別為動壓、參考面積和參考長度。氣動升力系數CY和俯仰力矩系數Cz的表達式為
(2)

因此,當未考慮伺服回路動態時,面向攻角控制的設計模型為
(3)

為便于設計,電動伺服回路的動態特性可簡化為一個二階線性環節,即
(4)
式中:ωn為電動伺服系統的自然振蕩角頻率;ξn為電動伺服系統的阻尼比;δzd為電動伺服系統的輸入指令。其中,ωn和ξn的選取需體現伺服回路帶寬和動態的設計要求。與式(4)對應的時域表達式為
(5)
因此,當考慮伺服回路動態時,面向攻角控制的設計模型為
(6)
式(3)、(6)建立的數學模型為下一步飛行器攻角控制律的設計奠定了基礎。下一節將基于此模型進行攻角控制律的設計。
2 動態面攻角控制律設計
形如式(3)、(6)所示的非線性系統,通常采取反演與多魯棒面控制相結合的控制方式。但是,傳統反演方法中的連續微分會帶來“計算爆炸”問題。為避免此現象的發生,可采用動態面控制方法[4]。該方法通過引入若干個低通濾波器避免了對虛擬指令的直接微分,具有較高的工程實用價值。同時,因滑模變結構控制方法設計方便,且具備針對外界干擾和參數攝動的強魯棒性能,故本文在分層設計時將采用該方法。
針對雙層結構的設計模型(3),即未考慮伺服回路動態時,動態面攻角控制律為
(7)
式中:αd為攻角指令;濾波器系數η>0;k1,q1,k2,q2為控制系數,其值均大于零。
而針對3層結構的設計模型(6),即考慮伺服回路動態時,動態面攻角控制律則變為
(8)
式中:濾波器系數η1>0,η2>0;控制系數k3>0,q3>0。
下面將重點分析在采用本文所提出的控制算法(8)時攻角控制系統的穩定性。作為分析的前提,首先給出2個具有可行性的假設條件。
假設1系統中的不確定項均是有界的,且滿足dα≤κα,dz≤κz,dm≤κm。
假設2當采用動態面控制方法時,低通濾波器的輸出信號yfo與輸入信號yfi的差值是有界的,且滿足yfo-yfi≤κfy。
基于上述2個假設條件,給出本文所提方案下攻角控制系統的穩定性定理。
定理1對于具有3層級聯結構的含伺服環節的設計模型(6),采用動態面攻角控制律(8),當滿足式(9)條件時,飛行器實際攻角α將漸近收斂于指令攻角αd,即攻角控制系統漸近穩定。
(9)
證明采用滑模面變量構建Lyapunov函數
(10)
對Lyapunov函數進行微分計算,得到
(11)
由式(6)、(8)可得
(12)
