一種新型車載雷達天線艙開合系統的設計
2018-08-24 07:51:42,,,,
計算機測量與控制 2018年8期
,,,,
(1.西北工業大學明德學院,西安 710124; 2.西安晨曦航空科技股份有限公司,西安 710077;3.陜西捷普控制技術有限公司,西安 712000)
0 引言
車載雷達[1]系統因其具有良好的機動性而被廣泛應用在民用和軍事領域。車載雷達在運輸的過程中,一般都要將天線撤收在天線艙內,工作的時候,打開天線艙,將天線伸出,然后再工作[2]。在傳統車載雷達天線艙開合系統中,天線艙的打開和關閉采用繼電器組合來控制電動推桿電機的電流方向,從而實現電機的正反轉,達到控制電動推桿伸縮的目的。由于采用繼電器直接加電,車載雷達天線艙在剛打開的時候,電動推桿瞬間加電,天線艙由靜止轉為運動,此時電動推桿電機的電流很大,容易造成電動推桿的電機以及機械結構損壞,同時,由于采用開環控制,沒有對左、右推桿的實時位移進行采集和比較,并作出相應的調整,左、右兩個電動推桿因個體差異和受力的不同,其速度不一致,導致左、右推桿的位移不一致,在位移差較大的情況下,容易造成天線艙結構的變形和損壞。
1 設計概述
新型車載雷達天線艙開合系統電動推桿的驅動采用PWM+MOS管的全橋驅動電路和全數字控制技術,可以方便、可靠地實現電動推桿啟動時的加速過程和停止時的減速過程,有效地解決了傳統雷達天線艙開合系統電機啟動時瞬間電流過大和停止時產生的反向電動勢對系統造成的損害。
同時,新型車載雷達天線艙開合系統與傳統的開合系統相比,增加了鉸鏈直線位移傳感器,將其與電動推桿并聯安裝,如圖1所示。天線艙左、右兩側各安裝一對,用于實時測量左、右電動推桿的位移,控制程序根據左、右電動推桿的位移,實時調整左、右電動推桿的速度,使左、右電動推桿的位移保持一致,確保天線艙在打開和關閉的過程中,結構不發生變形、損壞。該方案還可以特別有效的防止當兩個電動推桿中的一個電動推桿出現故障停止運行,而另一個電動推桿仍在運行導致天線艙損壞的情況。

圖1 鉸鏈直線位移傳感器和電動推桿的安裝
2 電路設計
控制電路主要由微控制器、全橋驅動電路、濾波電路、AD/C和觸摸顯示屏等組成,如圖2所示。
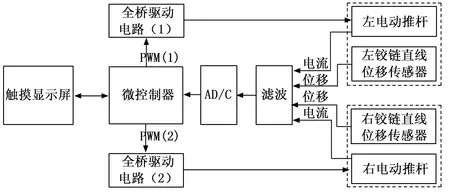
圖2 控制電路組成
2.1 微處理器
微控制器是整個控制電路的核心,采用STM32F103ZGT6高性能ARM處理器,其內核是32位的Cortex-M3,工作頻率高達72 MHz,具有很高的運算速度,在進行PID運算,處理一般的浮點數據時,也顯得游刃有余。STM32F103ZGT6豐富的IO資源,使得其很容易與其他外部設備進行連接,特別是其采用的一種新型的存儲器擴展技術-可變靜態存儲控制器(FSMC),可以簡單方便地與TFT液晶顯示器連接。
在新型車載雷達天線艙開合系統中,由于TFT液晶顯示器要顯示彩色圖片以及大量漢字信息,因此,程序中需要大量的存儲空間對圖片、漢字等常量數據進行存儲,而STM32F103ZGT6內部1MB的內部Flash和96kB的SRAM正好可以滿足這個需求,而無需擴展片外大容量NAND FLASH芯片,降低了系統成本,簡化了系統的軟、硬件設計工作。
