自動駕駛路徑跟蹤控制技術研究趨勢
2018-09-04 09:37:32黃海洋劉秋錚
汽車文摘 2018年9期
關鍵詞:模型
黃海洋 劉秋錚
(中國第一汽車集團有限公司 智能網聯開發院 智能駕駛研究所,長春 130000)
主題詞:路徑跟蹤 控制 自動駕駛 網聯汽車 編隊行駛
1 前言
近年來隨著傳感器、計算平臺、線控執行等技術的快速發展,自動駕駛車輛逐漸成為汽車行業的研究熱點。自動駕駛車輛軟件通常可分為三層:環境感知層、規劃決策層、執行控制層。路徑跟蹤控制技術作為執行控制層的核心內容,主要通過結合控制理論及車輛動力學特性,控制方向盤轉角使得車輛沿著規劃決策層所規劃的路徑行駛,其控制的精度、平滑程度等影響著自動駕駛車輛的行駛安全性、平順性等諸多性能,一直占據著車輛控制領域的研究熱點。
常規工況下的路徑跟蹤控制技術已有了較為成熟的應用,按照使用模型不同可分為基于幾何/運動學模型的方法和基于動力學模型的方法[1],其中基于幾何/運動學模型的方法,通常將車輛簡化為四輪機器人剛性結構,由于相對簡單計算量小,已有較多實車應用,如在DAPRA挑戰賽中首次使用的Stanly方法,名古屋大學的自動駕駛開源項目Autoware中使用的純跟蹤方法等。基于動力學模型的方法考慮車輛輪胎側偏等動力學特性,常結合線性二次型調節器、模型預測控制等最優控制理論,實現預瞄窗口內綜合控制偏差及控制調節量代價最小的目標,如百度阿波羅的自動駕駛開源項目中所使用的橫向控制器即為LQR和MPC。
此類路徑跟蹤控制技術已經能夠基本滿足常規自動駕駛車輛在常規工況(如附著良好、轉彎平緩)的使用需求,通過2018世界先進車輛控制大會的相關路徑跟蹤控制研究報告,我們不難發現車輛控制領域近年來的研究熱點,已經逐漸從常規簡單工況的路徑跟蹤向考慮更多影響因素、覆蓋場景更為全面的路徑跟蹤控制偏移,包括極限工況下的路徑跟蹤控制、網聯車輛協同路徑跟蹤控制、特種車輛的路徑跟蹤控制等,研究覆蓋更為全面,使得未來智能車輛的應用場景更為豐富。
2 極限工況下的路徑跟蹤控制
極限工況主要指輪胎力達到地面附著極限的工況。比較典型的研究方向為通過控制后輪先達到輪胎力飽和,使得車輛后軸側滑并穩定沿目標軌跡形式的漂移路徑跟蹤控制,這類研究旨在實現后軸側滑情況下穩定控制車輛沿既定軌跡行駛,提高未來自動駕駛車輛特殊極限工況下的安全性。
韓國首爾大學的Eunhyek Joa等人[2],通過將車輛總體橫擺角速度分解為自身轉動和繞瞬時旋轉中心的轉動,設計上層控制器計算目標前后軸的側向力,然后由下層控制器通過控制方向盤轉角實現前軸側向力,通過驅動力控制后軸滑移率,改變縱向力大小從而間接控制飽和的后軸側向力,實現漂移路徑跟蹤控制。
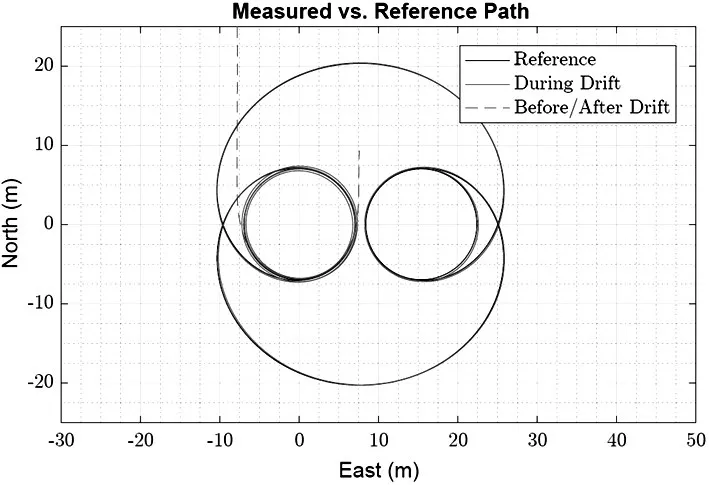
圖1 漂移目標路徑[3]
