基于藍牙4.0的人體上肢運動姿態采集及識別系統研究
2018-08-25 08:14:18韋俊
電子設計工程 2018年16期
韋俊
(西安交通大學城市學院,陜西西安710000)
長期以往,人們對于人體自身生命的現象研究并沒有停止,其中的研究重點就是人體自身運動研究分析和解釋。人體運動任曦主要指的是利用某種方式實現人體運動姿態的檢測及追蹤,從而得到人體運動過程中的多種運動參數,以此全面描述并且解釋人體運動。在人們的對此方面進行深入研究的過程中,其也逐漸成為了一門全新的學科,就是人體運動生物力學[1]。此門學科主要是利用人體運動解剖的生理特點,創建人體某部位的模型,使用多種測試手段對人體在運動過程中的速度、位移、加速度、力等運動方式進行測量及分析,以此得到和人體相關的信息。運動姿態識別指的是對指定區域中字條變化的識別,對物體運動過程中的幅度急性檢測,一般利用儀器儀表定量化數值實現描述[2]。文中設計的基于藍牙4.0的人體運動姿態收集和識別系統是以加速度傳感器為基礎進行設計,其功耗較低,并且尺寸較小,價格成本理想,能夠利用主控及收集芯片實現運動人員上肢信息的收集,利用對加速度傳感器收集進行數據分析,識別運動人員上肢姿態的動作。
1 人體運動姿態的識別研究
在模式識別領域不斷發展的過程中,傳感器也在不斷的朝著微型化及智能化的方向發展,以加速度傳感器為基礎的人體運動姿態時識別研究不斷重視,部分研究人員實現圖像識別及語言識別等技術進行改進,使其以加速度為基礎[3],圖1為人體運動姿態識別的過程。

圖1 人體運動姿態識別的過程
通過圖1可以看出來,人體運動姿態的識別過程為:首先利用數據收集的得到相關行為加速度的信號,之后對于這些信號進行去燥、平滑及校正等數據預處理的操作,以此得到更加優質的數據,為特征的提取打下良好的基礎[4]。對于通過預處理加速度的數據實現物理特征和意義的分析,之后實現特征的提取,最后根據識別算法和實際需求收集全部或者某部分特點創建特征向量,最后將分類器作為姿態識別的主要部分,利用相應的訓練過程中對人體狀態識別有效分類模型進行創建[5]。
2 運動姿態收集及識別系統的設計
2.1 運動姿態收集和識別系統
運動姿態收集和識別系統主要包括多個模塊構成,比如姿態檢測單元、數據收集單元、數據處理單元、通信模塊等,此系統已經是以現代加速度傳感器及慣性測量技術為基礎,實現人體運動姿態信息收集和計算,從而得出輸出結果。利用運動姿態檢測系統實現人體運動姿態數據的收集之后處理,并且將其到計算機中傳輸,從而實現之后的處理和姿態運動[6]。圖2為運動姿態收集和識別系統的基本構成。
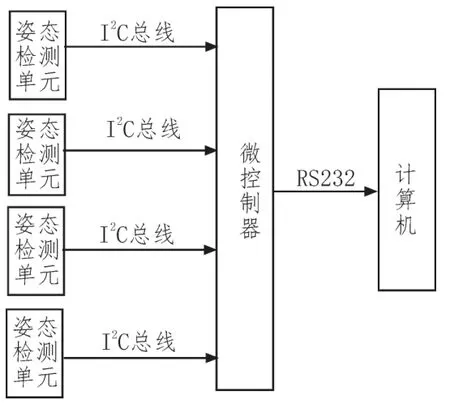
圖2 運動姿態收集和識別系統的基本構成
2.2 姿態檢測模塊
姿態檢測屬于運動姿態收集和識別系統功能中的主要組成部分,本文所設計的姿態檢測單元使用三軸磁阻傳感器,將傳感器檢測載體坐標系各個軸加速度分量,通過磁阻傳感器對磁場在載體坐標系統中各個軸的分量進行檢測,通過信號放大電路到微處理器中輸送[7]。圖3為姿態檢測單元的結構。

圖3 姿態檢測單元的結構
姿態檢測單元和為空氣利用I2C總線實現數據的通信,比如姿態檢測單元收集數據的讀入及微控制器控制命令的寫入,I2C總線是通過兩線式串行總線,其主要目的就是連接外圍設備和微控制器,其主要優勢就是簡單并且有效,總線長度范圍較大,最高為25英尺,能夠支持40個組件通過最大傳輸速率同時的傳輸,其還能夠支持多主控,簡單來說就是能夠發送機接受的設備都能夠成為主總線[8]。
2.3 數據收集
數據收集模塊屬于人體運動姿態識別系統中的最底層,是得到人體運動信息的主要途徑,此模塊通過集成收集裝置中加速度傳感器得到人體運動過程中的加速度信號,并且將數據對終端進行傳輸,所得到加速度數據質量和識別系統性能具有密切的聯系。目前,并沒有標準數據收集平臺,并且標準的數據集也較少,所以就要設計能夠滿足自身需求的收集裝置[9]。圖4為數據收集平臺和硬件結構。
在實現數據收集器設計的過程中,一般會將加速度傳感器、數據存儲等模塊都在收集器中集成,之后利用某種數據傳輸方式使收集器存儲數據能夠到計算機設備和其他設備中進行傳輸及處理。利用傳輸技術實現有線及無線傳輸的劃分。在使用有線傳輸收集器的過程中,收集數據利用有線傳輸介質到計算機設備中傳輸,其的可靠性比較高,但是人體佩戴舒適度并不高,并且使用范圍有所限制。為了能夠有效提高數據穩定性及可靠性,部分研究人員將其到收集器中集成,從而能夠有效避免數據傳輸過程種數據的錯誤及丟失,提高了收集器設計的復雜程度,并且對于姿態識別算法實時性提出了較高的需求[10]。

