自適應無人艇測量系統架構設計與驗證
2018-08-30 08:50:06麥若綿賈登科艾澤宇
機電設備 2018年4期
麥若綿,賈登科,艾澤宇
(中交第四航務工程勘察設計院有限公司,廣州 510230)
0 引言
隨著我國對自然資源保護力度的加強,加強對水庫、水壩、河流等水資源的監測與調查非常必要。為獲得江、湖水域資源參數數據,特別是水下地形的數據,水面測量船是重要的工具。在特殊水域,受天氣、人力、船型和安全等因素的影響,傳統的、依托母船和人工參與的水下地形測量方式存在一定的難度和風險。隨著信息技術和人工智能技術的發展,基于自主導航、自動控制和遠程通信等技術的無人艇測量系統成為未來發展的趨勢[1-2]。
當前,在軍事需求的牽引下,國內外學者對無人艇平臺設計及其應用開展了大量的研究,有力地推進了無人艇系統的開發與應用。NAEEM等[3]設計了集成GPS、測深儀的無人船用于航道水深的測量。楊瑞慶等[4]結合環境識別技術和無線網絡技術,構建了包括信息采集、信息處理、信息傳輸等功能的無人艇測量系統架構。金久才等[5]利用無線電遙控將岸基(母船)控制單元和測深船控制單元進行延時補償處理,實現了無人船測量系統數據傳輸的實時性。彭琳等[6]分析了船體姿態變化對測量誤差的影響,通過改進旋轉角參數來實現測量誤差修正的方法。陳立波等[7]通過集成衛星定位、智能導航控制和實時通訊等技術,搭建了一個智能化無人水下測量系統,并實現網絡化覆蓋。黃國良等[8]設計了一套基于無人船的內河航道信息測量系統,以滿足復雜水域的水文測量要求。無人艇測量系統所涉及的技術比較廣泛,張浩昱等[9]提出了一種模糊PID控制算法以實現在線自適應優化的要求,并利用水池試驗結果對所提出算法的有效性進行了驗證。馮月衛等[10]開展了無人艇模型的航行姿態、穩性等參數的自主控制實驗,并對無人艇的總體布局進行了優化。耿以才等[11]利用安全目標追蹤算法,開展了雙回路追蹤及自動避障策略研究,提出了無人船實時航行的最短路徑算法。葛增魯[12]使用常規PID和模糊PID算法設計運動控制器,將其應用于無人艇上進行實船驗證。
在本文中,針對淺水水域水下地形測量的需求,開發出一套便攜型水面無人測量系統,將新船型技術、智能導航技術與測量檢測技術融合在智能探測無人艇上,通過對河流水文等數據的采集、處理、存儲及遠程傳輸,以實現對水庫、湖泊、堤壩、航道水深情況的監測。
1 系統功能與架構
在無人艇測量系統中,為實現預定目標,需要確定該系統的基本功能和實現該功能的基本架構。
1.1 系統功能
為開展淺水域中的水下地形測量、水下地貌繪制、水面環境探測等作業,實現測量系統的自主航行、自動避障等功能,滿足河川、湖泊、海岸、港灣、水庫等水域對水上測量系統的要求,研制開發一款便攜、可靠、經濟的無人測量艇系統非常必要。無人艇以新型多體船型為基礎載體,通過搭載測深儀器、攝像儀器、DGPS等模塊,結合智能導航系統和岸基(或母船)系統,實現人工/自動操控、自主航行等功能。采用無線傳輸方式,對無人艇進行遙控操作和控制、實現實時數據傳輸和監控、在岸基設施接收和存儲采集的數據資料。無人測量艇可用于監測水庫、湖泊、堤壩、航道的暢通情況,測量和監測河流水文特點,快速獲取高精度地理信息。
1.2 系統架構
水面無人測量系統由船體系統、動力系統、探測系統、船載數據存儲系統、船載控制系統、信息傳輸系統和岸基控制系統等子系統組成,整個系統功能示意圖如圖1所示。