當采用動態面方法時,有ωzc=ωzd+dfz。因此,式(12)可改寫為
(13)
式中:不確定性變量ds1=dα+dfz是有界的,且滿足ds1≤κs1=κα+κfz。
然后,將角速度虛擬控制律代入式(13)可得
(14)
同樣,由式(6)、(8)可得
(15)
-k3s3-q3sgn(s3)+dm
(16)
(17)
式中:ds2=dz+b2dfm是有界的,且滿足ds2≤κs2=κz+b2κfm。
此時,由式(14)、(17)可得
s2-k1s1-q1sgn(s1)+ds1s1+
-k2s2-q2sgn(s2)+ds2s2=
-k1s12-k2s22+s1s2-q1s1+
ds1s1-q2s2+ds2s2≤
κs1s1-q2s2+κs2s2=
q1-κs1s1-q2-κs2s2
(18)
由式(7)、(8)可看出,在未考慮伺服回路動態時,解算出的舵偏角指令為δzd;而在考慮伺服回路動態時,解算出的舵偏角指令變為δzd*。這體現出2種設計方法之間的區別。顯然,控制律(8)中包含了伺服回路的動態特性參數。此外,為防止控制量的高頻抖動,用如下飽和函數來替代符號函數,即
(19)
可以證明,當采用飽和函數代替符號函數后,若同樣滿足定理1中的條件,則控制系統的Lypanonov漸近穩定性將退變為有界穩定性。此外,我們可通過調節參數η來減小收斂域界值。實際上,參數η的選取應折中考慮系統收斂精度與控制平滑程度。
至此,在未考慮/考慮伺服回路動態時,即分別考慮雙環結構設計模型(3)和三環結構設計模型(6)時,飛行器攻角魯棒控制律設計完畢。
3 仿真結果
本節將通過計算機仿真,驗證本文所提出的控制方案相比于未考慮伺服回路控制方案的性能優勢。

仿真中,當未考慮伺服回路動態時,攻角控制律的參數為:k1=20,q1=2,k2=20,q2=2。當考慮伺服回路動態時,攻角控制律的參數為:k1=30,q1=5,k2=30,q2=10,c=500,k3=30,q3=5。 伺服回路的階躍響應曲線如圖1所示。
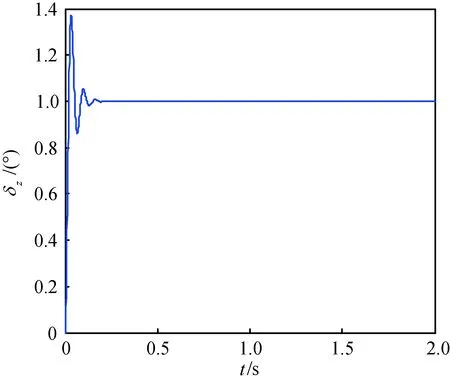
圖1 伺服回路的階躍響應曲線Fig.1 Step response curve of servo loop
將如圖1所示的伺服回路置于飛行器攻角控制系統中,然后比較2種控制方案下的攻角跟蹤曲線,如圖2所示。由圖2可知,當設計中考慮伺服回路動態時,飛行器攻角跟蹤的響應速度更快,同時穩態精度更高。
