修正鐘差和方位誤差的X射線脈沖星導(dǎo)航
2018-08-24 08:50:36,,,2,
計(jì)算機(jī)測(cè)量與控制 2018年8期
關(guān)鍵詞:模型
,,,2,
(1.西安理工大學(xué) 自動(dòng)化與信息工程學(xué)院,西安 710048;2.中國科學(xué)院 西安光學(xué)精密機(jī)械研究所瞬態(tài)光學(xué)與光子技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,西安 710119)
0 引言
目前,深空探測(cè)器一般都需要地面站的支持才能進(jìn)行導(dǎo)航。但隨著深空探測(cè)器距離地面越來越遠(yuǎn),該導(dǎo)航方式無法提供高精度、實(shí)時(shí)性的導(dǎo)航信息[1]。而提供精確實(shí)時(shí)的導(dǎo)航信息是所有深空探測(cè)的前提和基礎(chǔ)。所以,深空探測(cè)器的自主導(dǎo)航已成為近年來國內(nèi)外研究的熱門課題[2]。
然而深空探測(cè)器經(jīng)過較長(zhǎng)時(shí)間的探測(cè)任務(wù)后,探測(cè)器的時(shí)鐘會(huì)發(fā)生漂移[3]。而時(shí)鐘漂移會(huì)造成系統(tǒng)偏差[2],從而降低X射線脈沖星導(dǎo)航的定位精度。并且脈沖星本身存在的方位偏差也會(huì)影響X射線脈沖星導(dǎo)航的定位精度[4]。
針對(duì)以上問題,本文提出一種考慮鐘差修正與脈沖星方位誤差的X射線脈沖星導(dǎo)航方法。 首先, 使用X射線探測(cè)器測(cè)量脈沖星導(dǎo)航航天器的時(shí)間。根據(jù)鐘差修正模型來處理時(shí)鐘鐘差對(duì)導(dǎo)航的影響。其次,分析脈沖星系統(tǒng)偏差對(duì)導(dǎo)航的影響。時(shí)鐘漂移造成的系統(tǒng)偏差與脈沖星方位誤差造成的系統(tǒng)偏差,同時(shí)作為狀態(tài)向量的增廣分量。最后,本文采用無跡UKF 對(duì)導(dǎo)航信息進(jìn)行處理。
1 量測(cè)模型
1.1 X射線脈沖星量測(cè)模型
脈沖星信號(hào)到達(dá)太陽系質(zhì)心(sun system barycenter,SSB)的時(shí)間可以由脈沖計(jì)時(shí)模型預(yù)報(bào)得到。通過處理量測(cè)值也得到一個(gè)脈沖到達(dá)SSB的時(shí)間。通過時(shí)間轉(zhuǎn)換模型外推可以獲得該脈沖信號(hào)到達(dá)SSB處的時(shí)間[5-6]。再根據(jù)脈沖星的時(shí)間相位模型可以計(jì)算出脈沖真實(shí)達(dá)到SSB的時(shí)間[7]。外推的脈沖到達(dá)時(shí)間(time-of-arrival,TOA)與真實(shí)的到達(dá)時(shí)間之差反映了航天器的位置偏差和鐘差。在航天器上測(cè)量的脈沖TOA可以轉(zhuǎn)換到SSB處對(duì)應(yīng)的TOA[8]:
[-rSC2+ (ni·rsc)2- 2b.rsc+ 2(ni·b)(ni·rsc)] (1)

1.2 方位偏差造成的系統(tǒng)偏差

(2)
式中,Bi是第i顆脈沖星造成的系統(tǒng)偏差。根據(jù)公式(1)與(2),Bi可表示為:

在地心慣性坐標(biāo)系中公式(3)的第三項(xiàng)與第四項(xiàng)可以省略[2],因此,Bi可簡(jiǎn)化為:
(4)
在SSB慣性系統(tǒng)中,X射線脈沖星信號(hào)的時(shí)間相位模型為:
(5)
式中,t0為參考時(shí)間原點(diǎn);f為脈沖星的輻射頻率。則由上式可以獲得脈沖信號(hào)φk到達(dá)SSB的時(shí)間為:
(6)


(7)

(8)
2 動(dòng)力學(xué)模型
2.1 軌道動(dòng)力學(xué)模型
選取地心慣性坐標(biāo)系,導(dǎo)航系統(tǒng)的軌道動(dòng)力學(xué)模型為:
(9)

ae=-μer/r3是地球的引力加速度,μe是地球的引力常數(shù)。
am=-μm(r-rm)/|r-rm|3+rm/|rm|3是月球的引力加速度,μm是月球的引力常數(shù),rm是月球相對(duì)于地球的位置矢量。
as=-μs(r-rs)/|r-rs|3+rs/|rs|3是太陽的引力加速度,μs是太陽的引力常數(shù),rs是太陽相對(duì)于地球的位置矢量。

公式(9)可以簡(jiǎn)寫為:

(10)
式中,狀態(tài)向量X=[r,v,B]T。B=[B1B2...Bm]T是第i顆脈沖星的方位誤差造成的系統(tǒng)偏差,m為脈沖星的總個(gè)數(shù)。w(t)=[wr,wv,wB]T是狀態(tài)過程噪聲,將其假定為協(xié)方差為Q的零均值高斯白噪聲[8]。
2.2 星載時(shí)鐘鐘差模型
星載時(shí)鐘的同步可以通過估計(jì)相對(duì)于標(biāo)準(zhǔn)時(shí)間的時(shí)鐘鐘差、鐘差漂移率和鐘差漂移率的變化率獲得,因此星載時(shí)鐘性能可用白噪聲驅(qū)動(dòng)的三態(tài)多項(xiàng)式進(jìn)行仿真,離散過程的模型和模型噪聲方差[9-10]為:
(11)
Qck(τ)=E[wc(k)wc(k)T]=
(13)
式中,x1,x2,x3分別表示時(shí)鐘鐘差、鐘差漂移率和鐘差漂移率的變化率;τ為時(shí)間間隔;wc1,wc2,wc3為白噪聲;q1,q2,q3為噪聲的功率譜密度;Φc(τ)為狀態(tài)轉(zhuǎn)移矩陣。
2.3 鐘差修正模型

(15)
式中,Φ為增廣后的系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣;Wk=[w(k)Twc1(k)wc2(k)wc3(k)]T為噪聲項(xiàng);O3×3與O6×3為零矩陣;Φk為式(10)經(jīng)離散線性化得到的狀態(tài)轉(zhuǎn)移矩陣。
增廣后的脈沖星導(dǎo)航量測(cè)方程為:
(17)
式中,i用來區(qū)分不同的脈沖星;w1為脈沖星觀測(cè)的噪聲項(xiàng);H1為脈沖星導(dǎo)航的觀測(cè)矩陣:
H1(k)=
(18)
3 仿真實(shí)驗(yàn)與分析
3.1 仿真條件
為了驗(yàn)證本文方法的有效性,將之分別與X射線脈沖星導(dǎo)航方法和X射線脈沖星與多普勒組合導(dǎo)航(X-ray Pulsar/DopplerIntegrated Navigation,XPDIN)方法的估計(jì)結(jié)果相比較。本文使用的脈沖星的參數(shù)信息[12]見表1;X射線背景輻射流量BX為0.005 ph/cm2/s;時(shí)間間隔設(shè)定為500 s;X射線探測(cè)器面積為1 m2;各脈沖的噪聲協(xié)方差分別為109 m、334 m、1 866 m、325 m。
深空探測(cè)器的標(biāo)稱位置初值與標(biāo)稱速度初值分別設(shè)置為(1.270×105,7.124×104,3.090×104) km,(-17.012,25.573,11.411)km/s;星載時(shí)鐘的噪聲譜密度為q1=1.0×10-22s2/s,q2=2.0×10-32s2/s3,q3=6.0×10-45s2/s5;多普勒測(cè)速精度為0.01 m/s。
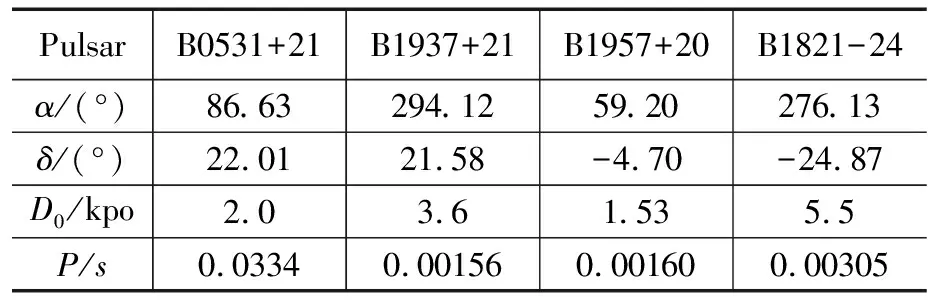
表1 脈沖星的參數(shù)
3.2 仿真結(jié)果及分析
圖1給出了修正鐘差和方位誤差的X射線脈沖星導(dǎo)航和X射線脈沖星導(dǎo)航的對(duì)比結(jié)果。航天器長(zhǎng)時(shí)間航行時(shí),航天器的時(shí)鐘會(huì)發(fā)生偏移,同時(shí)脈沖星的方位不可避免的存在偏差,時(shí)鐘偏差與方位偏差都造成了系統(tǒng)偏差。修正鐘差和方位誤差的X射線脈沖星導(dǎo)航有效的抑制了時(shí)鐘鐘差和方位偏差對(duì)導(dǎo)航精度的影響。同X射線脈沖星導(dǎo)航相比,該方法有更好的導(dǎo)航精度和鐘差修正能力。
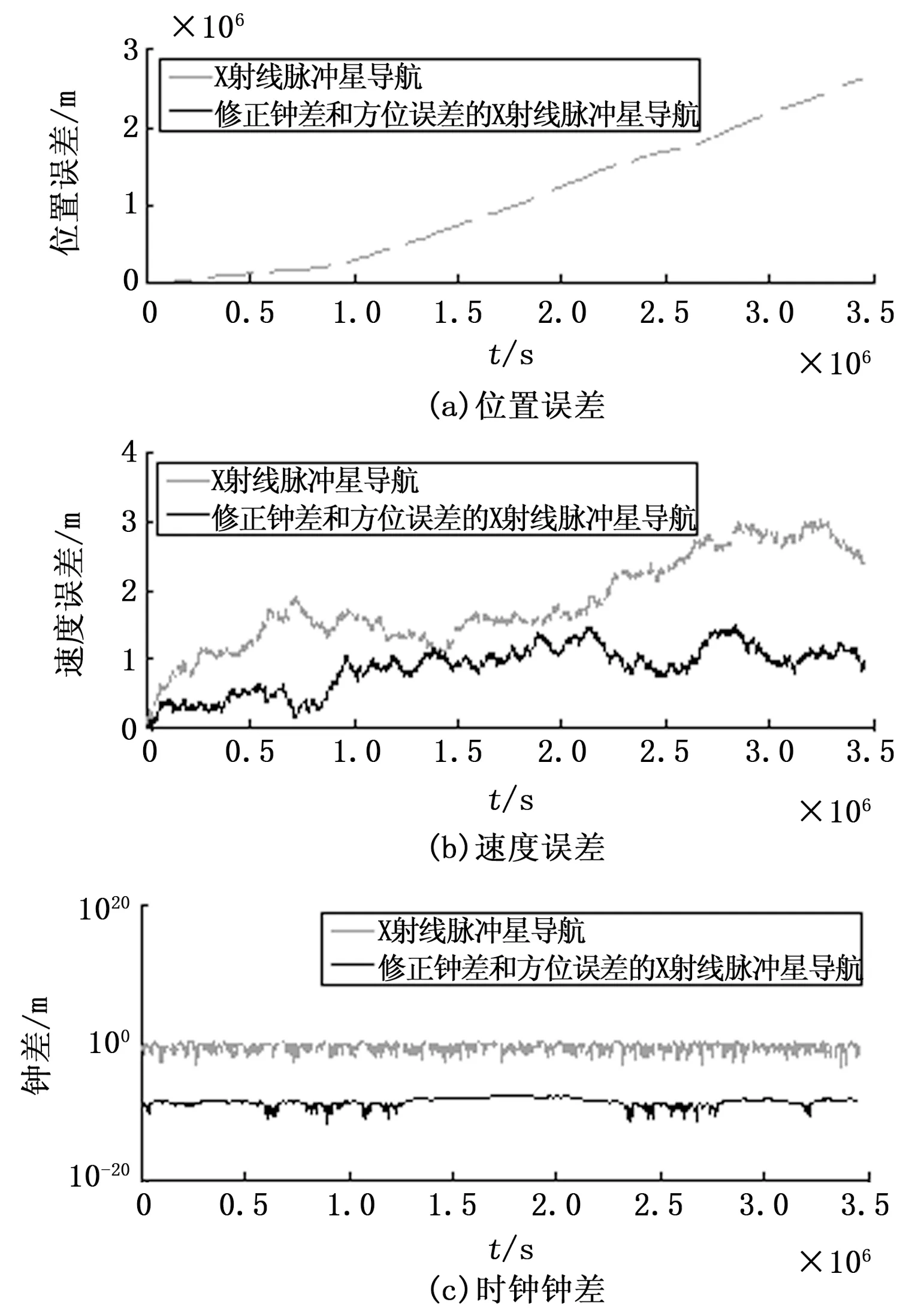
圖1 修正鐘差和方位誤差的X射脈沖星導(dǎo)航與X射線脈沖星導(dǎo)航對(duì)比