圖1 無人艇系統
在無人艇系統中,各子系統功能描述如下:船體為雙體,兼顧了快速性、穩性以及設備安裝對小艇的需求,艇體材料采用具有強度高、耐腐蝕、耐撞性好的金屬框架+玻璃鋼結構;動力系統中,使用鋰電池作為動力電池,使用雙槳雙舵動力推進形式,同時電池還為慣導、DGPS移動站、PC104電源模塊等供電;探測系統包括水深探測儀、DGPS設備和攝像系統,探測儀使用高精度ISA500數字水下高度計實現對水底或水下目標的回聲測距,并以模擬和數字形式對外輸出,DGPS設備提供遠程基站多星RTK基線,攝像系統可提供圖像用于避碰;船載控制系統選用PC104系列工控機,它是整個無人船的控制核心,支持 Linux、Windows等主流操作系統;信息傳輸系統通過大功率遠程數傳電臺實現遠程桌面操控,執行圖像傳輸和信號傳輸功能;岸基控制系統可遠程遙控無人艇的運動,它與無人船子系統中的無線通訊系統組成了一套點對點的無線通訊系統,可實時接收并存儲探測數據。
2 系統軟件設計
在無人艇系統中,使用 Labview語言編寫控制軟件,開發具有人機結合良好的監控界面。同時,采用執行效率高、穩定性強的C語言編寫執行機構控制程序。
1)執行機構控制程序
使用C語言編寫STM32驅動程序,STM32核心板使用RS232協議與下位機通信,執行機構包括螺旋槳和垂直舵。其中,STM32核心板的PWM通道產生脈寬調制信號、GPIO通道產生脈沖信號,發送給電機驅動器,實現對螺旋槳的運動控制;STM32產生頻率為50 Hz的PWM數字信號驅動舵機,實現對垂直舵的控制。設計的通信協議如圖2所示。

圖2 上位機、下位機通信協議
當上位機發送控制指令、下位機接收和發送數據時,按照圖2所示通信協議對控制指令進行封裝,上、下位機根據收到的指令進行解碼,實現相應的功能。
2)數據采集軟件設計
無人艇航行過程中,需實時記錄一些設備功能數據,如:執行機構動作數據,包括電機轉速指令數據、舵角指令數據、電機轉速實時數據、舵角實時數據;航行狀態數據,包括無人艇三軸角度、角速度、加速度,無人艇航速、絕對經緯度坐標值;目標的距離、航向、航速、大小;探測數據。在設計軟件時,各功能數據使用同一頻率實時保存,并以txt格式文件的形式實時保存至下位機硬盤中,供后期處理使用。
3)操控控制軟件設計
無人艇操控系統具有的功能包括航行姿態顯示、經緯度顯示、航速顯示和電機轉速顯示等,系統包含指令按鈕、數據保存模塊和手動操作模塊等。
無人艇搭載慣性導航單元,通過使用 Labview編寫的數據采集程序,可以實時讀取無人艇的三軸角度、三軸角速度、三軸加速度數據。在無人艇操控界面中,使用 Labview三維場景顯示控件,將其與慣性導航單元的數據鏈接起來,即可實時地以三維動態形式顯示出無人艇的航行姿態。
無人艇具備自主航行功能,但在某些情況下需要操作人員手動操作。通過在 Labview的鍵盤空間編寫操控指令,操控者可以通過鍵盤按鈕對無人艇進行遠程操作。
3 關鍵技術
自適應無人艇除了具有一般無人艇的基本功能外,還能實現人工/自動操控和自主航行功能。為實現上述功能,所涉及的關鍵技術包括如下幾部分。
3.1 自主航行技術
在給定航路約束點的情況下,自適應無人艇能基于電子海圖自主規劃路徑,并自主控制航向和航速。同時,無人測量船(艇)在作業水域探測時若受到風浪等影響,不可避免地要偏離原來給定的航向。精確的航向控制是解決航跡跟蹤、自主航行和自動避碰等功能的前提。本文研制的測量船具有自動駕駛功能,其智能運動控制系統總體目標為:操作員通過基站設定航行任務,相關執行器根據航線信息,差分GPS或北斗位置,慣導的姿態、航向、方位等位置信息,實時計算出航線跟蹤所需要的航向角和航速,并解算出所需的舵角,從而沿著計劃測線控制。
3.2 自主避碰技術
在淺水區域中,存在大量的水下或水面障礙物,其會對無人測量船(艇)以及艇底測量設備構成危險。因此,需要尋求水面和水下障礙物立體實時感知和立體組合避碰技術,從機動能力、障礙探測、避障決策等多方面展開研究,保障無人測量船(艇)的安全。無人艇的一個重要功能是智能規避靜止障礙物和移動障礙物,并能夠在避開障礙物之后繼續完成預定任務,即在保證自身“安全”的前提下,完成指定的任務。智能規避是無人艇實現自主航行的基本前提,而智能探測和感知又是實現規避的基礎。無人艇的智能感知技術指的是無人艇能夠通過自身傳感器和探測設備,對水面及水下的靜止或移動目標進行探測,以確定無人艇的大小、方位、航速、航向等信息的技術。
船舶智能避碰系統屬于控制系統內的一個閉環系統,包括傳感器檢測與反饋子系統、船舶運動控制子系統和船舶動態避碰子系統。在智能感知技術的基礎上,研究和建立了面向自主避碰的無人艇運動模型,并利用DCPA和TCPA概念建立了船舶避碰的決策數學模型,利用最優控制原理進行無人艇自主避碰的實時解算和控制,避碰功能架構如圖3所示。

