混合動力汽車動力轉(zhuǎn)換性能仿真分析*
2018-09-05 06:43:14郭家田徐建喜
汽車工程師 2018年7期
關(guān)鍵詞:經(jīng)濟(jì)性汽車
郭家田 徐建喜
(1.山東科技職業(yè)學(xué)院;2.天津職業(yè)技術(shù)師范大學(xué))

針對不同的動力需求,混合動力系統(tǒng)運(yùn)行工況可分為純電動工況、純發(fā)動機(jī)工況、發(fā)動機(jī)/電動機(jī)混合驅(qū)動工況、發(fā)動機(jī)驅(qū)動電動機(jī)發(fā)電工況、能量回收工況及停車充電工況,通過各工況的合理分配能夠提高車輛的燃油經(jīng)濟(jì)性并降低排放[1]。ADVISOR仿真軟件可實(shí)現(xiàn)汽車性能仿真分析[2],文獻(xiàn)[3-5]對混合動力汽車發(fā)動機(jī)和電動機(jī)切換控制進(jìn)行了研究。文章采用ADVISOR仿真軟件對汽車發(fā)動機(jī)與電動機(jī)在不同動力切換車速下汽車動力性、經(jīng)濟(jì)性及排放性進(jìn)行仿真,分析混合動力汽車在不同動力切換車速下的優(yōu)缺點(diǎn),通過建立合理的動力切換控制策略,充分利用混合動力汽車兩動力源的優(yōu)勢。
1 仿真建模
以某款投放市場的混合動力汽車為原型,建立ADVISOR整車仿真模型,分析動力切換車速對混合動力汽車動力性、經(jīng)濟(jì)性及排放性的影響。
該混合動力汽車驅(qū)動電動機(jī)采用永磁直流電動機(jī),動力電池采用鎳氫電池,整車參數(shù)如下:加速度為9.81 m/s2;空氣體積質(zhì)量為1.2 kg/m3;汽車質(zhì)量為865 kg;汽車質(zhì)心高度為1.380 m;車寬為1.590 m;空氣阻力系數(shù)為0.38;迎風(fēng)面積為1.7 m2;軸距為2.365 m。
