V2X技術國際研究趨勢分析
2018-09-04 09:37:32王碩李璇高洪偉
汽車文摘 2018年9期
王碩 李璇 高洪偉
(中國第一汽車集團有限公司 智能網聯開發院,長春 130000)
主題詞:C-V2X 車路協同 5G 智能網聯汽車 DSRC
1 前言
V2X作為當前車聯網行業的技術熱點,不僅能夠使車載網絡從4G平滑過渡到5G時代,同時也在智能交通系統(ITS)中發揮了重要作用。V2X是自動駕駛[1]、車聯網領域的研究重點,得到了多方面的高度關注,如通信行業、交通管理部門、互聯網、保險金融行業等。國際上對V2X通信技術和應用的研究領先于國內,相關標準體系比較完善[2]。2015年前后,歐美已由政府和行業組織牽頭完成了大規模組網試驗和應用測試。國內相關研究起步較晚,需要參考借鑒國際相關領域的發展路徑和經驗。本文將對V2X所涉及的諸多主要技術領域的國際發展現狀進行梳理,并基于所收集到的資料,對發展趨勢進行分析。
2 V2X概述
2.1 V2X通信及標準
車用互聯通信技術(Vehicle to Everything,V2X)是將車輛與一切事物相連接的新一代信息通信技術,能夠實現車與車(Vehicle to Vehicle,V2V)、車與路側基礎設施(Vehicle to Infrastructure,V2I)、車與人(Vehicle to Pedestrian,V2P)、車與云平臺(Vehicle to Network/Cloud,V2N/V2C)等全方位的連接和信息交互。從通信標準體系來看,國際上存在兩個陣營,一個是以美國為首的DSRC(Dedicated Short Range Communications)標準陣營,另一個是由華為、高通、愛立信牽頭的C-V2X標準陣營。DSRC標準體系的底層通信技術源于WiFi標準體系(IEEE 802.11[3])。早在2010年7月,就已發布首版物理層和數據鏈路層標準IEEE 802.11p,各層標準較為完整。而C-V2X標準體系,則是基于蜂窩網絡通信技術構建而成。
2.2 5G與V2X
5G,即第五代移動通信技術,在各方面的指標都比4G有了大幅提升。IMT-2020(5G)推進組于2015年頒布的《5G概念白皮書》[4]中,對5G的主要技術場景、關鍵性能指標進行了定義,并明確了相關參數。
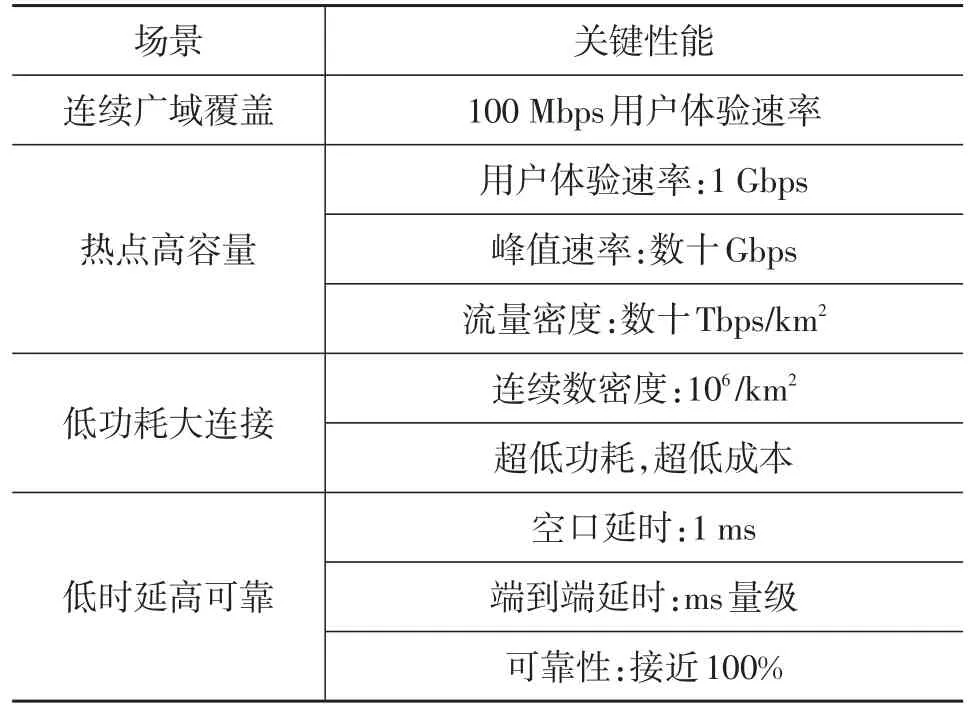
表1 5G關鍵性能指標
為了最終實現5G在核心網絡以及其他相關領域的推廣應用,需要多方配合完成專業的部署。5G相關的新技術、新協議由3GPP組織內成員進行研討,并統一定期發布。每一發布版本(Release)都會有新的協議、標準以及海量技術內容被鎖定。此外,也會對先前發布的版本進行修訂。
我們關注的C-V2X,正是5G給出的重要應用場景之一,相關標準也在隨著3GPP版本更新而不斷完善。在國內,華為、大唐等企業已經在各個試驗場,利用基于R14版本的LTE(Long Term Evolution)-V2X產品進行模擬實驗。