圖3 綜合避碰仿真圖
4 試驗驗證
為驗證無人艇測量系統架構設計和軟件的合理性,論證對關鍵技術的解決情況,建造一艘便攜型無人艇并進行相關功能的試驗驗證。
4.1 無人艇建造
對于船體系統,為兼顧無人艇這類小型船對快速性和穩性的要求,開發出高速穿浪雙體船,該船型保留了小水線面雙體船的低阻、高耐波性、高穩定性及常規雙體船甲板面積寬敞的優點,克服了小水線面雙體船的片體無儲備浮力和要求復雜的航態控制系統及傳動系統等缺點。為保證無人艇測量系統的便攜性,其總體尺寸和質量比較小,無人艇的外形尺寸為900 mm×400 mm×200 mm(長×寬×高),總質量約12 kg,可裝在旅行箱內進行攜帶。操控電腦為筆記本電腦,保證了攜帶的方便性。圖4為無人艇外形和內部圖。

圖4 無人船圖
4.2 功能驗證
為檢驗無人艇測量系統的技術融合效果,對無人艇的設備及系統的功能進行驗證。功能驗證主要內容是檢測探測儀器設備在標定、靜態和動態3種方式下的測深精度。探測設備標定主要是在岸上對水深探測儀、DGPS系統、攝像系統等設備的精度進行確認,獲得精確的設備參數;靜態方式是無人艇在靜止水面上進行測量,獲得測深板的深度作為標準水深值,然后橫向搖晃測量船,模擬遙控測量船測量時的搖晃狀態,記錄換能器在單擺安裝方式下測得的水深值,并和已知的標準水深值比較;動態方式是通過岸端服務器設定多個目標點和1個home點,無人航道測量船在自動導航模式下,按照預設定依次通過多個目標點,并最終返回到home點。圖5為深度圖,圖6為無人艇DGPS系統定位圖。

圖5 水深度圖
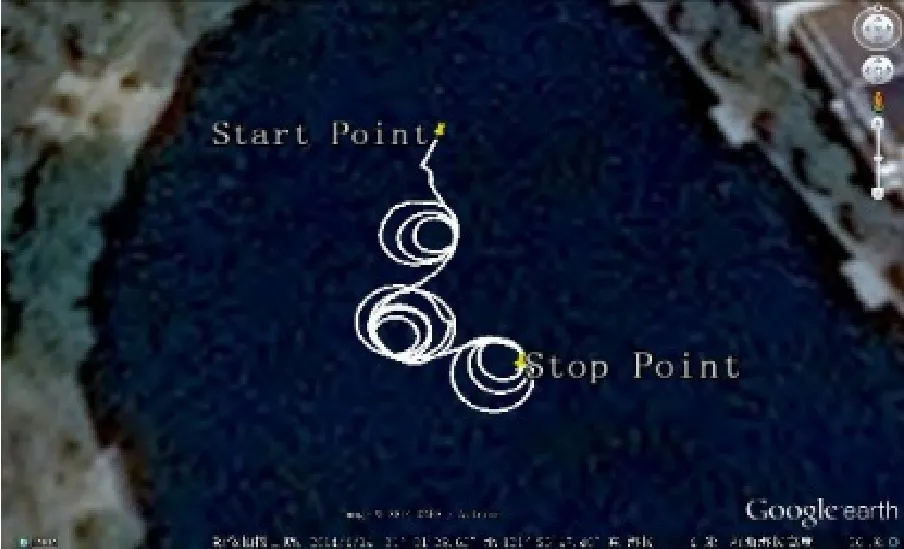
圖6 無人艇DGPS系統定位圖
5 結論
針對特殊水域水下地形測量的需求,開發了一套具有自適應性的便攜型無人艇測量系統。本文從無人艇測量系統的功能需求出發,探索了該系統的基本架構和相關關鍵技術解決路徑。最后,通過對無人艇的試驗,驗證了該無人艇測量系統在特殊水域實施水域地形探測的效果和應用前景。研究成果可為后續技術改進和商業實施提供技術支撐。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
