基于iGMAS的BDS空間信號精度性能評估*
2018-09-03 09:53:42陳國通張曉旭邵士凱王小娜
通信技術 2018年8期
關鍵詞:用戶
張 璞,陳國通,張曉旭,邵士凱,郝 菁,王小娜
(1.河北科技大學,河北 石家莊 050018;2.衛星導航與裝備技術國家重點實驗室,河北 石家莊 050000;3.中國電子科技集團公司第五十四研究所,河北 石家莊 050000)
0 引 言
國際全球連續監測評估系統(international GNSS Monitoring & Assessment System,iGMAS)的基本功能是數據監測采集、傳輸、貯存、分析與信息發布,建設目的主要是為用戶提供安全可靠的全球衛星導航系統(Global Navigation Satellite System,GNSS)服務[1]。iGMAS對外地址為http∶//124.205.50.178,用戶可免費下載多系統高精度軌道、鐘差等產品[2]。作為全球四大衛星導航系統之一,北斗衛星導航系統(Bei Dou navigation satellite System,BDS)已經進入全球化建設階段,將面臨GPS、GLONASS、Galileo等諸多導航系統的競爭,而衛星導航系統的性能成為競爭的關鍵因素[3-5]。空間信號(Signal In Space,SIS)精度是評價衛星導航系統服務性能的關鍵指標,主要通過衛星的用戶測距誤差(User Range Error,URE)、用戶測速誤差(User Range Rate Error,URRE)和用戶加速度誤差(User Range Acceleration Error,URAE)表示[6]。以上誤差項僅包含預報軌道誤差、預報鐘差、群延遲誤差(Tgd)和導航系統時間等。這部分誤差主要來自地面部分(數據擬合誤差、預報模型誤差等)和空間部分(衛星受攝運動的不確定性等)[7]。
空間信號性能的好壞是影響導航定位精度的關鍵因素之一。導航系統中,URE是導航衛星位置與鐘差的實際值和利用預報導航星歷得到的預測差值,可在一定程度上呈現預報的導航星歷和鐘差精度,同時還決定著用戶的實時導航定位精度。目前,北斗所有衛星的URE均值為2.2 m(95%置信度):靜止軌道衛星(Geostationary Earth Orbit,GEO)的URE優于1.7 m(95%置信度);傾斜地球同步軌道衛星(Inclined Geosynchronous Satellite Orbit,IGSO)的URE優于3.8 m(95%置信度);中圓軌道衛星(Medium Earth Orbit,MEO)的URE優于2.2 m(95%置信度)。北斗所有衛星的URRE優于2.0 mm/s(95%置信度);URAE優于0.025 mm/s2(95%置信度)[8]。空間信號誤差對導航系統的建設和維護有重要作用。對于空間信號誤差的估計與分布特性,國內外已有學者進行了大量研究[9]。本文依托中國電子科技集團公司第五十四研究所的iGMAS監測評估中心,獲取了衛星的精密星歷文件與廣播星歷,評估和分析北斗在軌衛星空間信號精度。
1 鐘差數據來源
我國的iGMAS平臺所出的RINEX星歷文件使用北斗時間系統命名,包含23個接收站的數據。接收站名分別由我國國內8個站(chu1、xia1、gua1、bjf1、wuh1、lha1、sha1、kun1)和國外15個站(abja、brch、byns、canb、clgy、cnyr、dwin、hmns、icuk、kndy、lpgs、peth、rdjn、that、zhon) 構 成。星歷文件命名通用格式為ssssdddf.yyt,其中ssss為四字符測站名;ddd為第一個觀測值記錄的年內天;f為一天內的文件序號,其中天文件f=0,小時文件f=a,第一小時00h-01h;f=b,第二小時01h-02h;…f=x,第24小時23h-24h。yy為年的后兩位數字;t為文件類型:N為GPS導航信息文件,G為GLONASS導航信息文件,L為Galileo導航信息文件,R為BeiDou導航信息文件。
BeiDou導航文件的數據部分自左向右依次為:第一行,衛星系統(C),衛星號(PRN),歷元,Toc衛星鐘參考時(BDT),年(4位數),月,日,時,分,秒,SV clock bias(seconds),SV clock drift(sec/sec),SV clock drift rate(sec/sec2);第二行,IODE Issue of Data,Ephemeris,Crs(meters),Delta n(radians/sec),M0(radians);第三行,Cuc(radians),e Eccentricity,Cus(radians),sqrt(A)(sqrt(m)));第四行,Toe星歷時間(BDT),Cic(radians),OMEGA0(radians),Cis(radians);第五行,i0(radians),Crc(meters),omega(radians),OMEGA DOT(radians/sec);第六行,IDOT(radians/sec),保留,BDT Week#,保留;第七行,SV accuracy(meters),SatH1,TGD1 B1/B3(seconds),TGD2 B2/B3(seconds);第八行,信息的發射時間(BDT的周內秒),IODC時鐘數據齡期-保留,保留。數據格式如圖1所示。