隨著R15版本的凍結[5],3GPP V2X也進入了第2階段(Phase2),即增強型車聯網(LTE-eV2X)階段。但這些都是基于LTE網絡的V2X,3GPP的V2X第3階段(Phase3)開始的NR V2X(如圖1所示)才是真正意義上基于5G的C-V2X。

圖1 3GPP的C-V2X標準研究進展[6]
從上圖可以看出,R14的LTE-V2X和R15的LTE-eV2X都只是最終的C-V2X的過渡階段。但很多企業仍然投入了大量資金和人力進行相應的開發工作。主要原因在于,5G網絡并不會完全取代LTE網絡,LTE和5G網絡將在很長一段時間內處于共存狀態。即使在5G全面鋪開后,LTE網絡依然會為用戶提供服務。因此,對于C-X2V應用,3GPP為各種場景均提供了有針對性的解決方案。應用場景按不同網絡覆蓋情況分三類:LTE和5G網絡覆蓋外區域、只有LTE網絡覆蓋的區域、LTE和5G同時覆蓋的區域。5G NR(New Radio)按不同網絡邊界情況分兩類:NRLTE切換和NR-NR切換。
2.3 相關技術
車輛定位技術已成為V2X應用必需的基礎技術,定位精度需求達到了亞米級別[7]。若想基于V2X應用數據融合輔助自動駕駛,則定位精度要求會上升為厘米級。另一方面,復雜環境下的車輛定位需求也隨著車輛智能化水平的發展而不斷提升。在隧道、地下停車場等室內場景的定位方法已成為技術發展的新方向。如何實現低成本、高可靠性的室內定位,將是面向自動駕駛應用的定位技術急需解決的問題。目前室內定位技術主要有基于圖像識別的輔助定位、基于無線通信的分布式定位等。
2.4 V2X應用
V2X應用可分為三類:駕駛安全類、交通效率類和信息娛樂類。V2X駕駛安全類應用的核心場景,是基于V2X技術向駕駛員進行車輛碰撞預警,提升駕駛員對駕駛環境、其他交通參與者的感知能力,從而減少交通事故的發生。典型的V2X駕駛安全類應用有十字路口碰撞預警、緊急電子剎車燈等,都能有效為駕駛員提供視野之外的危險信息。
V2X交通效率類應用,則需要與智慧交通基礎設施配合完成。路側智能設備負責收集道路信息,如交通燈狀態、限速信息、限行信息、事故占道信息、交通管制信息等,發給附近行駛車輛,駕駛員或智能導航根據實時信息規劃出行路線,動態控制車速,從而降低等待焦慮和出行時間,提高出行效率和舒適感。典型的V2X交通效率類應用有交通燈信息提示、車速引導、編隊行駛等。
V2X信息娛樂類應用,可基于通信制式分為兩類,基于云端服務的車聯網應用(Telematics)和基于近程通信的位置服務(Location Based Service-LBS)。車聯網應用讓車輛不再是孤立節點,而成為互聯網中的重要一環。相關業務也已得到整車廠、互聯網企業的高度重視。LBS主要指基于近程通信技術實現的對周邊小范圍的信息推送應用,如停車位引導、路側商務推廣等。
3 V2X國外研究進展
3.1 歐洲C-V2X研究進展
3.1.1 C-ITS平臺以及C-Roads平臺
歐洲的C-V2X應用研究主要由智能交通項目負責推進。合作式智能交通系統(C-ITS)允許道路使用者和交通管理者共享信息,并最終實現更加高效、自動化的交通規劃協調。
C-Roads平臺由歐洲國家和道路運營機構在2016年設立,主要用于協調車聯網部署和測試。歐盟各成員國制定和分享測試規范,并利用該平臺進行互操作測試驗證。通過這些聯合部署和測試活動,C-Roads平臺使得在歐盟范圍內構建跨境的C-ITS成為可能。
