基于泛在位置服務的嵌入式導航計算機系統設計分析
2018-08-25 08:14:50劉蔚
電子設計工程 2018年16期
劉蔚
(陜西財經職業技術學院陜西咸陽712000)
泛在的意思就是無所不在,泛在位置服務指的就是實現信息及物理的空間無縫對接,從而使服務具有無所不包、無所不在和無所不能的特點,還能夠使人們實現任何地點、任何時間、任何物和任何人都能夠順利的通信,從而利用合適終端設備實現接入網的相互通信,以此得到無所不在及無時無刻的位置服務[1]。SINS屬于捷聯慣性導航系統,其具有自主導航的能力,不需要外界的電磁信號就能夠具有獨立速度、姿態及位置的信息,并且具有較強的抗外界干擾能力,但是無法實現具有較高的精度任務[2]。GPS屬于高精度的全球三維實時衛星導航系統,并且具有高精度及全天候的優勢,但是其具有較差的自主性和抗干擾能力,無法滿足快速的實時導航需求。現代定位導航技術都具有自身的優缺點,使用卡爾曼濾波器能夠將現代定位導航技術兩個相互結合,從而組合成為全新的導航系統,從而組合成為具有較高精度的導航任務[3],基于此,本文就針對基于泛在位置服務的嵌入式導航計算機系統的設計進行全面分析。
1 嵌入式導航計算機系統的需求
首先,以現代導航系統功能特點為基礎,可以將系統功能分為3部分,分別為數據收集、導航參數運算及數據的輸出。
其中數據收集指的是根據系統輸出信號,將不同信號轉化成為統一數據信號實現收集;
導航數據輸出指的是根據針對性的方式實現控制系統的輸出,從而使控制系統解算之后對運載體的速度及姿態進行調整,以此使其能夠到達正確的目標位置中;
