電力巡檢吊艙大容量存儲系統的設計與實現
2018-08-24 07:50:26增光
計算機測量與控制 2018年8期
關鍵詞:系統
,, ,,,增光
(1.廣東電網有限責任公司電力科學研究院,廣州 510000; 2.鄭州航空工業管理學院,鄭州 450000;3.中國航空工業集團公司洛陽電光設備研究所,河南 洛陽 471000; )
0 引言
國內電力線路具有分布范圍廣、地形環境復雜等特點,特別是有些桿塔線路架設在高山、峽谷、河流等地方,不便于巡線人員到達,采用人工巡線的方法并不能很好的完成巡檢任務。隨著無人機和光電巡檢吊艙技術的發展和應用,無人機掛載光電巡檢吊艙逐漸成為電力巡線的一個重要的手段,彌補了傳統巡檢方式的不足,提高巡檢效率。
電力巡檢數據信息是無人機電力巡線的重要目的,也是電力巡檢自動化、數字化的重要組成部分;是后期任務管理、數據分析、數據存檔、數據查詢的重要數據源。無人機電力巡檢數據存儲系統是巡檢系統的一個必不可少的組成部分。
通常具有自主任務功能的無人機電力巡檢吊艙具有以下幾種傳感器:可見光攝像機、紅外傳感器、照相機、定位定姿系統。可見光攝像機主要是獲取電力設施的高清視頻影像,從整體上觀察電力設施是否存在缺陷;紅外傳感器獲取電力設施的紅外熱圖數據,對異常發熱點進行成像探測,判斷電力設施是否存在破損故障;照相機提供電力設施高分辨率照片,用于觀察電力設施的局部細節,查看銷釘級的故障;定位定姿系統主要為吊艙提供GPS位置和姿態信息,用于電力巡檢吊艙的自動精確瞄準目標。以上電力巡檢吊艙的傳感器信息作為巡檢數據均需要進行存儲和記錄。由于常規巡檢用無人機的作業時間一般不超過4小時,所以電力巡檢吊艙存儲系統滿足4小時的數據記錄要求。
1 系統設計原則
存儲系統主要滿足巡檢吊艙各類數據采集和存儲功能,數據內容包括可見光視頻數據、紅外熱圖數據、照相機照片、GPS信息、巡檢吊艙狀態信息等。存儲系統位于電力巡檢吊艙的內部,所以該存儲系統需要和吊艙進行一體化集成設計,既要滿足電力巡檢吊艙的整體設計要求,又要滿足大容量數據的存儲需求。
存儲系統設計時需要從以下幾個方面進行考慮:
功耗:電力巡檢吊艙內部是一個氣密空間,如果發熱量過大,不利于其內部各傳感器性能的發揮,同時影響元器件的工作壽命,所以吊艙內部各模塊功耗要嚴格控制。存儲系統功耗不宜過大,設計目標在15 W以內。
密封性:巡檢吊艙是一個密封的整體,存儲系統的數據進行存儲和導出時,不能影響電力巡檢吊艙整體的密封性。存儲系統對外接口的插座采用密封插座形式。
小體積:存儲系統位于吊艙的內部,吊艙內部結構緊湊,對各個模塊的體積有嚴格的要求,所以存儲系統需要以盡可能小的體積,完成其功能。
抗振性:無人機進行巡檢任務時,巡檢吊艙處于機載振動環境中,存儲系統需要連接牢固、可靠,可以在機載振動環境中進行長期穩定的工作[1]。