3.1.2 車聯網組織
2016年9月,歐洲數字經濟與社會專員和來自汽車、電信行業的代表,正式宣布成立歐洲汽車電信聯盟(EATA)。其主要目標是實現網聯化自動駕駛在歐洲區域的部署,并推進相關法律法規落地實施。
5G汽車協會(5GAA)是一個跨行業的組織,成立于2016年9月。該協會致力于開發、測試和推廣基于下一代通信技術的車聯網解決方案,加速相關產業的全球商業化和市場化進程[8]。5GAA認為,基于3GPP的蜂窩技術,能夠提供比IEEE 802.11p更優越的通信性能[9]。同時,該技術有較好的前/后向兼容特性。
3.1.3 歐洲車聯網通信標準
歐洲車聯網通信標準由歐洲電信標準協會(ET?SI)制定,主要內容包含地理位置路由協議,和支持在5.9 GHz頻段進行車車通信的接入層協議,即ITS-G5。
3.2 美國V2X研究進展
美國政府在2015年推出了ITS五年(2015-2019)規劃。主題為“改變社會移動方式”,技術目標是“實現網聯汽車應用”和“加快自動駕駛”。五年規劃定義了六個項目大類,包括加速部署、網聯汽車、自動駕駛、新興能力、互操作和企業數據。
在標準化進程方面,從本世紀初,美國就開展了車聯網標準的研究和制訂工作。美國采納了IEEE 1609定義的系統架構,在物理層和MAC層上應用了IEEE 802.11p協議。該協議利用802.11a的終端之間的直接通信機制,簡化了發送數據前的鑒權、關聯流程以及數據發送流程,讓車輛能夠直接向周邊車輛和行人廣播相關的安全信息。
為了推動車車通信技術發展和后續的立法決策,從2012年8月到2013年8月,美國交通部在密歇根州安娜堡東北部主導了基于車車、車路通信技術的“安全試點示范部署”項目。此項測試顯示,采用車車通訊技術能夠減少80%的非酒精類交通事故[10]。
在V2X的認證方面,美國目前已經有一套完備的認證體系,由US DoT與OmniAir、Danlaw、7Layers合作提出,用于支持試驗示范項目。目前國家在考慮將對V2X的認證從政府管理轉成產業行為(由OmniAir運行)。目前通信層的測試規范已經完備,后續OmniAir將對具體執行實驗室進行認證,并控制一致性證書以及認證logo的使用[11]。此外,OmniAir正在考慮與5GAA在上層通信認證方面進行合作(底層由GCF或者其他實體進行認證)。認證主要包含協議/消息一致性、性能需求和終端之間的互通性三大類內容。
3.3 日本V2X研究進展
日本政府很重視自動駕駛汽車和車聯網的發展,在政策、標準等方面為其提供了良好的平臺。日本政府于2016年發布了高速公路自動駕駛和無人駕駛的實施路線報告書,明確指出計劃2020年在部分地區實現自動駕駛功能。除了政府的支持,日本工業界對車聯網的發展也積極進行推進,在技術評估、測試等方面已經形成跨行業合作的態勢。日本智能交通系統信息交流論壇也在組織進行802.11p和LTE-V2X的技術性能評估。