PWM信號在現代數字控制技術中廣泛應用,特別是電機驅動、測量、功率控制與變換等方面。STM32F103ZGT6內部有多個可以工作于PWM模式的定時器,為系統的設計和精確控制帶來了極大的方便。
在新型車載雷達天線艙開合系統中,STM32F103ZGT6作為控制核心,主要用于對采集到的左、右鉸鏈直線位移傳感器的數據經過PID算法[3]處理后,轉換成對左、右電動推桿速度[4]控制的控制量,即PWM信號的占空比[5],并輸出相應的PWM信號。PWM信號由STM32F103ZGT6的定時器8[6]產生,通過PC6和PC7兩個引腳輸出兩路PWM信號,用于控制左、右電動推桿。在STM32F103中,PWM信號的頻率(Fpwm)由ARR寄存器的值和PSC寄存器的值決定,占空比(Duty)由CCRx和ARR的值決定,分別如式(1)和式(2)所示:
Fpwm= 72000000/((ARR+1)*(PSC+1))
(1)
Duty=CCRx/ARR
(2)
在驅動直流電機的過程中,如果PWM信號的頻率太低,電機的振動比較大,產生較大的刺耳聲,如果PWM信號的頻率太高,驅動電路的MOS管開關損耗比較大,管子發熱厲害。考慮到系統選用的直流電機的特性以及為了避免電機產生刺耳的聲音,并降低開關損耗,在新型車載雷達天線艙開合系統中,PWM信號的頻率采用20 kHz。
2.2 電機驅動電路
新型車載雷達天線艙開合系統的電機選用兩個24 V/5A的直流電機,直流電機驅動電路采用IR2104和IRF3205組成的H橋驅動電路[7],電路如圖3所示。
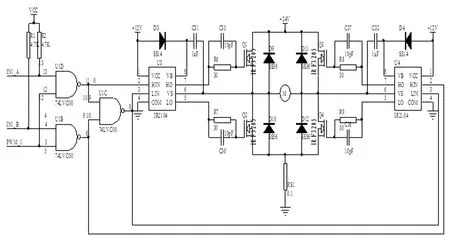
圖3 電機驅動電路
在圖3電機驅動電路中,4個IRF3205的驅動采用2片IR公司的IR2104,IR2104是一款內置520 ns(典型值)死區時間的高壓、高速半橋驅動芯片,具有非常高的可靠性和非常優良的驅動性能。內置死區時間的存在,可以有效的防止上、下橋臂的導通,提高驅動電路的可靠性。圖3中,C31、C32為IR2104的自舉電容,C35、C36、C37、C38為MOS管驅動的加速電容,可以有效的加速MOS管的導通和關斷速度。
PWM_1即為用于控制電機轉速的PWM信號。U1B、U1C、U1D為74LVC00,形成組合邏輯電路,用于控制電機的轉動方向。通過改變IN1_A和IN1_B的電平即可改變電機的轉動方向。即當IN1_A和IN1_B分別為高、低電平時,電機正轉;當IN1_A和IN1_B分別為低、高電平時,電機則反轉;當IN1_A和IN1_B電平相同時,電機則停止轉動。IN1_A和IN1_B與STM32F103ZGT6的兩個普通IO連接。
2.3 電路信號濾波電路
新型車載雷達天線艙開合系統在運行的過程中,有可能發生意外情況,導致天線艙無法正常打開,致使電動推桿電機電流過大,因此,微處理器在通過電機驅動電路對電動推桿進行驅動的同時,需要對兩個電動推桿的電流進行實時采樣,實現對電動推桿電機的過流保護。
由于電機驅動采用PWM控制,且電機為感性負載,流經電動推桿電機的脈沖電流會發生畸變,因此需要對電機的電流信號進行濾波,才能得到穩定有效電流信號。電流信號濾波電路如圖4所示。