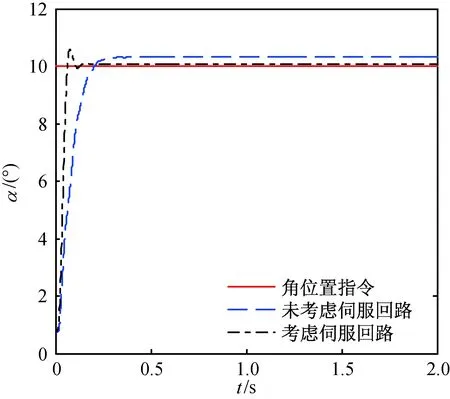
圖2 2種控制方案下攻角跟蹤曲線Fig.2 Attack angle tracking curves under two control schemes
為更為直觀地比較2種控制方案下攻角控制系統的綜合性能情況,將性能指標函數定義為

(20)
式中:第1項為跟蹤誤差相關項,第2項為控制消耗相關項。
2種控制方案下攻角控制系統的性能指標曲線如圖3所示。由圖3可知,當設計中考慮伺服回路動態時,攻角控制系統的綜合性能指標值更小,即具有更優越的綜合性能,體現出本文所提出的控制方案的優勢。
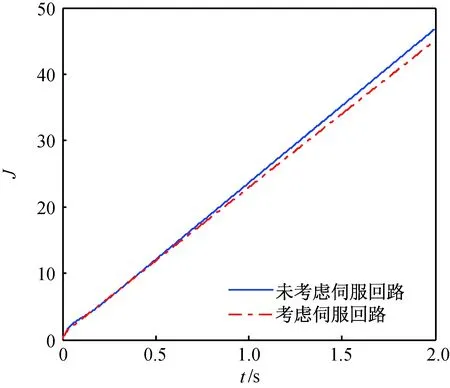
圖3 2種控制方案下性能指標曲線Fig.3 Performance index curves under two control schemes
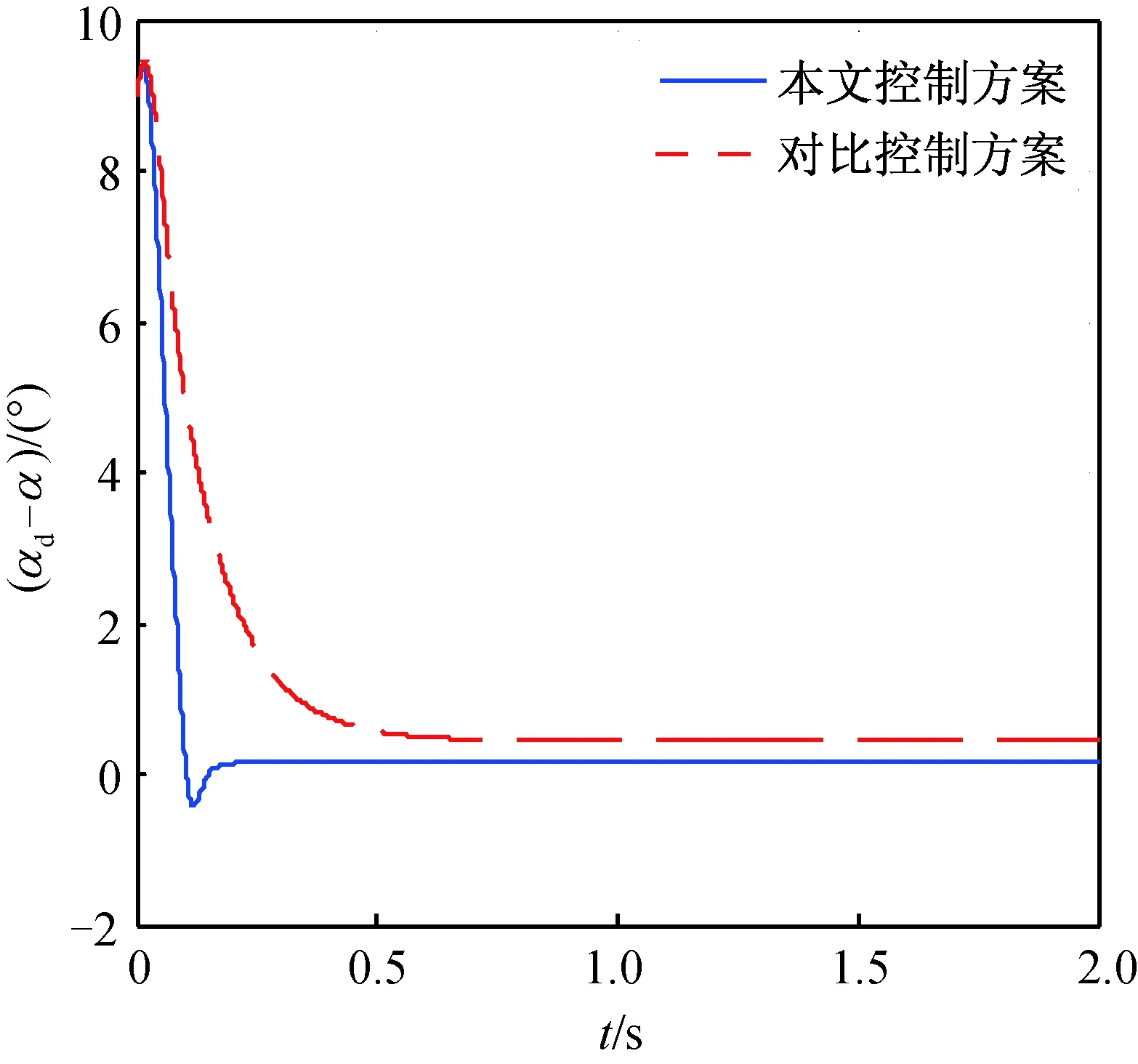
圖4 2種控制方案下跟蹤誤差曲線Fig.4 Tracking error curves under two control schemes
同時,為了體現本文所提出控制方案的魯棒性,下面將對比未包含魯棒項的控制方案,其控制律參數為:k1=30,q1=0,k2=30,q2=0,c=500,k3=30,q3=0。于是,2種控制方案下階躍響應的跟蹤誤差曲線如圖4所示。由圖4可以看出,在存在不確定因素的情況下,相比未考慮魯棒項的控制方案,本文控制方案下攻角跟蹤的響應速度更快,穩態精度更高,從而直觀體現出其控制性能優勢,進而反映出系統魯棒性能的提升。
4 結論
為提高姿控外回路和伺服內回路的協調匹配性,本文提出了一種考慮伺服回路動態的攻角魯棒控制設計方法。采用滑模控制與動態面控制相結合的方法,實現了對象3層子系統之間的有效級聯。計算機仿真結果表明:相比于未考慮伺服回路動態的姿控設計方法,本文所提出的控制方案具有更好的攻角跟蹤效果和更優越的綜合性能指標,包括跟蹤誤差和控制能量消耗。該控制方案結構清晰,便于工程實現,可重點應用于具有高動態和輕質化要求的飛行器姿態控制領域,并可推廣應用于飛行器全通道姿態控制。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56