2015年10月,日本首相在國際論壇的演講中提到,2020年東京將要實現車輛的自動駕駛。這標志著東京奧運會自動駕駛技術實用化方針的明確。為此,日本啟動了名為SIP(戰略性創新創造方案)的項目。其中,自動駕駛,即SIP-adus是它的核心之一。SIP-adus,又被稱為Innovation of Automated Driving for Uni?versal Services,是由日本政府牽頭推進的自動駕駛技術研發和應用項目。內容包括:自動駕駛系統所需的技術、動態地圖以及高精度地圖、網絡安全、人機交互等。在此之上,日本計劃建立基于實用化的ART(智能軌道快運系統)和ITS(智能交通系統)以及測試用的FOT(場地操作測試)系統。
3.4 韓國V2X研究進展
韓國在智能交通領域的終極發展目標,是在全國范圍內實現智能道路交通系統,即通過連接車、路和人,實現高度的自動化和交通資源利用最大化。目前的發展規劃,是在2040年之前建成連接路與一切交通功能實體(CoRE)的智能交通系統。韓國在建項目均計劃采用WAVE作為主要的車輛通信技術。隨著5G標準的推進和完善,韓國也在考慮利用5G蜂窩通信系統高速率和低時延的特點,進一步提高車輛通信的性能,即以LTE和5G蜂窩通信技術作為WAVE的補充。
4DSRC與C-V2X之爭
上述國家雖然都已在進行不同階段的V2X研究測試,但主要應用的都是基于DSRC標準開發的系統,使用C-V2X的系統或產品進行測試的項目還比較少。高通聯合福特、奧迪等公司在華盛頓特區舉行了C-V2X的互操作實驗[12]。
我國大唐電信公司也在這方面進行了前瞻性探索,聯合福特公司在京津高速公路上進行了車車通信的研究。測試場景中,雙方車輛分別以80 km/h、100 km/h、120 km/h的速度行駛,持續發送信息直到對方車輛無法接收到任何數據。圖2是大唐電信公司的分析結果。
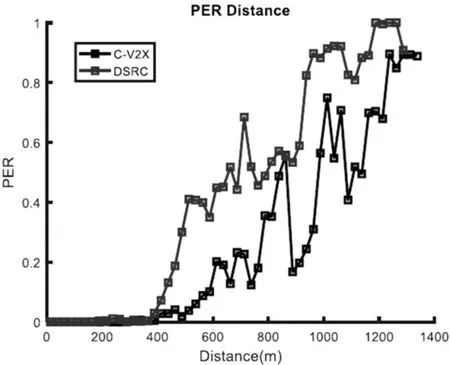
圖2 京津高速LTE-V2X與DSRC實驗結果對比[13]
從測試結果可以看出,采用C-V2X通信制式的車輛,全程的數據包誤差率(PER,Packet Error Rate)都低于采用DSRC制式通信的車輛。可知,基于第一階段(R14)的產品性能優于DSRC的通信性能。另外,DSRC技術的發展演進路線尚不明朗,應對未來出行需求的策略也不夠清晰。但基于LTE的C-V2X技術已由通信、汽車等多個行業的主流聯盟在積極推進發展,顯然,C-V2X技術具備了平滑演進到5G的條件,其行業投入、生態建設和市場應用可以預期[14]。
5 結束語
由以上分析可知,國際上各項V2X技術都尚未實現大規模商用。DSRC在歐美遲遲不能落地,一方面受制于DSRC技術的局限性,另一方面則是由V2X應用的特殊性決定的。車輛、道路和其他交通參與者都需要增加具有V2X通信功能的設備,才能實現互聯互通。這需要多方的聯合工作,科研院所、整車廠、芯片設備供應商、交通管理部門,以及普通用戶,都需要積極應對V2X推廣所帶來的產業變革。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
中華手工(2017年2期)2017-06-06 23:00:31
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32