嵌入式:在整個運行過程中,沒有用戶界面可以觀察,在進行存儲、停止存儲、系統非正常斷電的過程中不應損傷存儲器和存儲系統,且存儲系統再次通電能夠正常運轉。
大容量:由于存儲系統需要記錄巡檢吊艙采集的可見光視頻信息、紅外熱圖信息、可見光照片、控制指令信息、位置狀態信息等,數據量很大,存儲系統需要能夠同時處理眾多類型的數據信息并能長時間存儲。無人機巡檢作業的最大時長定為4小時,存儲系統需要完成巡檢周期內的數據存儲工作。
2 系統設計和實現
2.1 系統接口和組成
根據存儲系統需要實現的功能,存儲系統需要和各傳感器進行交聯和采集數據。存儲系統對外的接口包括以下幾個方面:
1)可見光視頻的SDI接口;
2)紅外熱圖的網絡接口;
3)照相機的USB接口;
4)定位定姿系統的串行通訊接口;
5)命令狀態信息的串行通訊接口;
6)對外導出數據的網絡接口。
存儲系統需要具備以上接口,同時存儲系統具備處理數據和存儲數據的能力。按照功能模塊劃分,存儲系統分為以下幾個部分,如圖1所示,存儲系統包括:SDI視頻信號存儲模塊、熱圖網絡數據存儲模塊、定位數據存儲模塊、命令狀態數據存儲模塊、USB照相數據接口模塊和數據導出模塊。

圖1 存儲系統功能組成圖
2.2 數據容量分析
存儲系統的容量需要解決的首要問題,現在分別對存儲的各個類型的數據進行逐個分析計算。視頻信號為SDI高清視頻,以分辨率1 920×1 080,幀率25 p來計算,根據每秒的數據量=分辨率×每個像素需要的字節數×幀率計算,1 920×1 080×3×25=155520000B≈155 MB(注B=byte,b=bit), 4個小時的數據量為:4小時×60分×60秒×155 MB=2232000 MB≈2.23 TB。根據計算所得,視頻信號如果按照每個像素進行存儲數據會非常龐大,不利于后期的存儲和數據分析。根據后期數據處理的要求,視頻信號在滿足清晰度的情況下,可以通過壓縮以節省存儲空間。視頻信號按照H264編碼方式進行壓縮存儲,可以很大規模的降低存儲容量,H264編碼方式對1 080 P視頻信號的極高碼率約為2 MB/s,4個小時的數據量約為4小時×60分×60秒×2 MB≈28 GB,可見通過壓縮編碼處理,存儲4個小時1 080 p的SDI高清視頻信號需要的存儲空間約為28 GB。采用壓縮處理的方法需要視頻存儲模塊具有SDI信號采集、壓縮編碼、存儲的能力。
紅外熱圖數據以常見的分辨率640×480為例,每個像素存儲需要2個字節,由于紅外熱圖數據需要后期進行每一點的溫度測量和解算,所以紅外熱圖數據需要進行無壓縮的原始數據存儲。每個拍攝點的時間約為1秒左右,每秒鐘采集9幀熱圖畫面,每秒的數據量=640×480×2×9=5 529 600 B≈5.5 MB,4個小時的數據量為:4小時×60分×60秒×5.5 MB≈79 200 MB≈79 GB。根據數據率(5.5 MB×8=44 Mb)的計算,紅外熱圖數據的網口傳輸率不低于100 Mbps。(目前網口分3種10兆網、百兆網和千兆網)