導航參數的解算主要目的就是實現位置姿態信息計算,要求其具有一定的數據處理能力[4]。
另外,導航計算機屬于系統的核心處理器,其除了以上基本的功能之外,還要求其具有自身的獨特性能,從而對系統整體能夠造成影響,包括系統應用范圍。本文所研究系統的性能需求主要包括以下方面:
要求導航計算機具有較高的實時性,計算機接口的主要目的就是實現實時的輸入和輸出,所以在導航精度需求不斷提高的過程中,對于導航計算機實時性的需求也在不斷的提高。
要求導航系統的體積較小;
要求導航計算機系統具有較低的功耗,并且保證系統運行過程中的可靠性;
要求導航計算機系統的性價比較高,從而提高應用范圍[5]。
2 嵌入式導航計算機系統的框架
根據以上需求,實現嵌入式導航計算機系統的框架設計,詳見圖1。
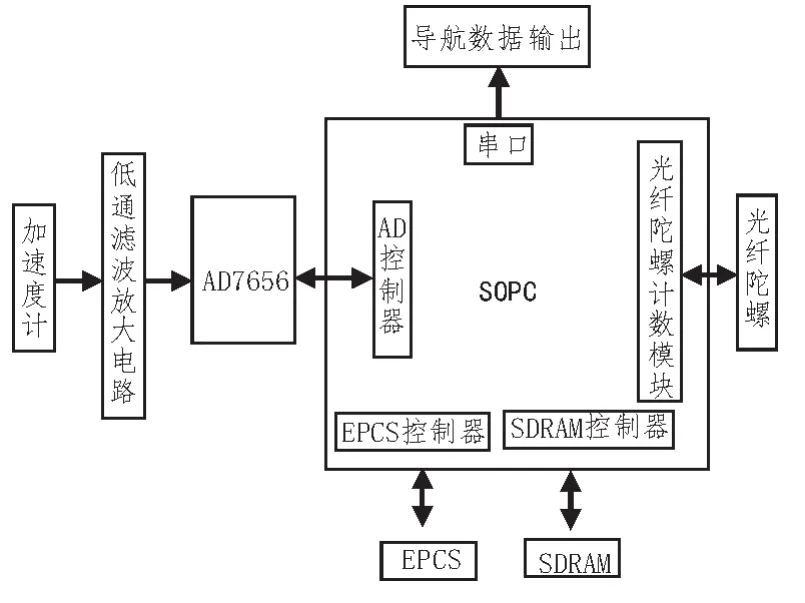
圖1 嵌入式導航計算機系統的框架設計
3 嵌入式導航計算機系統的硬件設計
導航計算機系統的硬件電路設計主要包括軟核處理器、外圍電路。
3.1 軟核處理器
現代軟核處理器主要包括3種,分別為高性能軟核、精簡軟核和標準軟核。軟核處理器的開發套件較為完善,主要包括集成開發環境、編譯器、調試器和協議棧。圖2為軟核處理器的結構。
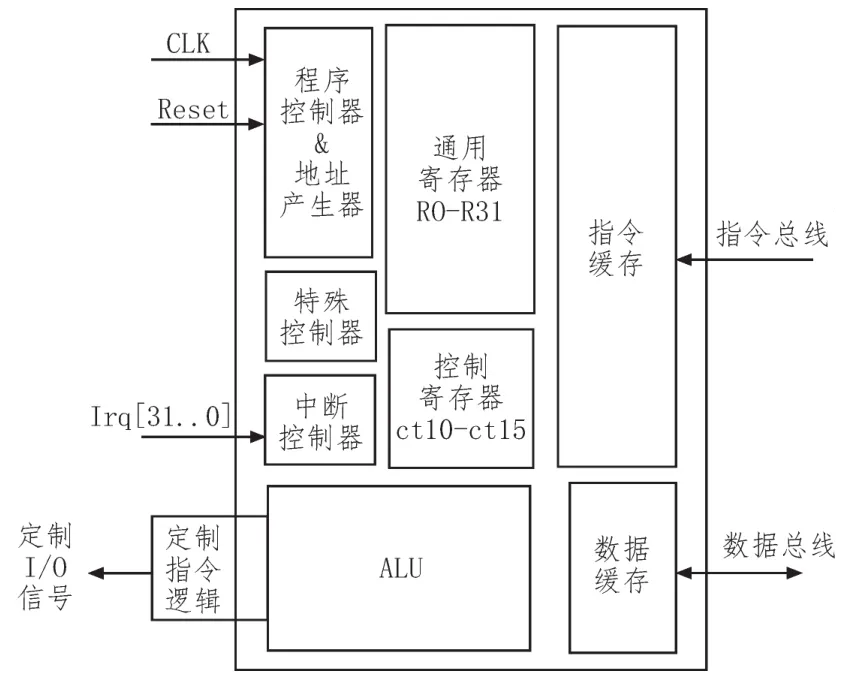
圖2 軟核處理器的結構
3.2 接口電路的設計
其一,電源電路。圖3為供電電路,其功率及電流較低,電路簡單,能夠使用。