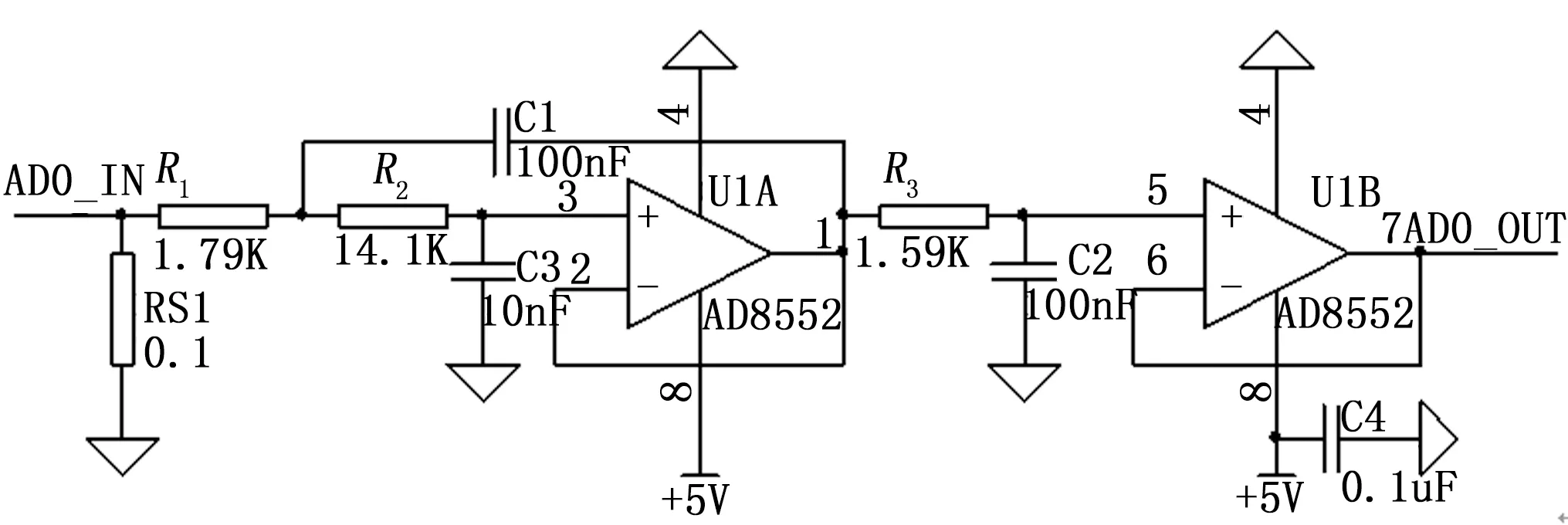
圖4 電流信號濾波電路
圖4中,RS1為電流采樣電阻,電機電流流過采樣電阻,在RS1上形成電壓信號,該信號經過以雙通道運算放大器AD8552[8]為核心的三階巴特沃茲低通濾波器[9]后,由AD/C進行采樣。巴特沃茲濾波器具有通帶內最大平坦的振幅特性。三階巴特沃茲低通濾波器由前、后兩級組成,前級由R1、R2、C1、C3、U1A構成增益(K)為1的二階Sallen Key有源低通濾波電路,其截止頻率fc1和Q值分別如式(3)和式(4)所示。后級由R3、C2組成一階無源RC濾波器,其截止頻率fc2如式(5)所示:
(3)
(4)
(5)
式(4)中,K等于1。
2.4 AD轉換電路
在新型車載雷達天線艙開合系統中,為了提高控制的精度以及良好的過流保護性能,電動推桿的位移數據以及電動推桿電機電流的采集,不采用STM32F103ZGT6內部的12位AD/C,而采用外部專用AD轉換芯片ADS8344。
ADS8344為8通道單端或者4通道差分輸入的16位AD轉換芯片,高達100 kHz的轉換速率以及84dB的信噪比。ADS8344通過SPI接口與STM32F103ZGT6連接,只需5根控制信號線,分別為DIN、BUSY、DOUT、CS、DCLK,大大簡化了電路設計工作。AD轉換電路如圖5所示。
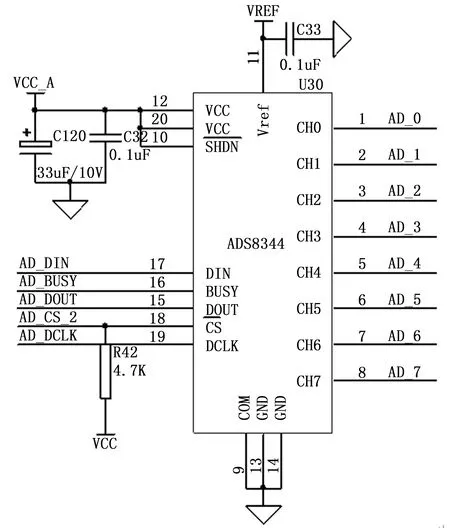
圖5 AD轉換電路
2.5 觸摸屏
觸摸顯示屏主要用來控制天線艙、天線等部件的打開、關閉動作,同時實時顯示左右電動推桿的位移、電流、工作狀態以及故障代碼等信息。考慮到電阻屏需要校準的問題,給使用帶來不便,因此,車載雷達天線艙開合系統的觸摸顯示屏采用800×480的TFT電容觸摸屏,與電阻觸摸屏相比,電容式觸摸屏具有耐磨損、壽命長、用戶使用時維護成本低,且電容觸摸屏在生產后只需要一次或者完全不需要校正等特點。STM32F103ZGT6通過FSMC接口與電容觸摸屏連接,這樣微處理器就可以像讀寫外部存儲器一樣來讀寫電容觸摸屏,大大提高了程序的運行效率。
3 控制算法
在理想狀態下,微處理器輸出兩路頻率和占空比固定的PWM信號時,左、右電動推桿將以相同的速度勻速運行。實際上,雖然左、右電動推桿采用的是同一型號的電機,但電機個體存在一定的差異,且左、右電動推桿的受力情況并不一定相同,導致左、右電動推桿的實際運行速度存在差異,這個差異可能不是特別明顯,但經過時間的積累,累計誤差將會較大,最終可能導致天線艙結構變形,甚至損壞。
PID算法具有原理簡單、易于實現、適用面廣、各控制參數相互獨立等特點,在自動控制中廣泛應用。應用較多的有增量式算法和位置式算法。位置式PID算法的輸出與整個控制的過去狀態有關,用到了誤差的累加,因此位置式PID算法的累積誤差相對來說較大,位置式PID算法更適用于執行機構不帶積分部件的對象,如電液伺服閥等。由于增量式PID算法的輸出只與當前拍和前兩拍的誤差有關,且輸出的是控制量增量,并無積分作用,如果控制系統出現故障,由于執行機構本身有記憶功能,可仍保持原位,誤動作影響較小,適用于執行機構帶積分部件的對象。