定位定姿串行數據,以100 ms為周期,每個周期32個字節的數據計算,4個小時的數據量為:4小時×60分×60秒×(10×32)≈4.6 MB。
命令狀態串行數據,類似定位定姿串行數據,數據量約為4.6 MB[2]。
照相機的照片存儲在相機的存儲卡內,這樣可以保證照片的存儲照片的速度。進行照片導出和刪除操作時通過相機的USB口進行。

圖2 存儲系統原理框圖
根據上述計算結果:4個小時總的數據存儲容量約為:28 G+79 G+4.6 M+4.6 M≈107 G,所以存儲容量需要大于107 GB。數據的存儲速度約為:2 M+5.5 M=7.5 M(B/s)=7.5×8 M(b/s)=60 M(b/s),存儲器的存儲速度需要大于60 Mb/s,根據冗余設計的原則,存儲器的存儲速度不低于100 Mb/s。
由于存儲系統位于巡檢吊艙的內部,存儲數據需要在巡檢結束時需要進行導出。導出時間設計上不大于30分鐘。以107 GB數據量計算,數據傳輸率:107 G×8/30/60 bps≈476 Mbps,目前通用的接口中USB3.0和千兆網口可以滿足要求。USB3.0的最高傳輸率為5.0 Gbps,千兆網的最高傳輸率為1.0 Gbps。由于數據導出時需要通過密封連接器進行導出電纜的連接,同時考慮到吊艙的機載環境,從接口的可靠性、信號傳輸的抗干擾能力、接口應用的廣泛性等方面綜合考慮,選擇千兆網口作為數據的導出接口。
2.3 存儲系統的選型與構建
根據設計需求,存儲系統處理機既要滿足體積小、功耗低,又要滿足多接口需要,還要滿足數據的存儲容量和數據存儲速度的要求。經過對比選擇,采用以ATOM D2550低功耗處理器為核心的3.5″工業主板,板塊尺寸為146 mm×102 mm,該尺寸的板塊可放入吊艙內部,滿足體積小的要求;該主板具有1.86 GHz的處理器,配置DDR3 2 GB板載內存,具有2個千兆網口、6個串口、2個USB口和1個miniPCIE插槽和1個miniSATA插槽,滿足存儲系統的接口要求;同時系統最大功耗為13 W,低于設計功耗15 W,滿足存儲系統的功耗要求;內存等采用板載貼片的形式,散熱采用冷板的結構形式,滿足機載振動環境的要求;該主板為工業級使用環境,滿足系統的環境溫度要求。吊艙對外的網絡采用雷莫公司的氣密連接器,滿足吊艙的整體氣密要求,同時又滿足千兆網的傳輸要求。
存儲系統的miniSATA插槽配備1個miniSATA硬盤,容量為240 G,寫入速度為530 MB/s,滿足存儲系統的存儲容量要求和存儲速度要求。
系統miniPCIE插槽配備miniPCIE接口的SDI視頻采集卡,該采集卡具備以下幾個功能:
1)SDI視頻接口1路輸入,1路環出;
2)可采集分辨率1 920×1 080,60 p/50 p/30 p/25 p的SDI信號;
