船用減搖陀螺儀性能仿真分析
2018-08-30 08:50:08翟亞軍張懷宇
機電設備 2018年4期
關鍵詞:船舶
翟亞軍,張懷宇
(中遠海運重工有限公司,上海 210120)
0 引言
船舶減搖是提升船舶航行舒適性與安全性的重要途徑[1]。在隨機海面上航行的船舶的橫搖影響著船舶的適航性、安全性、船上設備精確性以及乘員的舒適性。因此,減小船舶的搖擺有著諸多現實意義。
船舶減搖一直是船舶行業研究的熱點[2]。目前常見的減搖方式有鰭減搖、舵減搖、減搖水艙和減搖陀螺儀,這些減搖方式各具特點。對鰭減搖和舵減搖的研究開始較早,也比較深入全面,這 2種方式目前在船舶減搖市場上占有很高的比例,但鰭減搖和舵減搖的減搖能力和船速有關,船速越慢,減搖效果越差,且一旦減搖裝置發生故障,會產生附加阻力,直接影響到船舶的快速性。減搖水艙占用的體積空間大,被動減搖水艙在波浪過大時甚至會加劇船舶的搖擺,主動減搖水艙則需要很大的動力系統,所以成本過高。
減搖陀螺儀作為一種減搖裝置,其性能隨著陸上的平衡小車、機器狗等新發明的平臺的產生,正在為研究人員所重視[3]。將其固定在船舶適當的位置上,利用高速轉動陀螺的進動作用產生減搖力矩,可以減輕船舶的橫搖。采用陀螺原理減輕船舶橫搖的構想很早就被提出,但由于技術和材料的限制,一直沒有發展、完善起來。近年來,隨著新技術、新材料的應用,陀螺減搖技術正在從陸上走向水上。隨著經濟生活的發展,游艇作為反映社會經濟水平的標準性產品,正在逐步普及。陀螺儀減搖裝置以其體積小、安裝簡便的特點,在提高游艇舒適性和平穩性方面具有得天獨厚的優勢[4]。本文建立減搖陀螺裝置三維模型和船舶橫搖非線性數學模型,在此基礎上利用Adams軟件進行動力學仿真,在給定的特定船型上驗證了陀螺減搖裝置在不同海況下的減搖性能,分析了陀螺減搖能力和船舶排水量大小的關系。
1 減搖陀螺的減搖性能模擬
對減搖陀螺減搖性能的模擬包含了船舶、波浪及減搖陀螺克服波浪的激勵的反向力矩間三者的耦合作用。因此,建立三者間的力矩平衡模型是進行減搖陀螺減搖性能模擬研究的關鍵。
1.1 波浪作用下船舶與減搖陀螺耦合橫搖力矩平衡非線性數學模型
船舶實際運行中,在波浪作用下的阻尼力矩和恢復力矩呈非線性關系,以Mathiue[x]方程為基礎,建立船舶單自由度非線性橫搖運動方程。

橫搖阻尼力矩取HADARRA等提出的線性阻尼加立方阻尼的形式。

為使計算簡便,將回復力矩近似為一個五次多項式。

式中:K1、K3、K5為恢復力矩系數。
將隨機波浪激勵表示為波傾角的函數,干擾力矩為

式中:D為船舶的排水量;h為橫穩性高;α(t)為波傾角,它是時間的函數,由隨機波浪疊加而成,可由波傾角頻譜定義。

式中:ω為諧波頻率;εn為在(0,2)內均勻分布的隨機相位角;N為所選取諧波個數;遭遇頻率ωe=ω-kucosx;k為波數;u為船舶航行速度;sσ(ω)為波傾角頻譜函數,可由海浪譜函數sξ(ω)獲得。

式中:g是重力加速度。將式(2)~(4)帶入式(1),可得到隨機波浪作用下的船舶非線性橫搖運動方程。


忽略陀螺外框架的質量,不考慮船舶在其他自由度上的運動對陀螺減搖裝置的影響,轉子為軸對稱剛體,其相對Oz軸的轉動慣量為I,相對于Ox和Oy軸的轉動慣量為J,轉子轉速恒定為oω,β為轉子相對于Oy軸的進動角。