圖1 廣播星歷歷元數據
精密星歷為全星座星歷文件,命名格式為此次使用的數據cgswwwwd.sp3。其中,cgs表示iGMAS的數據中心下載的精密星歷數據;wwww表示GPS周,d表示周幾,其中0表示周日,周一表示1,以此類推,周六表示為6。其中,時間部分在數據開始部分顯示,表示在這個時間點的星歷數據,4-31表示年、月、日、時、分、秒。下一行2-4表示系統與衛星號,5-18表示為X坐標,19-32表示為Y坐標,33-46表示為Z坐標,47-60表示鐘差信息,64-65表示X的精度參數,67-68表示Y的精度參數,70-71表示Z的精度參數,73-75表示鐘差精度參數。
2 空間信號精度評估方法
空間信號精度在一定程度上決定了導航定位授時的性能,主要包括用戶測距誤差、用戶測速誤差和用戶加速度誤差三部分。
2.1 URE計算公式
空間信號測距誤差SISRE是一個評估星歷精度的綜合指標,反映的是計算的衛星位置和鐘差與真值之差在視線方向上的綜合影響。對于GPS系統來說,因為軌道和鐘差是一起計算的,所以其軌道的徑向誤差和鐘差是負相關的[10]。但是,BDS廣播鐘差是采用星地雙向時間比對方法得到的,其徑向和鐘差的相關性很弱,所以北斗的SISRE計算公式與GPS略有不同[7,11]。北斗的SISURE計算公式為:

其中,S1表示R方向的影響因子,S2表示T方向與N方向的影響因子,c表示光速,T1表示鐘差誤差。
2.2 URRE計算公式
考慮到差分法計算時釆樣時間間隔應盡可能小,計算時需要以相同采樣間隔的精密鐘差和軌道作為參考值。例如,采用秒的數據計算,則需要觀測數據進行精密定軌,然后計算得到的精密鐘差和精密軌道,而不能用精密軌道和鐘差數據進行線性內插,原因是內插的精密鐘差不能體現原子鐘的抖動[12]。因此,本次實驗使用拉格朗日插值定理,計算得到每秒鐘的瞬時URE,然后計算得到URRE。
當Δt=ti+1-ti間隔很小,如Δt=1 s時,有:

由式(2)差分形式近似得到URRE:

其中,IURE表示瞬時URE。
2.3 URAE計算公式
使用差分法計算URAE時,采樣時間間隔應盡可能小,因為過大容易造成得到的精度偏高。所以,
本次實驗使用拉格朗日插值定理,差值間隔為1 s,然后計算得到URAE:

按定義,當Δt=ti+1-ti間隔很小,如Δt=1 s時,可用式(4)的差分形式近似得到URAE:

其中IURRE為瞬時用戶測速誤差,IURE為用戶測距誤差。
3 試驗與分析
北斗系統中,GEO包括C01、C02、C03、C04、C05,IGSO 包 括 C06、C07、C08、C09、C10、C13,MEO包括C11、C12、C14。此次實驗抽取了 GEO的 C04、IGSO的 C08和 MEO的 C14,采用2018年2月25日的星歷數據,通過URE、URRE、URAE三個方面評估空間信號精度。
3.1 用戶測距誤差
對用戶測距誤差的評估如圖2、圖3所示,其中GEO的用戶測距誤差為C04所示,IGSO的用戶測距誤差為C08所示,MEO的用戶測距誤差為C14所示。
國內數據在GEO中C04的用戶測距誤差90%收斂于±2 m;IGSO中C08的用戶測距誤差90%收斂于±1.5 m;MEO中C14的用戶測距誤差80%收斂于±1 m。其中,GEO一天的平均URE為1.768 m,IGSO一天的平均URE為1.157 m,MEO一天的平均URE為0.839 m。URE總體走勢方面,三個軌道面均在0附近振蕩,沒有出現單調增加或減小。國際數據與國內數據收斂范圍大致相同,其中GEO一天的平均URE為1.813 m,IGSO一天的平均URE為1.111 m,MEO一天的平均URE為0.811 m。而國內數據的精度偏差GEO為2.48%,IGSO為4.14%,MEO為3.45%。
3.2 用戶測速誤差
對用戶測速誤差的評估如圖4、圖5所示,其中GEO的用戶加速度誤差為C04所示,IGSO的用戶加速度誤差為C08所示,MEO的用戶加速度誤差為C14所示。
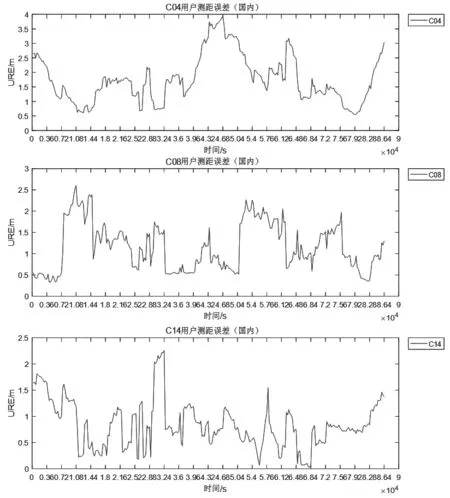
圖2 國內URE(用戶測距誤差)

圖3 國際URE(用戶測距誤差)
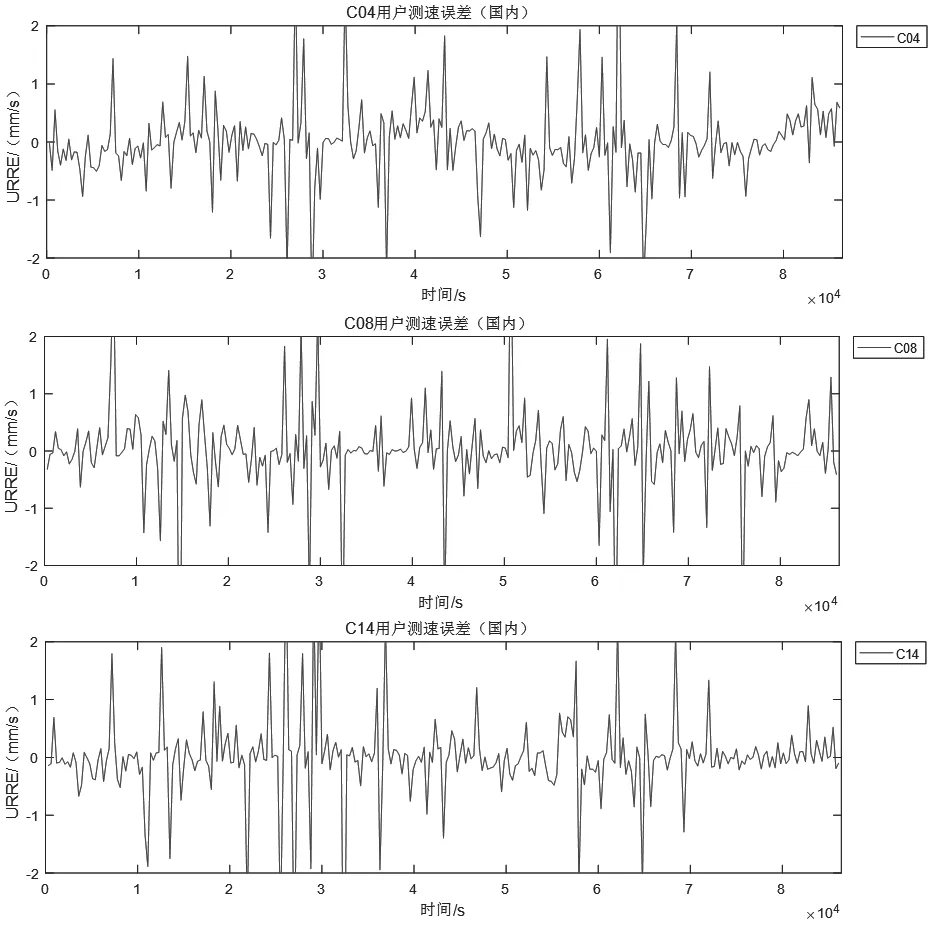
圖4 國內URRE(用戶測速誤差)
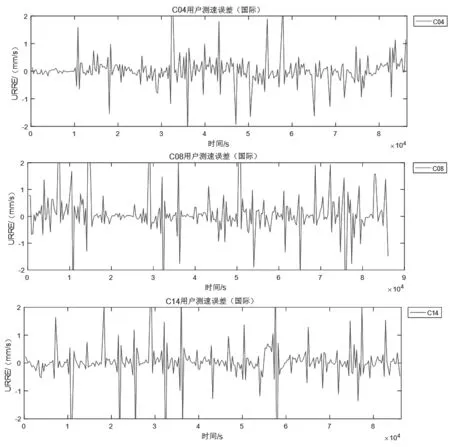
圖5 國際URRE(用戶測速誤差)
GEO中C04的用戶測速誤差90%收斂于±0.8 mm/s;IGSO中C08的用戶測速誤差90%收斂于±1.5 mm/s;MEO中C14的用戶測速誤差90%收斂于±1 mm/s;GEO一天的平均URRE為0.536 mm/s,IGSO一天的平均URRE為0.643 mm/s,MEO一天的平均URRE為0.565 mm/s。URRE的總體走勢方面,三個軌道面均在0附近振蕩,沒有出現單調增加或減小。國際數據與國內數據收斂范圍大致相同,其中GEO一天的平均URRE為0.534 mm/s,IGSO一天的平均URRE為0.585 mm/s,MEO一天的平均URRE為0.516 mm/s。而國內數據的精度偏差GEO為0.37%,IGSO為9.91%,MEO為9.50%。
3.3 用戶加速度誤差
對用戶加速度誤差的評估如圖6、圖7所示,其中GEO的用戶加速度誤差為C04所示,IGSO的用戶加速度誤差為C08所示,MEO的用戶加速度誤差為C14所示。
GEO中C04的用戶加速度誤差85%收斂于±0.4×10-3mm/s2;IGSO中C08的用戶加速度誤差90%收斂于±0.5×10-3mm/s2;MEO中C14的用戶加速度誤差80%收斂于±0.3×10-3mm/s2;GEO一天的平均URAE為0.236×10-3mm/s2,IGSO一天的平均URAE為0.243×10-3mm/s2,MEO一天的平均URAE為0.267×10-3mm/s2。URAE總體走勢方面,三個軌道面均在0附近振蕩,沒有出現單調增加或減小。國際數據與國內數據收斂范圍大致相同,其中GEO一天的平均URAE為0.228×10-3mm/s2,IGSO一天的平均URAE為0.261×10-3mm/s2,MEO一天的平均URAE為0.272×10-3mm/s2;而國內數據的精度偏差GEO為3.51%,IGSO為6.80%,MEO為1.84%。