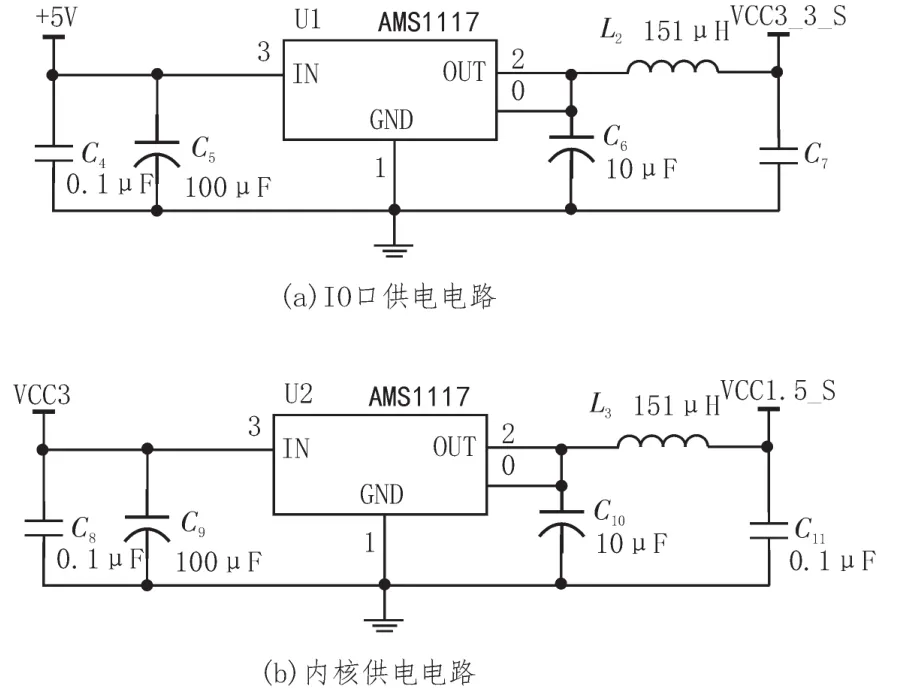
圖3 供電電路的結構
其二,接口電路。一般在嵌入式導航計算機系統中,需要實現SDRAM的外部接口,因為其的成本較低,容量較高優勢,所以要選擇使用SDRAM作為程序在運行過程中的外部存儲器。SDRAM動態存儲單位是通過管柵極電容實現電荷存儲的原理創建,但是因為此柵極電容容量比較小,那么其保存電荷的時間有限,所以為了能夠實現漏掉電荷的補充,避免信號存儲丟失,就要定期進行電荷補充[6]。圖4為SDRAM接口電路的創建。
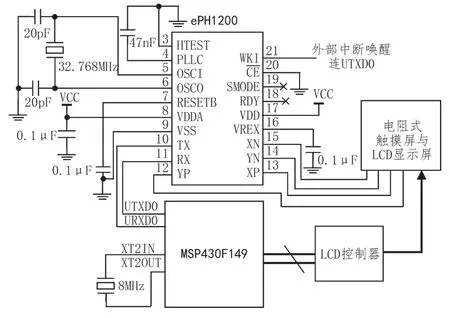
圖4 SDRAM接口電路的創建
其三,加速度調理電路。此部分電路能夠實現加速度信號的隔離、變換、濾波及放大處理,從而使輸入信號滿足A/D轉換的需求。圖5為單路電路的構成。
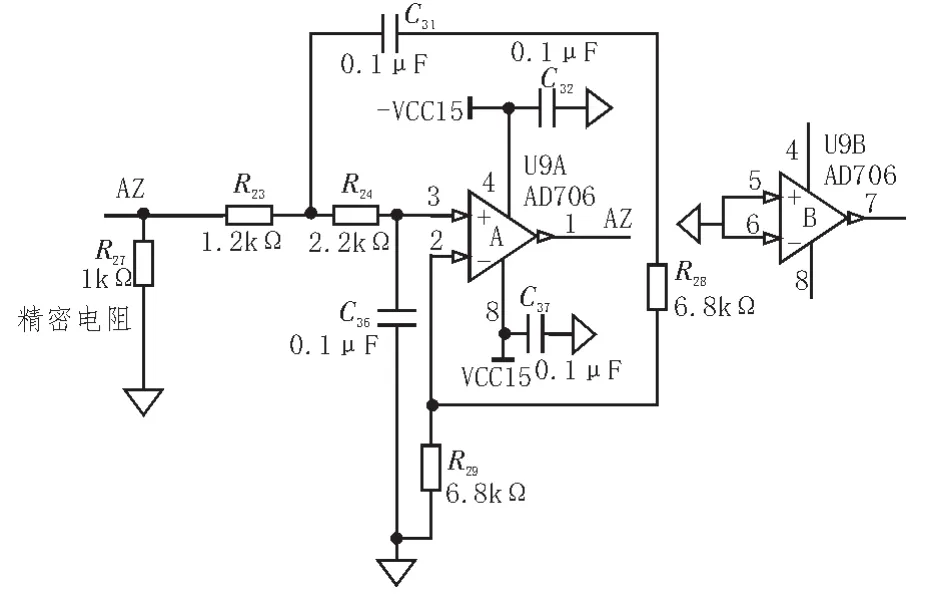
圖5 單路電路的構成
4 嵌入式導航計算機系統的軟件系統
4.1 數據發送模塊
數據發送模塊要將收集到的內容到寄存器中存儲,之后發送幀串行數據,包括串行數據位、起始位、奇偶位及停止位。為了能夠對狀態并行數據及發送串行數據進行控制,就要具有發送移位寄存器及控制器。在實現串行數據發送的過程中,要將信號發送器實現數據位、起始位的選擇,控制器的主要目的就是對數據的發送進行控制。控制器的主要目的就是對控制器進行數據的發送,從而產生起始位,對兩計數器的計數進行控制[7]。圖6為系統的發送模塊結構。