圖1 系統坐標系
根據剛體定點運動的歐拉方程,陀螺減搖裝置相對于轉動坐標系Oxyz的運動方程為
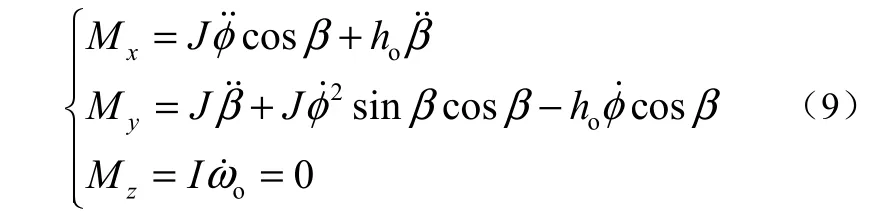
式中:Mx、My、Mz分別為合外力局矢量在 Oxyz坐標系上的分量;ho為陀螺的動量距常數, ho=Iωo。顯然,若以Oy軸為輸入軸,輸入力矩為My,使陀螺產生進動,則在Ox軸將會有力矩Mx輸出。將以上運動方程中輸出力矩Mx投影到平動坐標系中,由于高速旋轉陀螺的穩定性,角速度˙、和ωo極小,忽略其二階微量,則以上動力學方程簡化為

由此可見,若在Oχγz輸入力矩My,則陀螺裝置會分別在 Oξ、O?兩個軸向輸出力矩 Mξ和M?,而 Mξ可用來抑制波浪激勵產生的船舶橫搖。陀螺減橫搖能力大小由陀螺轉子動量距和角速度的乘積來決定,也就是說,陀螺減搖裝置的減搖能力由轉子相對轉軸的質量分布、轉動角速度以及進動角來決定。
1.2 SolidWorks建模仿真
SolidWorks是一款功能強大的三維制圖軟件。以陀螺儀減搖原理為理論基礎,在分別設計出各個零部件之后,用SolidWorks的裝配功能把零部件組裝起來,形成裝配體。為了便于后面的仿真分析,圖2顯示的是簡易版的減搖裝置裝配體。選擇氣彈簧作為模擬海浪作用在船體的裝置,普通彈簧受力不穩定性,而氣彈簧速度相對緩慢、動態力變化不大(一般在 1∶1.2以內)、容易控制,而且具有幾乎線性的弾性曲線。氣彈簧能更加準確地實現海浪作用在船舶上的真實效果。為了便于后續的仿真分析,在不影響仿真結果的基礎上,本機構對于一些造成冗余約束的機構進行簡化,并且去除一部分影響仿真的因素,比如:刪除了軸承和電機,用旋轉副代替;刪除了螺栓螺帽,用固定副代替。

圖2 減搖裝置裝配體
為了研究減搖裝置在橫浪中對船舶橫搖運動的抑制作用,并考慮到本文所設計的船用陀螺儀的適用性,采用1.8 m海浪2號無人艇為仿真試驗船舶,如圖3所示。橫搖參數根據模型試驗獲得,該船的基本參數如表1所示。

圖3 海狼2號無人艇

表1 船舶結構基本參數
2 Admas仿真與分析
在SolidWorks三維建模的基礎上,把裝配體保存為parasolid(*.x_t)格式,導入到Adams中,如圖4所示。Adams軟件使用交互圖形環境和零件庫、約束庫、力庫,創建完全參數化的機械系統幾何模型,其求解器采用多剛體系統動力學理論中的拉格朗日方程方法,建立系統動力學方程,對虛擬機械系統進行靜力學、運動學和動力學分析,輸出位移、速度、加速度和反作用力曲線。

圖4 Adams仿真模型
海浪模型可分為二維長峰波隨機海浪模型和三維不規則短峰波隨機海浪模型[5]。二維長峰波隨機海浪也被稱為二元不規則波或長峰波,是指海浪向著一個確定的方向傳播,其波峰和波谷相互平行并與波浪前進方向垂直。三維不規則短峰波隨機海浪是指由風激勵產生的波浪,由于風方向的隨機性,其波浪不僅會向一個方向傳播,同時也會向其他方向傳播,從而在海面上形成一個個大小不等的小丘,也稱為三元不規則波或者短峰波。本文采用二元不規則波仿真研究船舶在隨機海浪中的動力學特性。可以近似地把長風波波形看做正弦函數圖像形式。用正弦函數A*sin(Bd*time)來模擬海浪周期和大小,其中A指的是海浪的振幅,B指的是海浪在x軸上單位時間內所運動距離,即周期。海上波浪實際上是不規則的,它們由各種不同波長、波高和陡度的波組成。經觀測統計表明[6]:1/10的波的波高是平均波高的 2倍,其被稱為最大波高(hw/10);1/3的波的波高是平均波高的1.6倍,其被稱為三一平均波高或有義波高(hw/3)。人們在海上目測的波高很接近有義波高。為了使仿真更加便捷、更具針對性,文章所使用的波高為有義波高。不同海浪等級所對應的有義波高如表2所示。