根據電動推桿和系統的特性,新型車載雷達開合系統的控制算法采用增量式PID[10]控制算法,其控制原理如圖6所示。

圖6 PID控制原理
圖6中,r(k)為設定的控制量,即正常情況下PWM信號的占空比,u1(k)和u2(k)分別為左、右電動推桿的實際控制量,u1(k)=r(k)+u(k),u2(k)=r(k)-u(k),y1(k)和y2(k)分別為左、右電動推桿的位移量,e(k) 為左、右電動推桿的位移差,e(k)=y1(k)-y2(k),u(k)為PID調節器的輸出。
在本車載雷達天線倉開合系統中,控制的最終目的是要使左、右電動推桿的實時位移差e(k)到達預定的值,該預定的值即為在機械安裝時,左、右電動推桿的安裝公差。該公差可以在系統安裝完成后,進行實際測量,并將該參數寫入控制程序,在程序中進行標定。
控制算法流程[11]如圖7所示,其中e(k)為當前誤差,e(k-1)為上一次誤差,e(k-2)為上上一次誤差。

圖7 算法流程
PID控制算法具體程序如下:
int dtIncPIDCalc(PID *sptr,int NextPoint)
{
register int iError,iIncpid;
//當前誤差
iError = sptr->SetPoint-NextPoint;
//增量計算
iIncpid= (sptr->Proportion*iError)-(sptr->Integral*sptr->LastError)+(sptr->Derivative*sptr->PrevError);
//誤差更新,用于下次計算
sptr->PrevError = sptr->LastError;
sptr->LastError = iError;
//返回增量值
return(iIncpid);
}
void PID_Control(unsigned char Status)
{
int dtpwm,dTotal,Lpwm,Rpwm;
//左、右推桿的固有安裝誤差,單位:mm
dSPEED.SetPoint = -2;
//左、右推桿的位移差
dTotal = Displacements_L -Displacements_R;
dtpwm = dtIncPIDCalc(&dSPEED,dTotal);
//基準速度+差分速度
Lpwm = Speed+dtpwm;
if(Lpwm>100)
{
Lpwm = 100;
}
else if(Lpwm<30)
{
Lpwm = 30;
}
//基準速度-差分速度
Rpwm = Speed-dtpwm;
if(Rpwm>SetSpeed)
{
Rpwm = SetSpeed;
}
else if(Rpwm<30)
{
Rpwm = 30;
}
switch(Status)
{
//天線艙打開
case 0x0F:
//修改占空比
TIM8->CCR1=Rpwm;
TIM8->CCR2=Lpwm;
break;
//天線艙關閉
case 0xF0:
//修改PWM占空比
TIM8->CCR1=Lpwm;