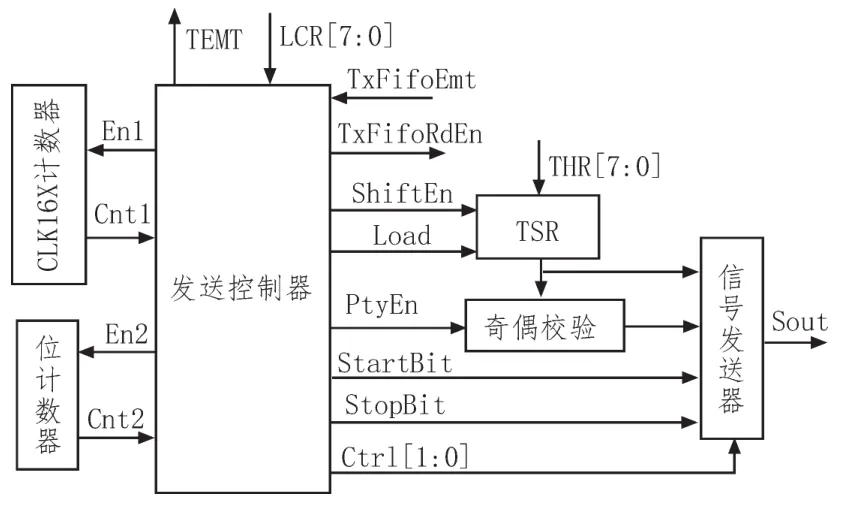
圖6 系統的發送模塊結構
發送控制器屬于發送模塊中的核心單位,能夠對發送器的其他模塊進行協調控制,通過狀態機進行實現[8]。圖7為發送該控制的轉臺轉移圖。
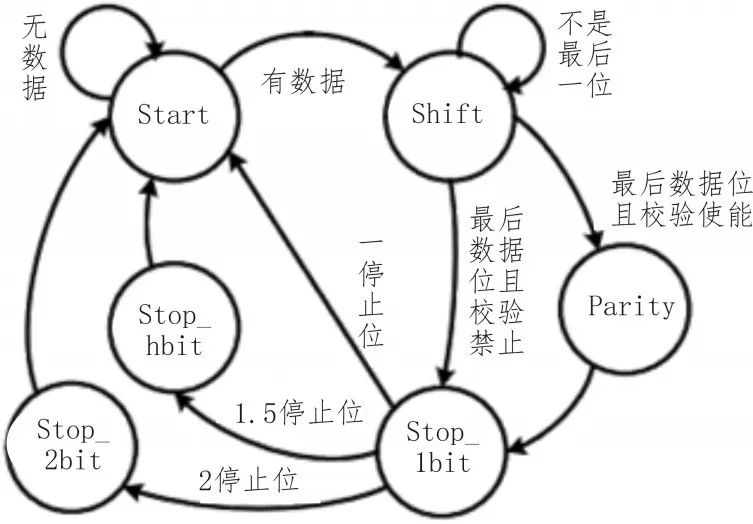
圖7 發送該控制的轉臺轉移圖
4.2 數據接收模塊
數據接收模塊要進行起始位檢測,之后對數據進行接收,然后實現奇偶校驗,對停止位進行識別,最后出現錯誤狀態信息,在接收模塊中實現結果的寫入。所以,接收模塊要求具有接收移位寄存器、奇偶校驗器、控制器和起始位的檢測電路,和接收模塊相同[9]。圖8為接收模塊的結構。
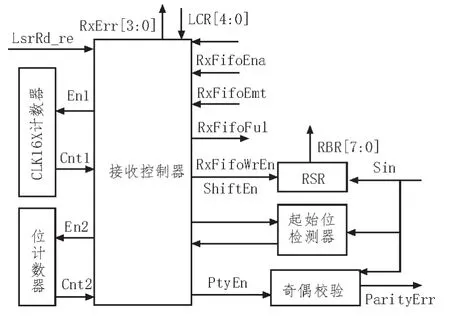
圖8 接收模塊的結構
此模塊中的接收控制器主要是通過有限狀態機進行實現,以接收數據幀為基礎,從而實現狀態的轉換[10]。圖9為狀態的轉換過程。
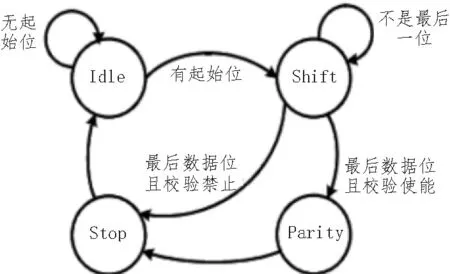
圖9 狀態的轉換過程
4.3 路徑規劃模塊
路徑規劃模塊的主要目的就是使駕駛人員在旅行過程中實現行駛路程的規劃,其也是路徑導航中的基本模塊,其能夠有效實現導航功能。其在城市密集道路網中行駛,根據側重點不同,從目前為止到目的為止的路線方案也各不相同,比如最高性價比、最優路徑和最短時間,從而為駕駛人員在道路選擇過程中提供較多的條件[11]。此模塊能夠在數字地圖中實現導航路徑和起始點、目的地坐標的輸入,用戶能夠利用路徑分析實現路徑的自動規劃,從而將規劃之后的路徑對路徑處理進行提交,并且顯示,進行保存入庫[12]。圖10為嵌入式導航系統的導航技術方案。