與美國城市道路循環(huán)工況相比,歐洲城市道路工況(ECE_EDUC)與我國城市道路工況更為接近,所以選取ECE_EDUC工況用于仿真分析。
1.1 門限值控制仿真建模
門限值控制策略能夠較為準(zhǔn)確地反映出不同動力切換車速下汽車的各項(xiàng)性能參數(shù)。選取發(fā)動機(jī)與電動機(jī)進(jìn)行動力切換時的車速分別為25,20,15,10 km/h,建立門限值控制仿真模型,通過仿真獲取在各動力切換車速下汽車動力性、經(jīng)濟(jì)性及排放性的各項(xiàng)參數(shù)。
1.2 模糊控制仿真建模
現(xiàn)今多數(shù)混合動力汽車都是以節(jié)氣門開度作為重要參數(shù)用來確定駕駛員對動力性的需求,然后輔以其他參數(shù),如蓄電池SOC值、冷卻液溫度等,綜合計(jì)算后確定出動力切換車速。精確門限值的模糊化能夠反映出2個門限值之間存在的過渡區(qū),用模糊參數(shù)取代精確參數(shù),并綜合考慮蓄電池的充放電效率,模糊控制比傳統(tǒng)的門限值控制更接近人的思維方式,能夠更好地描述控制規(guī)則。
通過蓄電池SOC值和油門踏板位置判斷動力切換車速,使用MATLAB模糊邏輯工具箱設(shè)計(jì)一個輸入變量為油門踏板開度(T)和蓄電池荷電狀態(tài)(SOC),輸出變量為動力切換車速(V)的模糊控制器,如圖1所示。
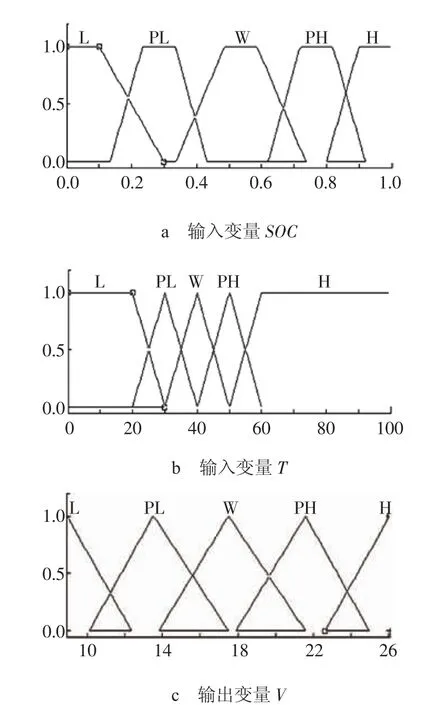
圖1 模糊控制器隸屬函數(shù)
SOC,T,V 的模糊集合均規(guī)定為{L,PL,W,PH,H}。其中:L表示低(小),PL表示偏低(偏小),W表示適中,PH表示偏高(偏大),H表示高(大)。