圖6 國內URAE(用戶加速度誤差)

圖7 國際URAE(用戶加速度誤差)
4 結 語
(1)在用戶測距誤差中,URE(90%)收斂在2 m內。進行誤差橫向對比,MEO較好,IGSO次之,GEO較差。在用戶測速誤差中,URRE(90%)收斂于±1 mm/s。誤差橫向對比結果為:GEO較好,MEO次之,IGSO較差。在用戶加速度誤差中,URAE(90%)收斂于±0.4×10-3mm/s2內。誤差橫向對比結果為:GEO較好,IGSO次之,MEO較差。
(2)從用戶測距誤差、用戶測速誤差和用戶加速度誤差三方面分析,除用戶測距誤差的MEO、IGSO和GEO三個軌道面的誤差變化較大外,用戶測速誤差與用戶加速度誤差的三個軌道面的誤差十分接近。
(3)國內數據與國際數據由精度偏差可得,用戶測距誤差方面,GEO最好,MEO次之,IGSO較差,而所有的精度偏差均在4.20%內;用戶測速誤差方面,GEO最好,MEO次之,IGSO較差,而所有的精度偏差均在9.60%內;用戶加速度誤差方面,MEO最好,GEO次之,IGSO較差,而所有的精度偏差均在6.80%以內。綜合分析,GEO精度偏差最小,MEO次之,IGSO較差。
(4)建議我國iGMAS生成的產品,在空間信號方面對MEO與IGSO的星歷進行更深程度修正,縮小與國際數據的誤差精度,爭取早日走上國際舞臺。
總體分析,我國iGMAS所發布的星歷產品所到的數據,在用戶測距誤差、用戶測速誤差和用戶加速度誤差三方面均達到了國際標準,可作為評估空間信號精度的平臺。
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛星與網絡(2016年12期)2016-02-05 09:23:23
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