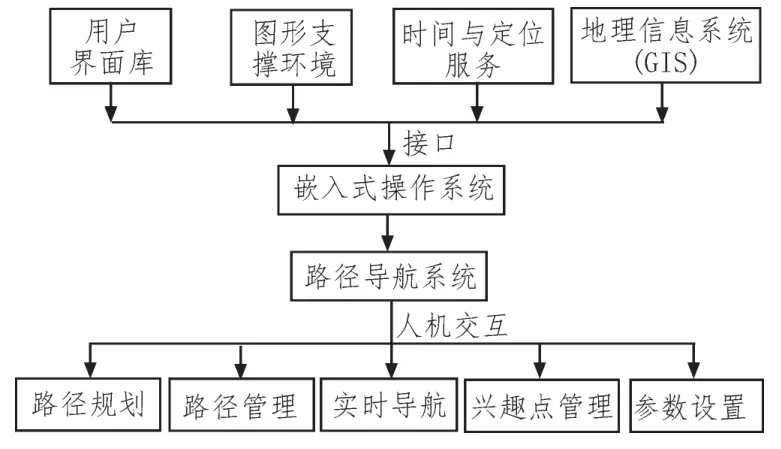
圖10 嵌入式導航系統的導航技術方案
5 系統的實現
5.1 路徑規劃
路徑規劃主要包括數據顯示及數據解碼模塊,用戶利用人機界面對用戶在數字地圖中的最佳路徑位置進行規劃,將點位數據到導航路徑中進行輸入,并且將規劃實現的導航路徑到路徑數據庫中進行存儲。數據顯示模塊的主要目的就是以系統參數配置為基礎,實現用戶規劃路徑的可視化展現。數據解碼模塊的主要目的就是實現路徑數據的恢復,用戶能夠利用觸摸屏及鼠標在系統界面中繪制手動該路徑[13],圖11為系統路徑規劃的實現效果。

圖11 系統路徑規劃的實現效果
5.2 實時導航
實時導航主要包括偏航報警、數據顯示及軌跡記錄模塊,其中的軌跡記錄模塊主要目的就是對目前位置信息進行接收,并且對歷史軌跡信息進行保存。偏航報警模塊的主要目的就是對目前導航路徑偏移量及位置進行計算,在偏移量較大的時候,就要實現用戶報警[14]。圖12為系統實時導航的執行序列。
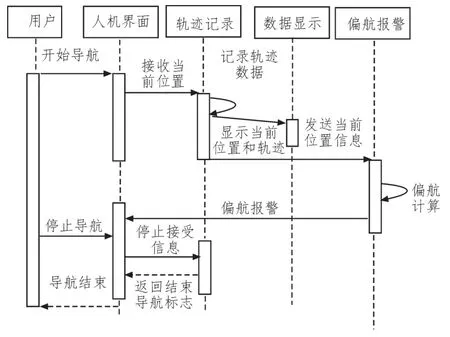
圖12 系統實時導航的執行序列
5.3 系統參數的設置
系統參數的設置主要是利用人機交互界面實現,設置偏航閾值、導航路徑顏色及導航軌跡,參數的設置功能對相應的設置結果進行返回,用戶利用鼠標及觸摸屏對自身需求參數進行設置,設置完成之后點擊確定,并且在導航電子地圖中進行展現[15]。圖13為參數的設置效果。