TIM8->CCR2=Rpwm;
break;
default:
break;
}
return;
}
控制程序采用“基準速度±差分速度”的控制思想,即控制軟件接收到打開或者關閉天線艙的指令后,其速度Speed按照斜線規律不斷增加,直至達到最大值,然后將最大值作為基準速度,開始運動。在運動的過程中,對左、右電動推桿的位移進行采集并進行減法運算,得到的位移差dTotal作為PID控制器的輸入量,送入DIP控制器,DIP控制器的輸出量dtpwm作為差分速度,左電動推桿的控制量Lpwm = Speed+dtpwm,右電動推桿的控制量Rpwm = Speed-dtpwm。將控制量Lpwm和Rpwm限幅后,賦值給TIM8的CCR1和CCR2寄存器,從而改變PWM信號的占空比,調節左、右電動推桿的速度,使左、右電動推桿的位移差接近左、右推桿的固有安裝誤差。
PID控制算法具有非常強的靈活性,在實際應用中,PID算法的難點并不是編程,而是控制器的比例(P)、積分(I)和微分(D)3個參數的確定,特別是在對電機的控制過程中,要求系統運行是穩定的,在負載變化時,被控制量應能迅速、平穩地被跟蹤、控制。在確定PID控制器參數時,可以根據控制器的參數與系統動態性能和穩態性能之間的定性關系,用實驗的方法來調節控制器的參數。新型車載雷達天線艙開合系統PID算法的3個參數,通過實驗的方法,最終確定為P=10,I=2,D=4。
4 實驗結果與分析
4.1 實驗數據
為了驗證新型車載雷達天線艙開合系統的性能,在系統安裝完成以及控制程序調試完成后進行了測試,主要測試系統開、合時間以及打開、關閉天線艙動作的過程中,左右電動推桿的最大位移差。新型車載雷達天線艙開合系統的測試數據如表1所示。
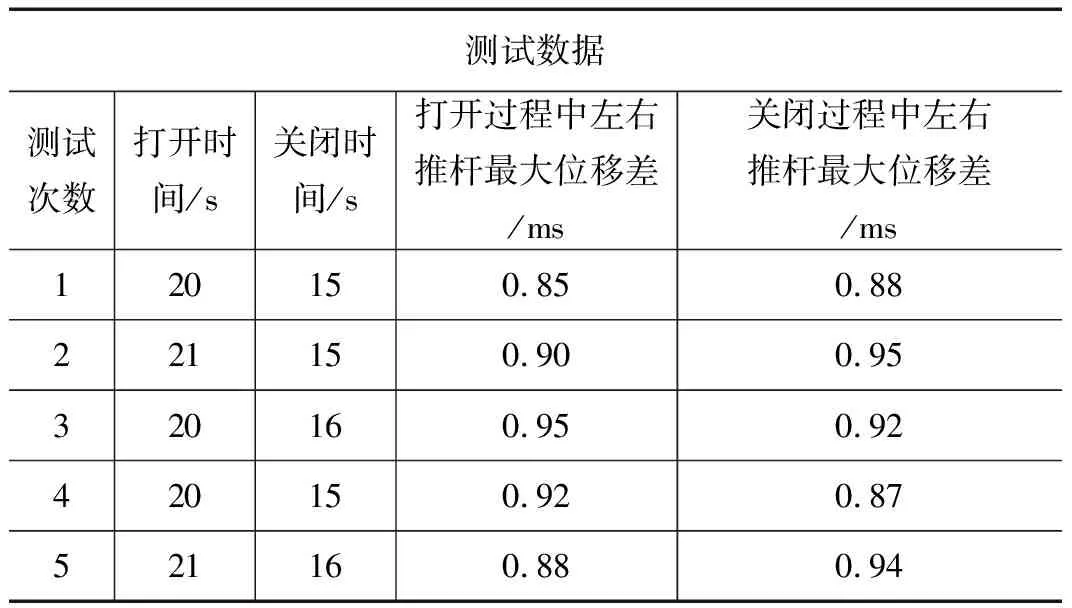
表1 測試數據
4.2 結果分析
從表1的測試數據來看,打開天線艙的時間比關閉天線艙的時間要長,主要是因為在打開天線艙的時候,電動推桿要克服天線艙頂蓋的重力作用做功,而在關閉天線艙的時候,由于天線艙頂蓋的重力作用,加速了天線艙關閉的速度,減少了關閉動作所需要的時間。如果采用更大功率、更小減速比的電動推桿,可以有效的減少打開、關閉天線艙的時間。
從打開和關閉過程中,左右推桿的最大位移差來看,位移誤差均小于1 mm,說明高精度的數據采集為精確控制提供了重要前提,同時PID算法以及“基準速度±差分速度”的程序設計思想對系統的精確控制起到了決定性的作用。
5 結論
本車載雷達天線艙開合系統吸收了傳統車載雷達天線艙開合系統的優點,改變了傳統開合系統中電動推桿的驅動方式,并增加了鉸鏈直線位移傳感器,融入了PID控制算法,通過反復試驗,確定了PID控制算法的比例(KP)、積分(KI)和微分(KD)3個參數,使車載雷達天線艙在打開和關閉的過程中,左、右電動推桿的實時位移誤差始終保持在1 mm以內,且整體運行非常平穩,無明顯的噪聲,并具有完善的保護功能。該系統具有較高的實用價值,在民用和軍用領域有著廣泛的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
