汽車主動制動控制過程分析
2018-08-29 07:20:52陳海淼
汽車實用技術 2018年15期
關鍵詞:系統
陳海淼
(浙江正飛科技有限公司,浙江 紹興 312366)
前言
汽車主動制動控制系統能夠在制動期間監視和控制車輪旋轉方向上的滑移程度,防止由于制動過大而造成車輪抱死(尤其在濕滑及冰雪路面上),從而充分利用地面和車輪的摩擦力進行制動并保持車輛的橫向穩定性(有效的防止車輛側滑甩尾)和可操作性。
毫無疑問,主動制動控制系統的設計主要取決于制動系統的特性以及執行器的性能。而裝備傳統液壓執行器的輪式車輛的標準ABS主要基于規則的控制邏輯。因此,不得不涉及液壓驅動制動(HAB)系統的開/關(ON/OFF)動態特性問題。
1 技術參數及其控制原理
液壓驅動制動系統一般由電子控制單元控制二位三通高速開關電磁閥來實現制動輪缸壓力的增壓、保壓和減壓三種狀態控制。制動系統如圖1所示:

圖1 液壓制動系統
在常規制動系統中,駕駛人通過制動踏板施加制動壓力并通過加壓電磁閥傳遞到液壓系統,加壓電磁閥與制動輪缸相通,減壓電磁閥用于降低制動壓力并與低壓儲液器連接。制動力作用于輪缸,將其傳遞到制動塊并最終到達制動盤。增壓制動時,加壓電磁閥打開,減壓電磁閥關閉;保壓制動時,兩個電磁閥都關閉;減壓制動時,加壓電磁閥關閉,減壓電磁閥打開。液壓驅動控制執行器制動力矩的動態特性可描述為:

式中:Tb為制動力矩,N·m ;t為時間,s;U為控制變量,,N· m/s;K為執行器速率極限值,kN/s,K決定了執行器性能,制動壓力的增大或降低受到K的限制。其中U=-K對應減壓控制特性,u=0對應保壓控制特性,U=K對應增壓控制特性。

圖2 電子控制單元有限狀態機描述
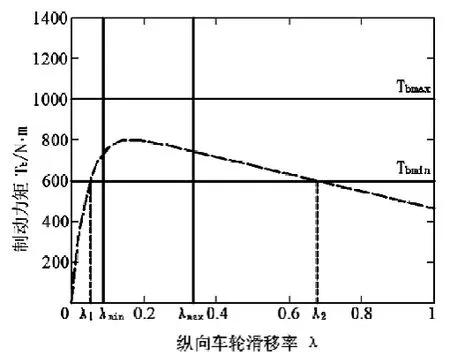
圖3 平面狀態圖(λ,Tb)
電子控制單元采用混合控制的有限狀態機(FSM)控制方法,使車輪滑移率控制在縱向附著系數最大的理想滑移率附近的狹小范圍內,保證車輛的制動穩定性和轉向的可操縱性,有效提高制動安全性能。圖2表示出了電子控制單元有限狀態機由4個離散狀態q={0,1,2,3}組成,每一個狀態有一個相關的控制作用,即U={-K,0,k} 。圖3表示縱向滑移率λ與制動力矩Tb平面狀態圖,狀態圖中的方框區域表示制動系統切換面,當系統軌跡到達切換面時,這些離散狀態之間就發生轉換,并且切換流形根據當前控制單元狀態q變化而變化。此外,在正常工作條件下,電子控制單元在激活狀態下進入q=0狀態,這是由于當制動操作開始時,電子控制單元通常在車輪滑移率λ達到預先設定的門限值(低于λmin)時被激活。轉換狀態如下:
1)制動操作開始時,有限狀態機(FSM)處于離散狀態q=0,然后系統隨著U=k動態特性變化,即增壓控制,制動力矩Tb增加,直到制動力矩達到系統設定的控制門限值Tbmax,系統發生第一次切換,切換極限點為Tb=Tbmax;2)系統切換到離散狀態q=1,這時U=0,即保壓控制,從這一初始條件開始并在這一狀態下演變,λ逐漸增加,電子控制單元時時計算比較與設定的滑移率門限值,直到λ≥λmax,系統發生第二次切換,切換極限點為λ≥λmax;3)系統切換到離散狀態q=2,此時U=-K,即減壓控制,制動壓力下降,制動力矩由Tb=Tbmax-kt可知,Tb隨時間增加而減小,直至Tb≤Tbmin,第三次切換極限點為Tb≤Tbmin;4)系統切換到離散狀態q=3,即U=0,保壓控制,滑移率λ變小至系統設定的門限值極限點λmin,系統再次切換。當離散狀態q=0重新進入時,重復循環上述過程。注意:系統設定的門限值的極限點是根據不同車型在各種車速和路面條件下,通過反復試驗獲得的數據,并基于對控制變量的估計精度的可信度,對數據做進一步調整后獲得的。當然,若汽車上裝有輪胎—路面附著力監測系統,電子控制單元就根據當前道路條件及時調整門限值 Tbmin和 Tbmax,令控制邏輯達到最佳,汽車制動也能達到最期望的性能水平。
2 控制過程
從離散狀態q轉換過程可以看出,電子控制單元需要縱向車輪滑移率λ的測量以及制動力矩Tb的測量。縱向車輪滑移率可以對輪速傳感器(電磁式輪速傳感器或數字式輪速傳感器,主要元件為帶齒的或帶槽的轉動部分和能夠檢測到每轉過一個齒或槽就能輸出一個脈沖的固定傳感器)測試結果進行正確處理,得到輪速wr的估計值,車輪縱向滑移率有:

式中:v為車速,m/s;w為車輪角速度,rad/s;r為輪胎半徑,m。
制動力矩可以通過測量制動壓力p并由如下方程得到:

式中:rd為制動盤半徑,m;γ為制動塊摩擦系數;A為制動活塞面積,m2。
需要注意的是,由于制動壓力p不是總能得到測量值,制動力矩的門限值往往被車輪減速度的門限值取代。電子控制單元控制邏輯轉化為車輪減速帶、加速度和車輪滑移率。車輪減速度有:

式中:g為重力加速度,m/s2。
圖4表示高附著系數路面上ABS電子控制單元控制過程,制動控制過程如下:
在制動的最初階段,隨著制動壓力p增大,車輪減速帶也隨之增大,當減速度低于系統設定的門限值(-a)時,二位三通高速開關電磁閥進入保壓階段,以使車輪充分地制動。此時,電子控制單元計算并判斷車輪的
滑移率是否超過系統設定的滑移率門限值,若低于滑移率門限值λmax,則電磁閥轉到減壓狀態,由于制動壓力下降,車輪減速度也會變小,直至(-a)信號出現。在后續的保壓狀態下,由于車輪慣性作用,車輪加速度增加直至超過門限值(+a)(該門限值用于判斷低附著系數路面),隨后制動壓力一直保持不變。只有在加速度超過較高的門限值(+A)(表明是高附著系數路面),制動壓力再次增加,當車輪加速度再次回到(+A)時,電磁閥進入保壓狀態,車輪加速度逐漸回落到(+a)值,由于此時在滑移率附著系數曲線峰值附近,制動壓力進入緩慢升壓階段,以便保持在滑移率穩定區域內,直到車輪加速度再一次低于門限值(-a),系統進入下一個制動壓力循環。由于第一個循環已經識別路面狀況,下一個循環電磁閥立即進入減壓方式。在制動過程中,如果車輪轉動慣性大,附著系數低,同時制動壓力增加緩慢(小心地制動,如在冰滑路面上制動),則車輪對減速度門限值還沒有反應過來就可能抱死。在這種情況下,車輪滑轉也用于制動控制。
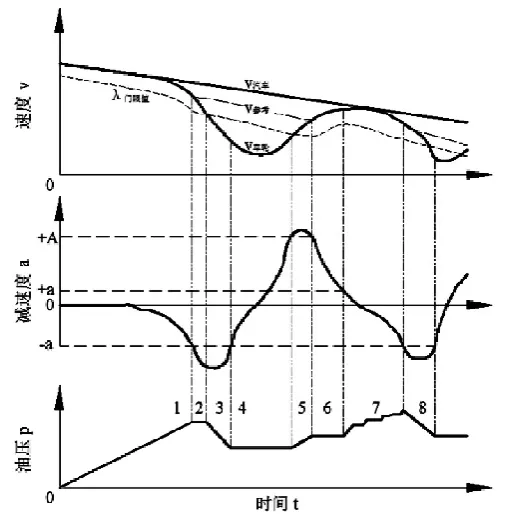
圖4 高附著系數路面上ABS控制過程
3 結束語
綜上分析可知,電子控制單元以車輪減速度、加速度以及滑移率作為控制參數,采用邏輯門限值控制方式,能適應路面附著系數變化的能力,實施不同的制動控制,將車輪滑移率保持在可以接受的范圍內,避免車輪抱死,同時縮短制動距離。
最后,需要特別指出的是:圖2所示的ABS電子控制單元是當前液壓ABS實際應用的切換邏輯的核心,即使它只提供了對實際應用的整套規則的簡單的描述。當然,這樣的控制邏輯在實際應用中必須處理除了正常功能以外的所有可能的功能,這將導致需要的邏輯規則大量增加。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