斯坦福大學的Jonathan等人[3]通過單軌車輛動力學模型構建了路徑跟蹤控制器,通過控制車輛速度矢量的旋轉在曲線坐標系下跟蹤橫向偏差,控制車輛相對于速度矢量的橫擺速度來調節車輛側偏,然后利用非線性逆模型及輪速閉環控制得出最終的方向盤轉角和驅動力矩控制量。實車試驗結果顯示在如圖1所示的軌跡,轉彎半徑約7 m和20 m,車速范圍在25-45 km/h,側偏角最大達到40°的情況下,其依然可達到良好的橫向偏差和側偏角跟蹤精度。
對于傳統車輛而言通常具有不足轉向特性,因此在極限狀況下多數情況為前軸先于后軸達到輪胎極限,由此通常會導致通過方向盤的轉向控制無法有效控制車輛跟隨期望路徑。針對這種極限情況,Victor等人[4]利用最優控制理論,通過在控制回路中的比例反饋實現極限輪胎力控制,具有較小的硬件計算資源消耗。
而Vincent等人[5]人提出了一種新型控制方法,其通過控制縱向速度來進行路徑跟蹤,而轉向控制用來使前輪在轉彎過程中接近最大側偏角,通過實驗對比發現,在路面附著估計不準確的情況下,該方法相對傳統通過轉向控制跟蹤路徑的方式,更能夠充分利用輪胎附著力并且有效跟蹤路徑。
Vivian等人[6]則針對模型預測控制(MPC)中采用的輪胎模型通常難以實現在全輪胎力范圍內一致的跟蹤性能問題,提出了一種新型的刷子輪胎模型線性化方法,可以有效應對從車輛靜止起步到極限轉彎的全部應用場景,基于MPC控制框架的Golf GTI實車試驗顯示,在車速過高過彎的工況下由于輪胎縱向力過大,導致可用的轉向橫向力減少的情況下,控制器通過輪胎模型可準確預測到側向力的飽和狀態,從而避免了飽和狀態下因過大的方向盤轉角控制量,反而使得車輛轉向不足特性更加嚴重的現象。
由此可見不管是利用后軸側滑,還是基于控制縱向速度減小車輛轉向不足的方法跟蹤目標路徑,均較為依賴對于輪胎力的建模與控制,是保證極限應用場景下自動駕駛安全性的基礎,此類研究對于自動駕駛技術從L4限定場景升級為L5全場景的自動駕駛具有重要的意義。
3 網聯車輛協同路徑跟蹤控制
網聯車輛協同控制的目標在于提升整體安全性、通行效率等優點,其研究內容主要集中在兩方面,針對編隊行駛車輛的路徑跟蹤控制和網聯自動駕駛車輛的協同換道控制。
高速公路的貨車自動編隊行駛可有效減少貨運司機人力成本,提升燃油經濟性,增加道路通行效率。隊列行駛的貨車由于后車的目標軌跡是由前車的實際行駛軌跡決定,如果在橫向控制中出現后車橫向超出前車行駛軌跡的情況,則很有可能引發后車陸續橫向更加發散的駛出車道,危及行駛安全性。Omar等人[7]針對這種穩定性問題進行了橫向控制研究,其在保證路徑跟蹤的總體控制目標的同時,將橫向隊列穩定性建模為控制目標,設計了H∞控制器,并通過仿真及實車實驗驗證了其變道工況下的橫向隊列穩定性。