3)MiniPCIE接口形式;
4)具有硬件壓縮功能。
此接口的采集卡可以完成SDI信號的采集、壓縮、環出功能。
存儲系統的原理如圖2所示。
存儲系統的硬件組成包括多接口低功耗工業主板、miniSATA大容量高速電子盤和miniPCIE接口的SDI采集卡等。
2.4 操作系統的選擇
存儲系統的硬件構建完成后,存儲系統的操作系統也是其重要組成部分;傳統的WindowsXP系統使用方便、軟件兼容性強、開發環境選擇多,但是該存儲系統集成在吊艙內部,沒有顯示輸出,具有操作不可見等特點,而吊艙的使用過程中,不會專門對操作系統進行關機。吊艙斷電情況下容易造成XP系統崩潰,XP系統的特性也決定了其不太適合做嵌入式操作系統。
需要選擇一種既具有Windows系統的優點,又符合嵌入式系統的使用需求,Windows XPE嵌入式系統為我們完美的解決了這個問題。Windows XPE是Windows XP系統的組件版本,擁有Windows XP系統的所有功能和屬性,具有系統內核小、占用系統資源少、啟動速度快、擁有寫保護、軟件兼容性強、基于win32編程、可移植性強、可維護性高等特點。
Windows XPE嵌入式系統需要在存儲系統的硬件基礎上開發完成,首先在存儲系統處理機上建立Windows XPE開發環境,然后通過硬件平臺分析、制作硬件信息組件、初始化配置、添加系統組件和功能組件、生成鏡像和部署XPE系統等步驟完成XPE系統的生成和應用。XPE嵌入式系統具體的生成方法和步驟參考相關文檔[3]。
2.5 存儲系統軟件
存儲系統軟件采用VS2008開發環境開發,以C++語言為基礎,進行多線程軟件開發,完成多種數據的同時存儲。
存儲軟件需要完成下面幾個方面的功能:
1)接受上位機命令,解析命令,響應存儲指令;
2)將當前的存儲狀態進行整理上報;
3)對各個文件進行分段存儲,防止突然掉電造成大文件的丟失;
4)解析從定位定姿系統收到的時間信息,為各命令和文件提供時間基準;
5)存儲可見光視頻信息;
6)存儲紅外網絡熱圖原始數據;
7)存儲定位定姿信息;
8)存儲命令和狀態信息。
2.5.1 任務設計和優先級設置
本存儲系統要同時完成4種數據的存儲。為保證存儲任務的并行處理,每種數據存儲對應一個線程,線程之間使用信號量實現線程同步。命令狀態數據存儲線程接收并解析上位機的控制指令,優先級設置為高于平常(Above normal);視頻存儲線程、紅外熱圖數據存儲線程、定位定姿信息存儲線程優先級設置為正常(normal)。
2.5.2 命令串口數據處理任務
命令狀態串口數據存儲線程中串口接收數據以異步I/O方式進行,串口數據為一幀數據,該數據具有幀頭、幀尾、有效數據和檢驗。查找接收一幀數據的時候,先查找數據的幀頭,再接收整幀數據,最后對整幀數據的有效性性進行驗證。對有效幀進行解析處理,解析出上位機命令,并對其他線程進行控制,其流程如圖3所示。