圖4 數據收集平臺及硬件結構
2.4 特征的收集
在收集原始加速度信號值或者利用預處理加速度信號值,雖然其能夠在人體姿態識別系統中使用,但是原始的加速度辛哈之中的人體運動物理意義比較狹隘,識別率較低。在人體運動姿態識別系統中,一般都是會對原始加速度信號值實現特征選擇和提取,并。目前,特征提取和選擇并沒有統一標準,不同系統識別行為及分類方法不同,所以使用的信號特征也不同,不同特征對于分類器識別效率的影響也會不同。一般通信信號的分析方式主要包括頻域分析、時域分析、時頻分析[11],表1為使用較多的特征。

表1 常使用的特征列表
3 系統的硬件電路設計
3.1 加速度傳感器
可以佩戴的設備傳感器的體積要小,并且成本和功耗要低,要求具有較高的靈敏度,所以可以使用微電子機械系統傳感器,其能夠保證數據傳輸過程中沒有遲延,并且還能夠連接磁力計,適應于穿戴設備產品中開發使用,并且其具有較高的靈敏度。綜合考慮低成本、低功耗及頻段開放等3方面的因素,選擇數據傳輸的方式。通過藍牙4.0方式實現數據傳輸,從而能夠保證可穿戴設備在靜態工作時候能夠長時間使用,并且此芯片的價格比價便宜,便于量產和研究,藍牙4.0也具有開放性的頻段,所以能夠實現主機及從機的數據傳輸[12],圖5為系統硬件的構成。
3.2 姿態收集系統
姿態核心處理部分主要包括CC2451處理器作為核心創建下位機,主要包括從機與主機,從機中具有加速度收集芯片的集成。系統實現數據包的發送主要包括:
1)將主機和從機打開,保證主機和從機相互攔截;
2)上位機下法收集指令對主機進行發送,主機接收到指令之后對從機發送,以此收集數據。圖6為主機的運行邏輯。
3)從機中的MPU加速度傳感器收集運動過程中的三軸加速度信息和陀螺儀信息,從而得到人體上肢運動過程中的運動信息,并且從機對藍牙傳送實施數據[14]。

圖6 主機的運行邏輯
在兩幀發送完整加速度計和陀螺儀數據之后主機接受從機發送的數據,利用串口將數據到上位機中發送,從而實現數據的實時收集,并且保存數據,直到上位機實現停止命令的發送,這個時候的從機和主機都會進入到待機狀態。圖7為從機運行過程中的邏輯。

圖7 從機運行邏輯圖
3.3 上肢運動姿態的數據收集
在上肢運動,上肢在豎直軸、水平軸和縱軸3個方向都會具有加速度,利用SMP軟件編程將加速度值轉換成為角度信息,這個時候就能夠收集上肢空間中俯仰角、橫滾角和航偏角的信息。在人體運動的時候因為運動頻率和幅度都會出現不同的變化,所以這3個方向具有一定的差別,從而就要實現人體建模,圖8為人體的模型。
在進行數據收集的過程中,要在上臂相同位置中佩戴收集儀器,之后將收集的數據根據相同的模式實現數據處理,為了能夠有效提高收集數據精準性,要想避免數據在收集過程中收集上肢觸碰的物體,從而產生較大的加速度,圖9為數據的收集界面。從機將收集的加速度和陀螺儀數據使用藍牙方式對主機進行發送,主機在接收到數據之后利用串口發送計算機端數據,實現數據處理[15]。

圖8 人體的模型

圖9 數據的收集界面
4 系統的調試和結果分析
4.1 系統的調試
在創建系統硬件和軟件之后,就要設計調試方案測試系統整體的功能,本文研究系統主要包括硬件及軟件的代碼,其在調試過程中具有多種方法,并且也能夠使用多種工具。通過系統局部及整體調試,發現系統中存在的漏洞并且完善。
在調試硬件過程中,首先創建具有VGA顯示器及SDRAM工程,使其能夠成為顯示器緩存,之后在顯示器中顯示,表示能夠將圖像顯示出來。在調試圖像收集、存儲和顯示之后,表示硬件系統中的各個模塊都能夠正常的工作。
在本文系統中,軟件的調試主要是利用編程實現驗證,其主要目的就是查看數據是否能夠正常的讀取,從而保證后續的處理精準度。對圖片進行水平掃描,輸出灰度256色,設置最大的高度及寬度都為112,輸出的類型為C語言,將圖像信息文件實現編程測試,對數據正確性進行測試。由于圖像處理過程中具有多種算法,所以就要使用大量測試樣本實現對比分析算法,通過對比驗證之后,在Nios平臺中實現。在完成每部操作處理之后,對函數進行調用,以此在顯示屏中顯示處理的結果,從而對實時處理結果進行查看[16]。
在調試硬件及軟件之后創建系統整體輸入,詳見圖10。

圖10 系統的整體實物
4.2 系統的測試
通過系統調試之后,系統攝像頭能夠實時的實現目標圖像的收集,并且在顯示器中顯示收集的圖像[17]。在運行之后,系統模塊運行正常,沒有其他異常現象,表示系統設計正確。
5 結束語
文中實現了基于藍牙4.0的人體上肢運動姿態收集及識別系統的設計,能夠利用姿態檢測單元得到人體上肢運動姿態參數[18],之后利用人體上肢運動姿態系統得到運動角度及位置,表示人體上肢運動姿態變化的定量化描述。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34