多車輛同時變道是較為常見且容易發生事故的駕駛場景,而隨著車載網聯通信技術的發展,多車協同自動控制將有效提高駕駛安全性和通行效率。Ji?ang等人[8]設計了兩層控制器,上層控制器考慮車輛動力學特性及多車輛換道軌跡,提出“最大風險位置”的概念,利用博弈論建模計算調整本車的期望橫向、縱向加速度控制目標,下層控制器則根據當前車輛狀態及特性控制執行器實現期望加速度,通過與其他兩種模型的仿真控制結果對比,該策略能夠更有效的在較多車輛場景下實現協同換道控制,在多于3輛車同時換道的場景下完成了接近98%的換道成功率(其他兩種僅為8%和30%左右,見圖2),在保證安全的前提下提升通行效率。
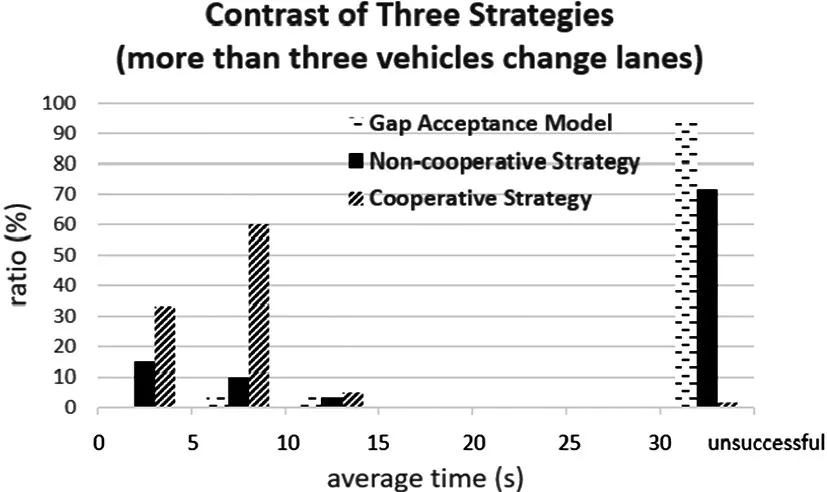
圖2 多車輛協同換道成功率[8]
4 特種車輛的路徑跟蹤控制
特種車輛通常具有多轉向軸、鉸鏈連接、履帶等結構特點,其自動駕駛路徑跟蹤控制減少了運營公司對于經驗豐富駕駛員的依賴,在危險品運輸等高危場景作業能夠減少事故傷害,具有良好的應用場景。
Wang等[9]針對如圖3所示的大型集裝箱運輸車輛的路徑跟蹤控制進行了研究,該類型車輛軸距較長,且裝載貨物質量不定導致車輛質心高度經常變化,車輛轉向時如果側向加速度過大有側傾危險,因此其首先采用遞歸最小二乘法估計車輛質量,結合考慮側傾特性的車輛三自由度模型及LQR最優控制方法,實現了有效穩定的自動路徑跟蹤控制。

圖3 智能集裝箱運輸車[9]
Kang等[10]針對履帶車輛的路徑跟蹤控制,創建了如圖4所示的運動學跟蹤模型,采用新型RBF神經網絡的控制方式,以橫向偏差和角度偏差作為網絡輸入,輸出左右兩側履帶旋轉目標角速度,以產生不同滑移率控制車輛轉向實現目標路徑的跟蹤,并證明了對地形具有良好的適應性,可應用于復雜的工作場景下。
Yutaka[11]等則對鉸鏈式半掛車輛(圖5)的自動泊車控制進行了研究,通過純跟蹤控制和鉸鏈角的反饋補償控制,實現了倒車過程中的路徑跟蹤,減少了泊車過程中對駕駛員高級駕駛技巧的依賴。
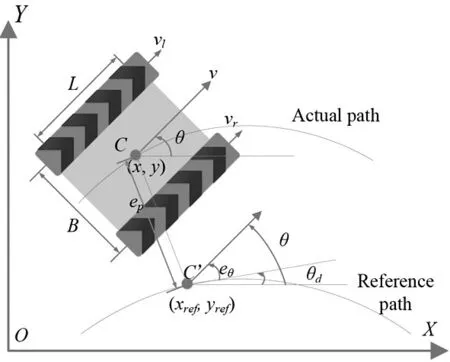
圖4 履帶車輛路徑跟蹤運動學模型[10]
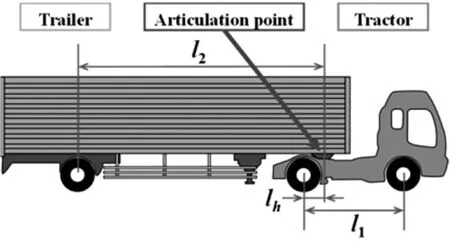
圖5 鉸鏈式半掛車輛[11]
由此可以看出,在對特種車輛進行路徑跟蹤控制時,需要在車輛建模及控制目標中考慮車輛結構及行駛特點,保證路徑跟蹤精度及車輛穩定性。
5 結束語
簡單場景下的自動駕駛路徑跟蹤控制技術已經發展成熟,當前研究熱點主要在于提升控制效果和覆蓋更多應用場景。
極限工況下的路徑跟蹤控制研究,促使自動駕駛覆蓋場景越來越豐富,促進著自動駕駛技術逐步向L5等級進步。
網聯技術使得自動駕駛車輛協同工作,可節約人力成本,提升整體安全性和道路通行效率。
特種車輛的自動駕駛可減少對于具有高級駕駛經驗駕駛員的依賴,同時可減小高危場景下的事故人身傷害。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19