由相應(yīng)的隸屬函數(shù)和模糊規(guī)則,可生成模糊控制規(guī)則曲面,如圖2所示。將設(shè)計(jì)的模糊邏輯控制器嵌入汽車動力輸出控制模塊中。
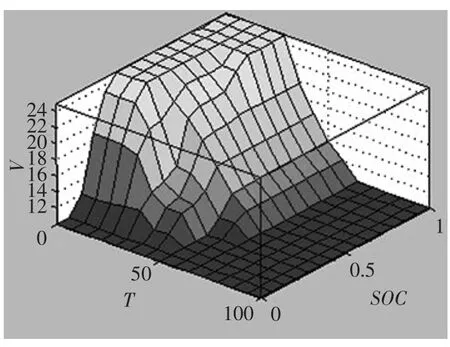
圖2 模糊規(guī)則曲面
2 仿真結(jié)果
圖3~圖6分別示出動力切換車速為25,20,15,10km/h時在ECE_EDUC工況下的仿真結(jié)果。
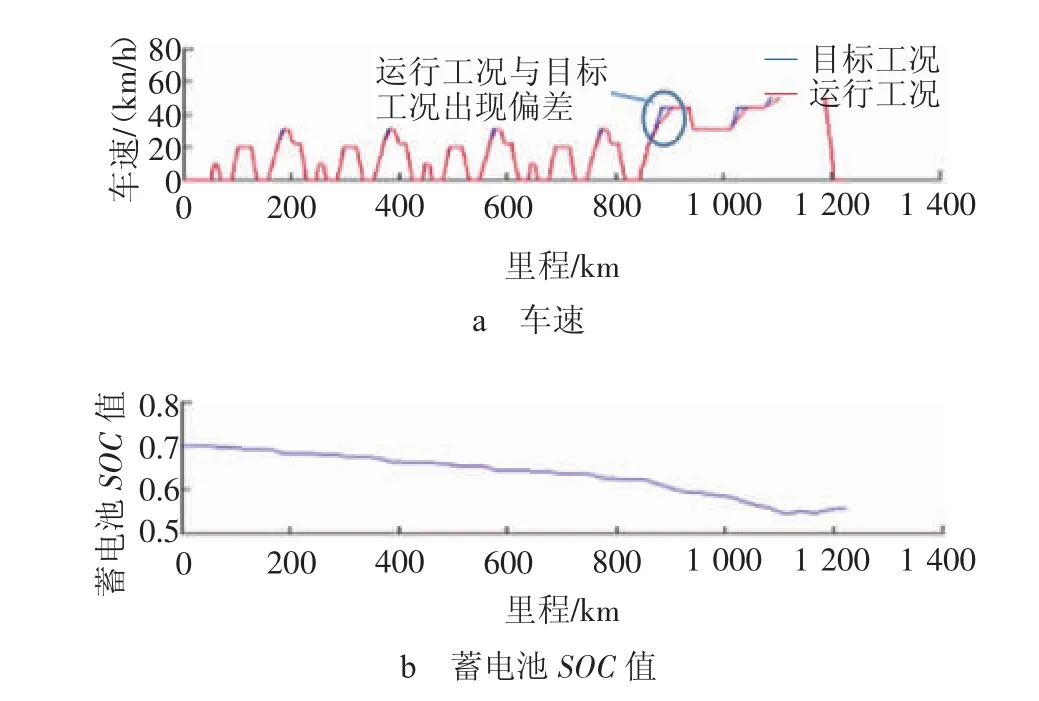
圖3 動力切換車速為25 km/h時在ECE_EDUC工況下的仿真結(jié)果
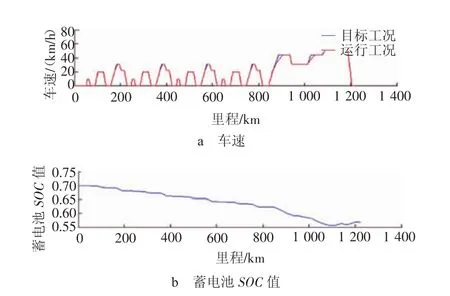
圖4 動力切換車速為20 km/h時在ECE_EDUC工況下的仿真結(jié)果
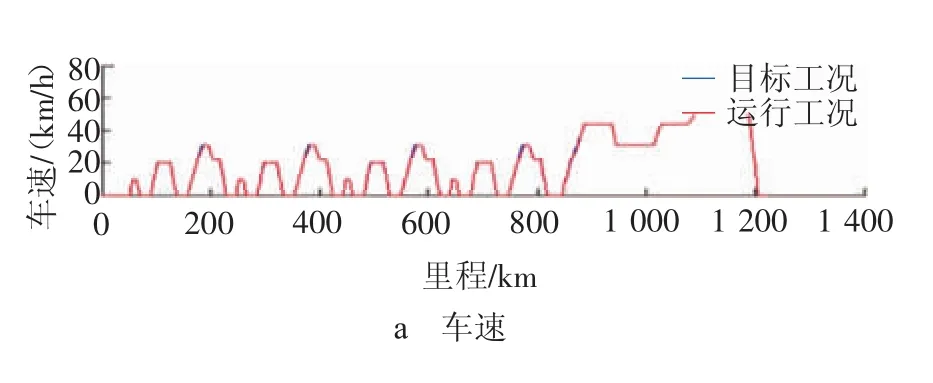

圖5 動力切換車速為15 km/h時在ECE_EDUC工況下的仿真結(jié)果
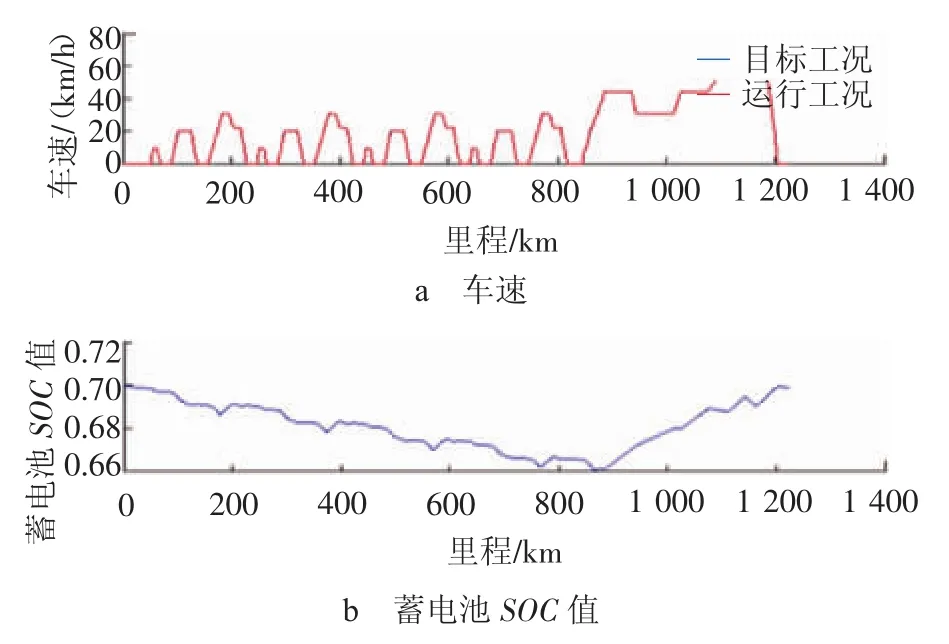
圖6 動力切換車速為10 km/h時在ECE_EDUC工況下的仿真結(jié)果
從圖3可以看出,動力切換車速為25 km/h時,蓄電池電量在一個循環(huán)工況的后期會接近保護(hù)極限(0.5)。如果蓄電池SOC值低于保護(hù)極限,發(fā)動機(jī)將會提前運(yùn)行以保護(hù)蓄電池不受損傷。從圖3和圖4可以看出,動力切換車速為25 km/h和20 km/h時,能夠滿足低動力需求工況,但在動力性要求較高的情況下,汽車運(yùn)行工況與目標(biāo)工況有一定的偏差,駕駛員會有汽車無力的感覺。從圖5和圖6可以看出,隨著動力切換車速的降低,汽車的動力性得到改善,動力切換車速降低至15 km/h時,汽車的運(yùn)行工況可以達(dá)到目標(biāo)工況的要求。隨著動力切換車速的降低,汽車動力性提高的同時,蓄電池的SOC值能夠更好地保持在高效區(qū)。