5.4 路徑管理
路徑管理的主要包括路徑保存、路徑刪除、路徑瀏覽模塊構成,首先用戶要利用路徑保存模塊實現導航路徑的接收和規劃,用戶利用對文件系統中導航路徑進行讀取,在用戶對導航路徑查看的時候,能夠利用路徑瀏覽模塊進行查看,用戶的所有操作都是利用人機界面交互實現[16]。
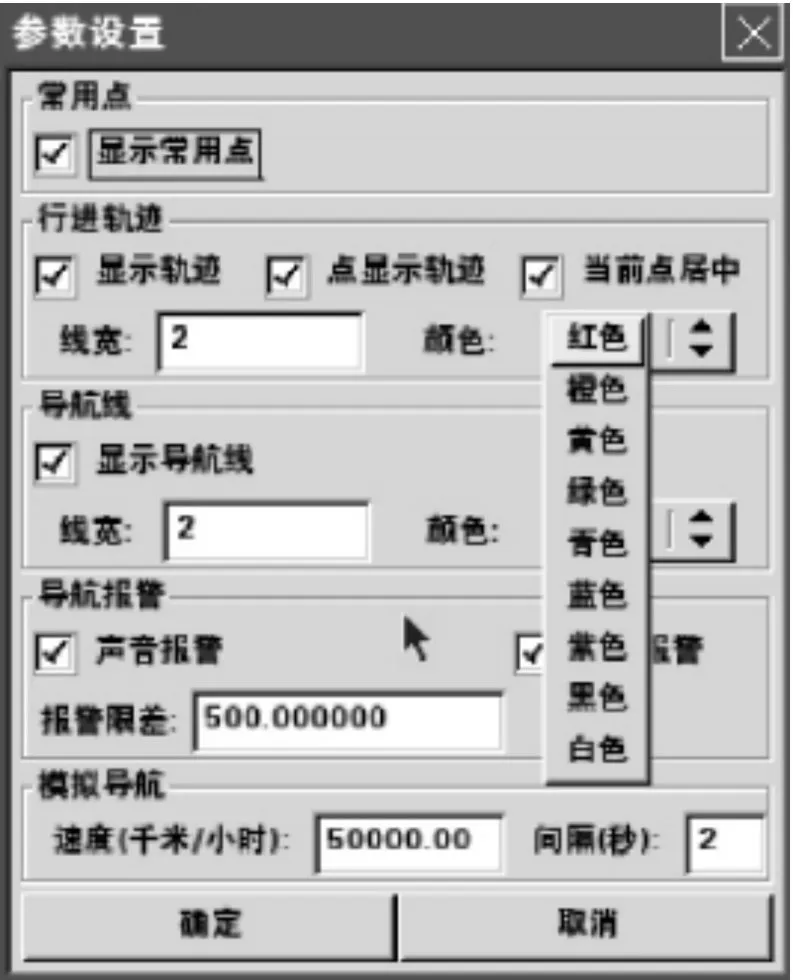
圖13 參數的設置效果
6 結束語
根據定位的多種方式優缺點,本文就提出了基于泛在位置服務的系統,實現了系統硬件電路及軟件模塊的設計[17]。本文最后通過系統實現表示,此系統的重量較輕、體積較小、具有較強的自主性,并且成本較低,而且還能夠提供大量的質量導航信息,其具有一定的應用價值及發展前景。
猜你喜歡
鐵道通信信號(2018年2期)2018-04-18 12:18:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
電鍍與環保(2016年3期)2017-01-20 08:15:32
商用汽車(2016年11期)2016-12-19 01:20:16
中國衛生(2016年2期)2016-11-12 13:22:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
中國工程咨詢(2016年4期)2016-02-14 07:28:28
創業家(2015年5期)2015-02-27 07:53:25