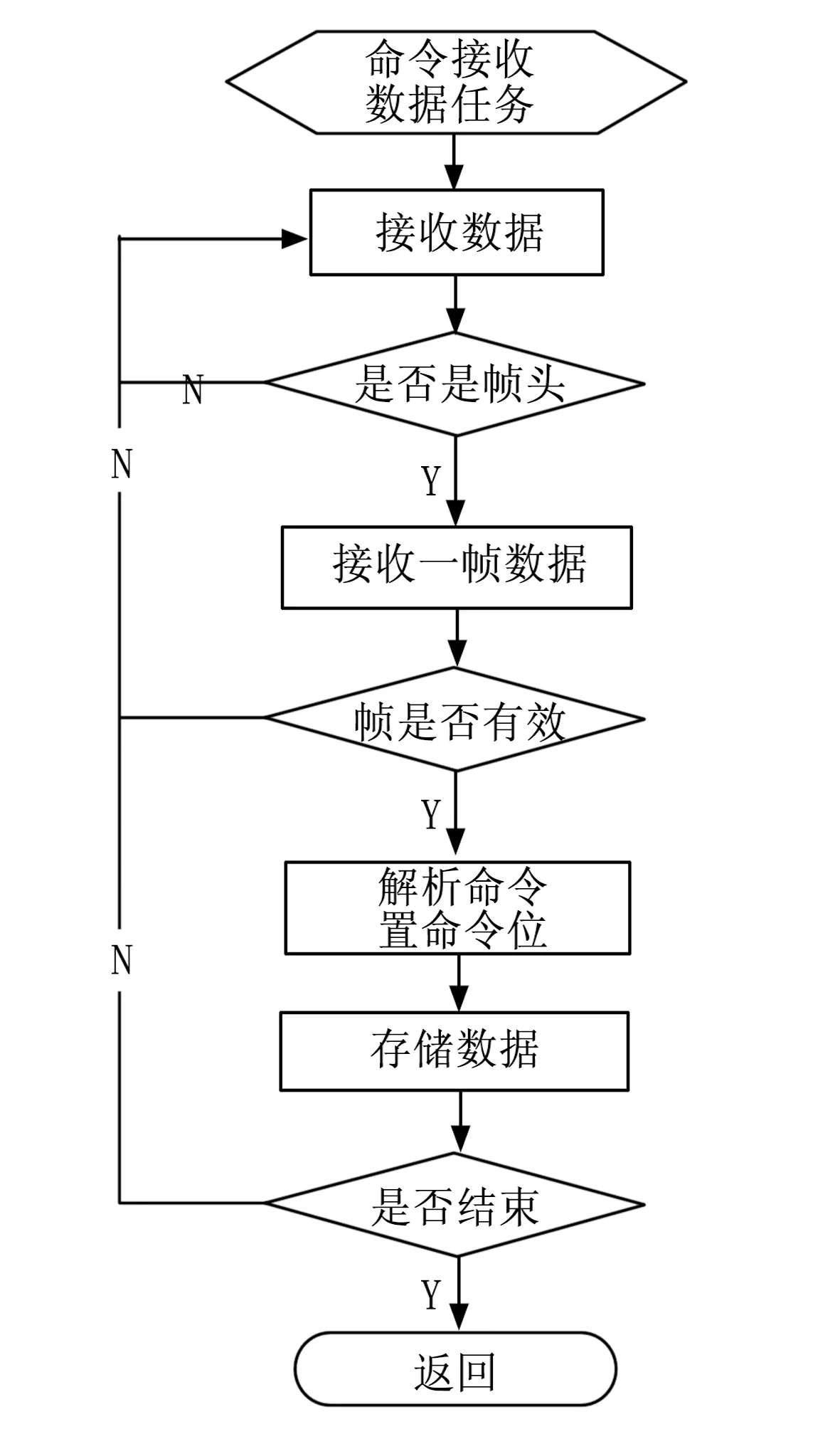
圖3 串口數據接收流程圖
定位定姿信息存儲線程流程和命令串口數據存儲線程流程類似,不再單獨說明。
2.5.3 紅外熱圖數據存儲任務
紅外組件和存儲系統之間的數據交互以網絡通信的模式進行。網絡通信采用Windows Sockets套接字的方式來實現,存儲系統為服務器端(Server),紅外熱圖源為客戶端(Client),兩者之間以非阻塞的方式進行異步I/O通訊。
存儲系統紅外熱圖數據存儲邏輯如下:進行存儲任務之前,首先創建連接并初始化,設置非阻塞模式,設置超時時間,進行連接,然后接收數據,分析數據,存儲數據,重復此過程。在接收數據的過程中,如果超過5秒沒有接收到熱圖數據,認為網絡通訊故障,重新進行網絡連接。紅外熱圖進行數據存儲時,如果連續存儲時間超過10分鐘(用戶設置時間),則將數據存入新文件,即防止單個文件過大,又防止系統突然掉電造成大文件丟失[4]。熱圖存儲流程如圖4所示。
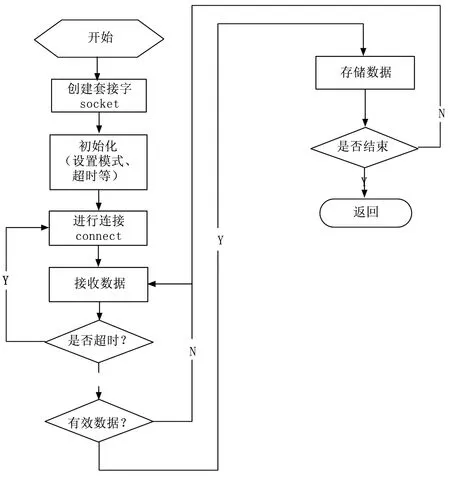
圖4 熱圖數據任務流程圖
2.5.4 視頻存儲任務
存儲系統通過視頻采集卡采集SDI視頻信號,視頻采集卡完成視頻信號的硬件壓縮功能,存儲系統軟件調用視頻采集卡的底層驅動完成視頻的分段存儲。由硬件和底層驅動完成存儲的方式可以大大降低CPU的占用率,減少內存使用,簡化存儲系統的程序。存儲視頻線程循環檢索存儲命令,根據存儲命令進行視頻的存儲工作[5]。
3 試驗結果與分析
該存儲系統在無人機電力精細巡檢吊艙的進行了設計實現和試驗驗證,并隨吊艙整機系統進行了溫度試驗、振動試驗等環境試驗。試驗過程中存儲系統工作穩定。溫度試驗驗證了存儲系統的高低溫性能滿足吊艙的整機要求;振動試驗驗證了存儲系統的抗振性滿足吊艙的整機要求;氣密性試驗驗證了存儲系統數據導出口設計滿足吊艙氣密性要求;對吊艙進行了多次的上下電試驗,存儲系統均工作正常,未出現系統崩潰等現象,滿足吊艙上下電工作模式的使用需求;同時對系統進行了多次連續工作試驗,存儲系統多次工作中的典型指標值如表1所示[6]。

表1 存儲軟件運行系統參數表
電力巡檢吊艙的存儲系統的XPE操作系統進行了必要性裁剪,使用時只占用極少的內存;同時使用SDI視頻硬件壓縮卡大大降低的CPU使用率,同時又降低了存儲系統的功耗,滿足長時間工作要求。占用硬盤容量、功耗、數據導出速率均滿足設計要求。
4 結論
針對電力巡檢吊艙多接口數據設計制造了大容量存儲系統,并集成于電力巡檢吊艙內部進行了實踐應用。使用結果表明該存儲系統可以正確、完整地記錄所需的多種類型數據,并且運行穩定、可靠,可以滿足無人機電力巡檢吊艙連續記錄4個小時的存儲需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