表2 不同海浪等級所對應的義波高
為了更加準確方便地模擬海浪,本文取用有義波高來模擬不同級別的海浪,如圖5所示。分別在陀螺減搖系統轉子轉速為0 r/min和8 000 r/min的情況下,對不同等級的海浪進行Adams動力學仿真,設置仿真時間為10 s,仿真步數為5 000,如圖6所示。

圖5 有義波高

圖6 陀螺轉子轉速和仿真步數
一級海浪下,陀螺減搖系統轉子轉速分別為0 r/min和8 000 r/min時的仿真結果如圖7所示。

圖7 一級海浪仿真結果
二級波浪下,陀螺減搖系統轉子轉速分別為0 r/min和8 000 r/min時的仿真結果如圖8所示。

圖8 二級海浪仿真結果
三級波浪下,陀螺減搖系統轉子轉速分別為0 r/min和8 000 r/min時的仿真結果如圖9所示。

圖9 三級海浪仿真結果
四級波浪下,陀螺減搖系統轉子轉速分別為0 r/min和8 000 r/min的仿真結果如圖10所示。

圖10 四級海浪仿真結果
五級波浪下,陀螺減搖系統轉子轉速分別為0 r/min和8 000 r/min時的仿真結果如圖11所示。

圖11 五級海浪仿真結果
根據仿真結果,可以看出:當海浪等級小于三級時,本文所設計的船用陀螺儀有很好的減橫搖功能,在一級波浪的時候,減搖性能甚至可以達到90%左右。但由圖10可以看出:當波浪等級為四級時,陀螺減搖裝置的減搖效果已經很弱了,但是可以減小船舶的橫搖頻率。由圖11可以看出:當波浪大于五級時,減搖裝置不僅不能減搖,還會增加橫搖。此處需要注意一個問題,即一般船舶抗風浪能力在一定程度上和船舶的噸位相關,船舶噸位越大,相應的抗風浪等級越強。本文所設計陀螺儀搭配的船舶噸位較小,其抗風浪能力相對較小。而對于一般非軍用船舶來說,即使有一定抗風浪能力,公司船東也不會允許船舶在大風浪天氣下航行,因為大風浪會造成各種不可抗拒因素,一般遇到四級或者五級海浪,小型船舶就會選擇進港避風。
船用陀螺儀抗橫搖能力和轉子相對于轉軸的位置有關,即是和轉動慣量有關。本試驗中的陀螺轉子質量較小,因此減搖能力有限,當換用較大轉子后,減搖能力會增強。同時,可以減少影響轉子轉動速度的因素,提高轉子的轉動速度,比如可以使陀螺轉子在一個真空密閉的環境中轉動,這樣可以使轉子的轉速提高兩倍以上,重量減輕三分之一,用電量僅為過去的二分之一。
根據仿真結果,可以發現本試驗裝置的兩個明顯弱點:1)打開減搖裝置的瞬間,會給船舶造成一個類似于快速抖動的影響;2)當波浪等級過大時,陀螺減搖裝置不但不會減搖,甚至還會增強船舶橫搖。對于這種現象,可以為減搖系統增加一個控制器,以此來控制陀螺減搖裝置進動,使其在受外力矩作用時,也能實現主動控制進動,從而減少搖晃。
3 結論
本文所設計的減搖裝置可以在一定程度上減輕船舶橫搖。在理論分析和實際運用的基礎上,可以得出陀螺減搖器容量選擇范圍:總動量距(kNms)=船舶排水量(t)×選擇系數,選擇系數應在0.20~0.40之間,根據船舶的其他技術參數及航行海況進行確定。由此結論可以看出:如果陀螺轉子擁有更加大的轉速和質量,并加入主動進動控制系統,那么可以明顯增加陀螺系統的減搖能力。此外,可以在同一艘船舶上使用多個陀螺減搖系統,以獲得很好的效果。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