ECE_EDUC循環(huán)工況模糊控制仿真結(jié)果,如圖7所示。
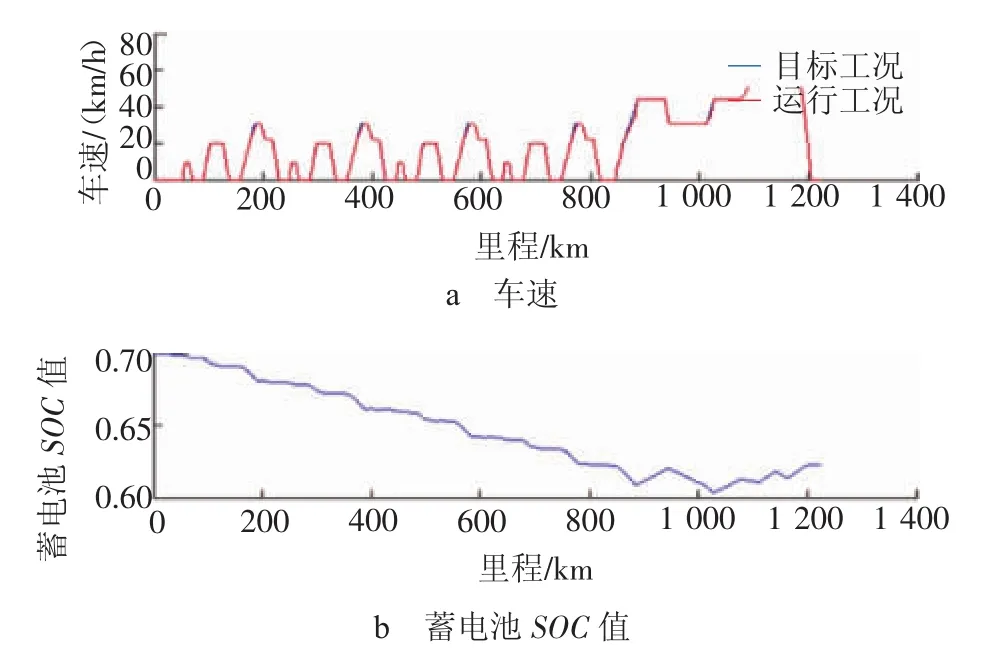
圖7 ECE_EDUC循環(huán)工況模糊控制仿真結(jié)果
從圖7可以看出,混合動力汽車在動力切換模糊邏輯控制策略下,汽車運(yùn)行工況能夠達(dá)到目標(biāo)工況的要求,且蓄電池SOC值能夠穩(wěn)定在高效區(qū)。各動力切換車速下汽車的經(jīng)濟(jì)性和排放性能,如表1所示。
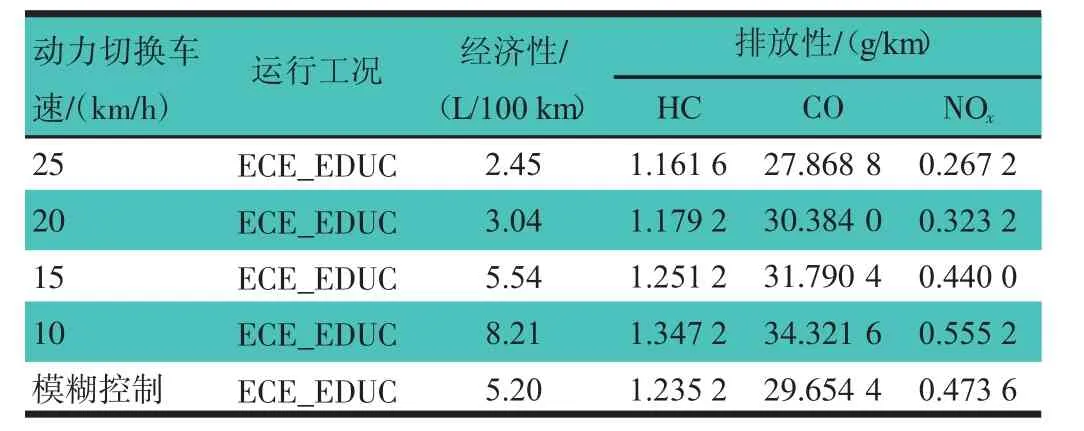
表1 各動力切換車速下汽車的燃油消耗量和排放量
3 仿真分析
仿真結(jié)果表明,在平均車速較低的循環(huán)工況下,電動機(jī)的工作比重較大時可提高汽車的經(jīng)濟(jì)性和排放性,而且動力能夠滿足駕駛需求,蓄電池SOC值能夠控制在合理的工作區(qū)間內(nèi);但在動力需求和加速要求較高時,如果發(fā)動機(jī)不能盡快地介入工作,汽車的動力性不能得到滿足。
從表1中可以看出,所選擇的汽車動力切換車速越高,汽車的經(jīng)濟(jì)性和排放性越好,所以在所選動力切換車速為25 km/h時,汽車的經(jīng)濟(jì)性和排放性最好。燃油消耗量和排放量隨著動力切換車速的降低而逐漸升高,當(dāng)動力切換車速降低到10 km/h時,汽車燃油消耗量為動力切換車速為25 km/h時的3.35倍。動力切換車速模糊邏輯控制下汽車的經(jīng)濟(jì)性和排放性介于動力切換車速在15~20 km/h時的狀態(tài),汽車燃油消耗量為動力切換車速為25 km/h時的2.12倍。