圖2 修正鐘差和方位誤差的X射脈沖星導(dǎo)航與修正方位誤差X射線脈沖星導(dǎo)航對(duì)比
圖2給出了修正鐘差和方位誤差的X射線脈沖星導(dǎo)航和修正鐘差X射線脈沖星導(dǎo)航的對(duì)比結(jié)果。兩種導(dǎo)航方法都修正了時(shí)鐘鐘差對(duì)導(dǎo)航的影響,突出了脈沖星方位偏差對(duì)導(dǎo)航精度的影響。在鐘差修正的情況下,修正鐘差和方位誤差的X射線脈沖星導(dǎo)航有效的抑制了脈沖星方位造成的系統(tǒng)偏差對(duì)導(dǎo)航精度影響。同修正鐘差的X射線脈沖星導(dǎo)航,該導(dǎo)航方法提供了更好的導(dǎo)航精度。
4 總結(jié)
本文研究了時(shí)鐘漂移及脈沖星方位誤差對(duì)導(dǎo)航精度的影響,提出了一種修正鐘差和脈沖星方位誤差的導(dǎo)航方法。本文將時(shí)鐘鐘差與方位誤差造成的系統(tǒng)偏差作為增廣狀態(tài)變量并使用多普勒差分量測(cè),利用聯(lián)邦UKF融合導(dǎo)航信息。仿真結(jié)果表明,該導(dǎo)航方法能夠有效的抑制方位誤差,提高星載時(shí)鐘鐘差,并提供更高的導(dǎo)航估計(jì)精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
