混合動力汽車動力傳動系統參數匹配研究
2018-08-29 07:20:42荀博深耿龍偉楊驍趙振秀
汽車實用技術 2018年15期
關鍵詞:效率
荀博深,耿龍偉,楊驍,趙振秀
(1.鹽城工學院汽車學院,江蘇 鹽城 224051;2.英國華威大學制造工程學院,英格蘭 CV47AL)
前言
近年來,可持續能源存儲和管理技術得到迅速發展。因此,越來越多的電池驅動的電動汽車(BEV)或由燃料電池驅動的汽車產生。電動汽車是由牽引馬達和電池驅動的,因此沒有任何排放。在環保方面,電動汽車是最好的選擇。然而,受限于技術發展,電動汽車行駛里程非常有限。在這種情況下,可采用大電池組和內燃機驅動以增加行駛里程。
1 設計依據
本設計方案以英國市場銷量較大的電動版大眾up!汽車,本設計方案的工況選擇需滿足以下幾個要求:①3級油耗測試循環工況的的二氧化碳排放量為60g/km;②百公里加速時間16s;③高速公路巡航時速105km/h;④滿載時可在1/3斜坡上啟動;⑤ 最小離地間隙大于 200mm。傳動系中車輪相關的假定參數依據設置如下:

表1 車輪相關的假定設計參數依據
2 車輪所需動力
2.1 車輪所需功率
汽車需在 16s內從靜止加速到 100km/h,因此,車輪所需功率:

假設100km/h的瞬時功率作為電機的峰值功率。Pa為加速度功率,,其變化率隨時間變化而變化。假設瞬時加速度和速度分別為0.67m/S2和27.8 m/s,則可推導出 16s所需的功率。將對應的值代入公式 1可得:Pp=P車輪=44.16kw。
2.2 車輪所需扭矩
將上述所得功率、瞬時速度和輪胎半徑代入公式(2)可得:

3 布置方案設計
3.1 傳動系統的布置結構選擇
以大眾電動版 Up!車型為參考對象,其布置結構為串聯混動。在串聯混動系統中,電源由大容量發動機和電池組成。串聯混合動力的顯著特點是發動機不需與傳動系統相耦合。在這種情況下,發動機的主要功能是充電,以延長電池的續航時間[1]。如圖1所示,發動機和電池輸出的機械動力通過傳動系統驅動車輪。
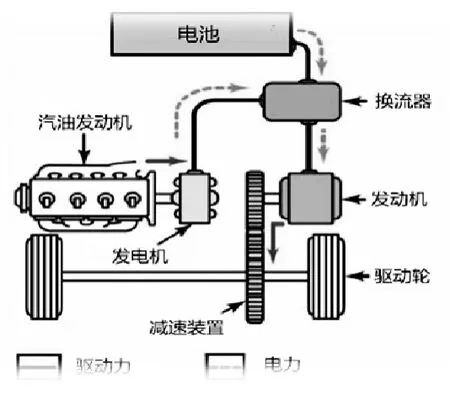
圖1 串聯混合結構
該串并聯混合結構均可實現怠速停止、再生制動、蓄電池充電和靜止[2]。串聯結構的主要優勢在于相對簡單的結構。因此,研究和開發的成本較低;在串聯混合結構中,機械結構較少,因此質量更輕;同時,發動機尺寸也大大縮小,更好的節省了布置空間。
3.2 傳動系統參數設計
3.2.1 電機
電機所需要的功率取決于驅動設計方案。從最差的情況來看,所有的電力由牽引電機提供。機械動力由電機帶動驅動齒輪,再傳遞給車輪。通常沒有能量轉換的傳遞效果較好,傳輸的效率η可達90%。其關系可描述如下:

因此,可得P峰值≈50kw。
額定功率應滿足兩種情況下的功率要求,即巡航速度105km/h穩定行駛工況,2.5s內加速至40km行駛工況[3]。車輪所需的功率可由公式(4)取代:

取代后可得:

因此,可得P巡航≈16kw。同理可得P巡航≈28kw。電機所需較大功率為電機額定功率。因此,電機的額定功率為28kw。
為了推導電機的峰值扭矩,引入公式(6)如下:

3.2.2 發動機和發電機組
發動機的設計是為了滿足串聯結構中穩定狀態所需的功率。即巡航速度105km/h穩定行駛工況的功率等于發動機的額定功率,這里不考慮多重轉換產生的能量損耗。假設從發動機到發電機的能量轉換效率(ηe-g)為 95%;從發電機到電能的能量轉換效率(ηg-pe)為70%;從電能到電機的能量轉換效率(ηpe-m)為80%,機械傳動效率(ηm-w)為90%。將效率值代入公式(7)如下:

因此,可得P額定≈27kw。
3.2.3 蓄電池
忽略能源管理控制策略不計,整個循環由低相位、中相位、高相位和額外高相位組成。(Up!車型屬于 3b級是由于其處于工作狀態的功率質量之比不足 75kg,比率大于 34W/kg,最高速度≥ 120km/h[5])。最差情況下的電動汽車更易于計算和推導。

圖2 EV模式在整個3b能量循環工況曲線圖
如圖2為整個WLTC在3b級驅動循環的牽引、制動和總能量,且都來源于蓄電池。由圖可知,在任何時刻,車輪所需總能量應該等于相應的牽引能量減去相應的制動能量,描述如下:
但實際上再生制動效率不可能達到 100%。在制動過程中,受滑動摩擦影響,車輪表面的動能轉換成了熱能,因此,假設車輪的再生制動效率ηw=40%[6]。假設再生能量從傳動系流向電機的效率 ηw-m=90%。在制動過程中電機也將機械能轉化為電能,假設效率 ηm-pe=80%。在此之后,電能經逆變器轉化成電化學能儲存到蓄電池中,假定效率 ηpe-b=90%。最后,假設電池的放電效率ηb=95%。綜上所述,蓄電池中儲存的可再生制動能量:

相反,蓄電池中釋放出來的牽引能量會在蓄電池向車輪的流動過程中損失。假設蓄電池到車輪的轉換效率在兩個方向上相同,可描述如下:

代入公式(7)可得E總=4.89kwh。
由于整個驅動循環被假定為在EV模式下驅動,電池容量可以通過乘以完成的WLTC 3b循環的數量來計算。電動版Up!可以跑到電池耗盡從3b循環中需求能量。使用公式(11)進行計算:

在整個驅動周期的范圍由電控單元控制,這里取 Range周期=23.266km,電動汽車 Up!在 WLTC循環中指定行駛范圍為120km,該值小于電動汽車e-Up! (NEDC)[5]。代入公式(11)可得:E蓄電池=25.22kmh。綜上所述,本文選擇ANR26650型號蓄電池,并提出整個電池的布置由10個串聯模塊組成,每個模塊由10個并聯組組成,并聯布置32節電池,其參數如下表2所示。
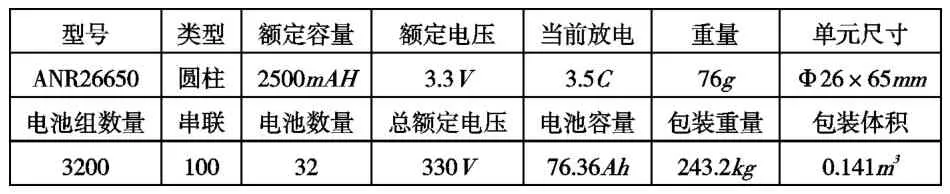
表2 蓄電池及其布置的技術參數規格
4 驅動模式設計
圖3所示為Up!中管理控制系統。根據自動控制策略,確定驅動模式。電控系統在短時間內循環算法,根據輸入的不同來確定最合適的驅動模式。根據該算法產生三種不同的驅動模式,以確定最佳的能源使用及管理情況,并將SOC保持在20%到80%之間[5]。
4.1 強制充電模式
汽車啟動后,單片機開始檢查電池組的充電狀態。為了使鋰離子電池組的生命周期最大化,防止SOC值下降,與此同時保持燃料油位為 0%,在此情況下對蓄電池進行強制充電。此外,在這種模式下,需限制牽引電機和ICE的運行以達到能耗最低的目的。
4.2 增程模式
如果當 SOC低于 10%且燃料罐不是空的,單片機就會觸發,此時,啟動牽引電機和 ICE給蓄電池充電。若 SOC<40%,則傳感器將檢查油箱以確定是否開啟ICE進行充電。如果燃料油位高于 0%,則由單片機選擇混動模式自動啟動ICE給蓄電池充電。若油箱是空的,盡管SOC<40%,汽車仍將保持電動模式。一旦 SOC>40%,駕駛員可選擇關閉 ICE以增程模式來進行移動充電。
4.3 電動模式
當檢測到SOC>80%時,由于放電速率變快,ICE將會自動關閉。
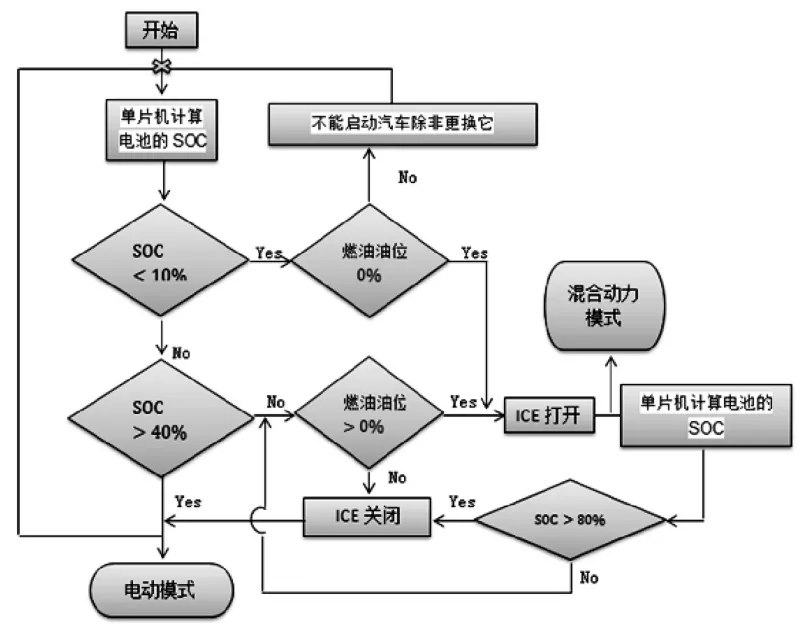
圖3 驅動模式管理控制系統
5 制動系統(能量回收)
再生制動系統是混合動力汽車廣泛應用的制動系統。在制動過程中,牽引電機可以反向旋轉以恢復動能干擾扭矩。與此同時,牽引電機也可以像發電機一樣將能量轉化為儲存在儲能系統中的電能[5]。為了實現必要的穩態制動以確定制動力如何分布在前軸和后軸上。通常情況下,混合動力汽車有兩種制動控制策略[5]:串聯制動和平行制動。其中,串聯制動系統可以給駕駛員更好的制動感覺以及更好的回收能量。但是串聯制動系統的控制系統相對較為復雜,研發投入較大。而平行制動從再生制動中回收動能較少,更多的是依靠較簡單的控制策略來確保穩定性。考慮到成本與穩定性,本文選擇并行制動系統。
6 結論
本設計方案針對純電動車的不足之處,參考混動版典范汽車大眾 Up!車型。討論、設計并研究了混動汽車設計過程中所需的動力計算過程、動力傳動系統的結構布置、結構參數設計,其中包括電機、發動機和發電機以及蓄電池的結構參數設計及計算過程,研究了三種驅動模式,分別是強制充電模式、增程模式、電動模式,最后選擇了較為適合混動汽車的再生制動系統,為今后能在混合動力汽車設計方面提供一定的參考。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32