從仿真結(jié)果可以看出,動力切換車速高于20 km/h時,汽車運(yùn)行工況會與目標(biāo)工況出現(xiàn)偏差,而要滿足汽車的動力性,改善運(yùn)行工況,就需要降低動力切換車速;從表1可得,當(dāng)動力切換車速為15 km/h時,汽車燃油消耗量和排放量均高于動力切換車速模糊控制工況。
4 結(jié)論
從仿真結(jié)果可以看出,動力切換車速對混合動力汽車的經(jīng)濟(jì)性和排放性有較大影響;動力切換車速門限值控制策略在混合動力汽車經(jīng)濟(jì)性和排放性方面具有優(yōu)勢,動力切換車速模糊控制可以在滿足混合動力汽車動力需求的情況下,在20~15 km/h選取合適的動力切換車速,避免動力切換車速直接下降到15 km/h,能夠在滿足汽車動力性要求前提下提高汽車的經(jīng)濟(jì)性。當(dāng)汽車以經(jīng)濟(jì)性作為目標(biāo)時,可將25 km/h作為動力切換車速,在確保蓄電池SOC值能夠維持在穩(wěn)定區(qū)的前提下,讓混合動力汽車得到較好的經(jīng)濟(jì)性和排放性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
汽車工程師(2021年11期)2021-12-21 06:23:12
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
四川電力技術(shù)(2015年5期)2015-12-19 11:04:54
減速頂與調(diào)速技術(shù)(2015年4期)2015-03-16 03:39:41
決策探索(2014年21期)2014-11-25 12:29:50
河南科技(2014年11期)2014-02-27 14:09:55
